社団法人 電子情報通信学会
THE INSTITUTE OF ELECTRONICS,
INFORMATION AND COMMUNICATION ENGINEERS
信学技報
TECHNICAL REPORT OF IEICE.
[ポスター講演]非凸最適化に基づく離散値ベクトル再構成アルゴリズム
早川 諒
†
林 和則††
†
京都大学大学院情報学研究科 〒606-8501
京都市左京区吉田本町††
大阪市立大学大学院工学研究科 〒558-8585
大阪市住吉区杉本3-3-138 E-mail: [email protected], [email protected]
あらまし 本稿では,成分が離散値をとるベクトルをその線形観測から再構成する問題に対して,非凸最適化に基づ くアルゴリズムを提案する.まず,一般のスパース正則化項の重み付き和を離散値ベクトルに対する正則化として用い る
SSR
(Sum of Sparse Regularizers
)最適化問題を提案し,ADMM
(Alternating Direction Method of Multiplier
, 交互方向乗数法)と主・双対近接分離法に基づくアルゴリズムをそれぞれ導出する.さらに,ADMMに基づくアルゴ リズムを複素離散値ベクトルの再構成に拡張する.計算機シミュレーションにより,凸最適化に基づく手法よりも非 凸最適化に基づく手法の方が良い特性を達成可能であることを示す.キーワード 離散値ベクトル再構成,非凸最適化,ADMM,主・双対近接分離法
[Poster Presentation] Nonconvex Optimization Based Algorithm for Discrete-Valued Vector Reconstruction
Ryo HAYAKAWA † and Kazunori HAYASHI ††
† Graduate School of Informatics, Kyoto University, Yoshida-Honmachi, Sakyo-ku, Kyoto, 606-8501 Japan
†† Graduate School of Engineering, Osaka City University, 3-3-138 Sugimoto, Sumiyoshi-ku, Osaka, 558-8585 Japan
E-mail: [email protected], [email protected]
Abstract In this paper, we propose a possibly nonconvex optimization problem to reconstruct a discrete-valued vector from its underdetermined linear measurements. The proposed sum of sparse regularizers (SSR) optimization uses the sum of sparse regularizers as a regularizer for the discrete-valued vector. We also propose two proximal splitting algorithms for the SSR optimization problem on the basis of alternating direction method of multipliers (ADMM) and primal-dual splitting. Moreover, we extend the ADMM based approach for the reconstruction of complex discrete-valued vectors. Simulation results show that the proposed algorithms with nonconvex regularizers can achieve good reconstruction performance.
Key words Discrete-valued vector reconstruction, nonconvex optimization, ADMM (Alternating Direction Method of Multipliers), primal-dual splitting.
1.
ま え が き離散値をとるベクトルをその線形観測から再構成する問題は,
通信システムにおいてよく現れる.例えば,
MIMO
(Multiple- Input Multiple-Output
)信号検出[1–3]
やマルチユーザ検出[4]
などが例として挙げられる.特に観測の数が未知変数の数より も少ない劣決定系の問題においては,低演算量な線形の再構成 手法の特性は大きく劣化する.網羅的な探索を行う最尤推定に 基づく手法は良い特性を達成可能であるが,大規模な問題に対 しては計算量が膨大になり現実的ではない.少ない計算量で比
較的良好な特性を達成するための手法として,未知変数の離散 性を利用したメッセージ伝播法
[5–7]
に基づくアプローチが提 案されているが,これらの手法は観測行列に関する仮定が必要 であり,その仮定が満たされない場合,特性が大きく劣化する ことがある.他のアプローチとしては,離散性を活用した正則 化を用いる数理最適化に基づく手法[8–10]
が提案されている.しかしながら,これらの手法は凸緩和の結果得られる凸最適化 問題を解くものであり,離散性を十分に活用できているとは言 い難い.
本稿では,観測行列に関する陽な仮定をせずに凸最適化に基
— 1 —
一般社団法人 電子情報通信学会 信学技報
THE INSTITUTE OF ELECTRONICS,
INFORMATION AND COMMUNICATION ENGINEERS
This article is a technical report without peer review, and its polished and/or extended version may be published elsewhere.
IEICE Technical Report
WBS2019-24,ITS2019-15,RCC2019-55(2019-11)
- 11 -
づく手法より良い特性を達成することを目的として,非凸最適 化に基づく手法を提案する.提案最適化問題の
SSR
(Sum of Sparse Regularizers
)最適化では,未知ベクトルの離散性を活 用するため,一般のスパース正則化関数[11, 12]
の和を離散値 ベクトルに対する正則化として用いる.SSR
最適化はSOAV
(
Sum of Absolute Values
)最適化[10, 13–17]
の一般化となっ ており,スパース正則化としてℓ
1ノルムを用いた場合,SOAV
最適化と等価になる.SSR
最適化では,ℓ
1ノルム以外にも,ℓ
pノルム(
0 < p < 1
)[18–22]
,ℓ
0ノルム,ℓ
1− ℓ
2差分[23, 24]
などの非凸なスパース正則化関数を用いることができる.本稿 では,
SSR
最適化問題に対するアルゴリズムとして,ADMM
(
Alternating Direction Method of Multiplier
,交互方向乗数 法)[25–28]
に基づくアルゴリズムを提案する.ADMM
に基 づくアルゴリズムは最適解の近くへの収束が比較的速いこと が知られているが,逆行列計算を必要とするため,大規模な 問題においては計算量が膨大になる場合がある.この問題を 解決するため,逆行列計算を必要としない主・双対近接分離法(
Primal-Dual Splitting
)[29, 30]
に基づくアルゴリズムも提案 する.さらに,SSR
最適化問題を複素数領域における最適化問 題に拡張し,通信の分野でよく現れる複素離散値ベクトル再構 成のためのアルゴリズムを導出する.計算機シミュレーション により,非凸な正則化を用いた提案アルゴリズムが従来の手法 よりも良い特性を達成することを示す.本稿では,以下の記法を用いる.
R
は実数全体の集合を表し,C
は複素数全体の集合を表す.( · )
Tは転置,( · )
Hはエルミート 転置,j
は虚数単位,I
NはN × N
の単位行列,1
は成分が すべて1
のベクトル,0
は成分がすべて0
のベクトルである.Re{·}
とIm{·}
はそれぞれ実部と虚部を表す.下半連続な関数ϕ : K
N→ R ∪ {∞}
(K = R
またはC
)に対して,その近接写 像をprox
ϕ(u) = arg min
s∈KN{
ϕ(s) + 1
2 ∥ s − u ∥
22}
と定義 する.2.
離散値ベクトル再構成成分が離散値をとるベクトル
x = [x
1· · · x
N]
T∈ R
N⊂ R
N をその線形観測y = Ax + v ∈ R
M から再構成する問題を考え る.ここで,R = { r
1, . . . , r
L}
は未知ベクトルx
の成分がと りうる値の集合であり,L ≪ N
と仮定する.x
nの分布は既知 であるとし,それをPr (x
n= r
ℓ) = p
ℓ(ℓ = 1, . . . , L
)とおく(
∑
Lℓ=1
p
ℓ= 1
).A ∈ R
M×N は観測行列であり,v ∈ R
M は 加法性の雑音ベクトルである.3.
提案最適化問題未知ベクトル
x
をy
とA
から再構成するための最適化問題 として,SSR
最適化問題minimize
s∈RN
{
L∑
ℓ=1
q
ℓh
ℓ(s − r
ℓ1) + λ
2 ∥ y − As ∥
22} (1)
を提案する.ここで,
q
ℓとλ
(> 0
)はパラメータであり,∑
Lℓ=1
q
ℓ= 1
(q
ℓ> = 0
)であるとする.関数h
ℓ( · )
はスパース正 則化のための関数であり,その近接写像が効率的に計算可能であると仮定する.
SOAV
最適化[10]
の場合と同様に,SSR
最 適化に含まれるスパース正則化の関数は,x − r
ℓ1
がいくつか 零成分をもつという事実に基づいている.そのため,スパース 正則化関数の和∑
Lℓ=1
q
ℓh
ℓ(s − r
ℓ1)
は,離散値ベクトルに対 する正則化として捉えられる.スパース正則化関数
h
ℓ( · )
の例とその近接写像を示す.例
1 (ℓ
1ノルム).
ℓ
1 ノ ル ム に 基 づ く 正 則 化h
(1)(u) = ∥u∥
1= ∑
N n=1|u
n|
(
u = [u
1· · · u
N]
T∈ R
N)の近接写像prox
γh(1)( · )
は[ prox
γh(1)(u) ]
n
= sign(u
n) max (|u
n| − γ, 0) (2)
で与えられる(γ > 0
).ここで,[·]
nはベクトルのn
番目の成 分を表し,sign(·)
は符号関数を表す.ℓ
1正則化を用いたSSR
最適化は,SOAV
最適化[10]
と等価になる.例
2 (ℓ
0ノルム).
ℓ
0ノルム(非零成分の数)に基づく非凸な正則化h
(0)(u) = ∥ u ∥
0に対しては,
[ prox
γh(0)(u) ]
n
=
{ 0 } (
| u
n| < √ 2γ ) {0, u
n} (
|u
n| = √ 2γ ) {u
n} (
|u
n| > √ 2γ )
(3)
となる(
n = 1, . . . , N
).例
3 (ℓ
pノルム(0 < p < 1
)).
ℓ
pノルム(0 < p < 1
)に基づく正則化h
(p)(u) = ∥ u ∥
pp=
∑
Nn=1
|u
n|
pを考える.図1
に,二値ベクトルの場合(R = {−1, 1}
)に対する正則化関数(h
(p)(s + 1) + h
(p)(s − 1))/2
を 示す.図から,h
(1/2)( · )
やh
(2/3)( · )
を用いた非凸な正則化関数 はs = ± 1
のみで最小となるため,h
(1)( · )
を用いた凸な正則化 関数に比べてより離散性を促進できることがわかる.ℓ
pノルム に対する近接写像に関しては,[19–21]
で検討されている.任 意のp ∈ (0, 1)
に対してprox
γh(p)(·)
を数値的に計算可能であ り,p = 1/2, 2/3
に対しては閉形式で書くことができる.図2
はγh
(1)( · )
,γh
(2/3)( · )
,γh
(1/2)( · )
,およびγh
(0)( · )
(γ = 0.5
) の近接写像を示したものである. 非凸な正則化関数に対する近 接写像は不連続となることがわかる.例
4 (ℓ
1− ℓ
2差分).
ℓ
1ノルムとℓ
2ノルムの差分を用いた非凸な正則化h
(1−2)(u) =
∥ u ∥
1−∥ u ∥
2が圧縮センシングに対して提案されている[23,24]
.h
(1−2)( · )
の近接写像は,[24]
のLemma 1
や[31]
のProposi- tion 7.1
を用いて計算可能である.4. SSR
最適化のためのアルゴリズム本節では,
SSR
最適化問題に対するアルゴリズムを2
つ提案 する.4. 1 ADMM
に基づくアルゴリズムADMM
に基づくアルゴリズムを導出するため,SSR
最適化図
1 (h(s + 1) + h(s − 1))/2
図
2 prox
γh(u) (γ = 0.5)
(1)
を新たな変数z
1, . . . , z
L∈ R
Nを用いてminimize
s,z1,...,zL∈RN
{
L∑
ℓ=1
q
ℓh
ℓ(z
ℓ− r
ℓ1) + λ
2 ∥y − As∥
22}
subject to s = z
ℓ(ℓ = 1, . . . , L) (4)
と 書 き 換 え る .さ ら に ,
z = [
z
1T· · · z
LT]
T∈ R
LN,Φ = [I
N· · · I
N]
T,f(s) =
λ2∥y − As∥
22,およびg(z) =
∑
Lℓ=1
q
ℓh
ℓ(z
ℓ− r
ℓ1)
とおくと,ADMM
の標準形minimize
s∈RN,z∈RLN
{ f(s) + g(z) } subject to Φs = z (5)
に変形できる.ADMM
に基づく提案アルゴリズムを導出する.最適化問題(5)
に対するADMM
の更新式はs
k+1= arg min
s∈CN
{
f (s) + ρ 2
Φs − z
k+ w
k2
2
} , (6)
z
k+1= arg min
z∈CLN
{
g (z) + ρ 2
Φs
k+1− z + w
k2
2
} ,
(7)
w
k+1= w
k+ Φs
k+1− z
k+1(8)
Algorithm 1 ADMM-SSR: ADMM Based Algorithm for (1) Input: y ∈ R
M, A ∈ R
M×NOutput: x ˆ ∈ R
N1: Fix ρ > 0, z
0∈ R
N L, and w
0∈ R
N L2: for k = 0 to K − 1 do
3: s
k+1= (
ρLI
N+ λA
TA )
−1· ( ρ ∑
Lℓ=1
( z
ℓk− w
kℓ)
+ λA
Ty ) 4: z
k+1ℓ= r
ℓ1 + prox
qℓρhℓ
( s
k+1+ w
ℓk− r
ℓ1 ) (ℓ = 1, . . . , L) 5: w
ℓk+1= w
kℓ+ s
k+1− z
k+1ℓ(ℓ = 1, . . . , L) 6: end for
7: x ˆ = Q (s
K)
となる.
k
は繰り返しのインデックス,ρ
(> 0
)はパラメータであ り,w
k∈ R
LNである.∂
∂s
T{
f(s) + ρ
2 Φs − z
k+ w
k22
}
= 0
を解くと,s
kの更新式(6)
はs
k+1= (
ρLI
N+ λA
TA )
−1(
ρ
∑
L ℓ=1( z
ℓk− w
kℓ)
+ λA
Ty )
(9)
と 書 け る .こ こ で ,
z
kℓ∈ R
N お よ びw
kℓ∈ R
N(ℓ = 1, . . . , L
)は そ れ ぞ れz
k=
[
z
1kT· · · z
kLT]
Tお よ び
w
k= [
w
k1T· · · w
kLT]
Tの部分ベクトルである.
z
kの更新式(7)
は,関数
g( · )
がg (z) = ∑
Lℓ=1
q
ℓh
ℓ(z
ℓ− r
ℓ1)
のように分離できる ことを利用するとz
k+1= prox
1 ρg(
Φs
k+1+ w
k)
(10)
=
r
11 + prox
q1 ρh1( s
k+1+ w
k1− r
11 ) . .
. r
L1 + prox
qLρ hL
( s
k+1+ w
kL− r
L1 )
(11)
と書ける.式
(11)
の変形では,平行移動に関する近接写像の 性質[27]
を用いた.ADMM
に基づく提案アルゴリズムのADMM-SSR
をAl- gorithm 1
に示す.Q(·)
は,入力ベクトルの各成分を最も近 いR
の要素に写像する操作を表す.ADMM-SSR
は正則化項∑
Lℓ=1
q
ℓh
ℓ(s − r
ℓ1)
全体の近接写像の計算を必要としないた め,例1–4
の正則化関数のようにh
ℓ( · )
の近接写像が計算可能 であればよい.アルゴリズム中で逆行列(
ρLI
N+ λA
TA )
−1の 計算を一度行う必要があるため,計算量はO(N
3) [32, Ch. 11]
となる.
4. 2
主・双対近接分離法に基づくアルゴリズム前項で述べたように,
ADMM-SSR
は逆行列計算を必要とす るため,非常に大規模な問題においては計算量が膨大となる場 合がある.そこで,本項では逆行列計算を必要としない主・双 対近接分離法[30]
に基づくアルゴリズムを提案する.まず,
SSR
最適化問題(1)
をminimize
s∈RN
{ f(s) + g(Φs) } (12)
と書き換える.最適化問題(12)
に対する主・双対近接分離法のAlgorithm 2 PDS-SSR: PDS Based Algorithm for (1) Input: y ∈ R
M, A ∈ R
M×NOutput: x ˆ ∈ R
N1: Fix ρ
1> 0, ρ
2> 0, s
0∈ R
N, and w
0∈ R
N L2: for k = 0 to K − 1 do
3: s
k+1= s
k− ρ
1( λA
T(
As
k− y ) + ∑
Lℓ=1
w
kℓ) 4: z
k+1ℓ= w
ℓk+ ρ
2( 2s
k+1− s
k)
(ℓ = 1, . . . , L)
5: w
ℓk+1= z
ℓk+1− ρ
2(
r
ℓ1 + prox
qℓ ρ2hℓ(
zk+1ℓ ρ2− r
ℓ1
))
(ℓ = 1, . . . , L) 6: end for
7: x ˆ = Q (s
K)
更新式は
s
k+1= s
k− ρ
1( ∇f ( s
k)
+ Φ
Tw
k)
, (13)
z
k+1= w
k+ ρ
2Φ (
2s
k+1− s
k)
, (14)
w
k+1= prox
ρ2g∗( z
k+1)
(15)
となる.ここで,
ρ
1, ρ
2(> 0
)はパラメータであり,∇ f ( · )
はf( · )
の 勾 配 ,g
∗( · )
はg( · )
の 共 役 関 数 を 表 す.∇ f(s) = λA
T(As − y)
であるから,s
kの更新式(13)
はs
k+1= s
k− ρ
1( λA
T(
As
k− y )
+
∑
L ℓ=1w
kℓ)
(16)
となる.また,式
(15)
のprox
ρ2g∗( · )
はprox
ρ2g∗(u) = u − ρ
2prox
g/ρ2(u/ρ
2)
と書けるため,式(11)
と式(15)
を用いる と,w
ℓk+1の更新式はw
ℓk+1= z
k+1ℓ− ρ
2(
r
ℓ1 + prox
qℓ ρ2hℓ( z
k+1ℓρ
2− r
ℓ1 ))
(17)
と書ける.
Algorithm 2
に,主・双対近接分離法に基づく提案アルゴリズ ムであるPDS (Primal-Dual Splitting)-SSR
を示す.ADMM- SSR
と同様に,PDS-SSR
もh
ℓ(·)
の近接写像を用いて計算可 能である.PDS-SSR
は逆行列計算を必要とせず,その計算量 はO (M N )
となる.4. 3
提案アルゴリズムの収束性提案アルゴリズムの収束性はスパース正則化
h
ℓ( · )
の凸性に依 存する.h
1(·), . . . , h
L(·)
がすべて凸の場合は,SSR
最適化の目 的関数も凸になるため,ADMM
の収束性[26]
よりADMM-SSR
によって得られる系列{
s
k}
は最適解に収束する.また,
[30]
の
Theorem 3.1
を用いると, 1/ρ
1− ρ
2L > = λ A
TA
2
/2.
で あればPDS-SSR
によって得られる系列{
s
k}
も最適解に収束 することがわかる.しかし,
h
ℓ(·)
が非凸な場合,一般に最適解 への収束性は保証されない.いくつかの仮定をおいた上で非凸 な最適化問題に対する収束性が議論されている[33–37]
が,こ れらの結果を提案アルゴリズムに直接適用するのは困難である.5.
複素離散値ベクトル再構成への拡張本節では,前節の提案手法を複素離散値ベクトル
x ˜ ∈ C
N⊂
C
Nの再構成の問題に拡張する.ここで,C = {c
1, . . . , c
L}
は 未知ベクトルの各成分がとりうる複素数値の集合を表す.観測 ベクトルy ˜ ∈ C
M は,観測行列A ˜ ∈ C
M×Nと雑音ベクトル˜
v ∈ C
M を用いてy ˜ = ˜ A x ˜ + ˜ v
と表されるとする.複素離散値ベクトルの再構成のための最適化問題として,
SSR
最適化問題(1)
を拡張したSCSR
(Sum of Complex Sparse Regularizers
)minimize
˜ s∈CN
{
L∑
ℓ=1
q
ℓ˜ h
ℓ(˜ s − c
ℓ1) + λ y ˜ − A˜ ˜ s
22
} (18)
を提案する.関数
˜ h
ℓ( · )
は複素スパースベクトルに対する正則 化関数である.ℓ
1正則化を用いたSCSR
最適化は[38]
で提案 されているが,本稿ではh ˜
ℓ(·)
として非凸な正則化関数も考え る.[38]
で議論されているように,未知ベクトルの実部と虚部 が独立でない場合,複素数領域における最適化問題を用いるの が適切である.本稿では,二種類の正則化関数
˜ h
ℓ(·)
を考える.例えば,ℓ
pノルムに基づく正則化としては,˜ h
(p)⋆( ˜ u) = ∑
N n=1|˜ u
n|
p および˜ h
(p)⋆⋆( ˜ u) = ∑
Nn=1
( | Re { u ˜
n}|
p+ | Im { u ˜
n}|
p)
を定義する(
u ˜ = [˜ u
1· · · u ˜
N]
T∈ C
N).一つ目の正則化˜ h
(p)⋆( · )
は複素数 の絶対値に基づいており,二つ目の正則化˜ h
(p)⋆⋆( · )
は実部と虚部 を別々に取り扱う.同様にh
(1)⋆(·)
,h
(0)⋆(·)
,h
(1⋆−2)(·)
,h
(1)⋆⋆(·)
,h
(0)⋆⋆(·)
,およびh
(1⋆⋆−2)(·)
を定義する.γ ˜ h
⋆(·)
(˜ h
⋆(·) = ˜ h
(1)⋆(·)
,˜ h
(0)⋆( · )
,˜ h
(p)⋆( · )
,˜ h
(1−2)⋆( · )
)の近接写像は対応するγh( · )
(h( · ) = h
(1)( · )
,h
(0)( · )
,h
(p)( · )
,h
(1−2)( · )
)の近接写像を用いて書け る.実際,˜ h
⋆( · )
が˜ h
⋆( ˜ u) = h ( | u ˜ | )
(| u ˜ | = [ | u ˜
1| · · · | u ˜
N| ]
T) を満たすことを用いると,γ ˜ h
⋆(·)
の近接写像は[ prox
γ˜h⋆( ˜ u) ]
n
= [
prox
γh( | u ˜ | ) ]
n
˜ u
n| u ˜
n| (19)
と書ける.
γ ˜ h
⋆⋆(·)
の近接写像も対応するprox
γh(·)
の近接写像を 用いて書ける.具体的には,定義から˜ h
⋆⋆( ˜ u) = h (u
R) + h (u
I)
(
u
R= Re { u ˜ }
およびu
I= Im { u ˜ }
)が成り立つので,[ prox
γh˜⋆⋆( ˜ u) ]
n
= [
prox
γh(u
R) ]
n
+ j · [
prox
γh(u
I) ]
n
(20)
となる.
複素数領域の最適化問題に対する
ADMM [39]
の結果を利用 すると,SCSR
最適化問題(18)
に対するADMM
に基づくアル ゴリズムを導出可能である.結果として得られるアルゴリズム は,Algorithm 1
のR
,(·)
T,r
ℓ,およびprox
qℓρhℓ
(·)
をそれぞ れC
,(·)
H,c
ℓ,およびprox
qℓ2ρ˜hℓ
(·)
に置き換えたものとなる.6.
シミュレーション結果計算機シミュレーションにより,提案アルゴリズムの特性 を評価する.観測行列
A
の各成分はi.i.d.
(independent and
identically distributed
)で平均0
,分散1
のガウス分布に従う とする.また,雑音ベクトルの各成分はi.i.d.
で平均0
のガウ ス分布に従うとする.ADMM-SSR
とPDS-SSR
における初期 値はそれぞれz
0= w
0= 0
およびs
0= 0, w
0= 0
とする.図
3
二値ベクトルの再構成におけるシンボル誤り率((N, M ) = (200,160), SNR = 15 dB)
図
4
二値ベクトル再構成のシンボル誤り率((N, M) = (200, 150))
図
3
は,二値ベクトルの再構成におけるシンボル誤り率(
symbol error rate, SER
)を示している.ここで,(r
1, r
2) = ( − 1, 1)
および(p
1, p
2) = (1/2, 1/2)
である.問題のサイズは(N, M ) = (200, 160)
であり,信号対雑音比(signal-to-noise ra- tio, SNR
)は15 dB
とした.
提案アルゴリズムのパラメータはq
1= q
2= 1/2
,λ = 0.05
,ρ = 3
,ρ
1= 2/ (
λ A
TA
2
+ 4 )
, および
ρ
2= 1/2
とした.図3
では,‘ℓ
1’
,‘ℓ
2/3’
,‘ℓ
1/2’
,‘ℓ
0’
,お よび‘ℓ
1− ℓ
2’
がそれぞれスパース正則化としてℓ
1ノルム,ℓ
2/3 ノルム,ℓ
1/2ノルム,ℓ
0ノルム,ℓ
1− ℓ
2差分を用いた場合を 表す.凸なℓ
1正則化を用いた場合,ADMM-SSR
とPDS-SSR
が同じシンボル誤り率に収束していることがわかる.一方で,ℓ
pノルムやℓ
0ノルムなどの非凸な正則化を用いた場合,提案 アルゴリズムはより小さいシンボル誤り率を達成している.ま た,ADMM-SSR
とPDS-SSR
を比較すると,逆行列を用いるADMM-SSR
の方が収束が速いことがわかる.図
4
は,ADMM-SSR
のSNR
に対するシンボル誤り率を示 す.未知ベクトルの分布は図3
の場合と同じ((r
1, r
2) = (−1, 1)
および(p
1, p
2) = (1/2, 1/2)
)とし,問題のサイズは(N, M ) = (200, 150)
とした.比較のため,線形のMMSE
(Minimum
図
5
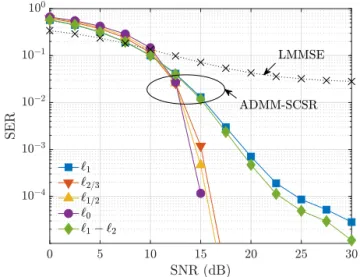
複 素 離 散 値 ベ ク ト ル 再 構 成 の シ ン ボ ル 誤 り 率((N, M ) = (200,160))
Mean-Square-Error
)を‘LMMSE’
,Box
制約を用いた手法[8]
を
‘Box’
で示している.ADMM-SSR
のパラメータはλ = 0.05
,ρ = 3
,およびK = 300
とした.非凸な正則化を用いたADMM- SSR
が,凸なℓ
1正則化を用いた場合やBox
制約を用いた手法 よりも良い特性を達成していることがわかる.図
5
は,複素離散値ベクトルの再構成に対するシンボル誤り率 特性を示す.問題のサイズは(N, M ) = (200, 160)
とし,未知ベ クトルの分布は(c
1, c
2, c
3, c
4, c
5) = (0, 1+j, −1+j, −1−j, 1−j)
および(p
1, p
2, p
3, p
4, p
5) = (0.6, 0.1, 0.1, 0.1, 0.1)
とした.こ こで,p
ℓ= Pr(x
n= c
ℓ)
(ℓ = 1, . . . , 5
)である.この場合未知 変数は実部と虚部が同時に0
になるため,スパース正則化の関 数としては˜ h
1(·) = ˜ h
⋆(·)
および˜ h
ℓ(·) = ˜ h
⋆⋆(·)
(ℓ = 2, . . . , 5
) を用いた.提案アルゴリズムのADMM-SCSR
のパラメータはq
ℓ= p
ℓ,λ = 0.05
,ρ = 3
,およびK = 300
とした.図から,複素離散値ベクトルの再構成においても非凸な正則化を用いた 提案アルゴリズムが良い特性を達成することがわかる.
7.
ま と め本稿では,離散値ベクトル再構成のための非凸最適化に基づ くアルゴリズムを提案した.提案手法では,スパース正則化関 数の和を離散値ベクトルに対する正則化として用いる.計算機 シミュレーションにより,非凸な正則化を用いた提案手法が従 来の凸最適化に基づく手法より良い特性を達成可能であること を示した.
謝辞 本研究の一部は,科学研究費補助金(研究課題番号
18K04148, 18H03765, 17J07055
)及び,総務省の電波資源拡 大のための研究開発における委託研究課題「IoT
機器増大に対 応した有無線最適制御型電波有効利用基盤技術の研究開発」に よるものです.文 献