Right-angled Artin group のハンドル体群への埋め込 みに関して
久野恵理香
(Erika KUNO) (
東京工業大学)
∗本稿では
, H = H
g,n を種数g ≥ 0, marked point n ≥ 0
個付きの連結コンパクト向き 付け可能ハンドル体とし, その境界∂H
を種数g ≥ 0, marked point n ≥ 0
個付きの連 結コンパクト向き付け可能曲面S = S
g,n と見なす.
1.
導入2012
年にKoberda [2]
がグラフΓ
がS
の曲線グラフC (S)
のfull subgraph
であるな らばΓ
上のright-angled Artin group A(Γ)
はS
の写像類群Mod(S)
の部分群になる ことを示した.
更に2013
年にKim-Koberda [1]
がS
の複雑度が2
以下のとき上記の逆 が成り立つ,
すなわちA(Γ)
がMod(S)
の部分群になるときΓ
はC (S)
のfull subgraph
になることを示し, S
の複雑度がn ≥ 4
のときに各n
に対してグラフΓ(n)
でA(Γ(n))
はMod(S)
の部分群になるがΓ(n)
はC (S)
のfull subgraph
にならないものを構成し た. H
のハンドル体群Mod(H)
はS
の写像類群Mod(S)
の部分群であり, H
の円板 グラフD (H)
への作用がある.
本稿では,
ハンドル体群と円板グラフに対して同様のこ とを考え得られた結果について報告する.2.
準備2.1.
グラフ本稿ではグラフ
Γ
とは1
次元有限単体グラフを指すこととする. V (Γ)
をΓ
の頂点集 合, E(Γ)
をΓ
の辺集合とする.
更にグラフはループや多重辺を持たないとする.
定義2.1. X ⊂ V (Γ)
に対し, X
によるΓ
のfull subgraph
またはX
による誘導部 分グラフΛ
とは, Λ
の頂点集合をX
とし, Λ
の辺集合をX
内に両端点を持つΓ
の辺 全体として定められたグラフのことである.Γ
の頂点v
のΓ
内のlink
とはv
と辺で結ばれる頂点全体の集合のことである.
ま た, n
個の頂点上の完全グラフK
とはK
の各頂点がK
のその他の全ての頂点と辺で 結ばれるグラフである. Γ
の誘導部分グラフで完全グラフであるものをclique
という.
定義2.2.
正の整数N
に対してΓ
がN -thick stars
を持つとは, Γ
の各頂点v
のlink
が異なる2
つのN − 1
個の頂点上のclique
を含むことである.
2.2.
ハンドル体種数
g ≥ 0
のハンドル体H
g とは3
次元球体にg
個の1-
ハンドルD
2× I
を貼り合わ せることで得られる3
次元多様体である. 但し,D
2 は2
次元円板でI
は区間である.H
g の境界∂H
g は種数g
の連結向き付け可能閉曲面S
g となる.
種数g ≥ 0, marked point n ≥ 0
個付きのハンドル体H = H
g,n とは, ∂H
g 上のn
個の点に名前p
1, p
2, · · · , p
n を付けることで得られる3
次元多様体である.H
の境界∂H
を種数g ≥ 0, marked point n ≥ 0
個付きの連結コンパクト向き付け可能曲面S = S
g,n と見なす. H
内の円 板d
がH
に固有に埋め込まれるとは, d
の内部はH
の内部に, d
の境界はH
の境界に∗〒
152-8551
東京都目黒区大岡山2-12-1
東京工業大学大学院理工学研究科 数学専攻e-mail: [email protected]
埋め込まれることである
. H
内に固有に埋め込まれた円板d
が 本質的であるとは, d
は∂H
上の円板の境界にならなく, かつ∂H
上の1
つのmarked point
にアイソトピッ クにならないことである.
本稿では円板とはH
に固有に埋め込まれた本質的な円板を 指すこととする.
定義
2.3.
ハンドル体H
上のmulti-disk
とはH
内の互いに交わらなくアイソトピック でないいくつかの円板の和集合のことである. H
の複雑度をξ(H) = max { 3g − 3 + n, 0 }
と定める. これはH
内のmulti-disk
の成分数の最大に一致する. 成分数が3g − 3 + n
であるmulti-disk
をmaximal multi-disk
という(
例は図1).
図
1: H
g,n 内のmaximal multi-disk
の例.
S
上のmulti-curve
を定義2.3
のH
内の円板をS
内の本質的単純閉曲線に変え ることで定める. S
の複雑度はξ(H) = max { 3g − 3 + n, 0 }
でありH
の複雑度と一致 する.
定義
2.4. H
の 円板グラフD (H)
とは,
円板のアイソトピー類を頂点とし, 2
つの頂点 はそれらに対応する円板のアイソトピー類の中で横断的に交わらない代表元の組が選 べるときに辺で結ばれると定めることによってできるグラフのことである(例は図 2).
図
2: H
1,5 のdisk graph
の例.
S
の 曲線グラフC (S)
は定義2.4
の円板のアイソトピー類を本質的単純閉曲線のア イソトピー類に変えることで定められるグラフである.
定義
2.5. H
のハンドル体群Mod(H)
とはH
上の向きを保つ微分同相写像のアイソ トピー類でH
上のmarked point
の集合を保つもの全体に写像の合成を演算として群 構造を入れたものである. H
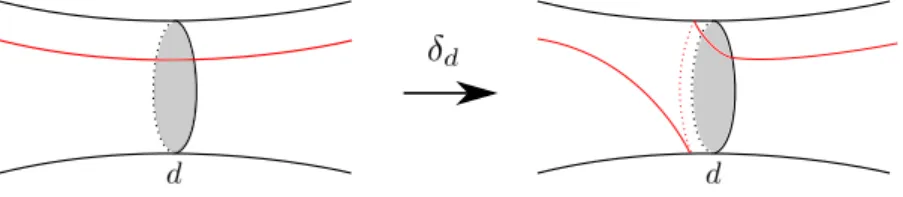
内の円板d
に沿ったdisk twist δ
dとはd
に沿ってH
を 切りその片側を2π
右に回転させ再びd
でH
を貼り合わせるという操作で得られる微 分同相写像のことである(図 3
を見よ). Mod(H) の元ϕ
がmulti-disk twist
である とは, ϕ
がいくつかの互いに交わらなくアイソトピックでない円板に沿ったdisk twist (
の累乗)
を合成したものを代表元に持つことである.
図
3: disk twist
の例.
S
の写像類群Mod(S)
は定義2.5
のH
上の向きを保つ微分同相写像をS
上の向き を保つ微分同相写像に変えることで定義される群である. Mod(H)
はMod(S)
の部分 群になる.2.3. Right-angled Artin group
定義
2.6.
有限グラフΓ
上のright-angled Artin group A(Γ)
とは以下の表示から 与えられる有限生成群のことである:A(Γ) = ⟨ V (Γ) | [v
i, v
j] = 1 ⇔ { v
i, v
j} ∈ E(Γ) ⟩ .
例(Right-angled Artin group)
(1)
図4 (a)
は, ⟨ v, w | [v, w] = 1 ⟩ ∼ = Z × Z
となる,
但しZ
は整数全体の集合である. (2)
図4 (b)
は, ⟨ v, w | ∅⟩ ∼ = F
2 となる,
但しF
2 は階数2
の自由群である.
(3)
図4 (c)
は,⟨ v, w, x, y | [v, x] = [v, y] = [w, x] = [w, y] = 1 ⟩ ∼ = F
2× F
2 となる.(4)
図4 (d)
は, ⟨ v, w, x, y | [v, w] = [x, y] = 1 ⟩ ∼ = (Z × Z ) ∗ ( Z × Z )
となる.
図
4:
グラフからright-angled Artin group
を定める例.
定義
2.7. A(Γ)
からMod(H)
への埋め込み(単射準同型) f
が標準的であるとは以下の
2
つの条件を満たすことである.
(i)
写像f
はΓ
の各頂点をmulti-disk twist
にうつす.
(ii)
グラフΓ
の異なる2
つの頂点u
とv
に対して,f (u)
のsupport
はf (v)
のsupport
に含まれない.
但しmulti-disk twist
のsupport
とはそのmulti-disk twist
に含まれる各
disk twist
を施す円板の正則近傍の和集合のことである.
3.
主結果定理
3.1. Γ
がD (H)
の誘導部分グラフであるならばA(Γ)
はMod(H)
の部分群に なる.
定理
3.2. H
の複雑度が0
または1
であるとすると, A(Γ)
がMod(H)
の部分群なら ばΓ
はD (H)
の誘導部分グラフになる. H
の複雑度が2
でA(Γ)
からMod(H)
への 標準的な埋め込みが存在するとするとΓ
はD (H)
の誘導部分グラフになる.
定理
3.3. Γ
0 を図5
のグラフとする. H = H
0,7, H
1,5 に対してA(Γ
0)
はMod(H)
の部 分群になるがΓ
0 はD (H)
の誘導部分グラフにならない.図
5:
グラフΓ
0.
定理
3.4. H
を複雑度がN
の任意のハンドル体とする.Γ
がN -thick stars
を持ちA(Γ)
からMod(H)
への標準的な埋め込みが存在するならばΓ
はD (H)
の誘導部分グラフになる
.
謝辞
研究集会「第
12
回 数学総合若手研究集会」での講演の機会を与えてくださった運営委 員の方々には心より感謝申し上げます.
また,
日頃から研究に関することで常に背中を 押してくださり,
本研究においても丁寧にご指導をしてくださった東京工業大学の遠藤 久顕先生には感謝してやみません。そして,
奈良女子大学の張娟姫先生と東京理科大学 の廣瀬進先生にはハンドル体群や円板グラフに関して大変有益な助言をいただき大き な学びとなりましたことを改めて厚く御礼申し上げます.
参考文献