社団法人 電子情報通信学会
THE INSTITUTE OF ELECTRONICS,
INFORMATION AND COMMUNICATION ENGINEERS
信学技報
TECHNICAL REPORT OF IEICE.
[ポスター講演]スパース正則化項の和を用いた 複素離散値ベクトル再構成
早川 諒
†
林 和則††
†
京都大学大学院情報学研究科 〒606-8501
京都市左京区吉田本町††
大阪市立大学大学院工学研究科 〒558-8585
大阪市住吉区杉本3-3-138 E-mail: [email protected], [email protected]
あらまし 本稿では,複素離散値ベクトルをその線形観測から再構成するための
SCSR(Sum of Complex Sparse
Regularizers
)最適化問題を提案する.SCSR
最適化では,スパース正則化項の和を複素離散値ベクトルに対する正則化項として用いる.また,SCSR最適化を重み付き
SCSR
最適化に拡張し,重み付きSCSR
最適化とその目的関数 のパラメータ更新を繰り返し行う手法であるIW-SCSR(Iterative Weighted SCSR)も提案する.計算機シミュレー
ションにより,提案手法が劣線形観測から複素離散値ベクトルを再構成できることを示す.キーワード 複素離散値ベクトル再構成,凸最適化,ADMM(Alternating Direction Method of Multipliers)
[Poster Presentation] Sum of Complex Sparse Regularizers Optimization for Complex Discrete-Valued Vector Reconstruction
Ryo HAYAKAWA † and Kazunori HAYASHI ††
† Graduate School of Informatics, Kyoto University, Yoshida-Honmachi, Sakyo-ku, Kyoto, 606-8501 Japan
†† Graduate School of Engineering, Osaka City University, 3-3-138 Sugimoto, Sumiyoshi-ku, Osaka, 558-8585 Japan
E-mail: [email protected], [email protected]
Abstract In this paper, we propose sum of complex sparse regularizers (SCSR) optimization problem for the reconstruction of complex discrete-valued vector from its linear measurements. In the SCSR optimization, we use the sum of sparse regularizers as a regularizer for the complex discrete-valued vector. We extend the SCSR op- timization to the weighted SCSR optimization and propose an iterative approach called iterative weighted SCSR (IW-SCSR), where we iterate the weighted SCSR optimization and the update of the parameters in the objective function. Simulation results show that the propose method can reconstruct the complex discrete-valued vector from its underdetermined linear measurements.
Key words Complex discrete-valued vector reconstruction, convex optimization, alternating direction method of multipliers (ADMM)
1.
ま え が きMIMO
(Multiple-Input Multiple-Output
)信号検出[1–3]
や
M2M
(Machine-to-Machine
)通信でのマルチユーザ検出[4–6]
を始めとして,通信システムにおいては複素離散値ベクトルをその線形観測から再構成する問題がよく現れる.とくに 過負荷
MIMO
システム[7–11]
やFTN
(faster-than-Nyquist
) 伝送[12–15]
などのように観測の数が不十分な状況においては,LMMSE
(Linear Minimum Mean-Square-Error
)法などの線 形の手法の特性は大きく劣化する.また,最尤推定に基づく手法は良い特性を達成可能であるが,問題のサイズに対して計算 量が指数的に増大してしまう.そのため,大規模な離散値ベク トルの再構成においては低演算量な手法が必要となる.
低演算量なアプローチとして,確率伝播法や期待値伝播法の アイデアを応用した手法が提案されている
[16–19]
.これらの アルゴリズムの導出や理論解析においては大システム極限が 仮定されており,有限サイズの問題に対しては特性が劣化する 場合がある.一方で,実数領域における凸最適化に基づく手法
[20–22]
も提案されているが,これらの手法を複素離散値ベクトルの再構成に利用する場合,実部と虚部の依存関係を陽に
— 1 — - 103 -
一般社団法人 電子情報通信学会 信学技報
THE INSTITUTE OF ELECTRONICS,
INFORMATION AND COMMUNICATION ENGINEERS
This article is a technical report without peer review, and its polished and/or extended version may be published elsewhere.
IEICE Technical Report
WBS2018-46,ITS2018-29,RCC2018-77(2018-12)
考慮することができない.
本稿では,実数領域における凸最適化に基づく手法の一つであ る
SOAV
(Sum of Absolute Values
)最適化[22]
のアイデアを 拡張した複素離散値ベクトル再構成手法を提案する.提案最適化 問題のSCSR
(Sum of Complex Sparse Regularizers
)最適化 は複素数領域における最適化問題であり,スパース正則化項の和 を複素離散値ベクトルに対する正則化項として用いる.ADMM
(
Alternating Direction Method of Multipliers
)[23–27]
に基 づくアルゴリズムによって,SCSR
最適化問題に収束する点列 を得られる.さらに,SCSR
最適化を重み付きSCSR
最適化 に拡張し,重み付きSCSR
最適化とその目的関数のパラメー タ更新を繰り返し行うIW-SCSR
(Iterative Weighted SCSR
) を提案する.計算機シミュレーションにより,提案手法のSER
(
Symbol Error Rate
)特性を評価する.本稿では,以下の記法を用いる.すべての実数からなる 集合を
R
,すべての複素数からなる集合をC
とする.Re {·}
と
Im{·}
はそれぞれ実部と虚部を表す.虚数単位をj
,転置を
(·)
T,エルミート転置を(·)
H,N × N
単位行列をI
N,成 分がすべて1
のベクトルを1
,成分が0
のベクトルを0
と 書く.ベクトルu = [u
1· · · u
N]
T∈ C
N に対して,そのℓ
1ノ ル ム と
ℓ
2 ノ ル ム を そ れ ぞ れ∥ u ∥
1= ∑
Nn=1
| u
n|
お よ び∥u∥
2= √∑
Nn=1
|u
n|
2と書く.[u]
nはu
のn
番目の成分を 表す.符号関数をsign(·)
で表す.関数h : C
N→ R
に対して,その近接写像を
prox
h(u) = arg min
s∈CN
{
h (s) + 1
2 ∥ s − u ∥
22}
とする.
2.
複素離散値ベクトル再構成複素離散値ベクトル
x = [x
1· · · x
N]
T∈ C
N⊂ C
N をその 線形観測y = Ax + v ∈ C
M(1)
から再構成する問題を考える.ここで,C = { c
1, . . . , c
L}
は未 知ベクトルx
の成分がとりうる値の集合である.未知ベクトルx
の分布はPr (x
n= c
ℓ) = p
ℓ(∑
Lℓ=1
p
ℓ= 1
)で与えられると する(ℓ = 1, . . . , L
).A ∈ C
M×Nは観測行列であり,v ∈ C
M は平均0
で共分散行列σ
v2I
M の加法性雑音ベクトルである.実数領域における離散値ベクトル再構成アルゴリズムは実部 と虚部の依存関係を考慮できないため,一般の複素数領域の問題 には適切でない場合がある.
C = { 1 + j, − 1 + j, − 1 − j, 1 − j }
のようにC
の要素の実部と虚部が独立である場合,式(1)
の複 素数領域のモデルは実数領域のモデル¯
y = ¯ A x ¯ + ¯ v (2)
に変換することができる.ここで,y ¯ = [
Re { y }
TIm { y }
T]
T∈ R
2M,x ¯ = [
Re{x}
TIm{x}
T]
T∈ R
2N,v ¯ = [
Re{v}
TIm{v}
T]
T∈ R
2M およびA ¯ =
[ Re { A } − Im { A } Im { A } Re { A }
]
∈ R
2M×2N(3)
である.このような場合,元の複素離散値ベクトル
x
を実離散値 ベクトルx ¯
の再構成によって求めてもよいが,C
の要素の実部と 虚部が独立でない場合は,そのようなアプローチは不適切である.例えば,
C = {
e
j(ℓ−1)π/4| ℓ = 1, . . . , 8
}
の場合,実数領域でのアプローチでは実離散値ベクトル
x ¯ ∈ { 1,
√12
, 0, −
√12, − 1 }
2Nを再構成することになり,実部と虚部の依存性を考慮すること ができない.このような場合,未知ベクトル
x
を複素数領域で 直接再構成するのが望ましいと考えられる.3.
提 案 手 法3. 1 SCSR
最適化実数領域における手法である
SOAV
最適化[22]
のアイデア を拡張し,SCSR
最適化を提案する.提案SCSR
最適化問題はminimize
s∈CN
∑
L ℓ=1q
ℓg
ℓ(s − c
ℓ1) + λ ∥ y − As ∥
22(4)
で与えられる.ここでλ
とq
ℓ> = 0
(ℓ = 1, . . . , L
)はパラメー タである.関数g
ℓ( · )
はスパース正則化の関数であり,本稿ではh
1(u) = ∥u∥
1=
∑
N n=1√ Re{u
n}
2+ Im{u
n}
2, (5)
h
2(u) = ∥ Re { u }∥
1+ ∥ Im { u }∥
1(6)
=
∑
N n=1(|Re{u
n}| + |Im{u
n}|) (7)
の
2
種類の正則化を考える.h
1(·)
は複素数の絶対値に基づくℓ
1正則化であり,h
2( · )
は実部と虚部それぞれに実数領域のℓ
1正則化を適用する.この正則化は
x − c
ℓ1
の成分のいくつかが0
になることに基づいており,∑
Lℓ=1
q
ℓg
ℓ(s − c
ℓ1)
は複素離散 値ベクトルx ∈ C
Nに対する正則化と考えることができる.3. 2
スパース正則化関数の選択SCSR
最 適 化(4)
に お け る ス パ ー ス 正 則 化 関 数g
ℓ( · )
は ,未 知 変 数 が と る 値 の 集 合C
に 応 じ てh
1( · )
お よ びh
2( · )
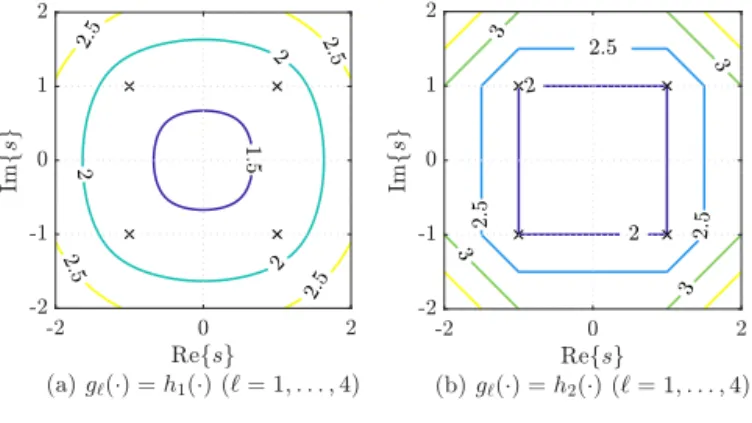
か ら 選 択 す る 必 要 が あ る .図1
は ,(c
1, c
2, c
3, c
4) = (1 + j, −1 + j, −1 − j, 1 − j)
お よ び(q
1, q
2, q
3, q
4) = (0.25, 0.25, 0.25, 0.25)
の 場 合 の 正 則 化 関 数∑
Lℓ=1
q
ℓg
ℓ(s − c
ℓ)
の 等 高 線 を 示 す.図1(a)
と 図1(b)
は そ れ ぞ れg
ℓ( · ) = h
1( · )
お よ びg
ℓ( · ) = h
2( · )
(ℓ = 1, . . . , 4
)の と き の 等 高 線 を 示 す.2
つ の 等 高 線 は 大 き く 異 なって お り,g
ℓ(·) = h
1(·)
の 場 合 は∑
4ℓ=1
q
ℓg
ℓ(s − c
ℓ)
はs = 0
の み で 最 小 値 を 取 る の に 対 し ,g
ℓ(·) = h
2(·)
の 場 合 は 集 合{ s | Re { s } ∈ [ − 1, 1], Im { s } ∈ [ − 1, 1] }
上 で 最 小 値 を と る .x ∈ C
N の 離 散 性 を 用 い る と い う 観 点 か ら は ,正 則 化 関 数∑
4ℓ=1
q
ℓg
ℓ(s − c
ℓ)
は 少 な く と もC =
{1 + j, −1 + j, −1 − j, 1 − j}
の 要 素 に 対 し て 最 小 値 を 取 る べきであるから,この場合は図1(b)
にあるようにg
ℓ(·)
と し てh
2( · )
を 用 い る の が 望 ま し い と い え る .別 の 例 と し て,(c
1, c
2, c
3, c
4, c
5) = (0, 1 + j, − 1 + j, − 1 − j, 1 − j)
およ び(q
1, q
2, q
3, q
4, q
5) = (0.8, 0.05, 0.05, 0.05, 0.05)
の場合の等高 線を図2
に示す.図2(a)
ではg
1(·) = h
1(·)
およびg
ℓ(·) = h
2(·)
図
1
関数∑
4ℓ=1
q
ℓg
ℓ(s − c
ℓ)
の等高線:(c
1, c
2, c
3, c
4) = (1+j, − 1+
j, − 1 − j, 1 − j)
および(q
1, q
2, q
3, q
4) = (0.25,0.25,0.25, 0.25)
であり,バツ印はc
ℓ(ℓ= 1, . . . , 4)を示す.
図
2
関 数∑
5ℓ=1
q
ℓg
ℓ(s − c
ℓ)
の 等 高 線:(c1, c
2, c
3, c
4, c
5) = (0, 1 + j, − 1 + j, − 1 − j, 1 − j)
および(q
1, q
2, q
3, q
4, q
5) = (0.8,0.05, 0.05, 0.05, 0.05)
であり,バツ印はc
ℓ(ℓ= 1, . . . , 5)
を示す.
(
ℓ = 2, . . . , 5
)であり,図2(b)
ではg
ℓ( · ) = h
2( · )
(ℓ = 1, . . . , 5
) である.図2(b)
の正則化では実部と虚部を別々に扱うので,実 部と虚部のどちらか一方のみが0
となりやすい.ところが集合C = {0, 1 + j, −1 + j, −1 − j, 1 − j}
上では実部と虚部は同時 に0
となるので,この場合は図2(a)
にあるようなg
1( · ) = h
1( · )
およびg
ℓ( · ) = h
2( · )
(ℓ = 2, . . . , 5
)で定まる正則化関数を用い るのがよいと期待される.3. 3 ADMM
に基づく最適化アルゴリズムADMM [23–27]
のアプローチに基づいて,SCSR
最適化(4)
に対する最適化アルゴリズムを導出する.最適化問題(4)
は,新たな変数
z
1, . . . , z
L∈ C
Nを用いてminimize
s,z1,...,zL∈CN
∑
L ℓ=1q
ℓg
ℓ(z
ℓ− c
ℓ1) + λ ∥y − As∥
22subject to s = z
ℓ(ℓ = 1, . . . , L) (8)
と書き換えられる.さらに,式(8)
はADMM
の標準形minimize
s∈CN,z∈CLN
f (s) + g (z)
subject to Φs = z (9)
に変形できる.ここで,
z = [
z
1T· · · z
TL]
T∈ C
LN,f (s) = λ ∥ y − As ∥
22,g (z) = ∑
Lℓ=1
q
ℓg
ℓ(z
ℓ− c
ℓ1)
,お よ びΦ =
Algorithm 1 Proposed Algorithm for SCSR Optimiza- tion (9)
Input: y ∈ C
M, A ∈ C
M×NOutput: x ˆ ∈ C
N1:
Fix ρ > 0, z
0∈ C
LN, and w
0∈ C
LN 2:for k = 0 to K − 1 do
3:
s
k+1= (
ρLI
N+ λA
HA )
−14:
· (
ρ ∑
L ℓ=1( z
ℓk− w
kℓ)
+ λA
Hy )
5:z
k+1ℓ= c
ℓ1 + prox
qℓ2ρgℓ
( s
k+1+ w
ℓk− c
ℓ1 )
6:
(ℓ = 1, . . . , L)
7:
w
ℓk+1= w
kℓ+ s
k+1− z
k+1ℓ(ℓ = 1, . . . , L)
8:end for
9:
x ˆ = s
K[I
N· · · I
N]
T∈ R
LN×Nである.式(9)
に対するADMM
に基 づく最適化アルゴリズムはAlgorithm 1
のようになる.Algorithm 1
においては,g
ℓ( · )
の候補であるh
1( · )
とh
2( · )
に関する近接写像の計算が必要となる.[27]
の結果から,γh
1( · )
(
γ > 0
)の近接写像は[ prox
γh1(u) ]
n
=
( | u
n| − γ) u
n|u
n| ( | u
n| > = γ)
0 ( | u
n| < γ)
(10)
と計算できる.ここで,
u = [u
1· · · u
N]
T∈ C
Nである.ま た,γh
2( · )
の近接写像はprox
γh2(u)
= arg min
s∈CN
{
γh
2(s) + 1
2 ∥ s − u ∥
22}
(11)
= arg min
s=sR+jsI∈CN
(
sR,sI∈RN) {(
γ ∥ s
R∥
1+ 1
2 ∥ s
R− u
R∥
22)
+ (
γ ∥ s
I∥
1+ 1
2 ∥ s
I− u
I∥
22)}
(12)
と書ける.ここで,u
R:= Re { u } ∈ R
Nおよびu
I:= Im { u } ∈ R
Nはそれぞれu ∈ C
N の実部と虚部である.式(12)
におけ るs ∈ C
Nに関する最小化はs
R∈ R
Nとs
I∈ R
Nに関する最 小化に分離可能である.よってprox
γh2(u)
は実数領域におけ るℓ
1ノルムの近接写像を用いて[ prox
γh2(u) ]
n
= [
prox
γ∥·∥1
(u
R) ]
n
+ j · [ prox
γ∥·∥1
(u
I) ]
n
(13)
= sign ( [u
R]
n)
max ( [u
R]
n− γ, 0 ) + j · sign (
[u
I]
n)
max ([u
I]
n− γ, 0 )
(14)
と書ける.ここで,[u
R]
nおよび[u
I]
nはそれぞれu
Rとu
Iのn
番目の成分である.式(10)
と(14)
を用いて,Algorithm 1
で必要となる近接写像の計算を行うことができる.Algorithm 1
によるx
の推定値{ s
k}
の収束性に関して,以 下の定理が成り立つ.
Theorem 1.
最適化問題(9)
のラグランジュ関数L (s, z, θ) :=
f (s) + g (z) + 2Re{θ
H(Φs − z)}
が鞍点をもつとする.すな わち,ある(s
∗, z
∗, θ
∗)
が存在してすべてのs, z, θ
に対してL (s
∗, z
∗, θ) < = L (s
∗, z
∗, θ
∗) < = L (s, z, θ
∗) (15)
が成り立つとする.また,スパース正則化の関数g
ℓ( · )
としてh
1( · )
とh
2( · )
のいずれかを用いるとする.このとき,Algo- rithm 1
によって得られる点列{
s
k}
(
k = 1, 2, . . .
)は(9)
の 解に収束する.Proof. [28]
のTheorem 1
参照.3. 4 IW-SCSR
本項では,
IW-SOAV [10]
のアイデアを応用し,SCSR
最適 化を拡張した重み付きSCSR
最適化に基づくIW-SCSR
を提 案する.関数
g
ℓ( · )
がh
1( · )
やh
2( · )
のように成分ごとの関数であると 仮定し,SCSR
最適化(4)
を重み付きSCSR
最適化minimize
s∈CN
∑
L ℓ=1∑
N n=1q
n,ℓg
ℓ(s
n− c
ℓ) + λ ∥y − As∥
22(16)
に拡張する.これにより,各シンボルs
nに異なる重みq
n,ℓを 用いることができるようになる.SCSR
最適化の場合と同様に,ADMM
に基づくアルゴリズムによって重み付きSCSR
最適化 問題の解に収束する点列が得られる.提案手法の
IW-SCSR
では,重み付きSCSR
最適化(16)
と パラメータq
n,ℓの更新を繰り返し行う.このような繰り返し を用いるアプローチでは,一つ前の繰り返しで得られた推定値ˆ
x
pre= [ˆ x
pre1· · · x ˆ
preN]
Tを用いてq
n,ℓを更新することができる.本稿では
q
n,ℓ= d
−n,ℓ1∑
Lℓ′=1
d
−n,ℓ1′(17)
を用いて更新を行う.ただし,d
n,ℓ= |ˆ x
pren− c
ℓ|
である.d
n,ℓが小さい場合は対応する
q
n,ℓが大きくなるため,x
nの推定値 がc
ℓに近い値をとりやすくなる.Algorithm 2
に,IW-SCSR
のアルゴリズムを示す.Algorithm 2
では,重み付きSCSR
最 適化のパラメータλ
を,ある固定パラメータβ
に対してE [∑
L ℓ=1∑
Nn=1
q
n,ℓg
ℓ(x
n− c
ℓ) ] E [
λ ∥ y − Ax ∥
22] = β (18)
が成り立つように選ぶ.これにより,観測雑音の大きさに対し て適応的にλ
を選択することが可能になる.4.
シミュレーション結果計算機シミュレーションにより提案手法の特性を評価する.
雑音ベクトル
v
の成分はi.i.d.
で平均0
,分散σ
v2の円対称な 複素ガウス分布に従うとする.IW-SCSR
のパラメータρ
はρ = 0.1
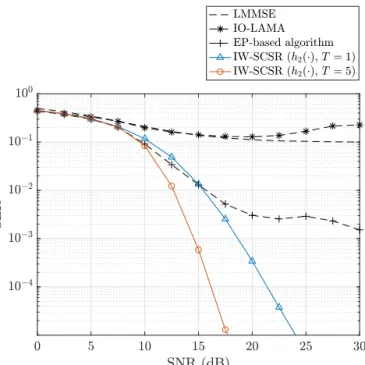
とする.4. 1 MIMO
信号検出図
3
はMIMO
信号検出におけるSER
特性を示す.送受信 アンテナ数は(N, M) = (50, 48)
で与えられ,[10]
と同様に,Algorithm 2 IW-SCSR Input: y ∈ C
M, A ∈ C
M×NOutput: x ˆ ∈ C
N1:
Initialize q
n,ℓ(n = 1, . . . , N and ℓ = 1, . . . , L).
2:
for t = 1 to T do
3:
Fix β > 0, ρ > 0, z
0∈ C
LN, and w
0∈ C
LN 4:λ =
∑
Lℓ′=1
p
ℓ′∑
L ℓ=1∑
Nn=1
q
n,ℓg
ℓ(c
ℓ′− c
ℓ) βM σ
2v5:
for k = 0 to K − 1 do
6:s
k+1= (
ρLI
N+ λA
HA )
−17:
· (
ρ ∑
L ℓ=1( z
kℓ− w
ℓk)
+ λA
Hy )
8:z
k+1n,ℓ= prox
qn,ℓ2ρ gℓ
(
s
k+1n+ w
kn,ℓ)
9:
(n = 1, . . . , N and ℓ = 1, . . . , L)
10:w
ℓk+1= w
kℓ+ s
k+1− z
k+1ℓ(ℓ = 1, . . . , L)
11:end for
12:
d
n,ℓ= s
Kn− c
ℓ(n = 1, . . . , N and ℓ = 1, . . . , L)
13:q
n,ℓ=
d−1
∑L n,ℓ
ℓ′=1d−1n,ℓ′
(n = 1, . . . , N and ℓ = 1, . . . , L)
14:end for
15:
x ˆ = s
K図
3
相関のあるMIMO
通信におけるSER
特性(8PSK, (N, M) = (50, 48), β = 15)
送受信側双方で半波長間隔の等間隔リニアアレーを用いる とする.変調方式は
8PSK
(Phase Shift Keying
)を仮定し,C = {
e
j(ℓ−1)π/4| ℓ = 1, . . . , 8 }
であるとする.この場合
C
の 要素の実部と虚部は独立ではなく,実数領域のSOAV
最適化 ではその依存性を考慮することができない.‘LMMSE’
は線形 のMMSE
法,‘IO-LAMA’
は近似メッセージ伝播法に基づく 手法[16]
,‘EP-based algorithm’
は期待値伝播法に基づく手 法[18]
を表す.‘IW-SCSR’
が提案手法であり,T
はパラメー タの更新回数を表す.‘IW-SCSR (h
1( · ))’
はスパース正則化の図
4
相関のあるMIMO
通信におけるSER
特性(C = {0,1 + j, −1 + j, − 1 − j, 1 − j } , (N, M) = (50, 30), ∥ x ∥
0= 10, β = 10)
関数
g
ℓ(·)
をg
ℓ(·) = h
1(·)
(ℓ = 1, . . . , 8
)としたものであり,‘IW-SCSR (h
2( · ))’
はg
ℓ( · ) = h
2( · )
(ℓ = 1, . . . , 8
)としたもの である.パラメータq
n,ℓはq
n,ℓ= 1/8
と初期化し,λ
はβ = 15
により定めた.パラメータの更新と重み付きSCSR
最適化を繰 り返すことで大きく特性が改善され,T = 5
の場合にはSNR
(
Signal-to-Noise Ratio
)が高い領域で従来の手法よりも良い 特性を達成可能であることがわかる.図
4
は,送信アンテナ数N = 50
,受信アンテナ数M = 30
の相関のあるMIMO
通信におけるSER
特性を示す.また,c
1= 0, c
2= 1 + j, c
3= −1 + j, c
4= −1 − j, c
5= 1 − j
と する.未知ベクトルx
は∥x∥
0= 10
を満たし,その非零成 分は1 + j, − 1 + j, − 1 − j, 1 − j
のいずれかの値をランダム にとるとする.IW-SCSR
のパラメータはq
n,1= 0.8
およびq
n,2= · · · = q
n,5= 0.05
と初期化し,スパース正則化の関数g
ℓ(·)
はg
1(·) = h
1(·)
およびg
ℓ(·) = h
2(·)
(ℓ = 2, . . . , 5
)とす る.パラメータλ
はβ = 10
により定める.‘ℓ
1’
はスパース性 のみを用いるℓ
1最適化を表す.この場合も,T = 5
の場合に はSNR
が高い領域で従来の手法よりも良い特性を達成可能で あることがわかる.4. 2
通信路等化図
5
および図6
は,通信路等化[29–31]
におけるSER
特性 を示す. 図5
では変調方式としてQPSK
(Quadrature Phase Shift Keying
)を仮定し,C = { 1 + j, − 1 + j, − 1 − j, 1 − j }
と した.パス数はL
p= 5
,ブロック長はQ = 32
とし,ブロッ ク間干渉の除去のためサイクリックプレフィックスを用いるも のとする.送受信アンテナ数は(N
t, N
r) = (4, 3)
で与えられ,各アンテナ間のインパルス応答
{ γ
n(i)r,nt}
(i = 0, . . . , L
p)はi.i.d.
で平均0
,分散1
の円対称な複素ガウス分布に従うとす図
5
通信路等化におけるSER
特性(QPSK, (N, M) = (128,96), (N
t, N
r) = (4,3), L
p= 5, Q = 32, β = 15)
図
6
通信路等化におけるSER
特性(8PSK, (N, M) = (64, 64), (N
t, N
r) = (2,2), L
p= 5, Q = 32, β = 15)
る.
SNR
は(L
pN
t/N )E [
∥ x ∥
22] /σ
2vで定義する.IW-SCSR
で 用いる正則化関数はg
ℓ(·) = h
2(·)
(ℓ = 1, . . . , 4
)とした.パラ メータq
ℓはq
n,ℓ= 1/4
と初期化し,λ
はβ = 15
により定めた.図
6
は(N
t, N
r) = (2, 2)
で8PSK
を用いた場合のSER
特性で ある.IW-SCSR
における正則化関数やパラメータは図3
と同 じものを用いた.図5
および図6
から,提案手法のIW-SCSR
が従来の手法に比べて良い特性を達成することがわかる.近似 メッセージ伝播法や期待値伝播法に基づく手法で良い特性を得られていないのは,観測行列がブロック巡回行列
[31]
の構造を もっているためであると考えられる.5.
ま と め本項では,劣線形観測から複素離散値ベクトルの再構成を行 う
SCSR
最適化問題を提案した.SCSR
最適化では,スパース 正則化項の和を複素離散値ベクトルのための正則化項として用 いる.また,SCSR
最適化を重み付きSCSR
最適化に拡張し,重み付き
SCSR
最適化とその目的関数のパラメータの更新を繰 り返し行うIW-SCSR
を提案した.計算機シミュレーションに より,MIMO
信号検出や通信路等化においてIW-SCSR
が従 来の手法よりも良い特性を達成可能であることを示した.今後 の課題としては,提案手法の特性の理論解析や,λ
やq
n,ℓなど のパラメータの影響の調査などが挙げられる.謝辞 本研究の一部は,科学研究費補助金(研究課題番号
18K04148, 18H03765, 17J07055
)及び,総務省の電波資源拡 大のための研究開発における委託研究課題「IoT
機器増大に対 応した有無線最適制御型電波有効利用基盤技術の研究開発」に よるものです.文 献