505 計測 自動制御学会論文集 Vol.23, No.5 (昭和62年5月)
単 一 イ ンバ ー タ を 用 い た 複 数 誘 導 電 動 機 制 御 の
無 人 車 走 行 へ の 応 用 †
隈 元
昭*・平 根 喜 久*
An Application
of Multiple
Induction
Motor Control
with a Single Inverter
to an Unmanned
Vehicle Propulsion
Akira KUMAMOTO*
and Yoshihisa HIRANE*
This paper is concerned with a new scheme
of independent
control of two induction
mo-tors which are connected in parallel to a single
inverter.
This method is developed as an AC
motor alternative
of a currently-used
DC
mo-tor propulsion system for an unmanned ground
carrier vehicle, which is equipped with a pair
of identical motor-wheel
driving mechanisms
at right and left sides of the body. This type
of the ground vehicle, named as a Powered
Wheel Steering (PWS) Vehicle, because it can
be steered
by appropriately
controlling
the
speed difference of each motor together with
attaining the propulsion force by adjusting the
average speed of the two motors, is playing
an important role in the recent factory
automa-tion as a flexible carrier vehicle.
The paper firstly investigates
the required
basic running functions of a PWS vehicle and
the proposed hardware
to realize these
func-tions is described.
Followed
with the above
discussions,
the
speed
control
strategy
to
achieve the independent
control of the two
motors, under the limitation
of the proposed
single inverter
utilization,
is presented.
The
closed loop speed control program of motors is
developed based on this control strategy.
The
experimental
run of the test vehicle, with the
specification which is almost the same as a
cur-rently-adopted
100kg load-weight
carrier
ve-hicle, is executed to examine the effectiveness
of the proposed propulsion method.
The
results,
obtained
for
three
running
functions for a straight course, a curved course with a fixed radius of rotation and a spin-turn which is defined as a turn of the vehicle arround the tread center, indicate that the pre-sented method of induction motor propulsion assures a satisfactory operation for the vehicle control.
Furthermore, a self-sustained steering con-trol, where the vehicle itself estimates the pre-sent position and generates the steering com-mand so that the vehicle follows the pre-deter-mined course on the floor, is tried for the straight course running. The result demon-strates the possibility that the vehicle will be well controlled under the presence of the guid-ance commands.
Key Words: vehicle, inverter, induction motor, motor control 1. ま え が き 工 場 内 に あ って 各 種 素 材 ・工 具 ・製 品 な ど を運 搬 す る無 人 搬 送 車(以 下 無 人 車 とい う)は 最 近 のFA化 に お い て 重 要 な 役 割 を 担 って い る.無 人 車 の車 体 構 造 に は多 くの方 式 が あ るが,よ く用 い られ て い る もの は, 前 輪 で 操 舵 し後 輪 で 駆 動 す る方 式 と車 体 中央 部 の両 側 面 に 一 対 の 電 動 機 ・車 輪 よ りな る走 行 駆 動 系 を 独 立 に 設 置 す る左 右 独 立 輪 駆 動方 式 に大 別 さ れ る1),2).前 者 に比 べ て後 者 の 方式 は構 造 的 に前 後 対 称 とな る た め, 最小 回 転半 径 が小 さ く,前 進 ・後 進 時 の 走行 軌跡 を 同 一 とで きる な ど の 利 点 が あ り,小 形 無 人 車 で 賞 用 さ れ て い る.こ の 方 式 の 無 人車 は,駆 動 ・操 舵 の 両 機能 を 左 右 車 輪 の平 均 回転 数 お よ び 回転 数 差 の 制 御 に よ って いる こ とか らPWS (Powered Wheel Steering)車 と も呼 ば れて い る1).
PWS無 人 車 に 限 らず 一 般 に無 人 車 の 走行 用 電動 機 † International Conference of IECON '84で 発 表
(昭 59・10)
* 関 西 大 学 工 学 部 吹 田 市 山 手 町3-3-35 * Faculty of Engineering
, Kansai University, Suita (Received February 12, 1986)
506 昭和62年5月 計 測 自動制 御 学 会 論 文 集 第23巻 第5号 に は 制 御 性 に優 れた 直 流 電 動 機 が 現 在 採 用 さ れ て い る.し か し,直 流電 動 機 は 高 価 で あ り,周 知 のよ うに ブ ラ シ の定 期 的交 換 を 必要 とす る な ど 保 守 性 の悪 い欠 点を 有 す る た め,堅 牢 ・低 価 格 で保 守 性 の よ い誘 導 電 動 機 の 利 用 が望 まれ て い る.誘 導 電 動 機 をPWS無 人 車 に 適 用 す る に 際 して は,左 右 の 電 動 機 を 別 々 に2台 の イ ンバ ー タ で個 別 に独 立 制 御す れ ば 総合 的 な制 御性 は 向 上 す る が,同 一 の複 数 台 イ ンバ ー タ を 必 要 と し, 価格 ・設 置場 所 の空 間 利用 な ど の面 で 不 利 と な る.ま た,イ ンバ ー タを 構 成す る比 較的 信 頼 性 の 低 い電 力用 ス イ ッチ ング素 子 の 必要 個 数 が増 加 し,保 守 性 も低下 す る. こ れ らの観 点 か ら,本 研 究 で は誘 導 電 動 機 を 用 い た PWS無 人 車 の 一制 御 法 と して,必 要 最小 限 の電 力変 換 回 路 によ る単 一 イ ンバ ー タ を用 い た 複 数 誘 導 電 動機 の制 御 方式 を提 案 す る も の で あ る3)∼6).本方 式 で は, 左 右 の 誘導 電 動 機 は基本 的 に は 単 一 の イ ンバ ータ に 並 列 接 続 さ れ,各 電 動 機 の入 力 三相 の う ち の 一 相 に トラ ィ ア ック を挿 入 して これ を位 相 制 御 す る こ とで, 走 行 用 の両 電 動 機 を 制 御 す る.こ こ に 提 案 す る方 式 は,両 電動 機 の駆 動 用主 回路 構 成 が きわ め て 簡 単 で あ り,価 格 ・空 間 利 用 ・保 守 の面 で有 利 な シス テ ム とな る. 以 下,本 文 で は,PWS無 人 車 に望 ま れ る走 行 機能 につ い て述 べ,こ れ を実 現 す る提 案 の ハ ー ドウ ェア の 概 要 を 述べ る.ま た,本 研 究 で用 い た 単 一 イ ンバ ータ 方 式 で は,電 動 機 駆 動 回路 の簡 単 化 に よ って 制 御 の 自 由度 が い くぶ ん 低 下 す るた め,電 動 機 の 速 度 制 御 が線 形 制 御 と な らず 多 少 制約 さ れ る が,速 度 制 御 プ ログ ラ ムの くふ う に よ って 実用 上 十 分 な走 行 機 能 が 実 現 さ れ る こ と を試 作 車 の 走行 実 験 か ら明 らか に して い る. 2. 試 作PWS無 人 車 2.1 PWS無 人 車 と走 行 機 能 PWS無 人 車 の車 体 構 造 をFig. 1に 示 す.通 常, 車体 中 心 軸上 の 前 ・後 キ ャ ス タ は前 進 ・後 進 に応 じて い ず れ か 片方 が 用 い られ,車 体 両 側 面 の 左 右 車 輪 と と もに3点 支持 で車 体 を 支 え る.図 に示 す よ う に,PWS 無 人 車 は前 後 対 称構 造 で あ り,車 軸 中 心 点 を 旋 回中 心 と して 左 右車 輪 を互 い に逆 回 転 させ そ の 場 旋 回(以 下 ス ピ ンタ ー ン とい う)で き る.ま た,こ の 対 称 構 造 の た め に前 進 ・後 進 時 の走 行 軌 跡 を ほ ぼ 同 一 と で き,回 転半 径 も小 さ く,フ レキ シ ブ ル な走 行 経 路 の 設 定 が 可 能 で あ る. こ こで,無 人 車 の走 行 機 能 につ い て 考 え る.理 想 的 には 無 人 車 の 走 行 経 路 に い か な る制 限 も課 せ られ るべ
Fig. 1 Schematic construction of a PWS vehicle
きで はな いが,現 状 で は工 場 内 で利 用 され る無 人車 の 大 半 は平 面 床 を 走 行 し,電 磁 誘導 あ る い は光 学 誘 導 な どの 何 らか の 外 部 誘 導 手 段 によ って,定 め られ た 所定 の 経 路 を 追従 す る よ うに 誘 導 さ れ るの が 普通 で あ る. 設 定 経 路 と して は任 意 形 状 の 経路 が考 え られ る が,基 本 的 に は直 線 走 行 ・所 定 の回 転 半径 で 円 弧 状 に 旋 回 す る 曲線 走 行 に お け る経 路 追 従 性 と,PWS無 人 車 で は前 述 の ス ピ ンタ ー ン走 行 の3機 能 が 重 要 と考 え られ る.ま た,走 行 用 電 動 機 速 度 制 御系 へ の 操 舵指 令 の 与 え 方 に よ り,外 部 誘 導 方 式 の ほか,無 人 車 自体 で車 両 の 床 面 上 の 現 在 位 置 を 判 定 し自己操 舵 す る 自律 走行 方 式7)が あ る.後 者 の方 式 は 現在 研 究 段 階 に あ り,本 研 究 で は無 人車 は 基 本 的 に は外 部誘 導 され る こと を前 提 と し,与 え られ た操 舵 指 令値 す なわ ち両 電 動機 へ の 回 転 数 指 令 値 に対 す る無 人 車 の 走行 ・操 舵 機 能 に着 目 し て,主 と して 電 動 機 制 御 を 中心 に直 線 ・曲線 ・ス ピ ン タ ー ンの 各 走行 につ いて 検 討 した. 2.2 走 行 用 誘 導 電 動 機 の単 一 イ ンバ ー タ制 御 方 式 PWS無 人 車 の 左 右 の 誘 導 電 動機 を 制 御 す る た め の イ ンバ ータ 回 路 と して,本 研 究 で はFig. 2に 示 す 単 一 イ ンバ ー タ方 式 を 提 案 す る.こ こで,Esは 無人 車
Fig. 2 Main power circuit of an inverter system for two motors drive
隈 元 ・平 根:単 一 イ ンバ ー タ を用 いた 複 数 誘 導 電 動 機 制 御 の無 人 車 走 行 へ の応 用 507 塔 載 の蓄 電池,IMA・IMBは 車 体 左 右 に設 けた 誘 導 電 動 機 で あ り,両 電 動 機 を 単 一 の イ ンバ ー タ に並 列 接続 す る.し か しな が ら,イ ンバ ー タ1台 のみ で 複 数 の誘 導 電 動 機 を 独立 制 御 す る こ と は原 理 的 に不 可 能 で あ る か ら,必 要最 小 限 の 電 力 用 素 子 と して 図 の よ う に トラ イ ア ックTRA・TRBを 両 機 のW相 に それ ぞれ 挿 入 し て い る.こ れ よ り,電 動 機 速 度 制 御 時 の 操 作 量 は,イ ンバ ータ 周波 数fINV, TRAお よ びTRBの 位 相 制 御 角 αAお よ び αBと な る.な お ジ本 単 一 イ ンバ ータ方 式 の無 人車 へ の適 用 に先 立 ち,本 回路 の基 礎 特 性 を慣 性 負 荷 を 有 す る ベ ンチ テ ス トで検 討 した3)∼5). 2.3 試作 車 の仕 様 ベ ンチ テ ス トで の実 験 に続 い て,実 験 用PWS無 人 車 を 試 作 した.そ の 主 要 諸 元 をTable 1に 示 す. 本 車 両 は,PWS無 人 車 が一 般 に小 形 ・低 荷 重 の搬 送 用 に用 い られて い る こ と か ら,ほ ぼ100kgま で の搬 送 を前 提 とす る もので,車 両 の 走行 速 度 上 限値60m/ minは 現 用 無 人車 の仕 様 に 合 せ て い る.供 試 イ ン バ ー タ は簡 単 の た め に汎 用 のV/F一 定 制 御 され る も のを 用 い た.イ ンバ ータ 周 波 数 可 変 範 囲 は3∼80Hz で あ り,上 記 の速 度 上 限 値 を十 分 に カバ ー して い る. 試 作 車 は12V蓄 電 池 を4ユ そ ッ ト塔 載 して お り, タ ップ切 換 で12Vお き に最神適 と思 われ る電 池 電 圧 を 実 験 的 に選 定 し,36Vで 使 用 す る こ と に した.エ ン コーダ はゴ ム ロー ラを 介 して 車 輪 に接 触 し電 動 機 回転 数 を間 接 的 に計数 す る方 式 を 用 い て い る.な お,同 規 模 の現 用 無 人車 の 曲線 走 行 時 の最 小 回転 半 径 は ほぼ 0.6mで,回 転 速 度 は15m/minほ ど が標 準 仕 様 で あ
Table 1 Test vehicle specification
る2).後 章 の 曲線 走行 実 験 にお い て もこ れ らの 数値 を 参 考 と した. 3. 走 行 用 電 動 機 の 制 御 系 3.1 電 動 機 駆 動 回路 試 作 車 の 誘 導 電 動 機IMA・IMBの 駆 動 ・制 御 回路 をFig. 3に 示 す.図 で,Es,イ ンバ ータ,ト ラ イ ァ ッ クA∼D, IMA・IMB, TRA・TRBよ り な る部 分 は単 一 イ ンバ ー タ方 式 の誘 導電 動 機 駆 動 回 路 で あ る. Fig. 2の 原 理 図 と比 較 して 追加 したA∼Dの 素 子 は, イ ンバ ータ の 相 回 転 方 向 を順 方 向 と逆方 向 に瞬 時 に切 換 え る 目的 で 用 い た もので あ る.こ れ に よ り,2.2節 で 述 べ た 操 作 量 に イ ンバ ータ 出力 交 流 電 圧 の 相 回 転 方 向 が 追 加 され る.実 験 で 使用 した 汎 用 イ ン バ ー タ で は,電 動 機 を 逆 相 制 動 で 減速 す る に際 して 出 力 の 相 回 転 方 向 を 瞬 時 に切 換 え る ことが で きな い.こ の た め, 便 宜 的 に上 述 の手 法 を 用 い たが,イ ンバ ー タ を 構 成 す る トラ ンジ ス タ ア ーム の ベ ース信 号 の シ ー ケ ンス を直 接 変 更 す れ ば,こ こで 追加 したA∼Dの トライ ア ッ
508 昭 和62年5月 計 測 自動 制御 学会 論 文 集 第23巻 第5号 クは本 質 的 に不 要 で あ り,Fig. 3の 電 動 機 駆 動 回路 は先 の原 理 図 と同 じ構 成 とな る. 3.2 電 動 機速 度制 御 回 路 Fig. 3で 前 節 の 電動 機 駆 動 回路 以 外 の部 分 が 電 動機 制 御 回路 で あ る.本 回路 は汎 用8ビ ッ トCPUと イ ン タ フ ェー ス部 よ りな る.前 進 ・後 退 ・停止 な どの 走行 指 令 と電 動機 の 回 転数 指 令 値NRefA・NRefBに 基 づ き, タ イ マICを 用 い て エ ンコ ーダ パ ル ス を計 数 し電動 機 の 回転 数 偏 差 を得 る.こ れ よ り,次 章 で述 べ る速度 制 御 プ ロ グ ラ ムに よ って,位 相 制 御 角指 令 αA・αB,汎 用 イ ンバ ー タへ の 周波 数 指 令fINV Command,さ らに, イ ンバ ー タへ の 出 力相 回 転 方 向指 令F/R Command を 作 成 す る.イ ンタ フ ェ ー ス部 で は,イ ンバ ータ の 出 力 電 圧 に 同期 した信 号 を も と に,分 解 能1° の 位相 制 御 信 号 を 作 成す る.Forward/Reverse Controllerは イ ンバ ータ の 出力 周 期 に 同 期 して 電 動機 へ 印加 す る交 流 の相 回 転 方 向 を瞬 時 に切 換 え る もの で あ る.な お, エ ンコ ーダ パ ル ス の計 数 お よ び各 操 作 量 の 出力 周 期 は 16msに 設 定 した. 4. 走 行 用 電 動 機 の 速 度 制 御 法 4.1 電 動機 の 速 度 制 御 モ ー ド 2.1 節 で 述 べた よ う に,PWS無 人 車 の基 本 的走 行 機 能 に は直 線 ・曲 線 ・ス ピ ンタ ー ンの各 走 行 が考 え ら れ る.こ の うち,直 線 お よ び曲 線 走 行 につ い て は,左 右 の 電 動 機速 度 制 御 系 へ の 回 転 数 指 令 値 が ほぼ 同一 で あ る か大 き く異 な って い る か の 違 いが あ る もの の,基 本 的 に は 同 じ速 度 制 御 法 で 十 分 と い え る.こ れ に対 し,ス ピ ンタ ー ン走行 で は両 車 輪 の逆 回 転 を 単一 イ ン バ ー タ方 式 で 実 現 す る必 要 が あ り,直 線 ・曲線 走 行 と は異 な る速 度 制 御 法 が必 要 とな る. 4.1.1 直 線 ・曲線 走 行 単一 イ ンバ ータ 方 式で は 両 電 動 機 に対 して 同一 周 波 数 ・同一 相 回 転方 向 の交 流 電 圧 が 印 加 され る.ま た, 位 相 制 御 角 の 調 整 に よ り,両 電 動 機 の 出力 トル クを 制 御 で き るが,一 般 に 回生 制 動 にお いて 位 相 制 御 を併 用 して も,両 電 動機 を独 立 に 制 御 す る こ と はで き な い こ と が ベ ンチテ ス トお よ び試 作車 の 開 ル ープ 走行 実 験 で 判 明 した.し た が って,い ず れ か 片 方 の 電 動機 を大 幅 に減 速 す る必要 の あ る場 合 に は,イ ンバ ータ 出力 の相 回 転 方 向を 反転 し,逆 相 制 動 に よ る減 速 を行 う必 要 が あ る.と ころ で,両 電 動 機 を と も に減 速 す る場 合 は単 に逆 相 制 動 を行 え ば よ い が,い ず れ か 片 方 は大 き く減 速 す る必 要 の な い場 合 に は,逆 相 制 動 に よ る不 必 要 な 制 動 トル クが 減速 を要 しな い 電 動 機 に発 生 す る こと は 好 ま し くな い.そ こで,こ の よ うな 場 合 に は,減 速 を 必 要 と しな い 側 の 電動 機 の 位 相 制 御 角 を180° と し て 単 相 運 転 す る.供 試 電 動 機 の単 相 運 転 時 の 発 生 トル ク は三 相 運転 時 に 比べ て 十 分小 さ いた め,単 相 運 転 期 間 中 は 惰行 運 転 す る こ と にな り,不 必 要 な 急 減 速 を 避 け る こ とが で きる.ま た,回 転 数 指 令 値 と実 際 の 回転 数 の相 対 関係 に よ って,片 方 を加 速 し同 時 に 他 方 は減 速 す る 必 要 が 生 じる場 合 が あ る.回 転 数 偏 差 が 小 さ け れ ば,fINV・ αA・αβ な ど の調 整 で こ とた りる が,偏 差 が 大 き け れ ば 急加 速 と急 減 速 を 同時 に行 う こ と は単 一 イ ンバ ー タ方 式 で は不 可 能 で あ る.そ こで,本 方 式 で は 応 答 性 の優 れ た逆 相 制 動 によ る減 速 を 優 先 させ る こ と と し,い ず れ か一 方 を 大 幅 に減 速 す る必 要 の あ る場 合 に は常 に減 速 を先 行 させ る こと と して い る. 以 上 の こと か ら,直 線 ・曲線 走 行 にお い て は,逆 相 制 動 の 有無 に よ って 電 動 機 の速 度 制 御 モ ー ドが 二 つ に 大 別 さ れ る こと に な る. 4.1.2 ス ピン タ ー ン走 行 単 一 イ ンバ ー タ方 式 で は片 方 の電 動 機 に正 転 トル ク を 与 え,同 時 に他 方 の 電 動機 に逆 転 トル クを 与 え る こ と は 不 可能 で あ る.そ こで ス ピ ンタ ー ン走 行 で は以 下 の手 法 を用 い る. i) モ ー ド1:片 方 を 正転 させ る. ii) モ ー ド2:相 回転 方 向を 反 転 し他 方 を 逆 転 さ せ る.た だ し,こ の 際 も う一 方 の 電 動 機 の 位相 制 御 角 は180° と し単 相 運 転 す る. iii) モ ー ド1と モ ー ド2を 適 宜 交 互 に繰 返 す. こ れ らの モ ー ドを 切 換 え る タ イ ミ ングの 与 え 方 と し て 一 定 時 間 ご と,一 定 走行 距 離 ご と な ど が 考 え ら れ る.前 者 で は,電 動 機-車 輪 駆 動 系 の不 平 衡,車 輪 の ス リ ップ な ど の悪 影 響 が考 え られ る.そ こで,本 研 究 で は,後 者 の方 法 を 改 良 し左 右 輪 の走 行 距 離 を 積 算 し て,そ の偏 差 が あ る一 定値 以 上 にな った 時 点 で モ ー ド 切 換 え した.こ の 方 法 に よ る と,片 方 の 駆 動 輪 の み に 着 目 した一 定 走 行 距 離 切 換方 式 に生 じう る非 駆 動 輪 の 惰 性 に よ る移 動 の累 積 誤 差 を排 除 す る こ とが で き る. また,車 輪 速 度 に上 限 を 設 定 して 実 験 を 行 った. 4.2 速 度 制 御 プ ロ グ ラム 前 節 の方 針 に基 づ い て 作成 した 直 線 ・曲 線 走 行 時 の 速 度 制 御 プ ログ ラムの 概 略 フ ロー チ ャ ー トをFig. 4 に示 す. 図 に示 さ れ る よ う に,逆 相 制動 は両 輪 と も に十 分 減 速 した 時点 で解 除 され る.イ ンバ ー タ の相 回 転 方 向 が 順 方 向 の場 合,い ず れ か の 電 動機 を 大 き く減 速 す る に は,逆 相 制 動 に よ る制 御 を 実施 し,単 相 運 転 を こ こで 併 用 す る.な お,fINVお よ び αA・αβ の決 定 法 に つ い
-88-隈 元 ・平 根:単 一 イ ンバ ー タを 用 い た 複 数 誘 導 電 動 機制 御 の無 人 車 走行 へ の応 用 509 て は,文 献6)を 参 照 さ れ た い.
ス ピ ンタ ー ン走 行 制 御 用 プ ロ グ ラム につ い て は,紙 数 の都 合 上割 愛 す る.
Fig. 4 General flow-chart of speed control in case of either straight or curved course running
(a) V=10m/min (b) V=40m/min (c) V=25m/min 10m/min Fig. 5 Experimental results of straight course running for various vehicle velocity commands (horizontal axis
1s/div) 5. 走 行 実 験 結 果 5.1 直 線 走 行 与 え られ た 無人 車 の速 度 に 対 して両 車 輪 が理 想 的 に 走 行 す る場 合 の 電 動機 換 算 回 転 数 を 指 令 値 ど して これ を メ モ リー に格 納 し,直 線 走 行 を 想 定 した 走行 実 験 を 実 施 した.Fig. 5に 低 速(V=10m/min),中 高 速(V= 40m/min)で の実 験 結 果 を(a), (b)に そ れ ぞ れ 示 す.V=10m/minで の 走 行 時 の理 想 的 電 動 機 回転 数 は260.9rpmで あ るが,両 電 動 機IMA・IMBと もに ほぼ 良 好 に制 御 さ れ て い る こ とが わ か る.ま た,無 人 車 の発 進 時 に は位 相 制 御角 を0° と して大 きな 加 速 ト ル クを 得 て い る こ とが示 さ れ る.高 速 走行 で は イ ンバ ー タ周 波 数 は(b)図 に示 され る よ うに 徐 々 に増 加 さ れ て い る.向(c)図 は25m→10m/minへ の 減 速 の よ う す を 示 す もので,減 速 開始 直 後 の位 相 制 御 角 αAが0° と な って い る期 間 は,逆 相 制 動 が 行 わ れ て い る こと を 示 して い る.以 上,い ず れの 場 合 に も両 電 動 機 の 回転 数 は ほ ぼ指 令 値 に追 従 して お り,十 分 な速 度 制 御 が な さ れ て い る とい え る. 一 般 に,車 両 の 走 行速 度 が 低 い場 合,走 行 軌跡 を 円 弧 状 と 仮 定 して 車 両 の床 面 に対 す る軌 跡 を 算 出 で 幽ぎ る7).そ こで,本 原 理 に よ る位 置計 測 シス テ ム を構 築 し,位 置 計測 情 報 に基 づ いた 簡 単 な 自律 直 線 走行 を試 み た結 果 の一 例 をFig. 6に 示 す.一 定 の 回転 数 指令 を 両 電 動機 速 度 制 御 系 に与 え る の みで な ん らの操 舵 も しな い(a)図 の場 合 で は,床 面 状 況 な ど の 不確 定 性 要 因 に よ り,無 人 車 の 走行 軌 跡 は理 想 的 直 線 経 路(横 軸 方 向)か ら大 き く偏 移す る.こ れ に対 し,な ん らか の 誘 導 を行 え ば(b)図 に示 す よ う に無 人 車 は所 定 の経 路 を追 従 す る.し た が って,操 舵 指 令 を 与 え る誘 導 方 式 を 改良 す る こ と に よ り,本 研 究 で用 い た単 一 イ ンバ ー タ 方 式 によ る誘 導
(a) Without guidance
(b) With self guidance
Fig. 6 Effect of self guidance in case of straight course running (vehicle velocity command V=30m/min)
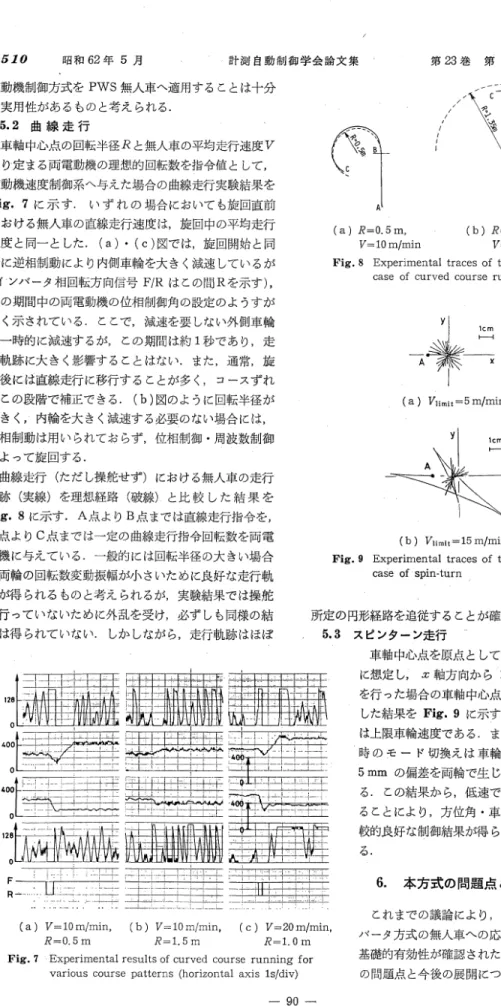
510 昭 和62年5月 計 測 自動 制 御 学 会 論 文 集 第23巻 第5号 電 動 機 制 御 方 式 をPWS無 人 車 へ 適 用 す る こ と は十 分 に実 用 性 が あ る もの と考 え られ る. 5.2 曲 線 走 行 車 軸 中心 点 の 回転 半 径Rと 無 人 車 の平 均 走 行 速 度V よ り定 ま る両 電動 機 の理 想 的 回転 数 を 指 令 値 と して, 電 動 機 速 度 制 御系 へ 与 え た場 合 の 曲線 走行 実 験結 果 を Fig. 7に 示 す.い ず れ の 場 合 に お いて も旋 回直 前 に お け る無 人 車 の直 線 走 行 速 度 は,旋 回 中 の 平均 走行 速 度 と 同一 と した.(a)・(c)図 で は,旋 回 開 始 と同 時 に逆 相制 動 に よ り内側 車 輪 を大 き く減 速 して い る が (イ ンバ ー タ相 回転 方 向信 号F/Rは この 間Rを 示 す), この 期 間 中 の両 電 動 機 の 位 相 制 御 角 の 設定 の よ うす が よ く示 され て い る.こ こで,減 速 を 要 しな い外 側 車 輪 も一 時 的 に 減 速 す るが,こ の 期 間 は 約1秒 で あ り,走 行 軌 跡 に大 き く影 響 す る こ と はな い.ま た,通 常,旋 回 後 に は直 線 走 行 に移行 す る こ とが 多 く,コ ー スず れ は こ の段 階 で 補 正 で き る.(b)図 の よ うに回 転 半 径 が 大 き く,内 輪 を大 き く減 速 す る必 要 の な い場 合 に は, 逆 相 制 動 は用 い られ て お らず,位 相 制 御 ・周 波 数 制 御 に よ って 旋 回 す る. 曲 線 走 行(た だ し操 舵 せ ず)に お け る無人 車 の 走行 軌跡(実 線)を 理 想 経 路(破 線)と 比 較 し た 結 果 を Fig. 8に 示 す.A点 よ りB点 まで は 直線 走 行 指 令 を, B点 よ りC点 まで は一 定 の 曲 線 走 行 指 令 回転 数 を両 電 動機 に 与 え て い る.一 般 的 に は回転 半径 の大 き い場 合 が両 輪 の 回 転 数 変 動 振 幅 が小 さい た め に良 好 な走 行 軌 跡 が得 られ る もの と考 え られ るが,実 験 結 果 で は操 舵 を行 って い な いた め に 外 乱 を 受 け,必 ず しも 同様 の結 果 は得 られ て いな い.し か しな が ら,走 行 軌 跡 は ほ ぼ (a) V=10m/min, R=0.5m (b) V=10m/min, R=1.5m (c) V=20m/min, R=1.0m Fig. 7 Experimental results of curved course running for
various course patterns (horizontal axis 1s/div)
(a) R=0.5m, V=10m/min
(b) R=1.35m, V=10m/min
Fig. 8 Experimental traces of tread center in case of curved course running
(a) Vlimit=5m/min
(b) Vlimit=l5m/min
Fig. 9 Experimental traces of tread center in case of spin-turn 所 定 の 円形 経 路 を追 従 す る こ とが 確 認 さ れ る. 5.3 ス ピ ンタ ー ン走 行 車 軸 中心 点 を原 点 と して 直 交xy軸 を 床 面 に想 定 し,x軸 方 向か ら180° ス ピ ンタ ー ン を行 った 場 合 の車 軸 中 心 点 の 移 動軌 跡 を測 定 した 結 果 を 神Fig. 9に 示 す.こ こで,Vlimit は上 限車 輪 速 度 で あ る.ま た,しス ピ ンタ ー ン 時 の モ ー ド切 換 え は 車 輪 の累 積 走行 距 離 が 5mmの 偏 差 を両 輪 で生 じる ご とに行 って い る.こ の結 果 か ら,低 速 で ス ピ ンタ ー ンさせ る こと に よ り,方 位 角 ・車 軸 中心 点 と もに 比 較 的良 好 な制 御結 果 が 得 られ る こ とが 示 され る. 6. 本 方 式 の 問 題 点 と 今 後 の 展 開 これ ま で の 議 論 に よ り,本 提 案 の単 一 イ ン バ ータ方 式 の 無 人車 へ の応 用 に つ いて,そ の 基 礎 的 有 効 性 が確 認 さ れ た.こ こで,本 方 式 の 問題 点 と今 後 の展 開 に つ い て 考 察す る.前
隈 元 ・平 根:単 一 イ ンバ ー タを 用 い た 複 数 誘 導 電 動 機 制 御 の 無 人 車 走 行 へ の 応 用 511 者 と して は トラ イ ア ック に よ る イ ンバ ータ の 不 平衡 制 御 お よ び イ ンバ ータ ・電 動機 系 の単 一 イ ンバ ータ方 式 に帰 因 す る非 線 形 制 御 な ど に よ る制 御 性 の 低 下,振 動 の増大 な どが 考 え られ る.ま た,イ ンベ ータ 周 波 数 が 低下 す る につ れ て,位 相 制 御 周 期 が 長 く な る 結 果, 電 動機 制御 を 高 速 に行 え な くな る.こ れ らの 欠 点 は本 方式 で は あ る程 度 や む を 得 な い もので あ るが,本 方 式 が小 形 ・低 価 格 ・簡 易 な無 人 車 の開 発 を 目的 と して い る こ と もあ って,実 用 上 大 きな 障害 と な る こ と はな い もの と 考 え ら れ る.な お,実 際 の走 行 実 験 に際 して は,ス ピ ンタ ー ン走 行 を 除 いて 比 較 的 振 動 も少 な く, 良 好 な 走行 が 確 認 され て い る.ま た,イ ンバ ータ の低 周 波 運 転 は無 人 車 の発 進 ・停 止 時 の み に用 い られ る も ので,こ の 際 に高 速 な 電 動機 制 御 は そ れ ほ ど要 求 さ れ る こ と はな い. 今 後 の展 開 と して は,本 方 式 の解 析 結 果 に基 づ く制 御 プ ロ グ ラム の改 良 と 単 一 イ ンバ ー タ方 式 の 無 人 車以 外 へ の 応用 が考 え られ る.誘 導 電動 機 の単 一 イ ンバ ー タ制 御 時 の特 性 解 析 はパ ワー エ レク トロ ニ クス手 法 を 用 いて 十 分 に可 能 で 毒 ろ う.し か しな が ら,電 動 機 を 制 御 す る理 由 は本 質 的 に は無 人 車 の経 路 に対 す る位 置 を 制 御 した いか らで あ る.ま た,イ ンバ ータ は本 質 的 に は電 動 機発 生 トル ク を 調節 す る も の で あ る.そ こ で,よ り優 れた 無 人 車 シス テ ム の実 現 に は,PWS車 の両 輪 へ の 印加 トル ク を 入 力 と し無 人 車 位 置 を 出 力 と す る無 人車 ダ イ ナ ミク ス を究 明す る必 要 が あ る.イ ン バ ー タ ・電動 機 系 の特 性 解 析 は こ のダ イ ナ ミ クス の究 明 と結 合 して 初 めて そ の 真価 を 発 揮 す る もの で あ る. な お,本 提 案 の方 式 の他 へ の応 用 につ いて は,リ ニ ア誘導 電 動機 方 式 パ レ ッ ト搬 送 シ ス テ ムが あ る.リ ニ ア誘 導 電 動機 を 経 路 沿 い に多 段 設 置す る際,こ れ らを 個 々の イ ンバ ー タで 制 御 す る こ と は コス ト的 に も割 高 にな る.そ こで,い くつ か の電 動 機 を 一 括 し,単 一 イ ンバ ー タ方 式 で 同時 制 御 す る こ とが 考 え られ る.こ の 際 は,近 接 す る2台 の リニ ア誘 導 電 動 機 を互 い に逆 方 向 推進 力 を生 じる よ う に制 御 す る 必 要 が な く,PWS 車 の ス ピ ンタ ー ン走 行 で 採用 した よ う なモ ー ド切 換 え も不 要 とな る.し た が って,単 一 イ ンバ ー タ方 式 に位 相 制 御 を併 用 す る今 回 提 案 の方 式 で 十 分 で あ る と考 え られ,今 後 の検 討 課 題 の一 つ と いえ よ う. 7. あ と が き PWS無 人 車 の 走 行 用 電 動 機 制 御 方 式 と して,現 在 用 い られて い る直 流 電 動 機 に代 って 誘 導 電 動機 を 用 い る際 に,電 動 機 駆 動 回 路 の簡 単 化 が 実 現 さ れ る単 一 イ ンバ ー タ方 式 を 提 案 した.本 方 式 の 電 動 機 制御 方 法 を ベ ン チ テ ス ト な らび に実 規 模 の試 作 車 によ る回 転 数 フ ィー ドバ ック を有 しな い開 ル ー プで の 走 行 実 験 を も と に基 礎 特 性 を 考 察 し,こ れ よ り 閉ル ープ 制 御 プ ログ ラム を作 成 して,各 種 走 行 実 験 に より 提 案 の 方 式 の有 効 性 を 主 と して 電 動 機 制 御 につ いて 確 認 した.本 研 究 で 得 られ た 主 要 な結 論 はつ ぎの とお りで あ る. (1) 単一 イ ン バ ー タ 方 式 複 数 誘 導 電 動 機 制 御 で は,両 電 動 機 を 独 立 制 御 す るた め には,周 波 数 制 御 位 相 制 御 ・イ ンバ ー タ 出力 交 流 の 相 回 転 方 向 制 御 を 行 う必 要 が あ る.ま た,回 生 制 動 に位 相 制 御 を 併 用 す る こ と は必 ず しも電 動 機 の 独 立 制 御 を 保証 しえ な い. (2) 無 人 車 走 行 に あた り基 本 的 走行 機 能 と して 考 え られ る直 線 ・曲線 ・ス ピ ン タ ー ン の 各 走 行 につ い て,試 作 車 を 実 際 に走 行 させ る こ とで,提 案 の 方 式 に よ って十 分 に制 御 で き る こ とが 確 認 され た. (3) 走 行 実 験 は基 本 的 に外 部 誘 導 され る無 人 車 を 想 定 して い る た め 一定 の 回転 数 指 令 値 で 行 った が,一 部 自律 走行 を試 み て本 方 式 の無 人 車 を 上 位 誘 導 制 御 系 で 外 部 誘 導 す る 際 の性 能 の めや す と した.こ れ よ り, 無 人車 の 姿 勢 な ど の制 御 が十 分 に可 能 で あ る ご とが 判 明 した. (4) 実 車 へ の応 用 に 関 して は,誘 導 方 式 の 検 討 と 共 に 停止 精 度 な ど につ いて 検 討 す る必 要 が あ る.こ の た め に は無 人 車 の誘 導 シ ステ ム を 確 立 す る こ とが 要 請 さ れ る が,本 研 究 は主 と して 提 案 の 方 式 に よ る走 行 駆 動 系 の動 作 に重 点 をお いて 検 討 した もの で あ り,こ の 点 につ いて は今 後 の研 究 に待 ち た い. 最 後 に,本 研 究 の遂 行 に 際 し多大 の便 宜 を 仰 い だ 日 立 機 電 工 業(株)の 関係 各 位 な らび に 実験 に協 力 して い た だ いた 岡 部 淳 一 郎 君(現 在 三 菱 電機(株)勤 務)に 深 謝 す る. 参 考 文 献 1) 高野英 彦監修:自 動搬送技 術,252,ト リケ ップ ス (1983) 2) 金沢,山 本,畑,村 田,大 庭,田 中:小 物 搬送無人車 「ミニカ ー ト」,神鋼電機, 26-4, 50/56 (1981) 3) 岡部,隈 元,平 根,田 中:単 一 インバ ータによる複数 誘 導電動 機相互運 転 システム,昭 和58年 電気学会全国大会 講演論文集, 629 (1983) 4) 同上:単 一 インバ ータに よ る複数誘導電動機相互運転 シ ステ ム 〔II〕,昭和58年 電気関係 学会 関西支部連合大会 講演論文集, G92 (1983) 5) 同上:電 気車走行 のための単一 インバータに よ る2機 誘 導電動機 の 制御方式,第7回 ビークル ・オ ー トメー ショ ン ・シンポジウム講演論文 集, 13/16 (1984)
6) J. Okabe, A. Kumamoto, Y. Hirane and H. Tanaka: Independent Closed-Loop Control of Two Induction Motors Paralleled to a Single Inverter and its Application to an Automatically Guided Ground Vehicle, Proceedings of IECON '84, 180/185 (1984)
7) 津 村,藤 原,白 川,岡 崎:地 図上 の コ ース 指 示 に よ る 移 動 体 の 自動 誘 導,シ ス テ ム と制 御, 25-3, 167/174 (1981)