1.はじめに 海洋における掘削装置の仕組み自体は陸上とほぼ同 様で,根本的な違いは次の3 点と言える. 海上に掘削装置類を搭載する設備(船体部) 海上設備を定点保持する設備 浮遊式掘削リグに必要な装置 掘削装置自体については,既に種々の参考書があるの で省略し,本寄稿では上述の点について紹介する.ま た,海洋掘削に特有な海底下の掘削リスクとその対処 技術について紹介する. 2.掘削装置搭載設備の種類と定点保持方法 掘削装置を搭載する設備は通常掘削装置類を含めて 移 動 式 海 洋 掘 削 装 置 (MODU: Mobile Offshore Drilling Unit)と呼ばれ,ジャッキアップ・リグ,セ ミサブマーシブル・リグ及びドリルシップと大きく3 種類に分類される. 2.1 ジャッキアップ・リグ ジャッキアップ・リグは,着底式甲板昇降型海洋掘 削装置といわれ,掘削装置を搭載した船体部と,昇降 可能な脚(レグ)より成る(図1 参照). 図1 ジャッキアップ・リグ(JDC Hakuryu-10) 移動時は脚を上げ船体浮上し,掘削作業時は脚を下げ 船体部を海面上に持ち上げて作業を行う.脚の昇降装 置はラックアンドピニオン式が一般的である.脚数は 三脚型が主流となっている.従来の掘削装置が船体の 内側にあるスロット型に対し,船体外側へオーバーハ ングするカンチレバー型が登場し,ウェルヘッドプラ ットフォーム(ジャケット)での掘削・改修作業など の作業性に優れていることから,最近建造されるジャ ッキアップ・リグは大部分がカンチレバー型となって いる.ジャッキアップ・リグの稼働限界水深は,約 400ft(120m)である.ジャッキアップ・リグの総数 は,2015 年 1 月 20 日現在,541 基であり,移動式 海洋掘削装置総数 954 基の 57 %を占めている. ジャッキアップ・リグは,掘削施設を持たない生産プ ラットフォームで使用される場合が多い.脚(レグ) はジェッティングによって海底面下に貫入される.脚 (レグ)の貫入は予想される最大荷重に耐えうるとこ ろまで行われ,その最大荷重で沈み込みがないことを 確認する(Pre Loading).軟弱海底地盤では 100ft (30m)程度も貫入することがある.掘削実績のない 地域では,事前に海底ボーリングを実施し脚の貫入度 合いを調査することが必要である. 定点保持の方法は,脚にて海底に固定されるため,一 旦設置されれば特別な定点保持のための設備はない. ただし,潮流のある地域ではスパッドカンの下側の洗 掘や,過去の脚の跡地(フートプリント)に一部の脚 が入り,脚が曲がる事があるので注意・監視が必要で ある. 2.2 セミサブマーシブル・リグ 半潜水型海洋掘削装置といわれ,ロワーハル,コラ ム,ブレースおよび掘削装置などを搭載したデッキよ り成っている(図 2 参照).移動時には,ロワーハル まで浮上し,曳航時の抵抗を少なくする.稼働時には, ロワーハルのバラスト・タンクに注水しコラム部まで 喫水を沈めた半潜水の状態になり,波の影響を受けに くい.この型式の特徴は,比較的大水深においても稼 働可能であることと,動揺特性に優れており,気象・ 海象の厳しい海域でも高い稼働率を持つことであり, 北海,アラスカなどではセミサブマーシブル・リグが 主流となっている.2015 年 1 月 20 日現在,セミサ
海 洋 で の 掘 削 技 術
吉 田 肇海洋での掘削技術
吉 田 肇ブマーシブル・リグの総数は 205 基であり,移動式 海洋掘削装置総数 954 基の 21 %を占める. 図2 セミサブマーシブル・リグ(JDC Hakuryu-5) セミサブマーシブル・リグの稼働水深は,80 年代アン カーを用いた係留方式で約 1,500ft(500m) といわ れていたが(石油・天然ガス用語辞典),90 年代には 3,000ft(1,000m)となり,近年合成繊維の係留索が 開発されたことにより,8,951 feet (2,728 m) の水深 において係留方式にて掘削されたという記録がある (Wikipedia Deepwater Nautilus).
アンカーの効きは海底土質によるため,掘削実施前に は事前調査が実施されるのが一般的である.アンカー の効きに不安がある場合,孫アンカーが準備される. アンカー設置後には,予め設定された引っ張り荷重ま でかけて(Pre Tension),荒天時でもアンカーが滑ら ないことを確認する.荒天時の設定は,当該地域にお ける10 年ストームの最大値が採用される場合が多い. 海底にパイプライン等の生産施設が存在している地点 での作業においては,アンカー及び係留索が海底生産 設備を損傷させる恐れがあるので,予めアンカーを設 置しておくPre-laid mooring system も採用される. 大水深での探鉱が進むに従い,セミサブマーシブル・ リグにて DPS (Dynamic Positioning System:自動 船位保持)方式が採用され,現在,DPS 方式を用い
たセミサブマーシブル・リグの最大稼働水深は 約
10,000ft(3,000m) である.ちなみにセミサブマー シブル・リグの世代別稼動水深は表1 のとおり.
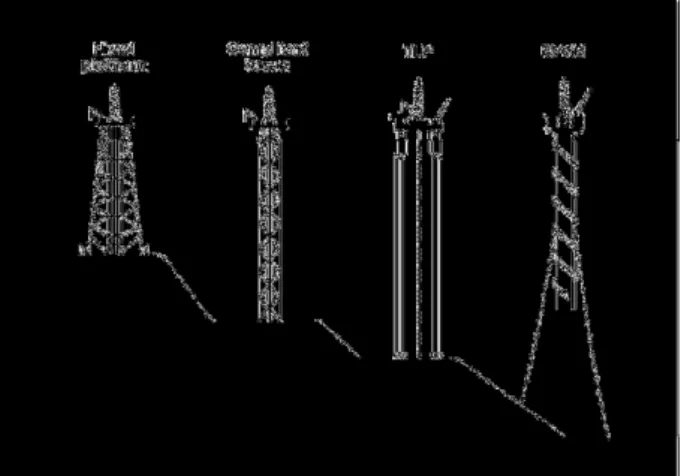
表1 セミサブマーシブル・リグ世代別稼動水深一覧 (出典:Wikipedia Semisubmersible rig) Generation Water Depth Dates First about 600 ft 200 m Early 1960s Second about 1000 ft 300 m 1969–1974 Third about 1500 ft 500 m Early 1980s Fourth about 3000 ft 1000 m 1990s Fifth about 7500 ft 2500 m 1998–2004 Sixth about 10000 ft 3000 m 2005–2010 アンカー方式では水深が深くなるほど,設置・回収に 時間を要する.DPS 方式では,アンカー設置・回収は 必要ないが,定点保持するための燃料消費が大きい. 2.3 ドリルシップ 通常の船体上に掘削装置を搭載していることから船 型といわれる(図 3 参照).ドリルシップはセミサブ マーシブル・リグと比較すると,曳航抵抗が少なく移 動性に優れている.また,資機材の積載容量が大きい などの特徴を持つが,半面,波浪中の動揺特性が悪く, 厳しい気象・海象条件下では稼働率が低下する.北海 やアラスカなどではセミサブマーシブルが使用される 例が多いが,2014 までの油価上昇により,大水深での 探鉱が促進されたため,ドリルシップの建造数は上昇 の傾向にある.2015 年 1 月 20 日現在のドリルシップ の総数は 117 基であり,移動式海洋掘削装置全体の 12%を占める.定点位置保持方法として,ドリルシッ プの大半はDPS (自動船位保持)方式が採用されて いる. 図3 ドリルシップ (JAMSTEC 地球深部探査船ちきゅ う) 3.生産施設を含む場合の掘削装置類を搭載する 設備 掘削装置は海上生産施設においても設置されており, その代表的な海上生産施設として,固定式プラットフ ォーム,コンプライアント・タワー,TLP(Tension Leg Platform)及び SPAR(Single Point Anchor Reservoir)
が挙げられる(図 4 参照).生産設備を含む浮遊式施
設の係留設計では,100 年ストーム以上の最大値が使 用されるのが一般的である.
図4 掘削装置を設置可能な海洋生産施設(JDC) 3.1 固定式プラットフォーム 海洋にジャケットを設置してパイルにて固定する方 法で,これまで設置された最大はBullwinkle platform で高さが529m あり,412m の水深に設置された.場 所にもよるが経済的な最大水深は,一般的に約1,000ft (300m)と言われている.日本では,岩船沖プラッ トフォームや磐城沖プラットフォーム(撤去済),阿賀 沖プラットフォーム(撤去済),阿賀沖北プラットフォ ーム(撤去済)の実績があり,撤去されたプラットフ ォームのジャケット(脚部分)は,人口漁礁として再 利用されている.北海ではコンクリートベースのプラ ットフォームも存在するが,廃鉱時に撤去困難なこと もあり現在では採用されていない(OSPAR 条約 : Oslo and Paris Conventions では 1999 年 2 月 9 日以 降に設置した施設は完全撤去することが義務づけられ ている). 3.2 コンプライアント・タワー(Compliant Tower) コンプライアント・タワーは,細くて柔軟な塔状の 構造物を積み重ねた基礎の上に,掘削生産設備を収容 したデッキを載せているものである.コンプライアン ト・タワーは横方向の大きなたわみや力に耐えられる ように設計され,深さが1,500 フィートから 3,000 フ ィート(500m から 1,000m)くらいまでの範囲で使 用される.最大のコンプライアント・タワーは, Petronius Platform で 610m ある.
3.3 TLP(Tension Leg Platform:緊張係留式プラッ トフォーム) 緊張係留式プラットフォーム(TLP)は水に浮く構 造物をケーブルで海底に,ほとんどの縦方向の動きが 起きないような方法で固定したものである.構造物に は強い浮力が掛かるように設計されており,ケーブル で海底へ強く引っ張ることでほとんど移動しない構造 物を実現している.TLP は 6,000 フィート(2,000m) ほどの深さまで使用される.従来のTLP は,セミサ ブのような 4 つのコラムを備えた構造をしている (Wikipedia 石油プラットフォーム). 浮体構造物には常時垂直方向に対して1,000 トン超の 強い力がかかるため,TLP は水平・垂直方向への動揺 が小さな範囲にとどまり,台風等の悪天候の海象条件 でも安定した状態を確保することができる. TLP は 1980 年代から使用されるようになり,現在メ キシコ湾を中心に世界で約20 基の TLP が稼動してい る(MODEC 社 home page).
3.4 スパー(SPAR) スパーは,TLP のように海底に係留されているが, TLP が垂直方向に張力を持つケーブルで固定されて いるのに対して,スパーは従来型のケーブルで固定さ れている.代表的なスパーは1 つの垂直な円筒状の構 造物から構成される.小型や中型のプラットフォーム を造る上では,TLP よりもスパーの方が経済的であり, また下部に錘を持ち垂直の向きを保つために(係留索 に頼っていないために),本質的に安定している.係留 索に備えられたチェーン・ジャッキを利用することで, 水平方向に移動することもできる.最初に生産を開始 したスパーは,カー・マギー(Kerr-McGee)のネプ チューン(Neptune)で,メキシコ湾の 1,930 フィー ト(588m)の深さの地点に設置された浮体生産設備 である.ドミニオン石油(Dominion Oil)のデビルズ・ タワー(Devil's Tower)というスパーは 5,610 フィー ト(1,710m)の深さの地点に設置されていて,世界最 深のスパーである. 3.5 ドライツリー・セミ(DTS) TLP は 6,000ft 以上の水深では経済的でない,スパ ーはトップサイドとのインテグレーションやコミッシ ョニングに困難を有することから,セミサブマーシブ ル型の掘削装置を有する生産施設も研究開発されてい る.従来のセミサブマーシブル型生産施設を利用した 開発では海底ツリーが採用されており,区別するため にドライツリー・セミと呼ばれ,水深8,000ft までの 開発が目指されている. 4.浮遊式掘削リグに必要な設備 (ライザーシステム及び海底 BOP 装置など) 4.1 マリン・ライザー 浮遊式掘削リグ(セミサブマーシブル・リグ,ドリ ルシップ)の場合は,マリン・ライザーと呼ばれる導 管を設置して泥水循環を可能にする.マリン・ライザ ーは通常 20in ケーシング設置後に海底暴噴防止装置 (BOP: Blow Out Preventer)とともに降下し,20in ケーシング上端部の坑口装置(ウェルヘッドハウジン グ)に接続され,それ以深の掘削は泥水循環が可能と なる.マリン・ライザー下端には,海上の船体が流さ
れた場合,若しくは流される可能性のある場合(台風
時退船)に,海底BOP を残して離脱できるような装
置(LMRP: Lower Marine Riser Package)が装備さ れる.またマリン・ライザーはライザーテンショナー で船体に接続され,船体の縦方向の動揺(Heave)を 吸収し,一定吊り荷重を維持できるようになっている. マリン・ライザーには海底BOP にて制限循環を可能 にするために,チョークライン及びキルラインが付属 している(図5 参照). 図5 マリン・ライザー及びサブシーBOP 概要図 (出典:長縄成実,石油開発時報No.151(06.11) 最新の坑 井掘削技術その4) 大水深になると,チョークライン・キルラインに加え, 掘削ザクの上昇を補助するためのブースターライン, 海底BOP の作動に必要なハイドロリックラインが付 属する.大水深になるほどライザーの重量及び体積は 増し,船体の大型化に繋がる.最近では大水深用に, 炭素繊維強化プラスチックやチタン素材を使用したラ イザーが研究開発されている. 4.2 海底暴噴防止(サブシーBOP)システム BOP の機構自体は陸上の BOP と同様であるが,業 界 の 標 準 の 一 つ で あ る American Petroleum Institute(API)が発行する BOP システムに関する 文書が改訂され,浮遊式リグでは2式のシェア・ラム (内 1 式はブラインド・シェア・ラム)を装備するこ とが標準となった.係留式リグの場合に限り,リスク 評価を実施した後,1 式のブラインド・シェア・ラム が適応され得る.BOP は種類及び段数により分類され, 4 段のラム型BOP と 2 段のアニュラー型BOP を有す る場合は,Class 6-A2-R4 と表される.ドリルシップ ちきゅうのBOP は Class 7-A2-R5 である.最新のド リルシップではラム型BOP を 7 段有するものも存在 する. サブシーBOP を開閉させるためのコントロールシス テムについて,API はラム型 BOP では 45 秒以内,ア ニュラー型BOPでは60秒以内に閉じることを要求し ている.大水深適応リグでは,BOP の迅速な操作を可 能にするために,従来の全油圧式に代わって電子制御 油 圧 式 (EH-MUX :electro hydraulic multiplex control system)が装備されている. 4.3 モーション・ヒーブ・コンペンセータ マリン・ライザーに一定の吊り荷重を維持できるよ うライザーテンショナーが必要なように,ドリルスト リングにも一定の荷重を維持させる装置が必要である. この装置はモーション・ヒーブ・コンペンセータと呼 ばれ,トラベリングブロックとフックの間に設置され るものと,クラウンブロック上に設置されるものがあ る.加えて最近では,船体の上下動を予測してコンペ ンセートを行うアクティブ・ヒーブ・コンペンセータ (AHC)が 開発され,アクティブ・ヒーブ・ドロー ワークスが製品化されている.ただ,パワーの消費が 激しい,バックアップの必要性等から,パッシブ(従来 方式)との併用が多いようである. 5. 例外的なシステム 5.1 サーフェス BOP システム セミサブを使用したサーフェスBOP システムは, 当初UNOCAL 社によってインドネシア等の海象が穏 やかな地域で実施された.13-3/8”ケーシングを海上ま で延長してライザーの替わりとしている.Shell社は, 本システムに改良を行い,海底部にサブシー・ディス コネクト・システムと呼ばれる二つのシェアラムと LMRP を装備し,緊急時に離脱できるようにしている. 本システムの利点は,大水深掘削において,従来の 21inOD のマリン・ライザーを使用せず,軽量の 10-3/4in から 16in のライザーを使用できることであ る.そのためリグ料率の高い大水深リグでなく旧型の リグを改造することで掘削可能になり,トータル的な 探鉱費用が安くなる.Shell 社は 2003 年にセミサブマ ーシブル・リグ「Stena Tay」を使用して,ブラジル 沖合(水深 9,474ft)にて掘削を実施している.2011
年にはShell 社の依頼を受けて,Noble Drilling 社が
サーフェスBOPシステムを適用可能なドリル・シップ
「Bully I」及び「Bully II」を建造している. 5.2 Top Tension Riser System
TLP,SPAR は動揺が極めて小さいため,生産固定 式 Platform と同様にライザー若しくはケーシングを 海上まで立ち上げられる.この場合,ライザーは自立 保持できないため,また船体の動揺を吸収するために, セミサブマーシブル・リグやドリルシップ同様ライザ ーテンショナーが使用される.本システムは Top
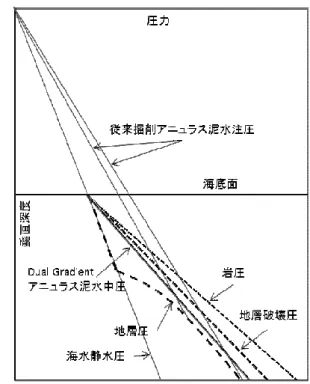
Tension Riser (TTR) system と呼ばれる.これらは固 定式プラットフォーム同様ドライツリーと呼ばれる方 法の仕上げとなる. メキシコ湾におけるRiser Tensioner のストロークレ ンジは,TLP で 6-10ft,SPAR で 20-28ft であり,DTS では35ft と言われている(OTC24148). 6.狭い地層圧と地層破壊圧幅への対応 (海洋特有の掘削技術) 一般的に水深が深くなればなるほど地層圧と地層破 壊圧の間隔は狭くなる.これはEaton 式で説明できる. 岩圧は岩石密度の深度積分で求められるため,水深が 深くなれば岩圧も小さくなる.地層破壊圧は次式で求 められ,岩圧が小さければ地層破壊圧も低くなる. FG:地層破壊圧 :ポアソン比 Sv/D:岩圧 Pf/D:地層圧 通常は岩圧の65%から 85%が地層破壊圧となる. 一般的に大水深になればなるほど,地層破壊圧勾配が きつくなり,浅い深度で逸泥(坑内泥水が地層に流れ込 む現象)が顕著になる. 地層圧が上昇するに伴い,地層水の坑内浸入を抑える ため,泥水比重を増加させるが,大水深では海底面か ら海上までの泥水柱圧が海水に比べて大きく,上述し たように浅い深度で地層を破壊して逸泥してしまう. 従って当該区間を掘削するためには,多段のケーシン グ,慎重な掘削計画が必要となり,コスト高となって い た . こ の よ う な 事 態 に 対 処 す る た め に Dual Gradient Drilling と呼ばれる技術が開発されている. 例えば,図 6 のような地層圧・地層破壊圧の坑井を, 従来工法で掘削するには3 段のケーシングを必要とす
るが,Dual Gradient Drilling(海底までは海水の静 水圧,海底面下は泥水中圧)を採用すれば設置するケ
ーシングの数を減らすことが出来る.
図6 Dual Gradient Drilling 図解(JDC) 6.1 Dynamic Kill Drilling
予め高比重・高濃度の泥水を十分準備しておき,コ ンピュータ制御されたミキシングマニフォールドにて 海水とミックスして適切な比重とし,通常の泥水ポン プにて泥水を送る技術である.掘屑と泥水は海底面に 放出される.高比重泥水は沈殿を避けるために16ppg (1.92SG)が採用されている.循環を続けるため,予 想掘進率や必要ポンプレート等十分な事前検討が必要 である.リグのタンク容量で間に合わない場合は,サ プライボートに重泥水を準備しておく必要がある.ハ ードウェア自体の準備は困難なものではないが,多量 の泥水を必要とするため,泥水組成は安価なものでな ければ経済的とならない. 6.2 ライザーレス・マッド・リカバリー・システム(RMR system) AGR 社が開発した,海底にマッド・リフト・ポン プを設置することでマリン・ライザーを設置せずに泥 水循環を行う方法である.海底下では泥水注圧がかか り海底面上は海水中圧となる.泥水循環が可能となる ことにより,20in サーフェスケーシングを使用せずに 13-3/8in ケーシングが設置できるようになった実績が 多い. 本システムは,フレキシブルホース及びポンプの性能 限界により 549m(1800ft)までの水深で使用された が,Shell,BP America 及び DEMO2000(ノルウェ ー政府主導のリサーチプログラム)とジョイントイン ダストリープロジェクトを設立し,技術改良されて
2008 年には 1,419m(4,657ft)の水深でフィールドト ライアルテストが実施されている.
6.3 Controlled Mud level(Pumped Riser System) AGR社がEC Drillとして開発した,マリン・ライザ ーの中間部にマッド・リフト・ポンプを設置して泥水 循環を行い,マリン・ライザー部の泥水注圧を減じる 方法である.Statoil社やPetronas Carigali社が採用 し,減退層や逸泥層の掘削に適用している. 6.4 Seabed Pumping 海底BOP 直上にハイドロリックポンプ,プロセス ユニット,ローテイティング・コントロール・デバイ ス(RCD)を装備することで,坑井から戻ってきた泥 水を海底面からライザーとは異なる別のパイプを通し てリグまで運び上げる.ライザー内は海水が満たされ る.開発当初はポンプの動力に電気式を考えていたが, 長期的な耐久性の問題があるために,ハイドロリック ポンプ(Seawater driven mud lift pump)が採用さ れた.これらの技術開発は大掛かりなもので,上述し た新規装置の開発に加え,海底ポンプを駆動させるた めに,リグ上にNOV 14-P-220 ポンプ 3 台を追加し,
マリン・ライザーには海水を送るための 6in 内径の
Super Duplex ライン及び泥水のリターンラインが追 加されている.Chevron 社は Pacific Drilling 社と組 んで,Drillship を Dual Gradient 対応に改造,又は 新規に建造を実施し,「Pacific Santa Ana」と「Pacific Sharav」が現在メキシコ湾にて 5 年間の長期契約中で ある.
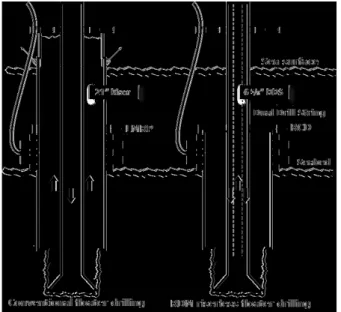
6.5 Reelwell Riserless Drilling Project
マリン・ライザーを使用せず,6-5/8in の Dual Pipe
を使用し,海底部にRCD を設置することで,ドリル
パイプ内で循環を可能にするシステムが研究開発され ている(図7 参照).
マリン・ライザーを必要としないため,大水深におい ても比較的安価なリグで作業可能,必要泥水量が少な いという長所があり,Dual Gradient Drilling も可能 となる.陸上において掘削実績はあるが,未だ海洋で の実績はない. DEMO2000,PETROBRAS 社及び BG Group が本プロジェクトに参画している.
図7 Dual pipe を使用した Dual Gradient(出典:Reelwell 社)
6.6 Pressurized Mud Capped Drilling (PMCD) &Constant Bottom Hole Pressure(CBHP) Dual Gradient Drilling とは若干異なり海洋特有と は限らないが,最近ブラジルでの大水深プレソルトの 掘削で使用されているので紹介する.ジャッキアッ プ・リグではBOP 直上に,セミサブマーシブル・リ グではライザーテンショナー上にストロークジョイン トを外してRCD を設置して,坑井を密閉した状態で 掘削を実施する.PMCD はアニュラスに海水若しくは 軽比重泥水を圧入しながら掘削することで,フラクチ ャー層の掘削に適する.Constant BHP は泥水循環が ない場合も背圧(BP)をかけ,坑底圧を一定に保つこ
とで,Kick と Mud loss が発生する区間の掘削に適す る. 本システムを使用して掘削する場合、RCD 機材 を保有するサービス会社を使用するのが一般的である が,ブラジルの大水深プロジェクトでは,RCD がマ リン・ライザーの一部として組み込まれ,ドリリング コントラクターのサービスの一部(インテグレーティ ド・サービス)として要求されるようである. 7.まとめ 海洋掘削は陸上掘削と比較してデイリーコストが大 きい.それ故,より効率的に掘削しトータル的に探鉱 費用を安くする技術開発が進んでいる.海洋特有,特 に前述した大水深で顕著である掘削問題を解決するに は,既存ハードウェアの大幅な改造が必要となるため, 石油開発会社単独では実現不可能であり,掘削請負会 社,掘削機器製造会社及び掘削サービス会社を含めた ジョイントプロジェクトによって成されているケース
が多い.今後もこの傾向は続くと思われる. 参考文献 1). 石油・天然ガス用語辞典 2). 市川祐一郎,「世界の海洋石油掘削市場の現状, 今後の展望及びJDC 戦略について」JDC 社内講 演
3). MODEC 社 Home page
4). 長縄成実,石油開発時報 No.151(06.11) 最新の 坑井掘削技術(その4)
5). Steve Leverette, Xiaoqiang Bian, Oriol Rijken, Dry Tree Semisubmersibles for Gulf of Mexico, OTC24148
6). Drilling Contractor:2010May/June New deepwater riserless mud recovery system opens door to deepwater dual-gradient drilling | Drilling Contractor
7). Oil& Gas Journal, 05/03/2004 , Surface BOP technology steps into deeper water with DP vessels 8). Wikipedia,Semisubmersible rig 9). Wikipedia,石油プラットフォーム 10). 梅津覚・古谷昭人・市川祐一郎,2006:掘削分野 の技術革新-水深3,000m を克服.石油・天然ガ スレビュー,第40 巻,第 5 号
11). Wikipedia Deepwater Nautilus 著者紹介 姓名 吉田 肇
1960 年生.
日本海洋掘削株式会社 ちきゅう事業所.

![目 次 はじめに 申請や届出に当たっての一般的な注意 土地の掘削や増掘 動力装置の許可申請について [ 温泉を掘削するとき ] [ 温泉を増掘するとき ] 1 4 [ 動力を装置するとき ] 掘削や増掘 動力装置の許可更新申請について 6 [ 掘削 増掘 動力について ] 8 掘削や増掘 動力装置の](data:image/gif;base64,R0lGODlhAQABAIAAAP///wAAACH5BAEAAAAALAAAAAABAAEAAAICRAEAOw==)