推進力方向制御機構をもつ
サイクロジャイロ翼型飛行ロボットの開発
電気通信大学大学院 電気通信学研究科 博士(工学)学位申請論文
東 善之
2010 年 3 月
推進力方向制御機構をもつ
サイクロジャイロ翼型飛行ロボットの開発
博士論文審査委員会
主査 田中 一男 教授
委員 前川 博 教授
委員 横井 浩史 教授
委員 明 愛国 准教授
委員 金森 哉吏 准教授
著作権所有者
東 善之
2010
推進力方向制御機構をもつ
サイクロジャイロ翼型飛行ロボットの開発
東 善之
概 要
近年,Micro Air VehicleやUnmanned Air Vehicleといった飛行ロボットの研究は,飛 行機など既存の機体を利用するものから,新しい形状の機体を開発しているものまで幅広 く行われている.前者の研究では,飛行体の制御に主眼が置かれており,飛行機やヘリコ プタなどの制御やナビゲーションの研究が行われている.
これに対し後者の,機体や機構の開発に主眼が置かれている研究として,1930年代にサ イクロジャイロ翼を持つ飛行体の開発が試みられている.しかし,回転中の翼の迎角を変 化させる機構の実現性が乏しかったため,その飛行は未だ実現されていない.サイクロジ ャイロ翼とは翼面と平行な回転軸周りに回転する翼である.サイクロジャイロ翼を持つ飛 行体はヘリコプタよりも優れた運動性能を発揮でき,ホバリングのみならず機首を上げ(下 げ)ながらの前進(後退)や,真下に向けてのホバリングも可能である.このような飛行 能力は災害救助などの極限状況で優位性を発揮できると考えられる.
本研究室における過去の研究においては,サイクロジャイロ翼の回転時に回転軌道上に おいて発生する力を相殺せず,上方に力を得るための可変迎角機構を提案し,試作機が製 作されている.
本稿では,サイクロジャイロ翼の翼幅,翼枚数,偏心点距離といった機体の設計パラメ ータを実験を通して決定することで性能向上を図る.また,性能向上を行った機体を用い て垂直なガイドに沿った浮上実験を行い,本機構を有する飛行ロボットが浮上可能である ことを示す.その一方で,実験的な設計パラメータの変更では,開発の非効率性が大きな 問題であり,推進効率の向上も必要であることから,機体に働く上昇力及び消費電力を計 算するシミュレーションモデルの開発を行う.そして構築したシミュレーションモデルが,
可変迎角機構のパラメータ変化を含めた実機実験の結果を表現できることを示す.
その後,モデルの精度向上を図り,翼から発生する上昇力を算出するためのモデルを改 善していく.この時,サイクロジャイロ翼のレイノルズ数を考慮し,そのレイノルズ数領 域における揚力・抗力係数を用いることで,以前のモデルと比べ約 12%モデルの精度が向
上することを示す.さらに,向上させたシミュレーションモデルを用いて最適な設計パラ メータを決定することで,これまでの 2 倍以上の上昇力を得る設計パラメータが存在する ことを示す.
また,これまで行われていなかったサイクロジャイロ翼から発生する力の方向の制御機 構を開発する.この機構は,サイクロジャイロ翼が翼の回転に対して,2つの回転中心点を 有していることを利用し,その 2 点の位置関係を変化させることで,力の方向を制御する ものである.特に,翼の回転と2点の位置関係を変化させる制御機構を独立させることで,
翼の回転による反トルクの影響を極力小さくし,小さなサーボモータによる機構の実現を 目指す.そして,製作した実機による実験結果から,発生する力の方向制御機構の有効性 を確認する.本論文は全7章で構成されており,各章の概要は以下の通りである.
第1章では,研究の背景を周辺研究を交え述べるとともに,本研究の沿革,本機構の特 徴,目的について示す.
第2章では,飛行ロボット開発のために採用した可変迎角機構について述べていく.可 変迎角機構は,サイクロジャイロ翼の回転時に回転軌道上において発生する力を相殺せず,
上方に力を得るための機構であり,サイクロジャイロ翼を用いた飛行ロボットを開発する にあたり核となる機構である.
第3章では,サイクロジャイロ翼を用いた推進器の翼幅,翼枚数,偏心点距離といった 設計パラメータを実験的に決定することで性能向上を図る.また,この推進器を飛行ロボ ットへ適用した際の飛行可能性を示すために浮上実験を行う.
第4章では,飛行ロボットの開発効率及び推進効率を高めるために,推進器から発生す る上昇力及び消費電力を計算するシミュレーションモデルの開発を行う.また,構築した シミュレーションモデルが可変迎角機構の設計パラメータを変化させた実験を含め,実機 による実験結果を表現できるモデルであることを示す.
第5章では,前章にて構築したシミュレーションモデルの精度向上を図っていく.この 時,サイクロジャイロ翼のレイノルズ数を考慮し,そのレイノルズ数領域における揚力係 数と抗力係数を用いることで,以前のモデルと比べモデルの精度を約 12%向上させること ができることを示す.さらに,シミュレーションモデルを用いて最適な設計パラメータを 決定することで,第4章における機体の 2 倍以上の上昇力が得られる機体パラメータが存 在することを,実機実験を含めて示す.
第6章では,サイクロジャイロ翼から発生する力の方向の制御機構を開発する.この機 構は,飛行時の姿勢制御,位置制御のために必要不可欠な機構である.サイクロジャイロ 翼を用いた推進器が翼の回転に対して,回転中心点と偏心点と呼ばれる 2 つの回転中心点 を有していることを利用し,その 2 点の位置関係を変化させることで,力の方向を制御す るものである.
最後に,第 7 章では,本研究で得られた成果をまとめるとともに,本飛行ロボットの将 来的な展望について述べる.
Development of Cyclogyro wing based Flying Robot with Thrust Direction Control Mechanism
Yoshiyuki Higashi
Abstract
Nowadays, several flying robots are studied on their information gathering ability and high maneuverability. These studies are categorized into the investigation using existing aircraft such as the helicopter and the development of new flight mechanism like the flutter robot. The former attaches importance to the guidance and the control of aircraft. On the other hand, the latter is focused on the development of the new thruster and the mechanism for flight control. With respect to mechanism of generating lift forces, a unique mechanism, named cyclogyro, was proposed in 1930's.
An airplane with the mechanism was designed at the time. The cyclogyro planned in 1930's is an airplane propelled and given lift by horizontal assemblies of rotating wings.
According to the web site, very few prototypes were built, and those that were constructed were completely unsuccessful.
The essential principle is that the angle of attack of the rotating wings is altered as they go round, allowing the lift/thrust vector to be altered. This allows the airplane to rise vertically, hover, and even go backwards with various attitudes. Thus, cyclogyro-based flying robot has possibility of being a high maneuverability MAV.
This advantage in the flight ability is brought out in the disaster site. To the best of our knowledge, nobody has proposed effective and practical mechanism of altering angles of attack. Thus, there is no record of any successful flights, although the machines of this type have been designed by some companies.
We proposed a new variable attack angle mechanism that is quite simple and effective, and developed a flying robot with the mechanism in past study. In this paper, we demonstrate in some experiments that the change of attack angle provide enough lift force to fly if the parameters (the wing span, the number of wings and the eccentric distance) are appropriately designed. Thus the experiment with the prototype shows that the flying robot with the cyclogyro wing has the ability to hover.
However, due to parameter selection based on experiments, we needed to build another robot, whenever a design parameter was changed. Hence, just only two or three
selections for each design parameter were considered. The approach is quite inefficient from the development effort points of view. For overcoming this problem, the simulation model composed three models called the angle of attack model, the lift force model and the power model are developed. The angle of attack model calculates wing’s angle of attack from the geometric condition of closed link mechanism. The lift force model calculates the lift and the drag generated from wings using the angle of attack calculated from the angle of attack model. And, the power model calculated the electric power of the motor.
But this lift force model does not contain the wing characteristic. Therefore, the model calculates only the lift force using only the force that air pushes the wing. As a result, the constructed lift force model had some error between the simulation results and the experimental results.
For this problem solving, to improve the accuracy of the simulation model, we reconstruct the lift force model by considering the cyclogyro wing's Reynolds number and the aerodynamic characteristic of wings. The utility of the new simulation model is validated by comparing the new simulation model with previous results and experimental results.
On the other hand, the greatest merit of the cyclogyro wing is its maneuverability, that is, it can flight with various attitudes. However, the mechanism of the flight control for the cyclogyro wing is not yet developed. Thus its rotor could not change the direction of the generated force, and it could not control the attitude of the flying robot. We develop the new mechanism for the control of the generated force direction. Its validity is evaluated by the experiment with the prototype.
i
目 次
1 序 論 1
1.1 研 究 の 背 景 . . . . 1
1.2 従 来 の 研 究 . . . . 4
1.3 研 究 の 目 的 . . . . 8
1.4 論 文 の 構 成 . . . . 10
2 可 変 迎 角 機 構 を 有 す る 飛 行 ロ ボット 12 2.1 可 変 迎 角 機 構 . . . . 14
2.2 機 体 構 造 . . . . 15
2.3 飛 行 ロ ボット の 設 計 パ ラ メ ー タ . . . . 18
3 実 験 に 基 づ く 設 計 パ ラ メ ー タ の 選 定 と 浮 上 実 験 20 3.1 予 備 実 験 . . . . 20
3.2 翼 面 積 の 検 討 . . . . 23
3.3 翼 枚 数 の 検 討 . . . . 28
3.3.1 2枚 翼 の 上 昇 力 測 定 実 験 . . . . 29
3.3.2 3枚 翼 の 上 昇 力 測 定 実 験 . . . . 30
3.4 偏 心 距 離 の 検 討 . . . . 32
3.5 浮 上 実 験 . . . . 38
3.6 ま と め . . . . 38
4 シ ミュレ ー ション モ デ ル の 構 築 41 4.1 回 転 に よ る 翼 の 迎 角 算 出 モ デ ル . . . . 42
4.1.1 Case I:0< θ−θp ≤πの 場 合 . . . . 43
4.1.2 Case II:π < θ−θp ≤2πの 場 合 . . . . 44
ii
4.2 上 昇 力 算 出 モ デ ル . . . . 46
4.3 シ ミュレ ー ション モ デ ル の 補 正 係 数 . . . . 50
4.4 シ ミュレ ー ション モ デ ル の 検 証 . . . . 52
4.4.1 翼 面 積 . . . . 52
4.4.2 偏 心 距 離 . . . . 54
4.4.3 偏 心 角 度 . . . . 55
4.4.4 最 適 設 計 パ ラ メ ー タ の 探 索 . . . . 56
4.4.5 考 察 . . . . 60
4.5 消 費 電 力 算 出 モ デ ル の 構 築 . . . . 62
4.5.1 翼 の 抗 力 に よ る 電 力 消 費 . . . . 62
4.5.2 回 転 中 の リ ン ク に よ る 電 力 消 費 . . . . 64
4.5.3 回 転 時 の 摩 擦 に よ る 電 力 消 費 . . . . 66
4.6 消 費 電 力 算 出 モ デ ル の 検 証 と 最 適 パ ラ メ ー タ の 探 索. . . . 67
4.6.1 過 去 の 実 験 値 と の 比 較 . . . . 67
4.6.2 翼 弦 長 の 変 更 に よ る 比 較 . . . . 67
4.6.3 前 節 に お け る 最 適 パ ラ メ ー タ を 使 用 し た 比 較 . . . . 68
4.6.4 消 費 電 力 を 加 味 し た 最 適 パ ラ メ ー タ の 探 索 . . . . 69
4.7 ま と め . . . . 72
5 シ ミュレ ー ション モ デ ル の 精 度 向 上 74 5.1 上 昇 力 シ ミュレ ー ション モ デ ル の 改 善 . . . . 74
5.2 改 善 し た 上 昇 力 算 出 モ デ ル の 検 証 . . . . 77
5.2.1 翼 弦 長 を 変 化 さ せ た 場 合 の 比 較 . . . . 78
5.2.2 偏 心 距 離 を 変 化 さ せ た 場 合 の 比 較 . . . . 79
5.3 最 適 パ ラ メ ー タ の 探 索 . . . . 81
5.4 ま と め . . . . 83
6 推 進 力 の 方 向 制 御 機 構 86 6.1 偏 心 角 制 御 機 構 の 開 発 . . . . 86
6.2 実 機 実 験 に よ る 検 証 . . . . 91
6.2.1 実 験 装 置 . . . . 91
iii
6.2.2 ス テップ 入 力 に 対 す る 力 の 応 答 . . . . 92
6.2.3 サ イ ン 波 入 力 に 対 す る 力 の 応 答 . . . . 92
6.3 1点 支 持 状 態 で の 姿 勢 安 定 化 実 験 . . . . 94
6.3.1 実 験 装 置 . . . . 94
6.3.2 実 験 結 果 . . . . 96
6.4 ま と め . . . . 97
7 ま と め と 今 後 の 展 望 99 7.1 ま と め . . . . 99
7.2 今 後 の 展 望 . . . . 101
参 考 文 献 104
謝 辞 108
iv
図 目 次
1.1 Amphibious snake like robot.(Hirose lab., Tokyo Institute of Technology)[9] 2 1.2 Underwater vehicle with variable configuration segmented wheels.(Iwamoto
lab., Ryukoku University)[10] . . . . 2
1.3 Category of aircrafts. . . . . 2
1.4 Small ornithopter ”DelFly”.(the Delft University of Technology)[23] . . . . 3
1.5 Cyclogyro-based airplane planed in 1930s [24]. . . . . 4
1.6 Vioth schneider propeller.[26] . . . . 5
1.7 Locomotion capability of VCSW. . . . . 6
1.8 First prototype of flying robot with cyclogyro wing. . . . . 7
1.9 Generated force by rotating wings. . . . . 8
2.1 Mechanism of multi-parallel link rotor.[32] . . . . 13
2.2 Variable attack angle mechanism (Overview). . . . . 14
2.3 Variable attack angle mechanism (Detailed view). . . . . 15
2.4 Single rotor helicoper’s mechanism for canceling Anti-torque. . . . . 16
2.5 Counter propeller helicoper’s mechanism for canceling Anti-torque. . . . . 16
2.6 Tandem rotor helicoper’s mechanism for canceling Anti-torque. . . . . 16
2.7 Cyclogyro-based flying robot with 4 rotors. . . . . 17
2.8 Comparison of flight attitude between helicopter and cyclogyro wing. . . . 18
3.1 Experimental system with strain gauge.[28] . . . . 20
3.2 Experimental system with platform scale. . . . . 21
3.3 Measuring results of preliminary experiment. . . . . 23
3.4 Force generated by a wing. . . . . 24
3.5 Comparison normal wing model with double wing span model. . . . . 25
v
3.6 Nylon string at wing-tip . . . . 25
3.7 Comparison of lift force between normal wing and double wing span model. 27 3.8 Comparison of lift force / weight ratio between normal wing and double wing span model. . . . . 27
3.9 4 wings model, 3 wings model and 2 wings model. . . . . 28
3.10 Tedency of lift force generated from 2, 3 and 4 wings model. . . . . 30
3.11 Lift force / weight raio of 3 wings model. . . . . 32
3.12 Closed link mechanism. . . . . 33
3.13 Difference of angle of attack for eccentric distances. . . . . 34
3.14 Lift/Weight ratio of experimental resules with 3 kind of eccentric distance model. . . . . 37
3.15 Hovering experiment along vertical guide.. . . . 40
4.1 Lift force and power simulation model flow. . . . . 42
4.2 Case I (0< θ−θp ≤π). . . . . 43
4.3 Case II (π < θ−θp ≤2π). . . . . 44
4.4 Attack angles for rotation angle. . . . . 45
4.5 Lift coefficient of NACA0012. . . . . 46
4.6 Drag coefficient of NACA0012.. . . . 48
4.7 Lift calculated using characteristic coefficients. . . . . 48
4.8 Lift calculated from pressure of wings. . . . . 49
4.9 Experimental result using test model. . . . . 49
4.10 Lift coefficients of flat plate in steady condition and pitching motion. . . . 50
4.11 Drag coefficients of flat plate in steady condition and pitching motion. . . . 51
4.12 Single and double chord wings. . . . . 53
4.13 Comparison between single and double chord wings (simulation and exper- imental results). . . . . 53
4.14 Simulation results for some eccentric distances.. . . . 54
4.15 Experimental results for some eccentric distances. . . . . 55
4.16 Simulation and experimental results for some eccentric angles. . . . . 56
vi
4.17 Lift force for eccentric deisrtance and angles. . . . . 58
4.18 Flying robot with optimized parameters. . . . . 59
4.19 Comparison between present and optimized models (simulation and exper- imental results). . . . . 59
4.20 Deflection of wings. . . . . 60
4.21 Downwash in rotational motion. . . . . 61
4.22 Drag force of rotating wings . . . . 63
4.23 Drag force of rotating links. . . . . 65
4.24 Power of rotational friction. . . . . 66
4.25 Power for some frequency (simulation and experimantal results). . . . . 68
4.26 Comparison between single and double chord wings (simulation and exper- imental results). . . . . 69
4.27 Power for some frequency with optimized model(simulation and experimen- tal results). . . . . 70
4.28 Lift force for power in optimized parameters. . . . . 72
5.1 Lift coefficient of flat plate in Re=10000. . . . . 75
5.2 Drag coefficient of flat plate in Re=10000. . . . . 76
5.3 Change of virtical force for rotational angle. . . . . 77
5.4 Comparison between wing chord 50mm wing and 100mm wing.. . . . 78
5.5 Experiment and simulation results calcurated from new simulation model.. 80
5.6 Experiment and simulation results calcurated from previous simulation model. . . . . 80
5.7 Comparison between lift force of optimal model and previous model. . . . . 82
5.8 Comparison between lift coefficient of flat plate based on experiment and lift coefficient in chapter 4. . . . . 84
5.9 Comparison between drag coefficient of flat plate based on experiment and drag coefficient in chapter 4. . . . . 85
6.1 Control mechanism of Voith Schneider Propeller.[26]. . . . 87
6.2 Force direction control with hub ring. . . . . 87
vii
6.3 Design and prototype of force direction control mechanism. . . . . 89
6.4 Developed prototype and definition of x, y and z-axis on 3D piezoelectric force sensor. . . . . 91
6.5 Experimental system for validation. . . . . 92
6.6 Response of force direction to step input. . . . . 93
6.7 Response of force direction to sine curve input.. . . . 93
6.8 4 rotors model with force direction control mechanism. . . . . 95
6.9 Connector consited of universal joint and ball bearing. . . . . 95
6.10 3D motion sensor composed of gyro sensor, acceleration sensor and geo- magnetic sensor.. . . . 96
6.11 3D motion sensor on cushioning material.. . . . 96
6.12 Results of attitude control experiment. . . . . 97
7.1 First design of flying robot with leg.. . . . 102
7.2 New design of flying robot with leg. . . . . 102
7.3 Multi-field mobile robot with cyclogyro wing.(flight mode) . . . . 103
7.4 Multi-field mobile robot with cyclogyro wing.(running mode) . . . . 103
7.5 Multi-field mobile robot with cyclogyro wing.(underwater mode) . . . . 103
viii
表 目 次
3.1 Preliminary experimental results with platform scale. . . . . 22
3.2 Experimental results with double wing span model. . . . . 26
3.3 Experimental results with 2 wings model. . . . . 29
3.4 Experimental results with 3 wings model. . . . . 31
3.5 Experimental results with enncentric distance 12.5mm model. . . . . 35
3.6 Experimental results with enncentric distance 20mm model. . . . . 36
3.7 Experimental results with enncentric distance 25mm model. . . . . 36
3.8 Experimental results with enncentric distance 35mm model. . . . . 37
4.1 Compensation of lift and drag coefficients. . . . . 51
4.2 Eccentric angles at maximum and minimum lift force. . . . . 56
4.3 Comparison of design parameters in present model and optimized model. . 58
4.4 Optimized parameters calculated from simulation model without power model and include power model. . . . . 71
5.1 Comparison of evaluation function J in Fig.5.4. . . . . 79
5.2 Comparison of evaluation function J in Fig.5.5and Fig.5.6. . . . . 79
5.3 Design parameters of previous model and optimized parameters calculated from simulation model. . . . . 81
1
第 1 章 序論
1.1 研 究 の 背 景
近 年 ,ア ク チュエ ー タ や セ ン サ の 小 型 化 ,軽 量 化 に 伴 い ,人 間 型 ,昆 虫 型 の と いった 脚 を 持 つ も の[1, 2, 3]か ら ,車 両 や 飛 行 体 を ベ ー ス と し て 自 律 制 御 可 能 に し た も の[4, 5]ま で 多 種 多 様 な 移 動 ロ ボット が 開 発 さ れ て い る .搭 乗 者 を 必 要 と し な い 移 動 ロ ボット で は 操 縦 者 の 安 全 が 確 保 さ れ る た め ,陸 上 は も と よ り 空 中 ,水 中 と いった フィー ル ド で も 運 用 が 可 能 で あ り,ロ ボット の 大 き さ や 形 状 の 制 約 も 少 な い た め ,瓦 礫 の 下 や 壁 面 の 移 動 を も 可 能 と し て い る .こ れ ら の 一 例 と し て ,亀 川 ,松 野 に よ る レ ス キュー ロ ボット の 研 究[6, 7]
や ,三 宅 に よ る 窓 清 掃 ロ ボット の 研 究[8]な ど が 挙 げ ら れ る .ま た ,広 瀬 ら の 開 発 し た 蛇 型 ロ ボット[9]や ,岡 田 ら の 開 発 し た 可 変 翼 車 輪 を 用 い た 移 動 ロ ボット[10]で は ,1種 類 の 移 動 機 構 で 陸 上 と 水 中 両 方 の 移 動 に 成 功 し て い る .
空 中 を 移 動 す る 飛 行 ロ ボット は 地 上 を 俯 瞰 し ,広 い 範 囲 に わ た り 情 報 収 集 を 行 う こ と が で き る 点 や ,空 中 は 移 動 の 障 害 と な る も の が 少 な く,移 動 範 囲 が 広 い 点 な ど の メ リット か ら 研 究 が 行 わ れ て い る .そ の 対 象 と さ れ る 航 空 機 や 飛 行 体 はFig.1.3に 示 す よ う に ,揚 力 の 発 生 原 理 や ,動 力 の 有 無 に よって 分 類 す る こ と が で き る .軽 航 空 機(Lighter than aircraft)は 機 体 を 浮 上 さ せ る た め の 揚 力 を ,袋 状 の 気 嚢 に 空 気 よ り も 軽 い ヘ リ ウ ム な ど の 気 体 を 入 れ る こ と で 生 じ さ せ て お り,飛 行 船 や 気 球 が 含 ま れ て い る .ま た ,重 航 空 機(Heavier than aircraft)に は ,機 体 に 取 り 付 け た 翼 が 対 気 速 度 を 持 つ こ と で 揚 力 を 生 じ る 飛 行 機 や グ ラ イ ダ,ブ レ ー ド と 呼 ば れ る 翼 を 回 転 さ せ 揚 力 を 得 る ヘ リ コ プ タ,オ ー ト ジャイ ロ な ど が 含 ま れ る .さ ら に ,機 体 に 固 定 さ れ た 翼 を 持 ち な が ら 垂 直 離 着 陸 ,短 距 離 着 陸 が 可 能 なVTOL機(Virtical takeoff and landing) やSTOL機(Short takeoff and landng)も 重 航 空 機 に 含 ま れ る .
第1章 序 論
2
Fig. 1.1:Amphibious snake like robot.(Hirose lab., Tokyo Institute of Technology)[9]
Fig. 1.2:Underwater vehicle with variable configuration segmented wheels.(Iwamoto lab., Ryukoku University)[10]
Aircraft
Lighter than air aircraft
Heavier than air aircraft
Balloon Air ship Fixed wing aircraft Bladed aircraft
VTOL/STOL aircraft
Glider Airplane Helicopter Autogyro
Fig. 1.3:Category of aircrafts.
第1章 序 論
3
Fig. 1.4:Small ornithopter ”DelFly”.(the Delft University of Technology)[23]
飛 行 ロ ボット 分 野 の 研 究 は 飛 行 機 や ヘ リ コ プ タ[11, 12, 13] の よ う に 既 存 の 機 体 を 利 用 す る も の か ら ,新 し い 形 状 の 機 体 を 開 発 し て い る も の ま で 幅 広 く 行 わ れ て い る .前 者 の 研 究 は 既 存 の 機 体 を 利 用 し て い る こ と か ら 飛 行 ロ ボット の 誘 導 ,制 御 に 主 眼 が 置 か れ て い る の に 対 し て ,後 者 は 機 体 や 機 構 そ の も の の 開 発 に 主 眼 が 置 か れ て い る .前 者 の 研 究 と し て は ,飛 行 機 や ヘ リ コ プ タ 以 外 に 飛 行 船[14, 15]の 制 御 や ナ ビ ゲ ー ション の 研 究 が 行 わ れ て い る . ま た 、DARPA(The Defense Advanced Research Projects Agency) [16, 17]に よ るMicro Air VehicleやUnmanned Air Vehicleに 関 す る 研 究 が よ く 知 ら れ て い る .
後 者 の 研 究 と し て ,鳥 や 昆 虫 の 動 き を 模 範 と し た 羽 ば た き 翼 に 関 す る 研 究[19, 20, 21, 22]が 数 多 く さ れ て い る. 中 で もBart Remesら の 開 発 し た 羽 ば た き 翼 ロ ボット[23]は ,翼 幅10cm,重 量3.07gと 小 型 な 機 体(Fig.1.4)で あ り な が ら , カ メ ラ を 搭 載 し て の 飛 行 を 可 能 と し て い る.
飛 行 の た め の 新 た な 機 構 と し て ,1930年 代 に サ イ ク ロ ジャイ ロ 翼 を 持 つ 飛 行 体(Fig.1.5)の 開 発[24]が 試 み ら れ て い る .サ イ ク ロ ジャイ ロ 翼 と は ,ボ ー ト の パ ド ル の よ う に 翼 面 と 平 行 な 回 転 軸 周 り に 翼 を 回 転 さ せ 推 進 力 を 得 る 回 転 翼 で あ る .単 純 に 翼 を 回 転 さ せ た 場 合 に は ,回 転 軌 道 上 に 生 じ る 力 は 回 転 中 心 点 を 中 心 と し て 対 称 と な り,互 い に 力 を 相 殺 し て し ま う た め ,発 生 す る 力 の 総 和 は0と な り 推 進 力 を 得 る こ と は で き な い. サ イ ク ロ ジャイ ロ 翼 が 提 案 さ れ た 当 時 は ,回 転 中 の 翼 の 迎 角 を 変 化 さ せ る 機 構 の 実 現 性 が 乏 し
第1章 序 論
4
かった た め ,そ の 推 進 力 の み に よ る 飛 行 は 実 現 さ れ て い な い .
サ イ ク ロ ジャイ ロ 翼 を も つ 飛 行 体 は ホ バ リ ン グ の み な ら ず 機 体 を 傾 け て の 並 進 飛 行 が 可 能 で あ り,ヘ リ コ プ タ よ り も 優 れ た 運 動 性 能 を 発 揮 で き る と い う 考 え か ら ,サ イ ク ロ ジャイ ロ 翼 を 有 す る 飛 行 ロ ボット に 関 す る 研 究 [27]-[29]が 過 去 に 行 わ れ て い る .優 れ た 運 動 性 能 の 一 例 と し て ,機 首 を 上 げ
( 下 げ )な が ら の 前 進( 後 退 )は も と よ り,機 首 を 真 下 に 向 け て の ホ バ リ ン グ ま で 可 能 で あ る .こ の よ う に ,サ イ ク ロ ジャイ ロ 翼 を 有 す る 飛 行 ロ ボット は ヘ リ コ プ タ よ り も 多 く の 飛 行 姿 勢 を と る こ と が 可 能 で あ り,災 害 救 助 な ど の 極 限 状 況 で そ の 優 位 性 を 発 揮 で き る .
Fig. 1.5:Cyclogyro-based airplane planed in 1930s [24].
1.2 従 来 の 研 究
サ イ ク ロ ジャイ ロ 翼 を 飛 行 に 用 い る こ と は ,優 れ た 運 動 性 へ の 期 待 か ら , 1930年 代 に 提 案 さ れ た .し か し ,ロ ー ル バッハ 試 験 機(翼 車 径3.6m,翼 幅4.2m, 翼 弦0.3m)や ス ト ラ ン グ レ ン 試 験 機(翼 車 径5.5m,翼 幅2.8m, 翼 弦0.28m)な ど が 試 み ら れ た も の の ,回 転 中 の 翼 の 迎 角 を 変 化 さ せ る た め の 機 構 と し て 実 用 的 な も の が 開 発 さ れ ず,そ の 飛 行 は 実 現 さ れ て い な い .2005年 の 日 本 国 際 博
第1章 序 論
5
覧 会(通 称:愛 知 万 博)で は ,サ イ ク ロ ジャイ ロ 翼 を 推 進 用 に 用 い た 飛 行 船 の 紹 介 も 行 わ れ た. 恩 田 ら が 開 発 し た こ の 飛 行 船 で は サ イ ク ロ イ ダ ル プ ロ ペ ラ と 呼 ば れ て お り,機 体 の 浮 上 の た め の 揚 力 を 気 嚢 の 静 的 揚 力 に よって 生 じ さ せ ,推 進 用 に サ イ ク ロ ジャイ ロ 翼 を 搭 載 す る こ と で ,回 転 半 径 方 向 の ど の 方 向 に も 推 進 力 を 向 け る こ と が で き ,宙 返 り 飛 行 な ど の ア ク ロ バット 飛 行 を 可 能 と し て い る.
そ の 一 方 で ,サ イ ク ロ ジャイ ロ 翼 はFig. 1.6に あ る よ う な フォイ ト シュナ イ ダ プ ロ ペ ラ と 呼 ば れ る 推 進 機 と し て 船 舶 に 利 用 さ れ て い る[25, 26].フォイ ト シュナ イ ダ プ ロ ペ ラ は ,サ イ ク ロ ジャイ ロ 翼 の 特 長 か ら ス ク リュー に 比 べ 方 向 を 容 易 に 変 え る こ と が で き る た め ,港 内 艇 や 作 業 船 な ど に 利 用 さ れ て い る .
Fig. 1.6:Vioth schneider propeller.[26]
第1章 序 論
6
on flat surface object climbing
on maddy road on water
Fig. 1.7:Locomotion capability of VCSW.
ま た ,前 節 に て 挙 げ た 岡 田 ら の 可 変 翼 車 輪(VCSW:Variable Configuration Segmented Wheel)も ,サ イ ク ロ ジャイ ロ 翼 と 同 様 の 機 構 を 用 い た も の で あ る. 可 変 翼 車 輪 は 車 輪 の リ ム を い く つ か の 翼 に 分 割 し ,翼 の 一 端 を 回 転 支 持 し て ,車 輪 の 回 転 と と も に こ の 翼 が 特 定 の 方 向 に 周 期 的 に 展 開 及 び 収 納 す る 機 構 と なって い る .全 周 に 翼 を 展 開 す る 機 構 と 異 な り,Fig.1.7に 図 示 さ れ る よ う に 車 輪 下 部 で は 翼 を 収 納 す る こ と も で き ,路 面 走 行 に お い て 影 響 を 与 え ず,高 速 走 行 が 可 能 で あ る と し て い る .ま た ,斜 面 に お い て は 翼 の エッジ を 斜 面 に 立 て る こ と で す べ り を 防 ぎ ,泥 濘 地 で は 翼 に よ る 押 し 下 げ 効 果 に よ り 車 体 の 沈 下 を 防 ぐ.そ し て ,水 上 で は 翼 を 下 方 に 展 開 す る こ と で 推 進 力 を 発 生 さ せ る と い う も の で あ る .
サ イ ク ロ ジャイ ロ 翼 の よ う な 水 平 軸 型 回 転 翼 は ,翼 回 転 時 に 翼 の 迎 角 を 変 化 さ せ な い 場 合 ,回 転 軌 道 上 で 発 生 す る 力 を 相 殺 し て し ま う た め ,推 進 力 を 得 る こ と は で き な い. 本 研 究 室 で は ,こ れ ま で に サ イ ク ロ ジャイ ロ 翼 に よ る 飛 行 実 現 の た め ,回 転 時 に 回 転 軌 道 の 上 下 に お い て 発 生 す る 力 の ベ ク ト ル を 相 殺 せ ず,上 方 に 力 を 得 る た め の 機 構 を 用 い て ,Fig.1.8に 示 す よ う な 飛
第1章 序 論
7
行 ロ ボット1号 機[27]を 製 作 し た .こ の 機 構 は 回 転 軌 道 上 で 生 じ る 力 の 総 和 を 上 昇 力 方 向 へ 生 じ さ せ る た め に ,翼 の 回 転 時 に 翼 の 迎 角 を 変 化 さ せ る こ と が で き る 可 変 迎 角 機 構 で あ る. 可 変 迎 角 機 構 の 詳 細 に つ い て は 次 章 に て 述 べ る. ま た ,飛 行 ロ ボット1号 機 よ り も 翼 面 積 の 大 き な 翼 を 使 用 し た 飛 行 ロ ボッ ト2号 機[28]を 開 発 し ,約43gfの 上 昇 力 を 得 た .し か し な が ら ,こ の 時 の 機 体 重 量178gに 対 し て24%程 度 の 力 で あ り,推 進 力 が 発 生 し て い る こ と は 確 認 さ れ た も の の ,十 分 な 推 進 力 で は な い .ま た ,片 も ち は り と ひ ず み ゲ ー ジ で の 簡 単 な 計 測 シ ス テ ム で あった た め に 計 測 精 度 に 疑 問 が 残 る 結 果 と なった .
Fig. 1.8:First prototype of flying robot with cyclogyro wing.
第1章 序 論
8 1.3 研 究 の 目 的
フォイ ト シュナ イ ダ プ ロ ペ ラ や サ イ ク ロ ジャイ ロ 翼 の よ う な ,翼 面(ブ レ ー ド 面)と 翼 の 回 転 軸 が 平 行 な 推 進 器 で は ,Fig.1.9に 示 す よ う に 回 転 軌 道 上 の 全 て の 翼 が 推 進 方 向 の 仕 事 に 寄 与 す る わ け で は な い. 通 常 の ス ク リュー や プ ロ ペ ラ の よ う な ,翼 と 回 転 軸 が 垂 直 な 推 進 器 で は 全 て の 翼 が 均 等 に 推 進 力 を 生 じ て い る た め ,こ れ ら と 比 較 し た 場 合 に 水 平 軸 型 回 転 翼 の 推 進 効 率 が 劣 る 一 因 と なって い る. し か し な が ら ,推 進 力 を 回 転 軸 周 り の 任 意 の 方 向 へ 向 け る こ と が 可 能 で あ る こ と や ,回 転 軸 と 翼 面 が 平 行 で あ る こ と か ら ,可 変 翼 車 輪 の よ う に 同 一 の 機 構 で 地 上 や 水 中 と いった 異 な る フィー ル ド も 移 動 で き る 可 能 性 を 有 し て い る こ と な ど の メ リット を 持って い る. こ の メ リット 活 か す こ と で ,ヘ リ コ プ タ な ど 既 存 の 飛 行 体 よ り も 自 由 度 の 高 い 飛 行 姿 勢 を と る こ と が で き ,優 れ た 飛 行 が 可 能 に な る も の と 考 え ,著 者 ら は サ イ ク ロ ジャイ ロ 翼 を 持 つ 飛 行 体 の 開 発 を 行って い る.
‑0.08 ‑0.06 ‑0.04 ‑0.02 0 0.02 0.04 0.06 0.08
‑0.08
‑0.06
‑0.04
‑0.02 0 0.02 0.04 0.06 0.08
Fig. 1.9:Generated force by rotating wings.
こ れ ま で に 開 発 さ れ た 飛 行 ロ ボット2号 機[28]に お い て は ,飛 行 の た め に は
第1章 序 論
9
推 進 力 が 不 足 し て お り,推 進 効 率 の 向 上 が 望 ま れ る .そ こ で ,サ イ ク ロ ジャ イ ロ 翼 の 設 計 パ ラ メ ー タ を 実 機 実 験 を 通 し て 選 定 す る こ と で ,自 重 比 に し て100%を 上 ま わ る 上 昇 力 を 得 る こ と を 目 的 と す る .そ し て ,そ の 設 計 パ ラ メ ー タ を 用 い た 機 体 を 使 用 す る こ と で ,本 機 構 を 有 す る 飛 行 体 の 浮 上 が 可 能 で あ る こ と を 示 す.
ま た ,実 験 に 基 づ く 設 計 パ ラ メ ー タ の 変 更 で は ,変 更 の た び に 異 な る パ ー ツ を 使 用 し た 機 体 の 製 作 が 必 要 と な る .よって ,開 発 効 率 を 高 め る た め に , 機 体 に 働 く 上 昇 力 を 計 算 す る シ ミュレ ー ション モ デ ル を 開 発 す る .そ の 後 , 本 論 文 で 構 築 し た シ ミュレ ー ション モ デ ル が 可 変 迎 角 機 構 の 設 計 パ ラ メ ー タ の 変 更 実 験 を 含 め た 実 験 結 果 を 表 現 で き る モ デ ル で あ る こ と を 示 す.
構 築 し た シ ミュレ ー ション モ デ ル を 用 い て 最 適 な 設 計 パ ラ メ ー タ を 探 索 す る こ と で ,約20%の 上 昇 力 の 向 上 が 可 能 で あ る こ と を 明 ら か に し ,実 機 実 験 を 通 し そ の 有 効 性 を 確 認 す る .ま た ,上 昇 力 を 算 出 す る シ ミュレ ー ション モ デ ル よ り 得 ら れ た 翼 の 抗 力 を 考 慮 す る こ と で ,翼 回 転 時 の モ − タ に お け る 消 費 電 力 を 算 出 す る モ デ ル の 構 築 も 行 な う.こ の モ デ ル に 対 し て も 実 機 実 験 と の 比 較 を 行 う こ と で 有 効 性 の 検 証 を 行 な う.さ ら に 構 築 し た 消 費 電 力 モ デ ル を 導 入 し た 場 合 の 最 適 パ ラ メ ー タ を 探 索 し ,消 費 電 力 モ デ ル を 含 ま な い 場 合 の パ ラ メ ー タ と の 比 較 を 行 な う.
上 記 の 目 的 は ,機 体 の 推 進 効 率 ,開 発 効 率 の 向 上 と い う こ と を 目 的 と し て い る が ,飛 行 ロ ボット と し て 飛 行 さ せ る に は ,飛 行 制 御 機 構 の 開 発 が 必 要 で あ る .そ こ で ,本 稿 に お い て 飛 行 時 の 姿 勢 制 御 ,位 置 制 御 に 必 要 で あ る ,推 進 力 の 方 向 を 制 御 す る た め の 機 構 を 開 発 す る .こ の 飛 行 制 御 機 構 で は ,本 稿 で 用 い て い る 可 変 迎 角 機 構 に お い て は2つ の 回 転 中 心 点 の 位 置 関 係 に よっ て ,力 の 向 き を 制 御 す る こ と が 可 能 で あ る と い う 特 徴 を 生 か し ,軽 量 化 の た め に 小 さ な サ ー ボ モ ー タ を 使 用 し た 機 構 と す る こ と を 目 的 と す る .
第1章 序 論
10 1.4 論 文 の 構 成
本 研 究 で は 過 去 の 研 究 に お い て 提 案 さ れ た ,可 変 迎 角 機 構 を 有 す る サ イ ク ロ ジャイ ロ 型 飛 行 ロ ボット の モ デ ル 化 を 行 い ,構 築 し た モ デ ル の 妥 当 性 の 検 証 ,実 機 実 験 の 結 果 と の 比 較 を 行 う.さ ら に 構 築 し た モ デ ル を 用 い て 飛 行 ロ ボット の 性 能 向 上 を 図 る .本 論 文 は 本 章 を 含 め 全7章 で 構 成 さ れ て お り,
各 章 の 概 要 は 以 下 の 通 り で あ る .
第 2 章 で は ,飛 行 ロ ボット 開 発 の た め に 採 用 し た 可 変 迎 角 機 構 に つ い て 述 べ る .可 変 迎 角 機 構 は ,サ イ ク ロ ジャイ ロ 翼 の 回 転 時 に 回 転 軌 道 上 に お い て 発 生 す る 力 を 相 殺 せ ず,浮 上 す る 力 を 得 る た め の 機 構 で あ り,サ イ ク ロ ジャ イ ロ 翼 を 用 い た 飛 行 ロ ボット を 開 発 す る に あ た り 中 心 と な る 機 構 で あ る
第 3 章 で は ,サ イ ク ロ ジャイ ロ 翼 を 用 い た 推 進 器 の 翼 幅 ,翼 枚 数 ,偏 心 点 距 離 と いった 設 計 パ ラ メ ー タ を 実 験 的 に 決 定 す る こ と で 性 能 向 上 を 図 る .ま た ,こ の 推 進 器 を 飛 行 ロ ボット へ 適 用 し た 際 の 飛 行 可 能 性 を 示 す た め に 浮 上 実 験 を 行 う.
第 4 章 で は ,飛 行 ロ ボット の 開 発 効 率 及 び 推 進 効 率 を 高 め る た め に ,推 進 器 か ら 発 生 す る 上 昇 力 及 び 消 費 電 力 を 計 算 す る シ ミュレ ー ション モ デ ル の 開 発 を 行 う.ま た ,構 築 し た シ ミュレ ー ション モ デ ル が 可 変 迎 角 機 構 の 設 計 パ ラ メ ー タ を 変 化 さ せ た 実 験 を 含 め ,実 機 に よ る 実 験 結 果 を 表 現 で き る モ デ ル で あ る こ と を 示 す.
第 5 章 で は ,前 章 に て 構 築 し た シ ミュレ ー ション モ デ ル の 精 度 向 上 を 図 る . こ こ で は ,精 度 向 上 の た め に 回 転 中 の 翼 か ら 発 生 す る 上 昇 力 を 算 出 す る た め の モ デ ル を 改 善 す る .こ の 時 ,サ イ ク ロ ジャイ ロ 翼 の レ イ ノ ル ズ 数 を 考 慮 し ,そ の レ イ ノ ル ズ 数 領 域 に お け る 揚 力 係 数 と 抗 力 係 数 を 用 い る こ と で , 以 前 の モ デ ル と 比 べ モ デ ル の 精 度 を 約15% 向 上 さ せ る こ と が で き る こ と を 示 す.さ ら に ,シ ミュレ ー ション モ デ ル を 用 い て 最 適 な 設 計 パ ラ メ ー タ を 決 定 す る こ と で ,こ れ ま で の 約2倍 の 上 昇 力 が 得 ら れ る 機 体 パ ラ メ ー タ が 存 在 す る こ と を ,実 機 実 験 を 含 め て 示 す.
第 6 章 で は ,サ イ ク ロ ジャイ ロ 翼 か ら 発 生 す る 力 の 方 向 の 制 御 機 構 を 開 発 す る .こ の 機 構 は ,飛 行 時 の 姿 勢 制 御 ,位 置 制 御 の た め に 必 要 不 可 欠 な 機
第1章 序 論
11
構 で あ る .サ イ ク ロ ジャイ ロ 翼 を 用 い た 推 進 器 が 翼 の 回 転 に 対 し て ,回 転 中 心 点 と 偏 心 点 と 呼 ば れ る2つ の 回 転 中 心 点 を 有 し て い る こ と を 利 用 し ,そ の2点 の 位 置 関 係 を 変 化 さ せ る こ と で ,力 の 方 向 を 制 御 す る も の で あ る .開 発 し た 制 御 機 構 は 実 機 に よ る 実 験 を 通 し て ,推 進 器 か ら 発 生 す る 力 の 方 向 が 制 御 さ れ て い る こ と を 確 認 す る .ま た ,4つ の ロ ー タ と 開 発 し た 制 御 機 構 を 搭 載 し た 機 体 を 用 い て ,1点 支 持 状 態 で の 姿 勢 安 定 化 実 験 を 実 施 す る .
最 後 に ,第7章 で は ,本 研 究 で 得 ら れ た 成 果 を ま と め る と と も に ,本 飛 行 ロ ボット の 将 来 的 な 展 望 に つ い て 述 べ る .
12
第 2 章
可変迎角機構を有する飛行ロボット
序 論 に て 挙 げ た サ イ ク ロ ジャイ ロ 翼 を 始 め と す る 水 平 軸 型 回 転 翼 で は ,翼 の 回 転 中 に そ の 迎 角 を 変 化 さ せ る こ と が で き な い 場 合 ,回 転 軌 道 上 で 各々 の 方 向 に 発 生 す る 力 は 相 殺 さ れ て し ま い ,上 昇 ,推 進 す る 力 を 得 る こ と は で き な い. こ の 問 題 を 解 決 す る た め に ,回 転 中 の 翼 の 迎 角 を 変 化 さ せ る ,回 転 と と も に 翼 面 積 を 変 化 さ せ る な ど の 手 法 が 必 要 と な る.
翼 回 転 時 に 翼 の 迎 角 を 変 化 さ せ る 可 変 迎 角 機 構 と し て ,本 稿 で は1枚 の 翼 に 対 し て2本 の リ ン ク を 繋 ぎ ,そ れ ぞ れ の リ ン ク が 異 な る2つ の 回 転 中 心 点 を 持った 閉 リ ン ク 機 構 を 用 い る こ と で ,翼 に 対 し て ピッチ ン グ 方 向 の 往 復 運 動 を 与 え て い る .こ の 機 構 の 原 理 は ,恩 田 ら の サ イ ク ロ イ ダ ル プ ロ ペ ラ [30, 31]で も 使 用 さ れ て お り,翼 後 方 を 支 え る リ ン ク が 回 転 で き る よ う に 接 続 さ れ た ス リップ リ ン グ の 中 を ,翼 前 方 の リ ン ク を 回 転 さ せ る 駆 動 軸 が 通 る 構 造 で ,翼 の 駆 動 軸 中 心 と ス リップ リ ン グ の 中 心 を2つ の 回 転 中 心 点 と し て い る .
長 谷 川 ら の 開 発 し た マ ル チ 平 行 リ ン ク 回 転 翼[32]に お い て は ,翼 の 回 転 周 期 に 対 し て ,そ の 半 分 の 周 期 の 自 転 運 動 を 翼 へ 与 え る 機 構 も 提 案 さ れ て い る. マ ル チ 平 行 リ ン ク 回 転 翼 で はFig.2.1 に 示 す よ う に ,回 転 中 心 か ら 翼 に 向 け て メ イ ン リ ン ク が つ い て お り,メ イ ン リ ン ク 長 と サ ブ リ ン ク 長 は 等 し く なって い る .回 転 中 心 に は ク ラ ン ク リ ン ク が つ い て お り,メ イ ン リ ン ク,サ ブ リ ン ク,翼 ,ク ラ ン ク リ ン ク の 4 つ の 要 素 で 平 行 リ ン ク 機 構 が 成 り 立って い る .
こ の 機 構 に お い て メ イ ン リ ン ク を 固 定 し ,ク ラ ン ク リ ン ク の み を 回 転 さ せ た 場 合 に は ,ク ラ ン ク リ ン ク の 回 転 運 動 に 合 わ せ て ,サ ブ リ ン ク で つ な が れ た 翼 も 自 転 運 動 す る こ と と な る .メ イ ン リ ン ク を 回 転 さ せ た 場 合 に は 翼 は 公 転 運 動 を す る こ と と な る た め ,メ イ ン リ ン ク と と も に ク ラ ン ク リ ン
第2章 可 変 迎 角 機 構 を 有 す る 飛 行 ロ ボット
13
lm
L D
Wing Sub-link
Main-link
Main axis Crank-link
Fig. 2.1:Mechanism of multi-parallel link rotor.[32]
ク を 回 転 さ せ る こ と に よって ,翼 は 公 転 運 動 と 自 転 運 動 の 両 方 を 伴 う 運 動 を す る こ と と な る. こ の 機 構 を 用 い た 実 験 機 も 開 発 さ れ ,機 体 の 浮 上 も 確 認 さ れ て い る.[33]
ま た ,翼 運 動 時 に 翼 の 迎 角 が 変 化 す る 必 要 性 は ,羽 ば た き 翼 に お い て も 同 様 の こ と が 言 え る. 昆 虫 の 羽 ば た き を 模 し た 小 型 羽 ば た き 機 の 開 発 を 行っ て い る 文 献[20]で は ,ピ エ ゾ 素 子 を 用 い て 羽 ば た き 運 動 を 翼 に 与 え る と 同 時 に ,翼 の 付 け 根 部 に 回 転 の 自 由 度 を 与 え る こ と で ,羽 ば た き な が ら 翼 の 迎 角 が 変 化 す る 機 構 と なって い る .こ の 翼 の 回 転 に よって 得 ら れ る 迎 角 変 化 は ,空 気 の 力 に よ る 受 動 的 な も の で あ る が ,R.J. Woodは ,こ の 回 転 が 上 昇 力 を 生 み 出 す に あ た り 鍵 と な る ,と 迎 角 変 化 の 重 要 性 を 述 べ て い る .
実 際 の 鳥 の 羽 ば た き に お い て も ,フ ラッピ ン グ,フェザ リ ン グ,ス パ ニ ン グ,
リ ー ド ラ グ と いった4種 の 動 き を 複 合 さ せ た 運 動 と なって い る. こ れ ら の 運 動 で は フ ラッピ ン グ 運 動 が 羽 ば た き の 角 度 ,フェザ リ ン グ 運 動 が 翼 の 迎 角 ,ス パ ニ ン グ 運 動 が 翼 面 積 ,リ ー ド ラ グ 運 動 が 翼 の 前 後 位 置 を 変 化 つ つ 迎 角 変 化 さ せ る 運 動 と なって い る.[34]
第2章 可 変 迎 角 機 構 を 有 す る 飛 行 ロ ボット
14 2.1 可 変 迎 角 機 構
Fig. 2.2は 回 転 翼 部 の1箇 所 を 回 転 軸 方 向 か ら 見 た 図 で あ り,Fig. 2.3は 回 転 中 心Or,偏 心 点Oe,メ イ ン リ ン ク,サ ブ リ ン ク,翼 か ら な る 閉 リ ン ク 機 構 の 詳 細 図 で あ る .
Rotational direction
Center of rotation:Or
Eccentric point:Oe
Lift force
Drag force Wing 1
Wing 2
Wing 3
Fig. 2.2:Variable attack angle mechanism (Overview).
サ イ ク ロ ジャイ ロ 翼 の 特 徴 は 翼 が 回 転 軸 に 対 し 平 行 に 回 転 す る こ と で あ る .こ の 点 が 一 平 面 内 を 翼 が 回 転 す る ヘ リ コ プ タ と は 明 ら か に 異 なって い る .ま た ,翼 後 方 を 支 え る サ ブ リ ン ク の 回 転 中 心 を メ イ ン リ ン ク の 回 転 中 心 か ら 偏 心 さ せ る こ と で ,回 転 位 置 に 応 じ て 迎 角 α が 変 化 す る 可 変 迎 角 機 構[27, 28]と なって い る .こ こ で ,迎 角 α は 空 気 流 入 方 向 と 翼 弦 線 の な す 角 度 で あ る .
第2章 可 変 迎 角 機 構 を 有 す る 飛 行 ロ ボット
15
O
p
c
e
sub-link main-link
Or e
Lift force
Drag force wc
Fig. 2.3:Variable attack angle mechanism (Detailed view).
2.2 機 体 構 造
翼 を 回 転 さ せ て 推 進 力 ,揚 力 を 得 る 回 転 翼 機 に 分 類 さ れ る 飛 行 体 で は ,回 転 翼 部 か ら 機 体 を 回 転 さ せ よ う と す る 反 ト ル ク が 働 く. よって 飛 行 を 考 え た 場 合 に は ,機 体 の 回 転 を 防 止 す る 機 構 や ,回 転 し な い よ う な 構 造 と す る 必 要 が あ る. 一 般 的 な ヘ リ コ プ タ を 例 と し て 挙 げ る と ,シ ン グ ル ロ ー タ 型 の ヘ リ コ プ タ で はFig.2.4の よ う に テ ー ル ロ ー タ に よって 機 体 の 回 転 を 防 止 す る モ ー メ ン ト を 発 生 さ せ ,同 時 軸 二 重 反 転 型 や タ ン デ ム ロ ー タ 型 の ヘ リ コ プ タ で は ,Fig.2.5,Fig.2.6に 示 す よ う に2つ の メ イ ン ロ ー タ を 反 転 さ せ る こ と で 機 体 の ヨ ー 回 転 を 防 止 し て い る.[35]
著 者 ら が 開 発 し て い る サ イ ク ロ ジャイ ロ 翼 型 飛 行 ロ ボット の 機 体 は ,Fig.2.7 に 示 す よ う に 回 転 翼 部 を4箇 所 有 し ,そ れ ぞ れ 隣 り 合 う 翼 の 回 転 方 向 を 逆 向 き に す る こ と で 翼 の 回 転 に よ る 反 ト ル ク を 相 殺 し ,機 体 全 体 が 回 転 す る
第2章 可 変 迎 角 機 構 を 有 す る 飛 行 ロ ボット
16
Rotation Anti-torque Force by tail rotor
Fig. 2.4:Single rotor helicoper’s mechanism for canceling Anti-torque.
Rotation
Fig. 2.5:Counter propeller helicoper’s mechanism for canceling Anti-torque.
Rotation Anti-torque
Fig. 2.6:Tandem rotor helicoper’s mecha- nism for canceling Anti-torque.
こ と を 防 ぐ 構 造 と なって い る .
サ イ ク ロ ジャイ ロ 翼 は 翼 の 回 転 の 半 径 方 向 で あ れ ば ,ど の 方 向 に も 推 進 力 を 発 生 さ せ る こ と が で き る .そ の た め ,Fig.2.8に 示 す よ う に ,ヘ リ コ プ タ ー で は 前 進 ,後 退 時 に 機 体 を 進 行 方 向 へ 傾 け る 必 要 が あ る が ,サ イ ク ロ ジャイ ロ 翼 を 持 つ 飛 行 体 で は ,頭 上 げ,頭 下 げ ど ち ら の 姿 勢 で あって も 前 進 ,後 退 が 可 能 と な る .そ れ と と も に ,さ ま ざ ま な 姿 勢 で の ホ バ リ ン グ も 可 能 と なっ て い る .
第2章 可 変 迎 角 機 構 を 有 す る 飛 行 ロ ボット
17
Rotor with variable attack angle mechanism
Rotational direction
Fig. 2.7:Cyclogyro-based flying robot with 4 rotors.
第2章 可 変 迎 角 機 構 を 有 す る 飛 行 ロ ボット
18
Goahead Go back
Helicopter
Cyclogyro wings
Fig. 2.8:Comparison of flight attitude between helicopter and cyclogyro wing.
2.3 飛 行 ロ ボット の 設 計 パ ラ メ ー タ
本 稿 に お け る サ イ ク ロ ジャイ ロ 翼 を 有 す る 飛 行 ロ ボット の 機 体 の 設 計 パ ラ メ ー タ は 以 下 の 通 り で あ る .
● 翼 部
b [mm] 翼 幅
wc [mm] 翼 弦
S [m2] 翼 面 積 n [−] 翼 枚 数
● 可 変 迎 角 機 構 部
O 回 転 中 心 点
Oe 偏 心 点
lm [mm] メ イ ン リ ン ク 長 ls [mm] サ ブ リ ン ク 長 e [mm] 偏 心 距 離 c [mm] リ ン ク 間 距 離
第2章 可 変 迎 角 機 構 を 有 す る 飛 行 ロ ボット
19
θ [deg.] メ イ ン リ ン ク 回 転 角 度
θp [deg.] 偏 心 角 度
Fig. 2.3を 見 て も 分 か る よ う に 偏 心 距 離eと 偏 心 角 度θpは 本 機 構 特 有 の パ ラ メ ー タ で あ る .偏 心 距 離eの 変 化 は 翼 迎 角 の 振 れ 幅 に 寄 与 し ,偏 心 距 離e が 長 く な る ほ ど 回 転 中 の 翼 の 振 れ 幅 は 大 き く な る .こ の 詳 細 と 偏 心 距 離eの 取 り う る 範 囲 に つ い て は 次 章 に て 述 べ る .ま た ,偏 心 角 度θpの 変 化 は ,回 転 翼 部 全 体 を 回 転 さ せ る こ と に 相 当 す る た め ,発 生 す る 力 の ベ ク ト ル の 方 向 を 変 化 さ せ る こ と が で き る .つ ま り 偏 心 角 度θpを 変 化 さ せ る こ と に よ り 飛 行 の 制 御 を 行 い ,サ イ ク ロ ジャイ ロ 翼 特 有 の 高 い 運 動 能 力 を 発 揮 す る こ と が 可 能 と な る .第6章 で は こ の 特 性 を 利 用 し ,推 進 力 の 方 向 制 御 機 構 を 開 発 す る .
飛 行 ロ ボット に 使 用 す る 翼 の 平 面 形 状 は 矩 形 で あ る た め ,翼 幅bと 翼 弦 長 wcか ら 1 枚 の 翼 面 積Sが 以 下 の よ う に 算 出 で き る .
S[m2] =bwc/10−6 (2.1)
第3章 ,第4章 ,第5章 に お け る 翼 面 積Sは 上 記 の 式 に よって 得 ら れ た も の を 使 用 す る が ,こ こ で 翼 面 積Sの 単 位 は[m2]で あ る .ま た ,上 記 の パ ラ メ ー タ の 他 に 翼 の 回 転 数f [Hz]が あ る が ,回 転 数 は 実 験 に お い て パ ル ス カ ウ ン タ を 用 い て 計 測 で き る .
20
第 3 章
実験に基づく設計パラメータの選定と 浮上実験
3.1 予 備 実 験
過 去 の 実 験[27][28]に お い て は ,片 持 ち は り に ひ ず み ゲ ー ジ を 取 り 付 け た Fig.3.1に 示 す よ う な 実 験 装 置 を 製 作 し ,上 昇 力 ,推 進 力 の 測 定 を 行って い た. し か し ,回 転 す る 翼 と 実 験 装 置 と の 衝 突 を 防 止 す る た め に ,は り は あ る 程 度 の 長 さ を 必 要 と し て お り,計 測 結 果 に 振 動 を 含 む 結 果 と なった.
Fig. 3.1:Experimental system with strain gauge.[28]
そ こ で ,本 章 の 予 備 実 験 に お い て は ,Fig.3.2の よ う な 台 ば か り を 用 い た 装 置 を 使 用 し て 上 昇 力 の 測 定 を 行った .上 昇 力 測 定 の 原 理 は 機 体 を 運 転 さ せ
第3章 実 験 に 基 づ く 設 計 パ ラ メ ー タ の 選 定 と 浮 上 実 験
21
る と 上 昇 力 が 発 生 し ,そ の 力 で 台 ば か り の 針 が 上 昇 力 の 分 だ け 動 く と い う 単 純 な も の で あ る が ,台 ば か り に 使 用 さ れ て い る バ ネ の 特 性 上 ,高 周 波 の 振 動 の 影 響 を ひ ず み ゲ ー ジ よ り も 受 け に く い も の と なって い る .
実 験 に は2つ の ロ ー タ を 有 す る 機 体 を 使 用 し ,回 転 周 波 数3Hzか ら1Hz刻 み で 機 体 の ス ム ー ズ に 回 転 で き る 回 転 数( 約10Hz)ま で 行 い ,最 後 に モ ー タ の 可 能 最 高 回 転 数 ま で 運 転 し 上 昇 力 の 測 定 実 験 を 行った .こ の 時 ,翼 の 回 転 周 波 数 は パ ル ス カ ウ ン タ を 用 い て 計 測 を 行った .実 験 機 の 材 料 と し て メ イ ン リ ン ク,サ ブ リ ン ク に は カ ー ボ ン パ イ プ,翼 に はRCヘ リ コ プ タ 用 の ブ レ ー ド(Kyosho EH15)を 加 工 し 用 い て い る .ま た ,モ ー タ に は マ ク ソ ン 社 製4.5W DCモ ー タ を 使 用 し ,モ ー タ を 支 え る フ レ ー ム に は ア ク リ ル を 用 い て い る . 設 計 パ ラ メ ー タ は 以 下 の 通 り で あ る.
Fig. 3.2:Experimental system with platform scale.
・main-link長:lm=130 mm
・sub-link長:ls=135 mm
・ 偏 心 距 離:e=15 mm
・ リ ン ク 間 距 離:c=45 mm
第3章 実 験 に 基 づ く 設 計 パ ラ メ ー タ の 選 定 と 浮 上 実 験
22
・ 翼 弦 長:wc=45 mm
・ 翼 幅:b=120 mm
・ 翼 枚 数:n=4 枚
・ 機 体 重 量:224 g
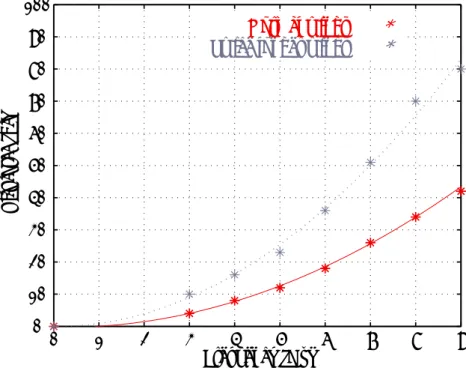
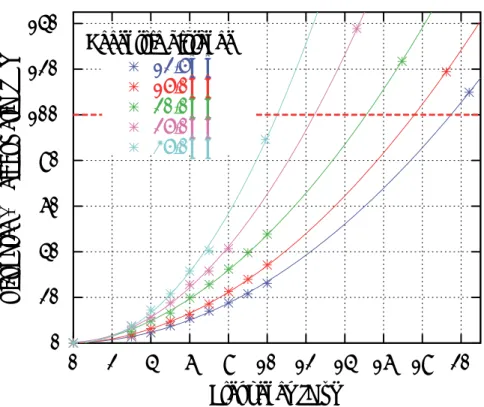
そ の 結 果 をTable3.1に 示 す.結 果 を 見 る と 最 大 回 転 数15.38Hzの 時 に 上 昇 力
/ 自 重 比= 58.0%を 得 る こ と が で き た .得 ら れ た 結 果 を プ ロット し た グ ラ フ をFig.3.3に 示 す.ま た ,空 気 力 が 回 転 周 波 数 に 対 し て2次 の 関 数 と な る と 仮 定 し て ,こ の 実 験 結 果 に 対 し て2次 曲 線 に て 近 似 し ,現 在 の 機 体 で 自 立 飛 行 が 可 能 ,す な わ ち 上 昇 力 / 自 重 比 が100%を 超 え る 回 転 周 波 数 を 調 べ た .こ の 結 果 ,約40%の 軽 量 化 ,ま た は ,回 転 周 波 数20Hzを 超 え れ ば 飛 行 が 可 能 で あ る こ と が 分 かった .
Table 3.1:Preliminary experimental results with platform scale.
Rotational frequencyf[Hz] Lift force[gf] Lift force/Weight ratio[%]
3 4 1.8
4 8 3.6
5 12 5.4
6 18 8.0
7 26 11.6
8 34 15.2
9 42 18.8
10 56 25.0
15.38 130 58.0
第3章 実 験 に 基 づ く 設 計 パ ラ メ ー タ の 選 定 と 浮 上 実 験
23
0 10 20 30 40 50 60 70 80 90 100
0 2 4 6 8 10 12 14 16 18 20
L W Ratio [%]
Frequency [Hz]
Fig. 3.3:Measuring results of preliminary experiment.
3.2 翼 面 積 の 検 討
3.1節 で は ,開 発 し た 実 験 機 が 飛 行 す る た め に ,約40%の 軽 量 化 ,ま た は , 回 転 周 波 数20Hz以 上 の 翼 の 回 転 が 必 要 で あ る と 分 かった .
製 作 し た 実 験 機 の 機 体 は 翼 の 素 材 と し て 発 泡 ス チ ロ ー ル ,リ ン ク 部 分 に は カ ー ボ ン パ イ プ,モ ー タ 固 定 部 分 に ア ク リ ル を 使 用 し て い る .ど の 材 質 も 軽 量 な も の で あ り,各 パ ー ツ に つ い て 設 計 段 階 で 軽 量 化 を 重 要 視 し た 設 計 と なって い る た め ,40%近 く の 軽 量 化 は 非 常 に 困 難 で あ る と い え る.
ま た ,回 転 周 波 数20Hz以 上 で 翼 を 回 転 さ せ る た め に 考 え ら れ る 方 法 と し て ,さ ら に モ ー タ を 変 更 す る こ と が 考 え ら れ る. し か し ,現 在 よ り も 大 き な モ ー タ へ 変 更 し た 場 合 に は ,モ ー タ の 重 量 も 増 加 し ,そ れ に 伴 い 機 体 全 体 の 重 量 も 増 加 す る こ と に 繋 が る .よって ,モ ー タ の 大 型 化 を 行 い20Hz回 転 周 波 数 を 得 ら れ た と し て も ,機 体 の 重 量 も 増 加 し て い る た め ,今 以 上 の 上 昇 力 が 必 要 と なって く る .こ の こ と か ら ,現 在 の モ ー タ か ら 変 更 は 行 わ な い こ
第3章 実 験 に 基 づ く 設 計 パ ラ メ ー タ の 選 定 と 浮 上 実 験
24
と と す る.
そ こ で 上 昇 力 を 増 加 さ せ る 方 法 と し て ,翼 面 積 の 増 加 と い う 点 に 着 目 し た .翼 に 働 く 力 をFig.3.4に 示 す よ う に ,空 気 が 板 を 押 す 力 で あ る と 考 え る と ,F = 12ρSV2sinα で 与 え ら れ る. こ れ よ り 翼 面 積 が 増 加 す れ ば 翼 に 働 く 力 も 増 加 す る と い う こ と が 分 か る .よって ,翼 幅 を 現 在 の 翼 よ り も2倍 に し て 上 昇 力 測 定 実 験 を 行 う こ と に し た .以 後 ,翼 幅 を2倍 に し た 翼 を2倍 翼 と し , 従 来 の 翼 を 普 通 翼 と 呼 ん で 区 別 す る .
sub link main link
Fig. 3.4:Force generated by a wing.
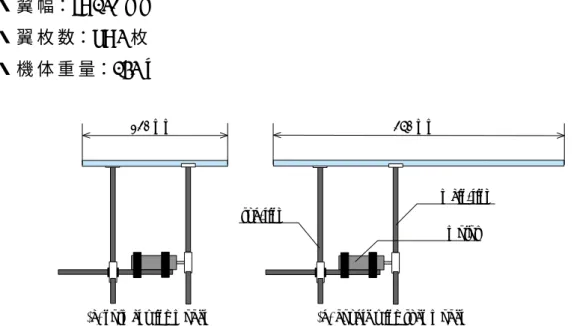
Fig.3.5に 示 す よ う に ,従 来 の 機 体 で 使 用 し て い た 翼 の 翼 幅 は120mmで あ り,
2倍 翼 の 機 体 で は 翼 幅240mmと なって い る. 翼 幅 を2倍 に し た2倍 翼 は ,翼 と リ ン ク が 接 続 さ れ て い る 点 か ら の 方 持 ち 部 分 が 以 前 の 機 体 よ り も 長 い た め , 翼 回 転 中 に は 遠 心 力 に よって 翼 端 が 外 側 に 反 り 返って し ま う.こ の 反 り 返 り を 防 ぐ た め に ,Fig.3.6の よ う に 向 か い 合った 翼 の 翼 端 を 糸 で 結 び ,遠 心 力 に よ る 広 り を 抑 制 す る よ う に し た .2倍 翼 に し た 機 体 重 量 は 以 前 の 機 体 よ り も30g増 加 し ,254gと なった .機 体 の 各 設 計 パ ラ メ ー タ は 以 下 の 通 り で あ る.
・main-link長:lm=130 mm
・sub-link長:ls=135 mm
・ 偏 心 距 離:e=15 mm
・ リ ン ク 間 距 離:c=45 mm
第3章 実 験 に 基 づ く 設 計 パ ラ メ ー タ の 選 定 と 浮 上 実 験
25
・ 翼 弦 長:wc=45 mm
・ 翼 幅:b=240 mm
・ 翼 枚 数:n=4 枚
・ 機 体 重 量:254 g
(a) normal wing model (b) double wing span model
120 mm 240 mm
sub-link
main-link motor
Fig. 3.5:Comparison normal wing model with double wing span model.
Fig. 3.6:Nylon string at wing-tip
2倍 翼 に つ い て の 実 験 は 普 通 翼 の 時 と 同 様 ,3Hzか ら 回 転 周 波 数 を1Hzず つ 上 げ て 実 験 を 行った が ,翼 面 積 が2倍 に なった こ と に よ り 翼 に 働 く 空 気 抵
第3章 実 験 に 基 づ く 設 計 パ ラ メ ー タ の 選 定 と 浮 上 実 験
26
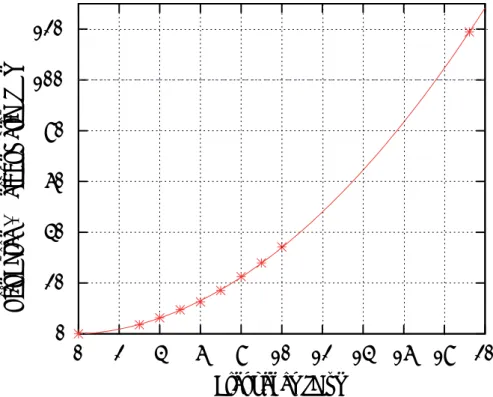
抗 も 大 き く な り,モ ー タ へ の 負 荷 が 大 き く なった .そ の た め ,測 定 の 上 限 値 を 回 転 周 波 数9Hzま で と し た .結 果 をTable3.2に 示 す.ま た ,普 通 翼 と2倍 翼 の 結 果 を 比 較 し た グ ラ フ をFig.3.7,Fig.3.8に 示 す.Fig.3.7は 回 転 周 波 数 と 上 昇 力 の 関 係 を 示 し て い る .こ の 結 果 を 普 通 翼 と 比 較 す る と ,2倍 翼 の 上 昇 力 は 普 通 翼 の 上 昇 力 の 約2倍 に なって い る こ と が 確 認 で き る .ま た ,Fig.3.8の 上 昇 力 / 自 重 比 の 比 較 に お い て も ,2倍 翼 の 機 体 は 翼 幅 が 伸 び た 事 に よ り 機 体 重 量 が 約13%増 加 し て い る に も か か わ ら ず,普 通 翼 の 結 果 を 上 回 る 良 い 結 果 を 得 て い る .9Hzの 時 の 結 果 を 比 較 す る と2倍 翼 で は 上 昇 力 / 自 重 比
=31.5%と 良 い 結 果 を 得 る こ と が で き た .し か し ,現 在 の2倍 翼 で は 翼 に 働 く 空 気 抵 抗 に よ る モ ー タ へ の 負 荷 の た め に 最 高 回 転 周 波 数 を 上 げ る こ と が で き な い .こ れ で は 低 い 回 転 周 波 数 で 普 通 翼 よ り 良 い 結 果 を 得 て も 高 回 転 で モ ー タ を 運 転 す る こ と が で き な い の で ,2倍 翼 に す る 優 位 性 が 見 ら れ な い . そ こ で ,次 節 で は2倍 翼 を 用 い て 回 転 周 波 数 を 落 と さ ず に 上 昇 力 / 自 重 比 を 上 げ る 方 法 を 検 討 す る .
Table 3.2:Experimental results with double wing span model.
Rotational frequencyf[Hz] Lift force[gf] Lift force/Weight ratio[%]
3 10 3.9
4 16 6.3
5 23 9.1
6 36 14.2
7 51 20.1
8 70 27.6
9 80 31.5
第3章 実 験 に 基 づ く 設 計 パ ラ メ ー タ の 選 定 と 浮 上 実 験
27
0 1 2 3 4 5 6 7 8 9
0 10 20 30 40 50 60 70 80 90 100
Frequency [Hz]
Lift force [gf]
Twice longer wings * Normal wings *
Fig. 3.7:Comparison of lift force between normal wing and double wing span model.
0 5 10 15 20 25 30 35 40
0 1 2 3 4 5 6 7 8 9
Lift force / Weight Ratio [%]
Frequency [Hz]
Normal wings Twice longer wings
Fig. 3.8:Comparison of lift force / weight ratio between normal wing and double wing span model.
![Fig. 1.5:Cyclogyro-based airplane planed in 1930s [24].](https://thumb-ap.123doks.com/thumbv2/123deta/7735261.1711785/19.892.266.670.478.777/fig-cyclogyro-based-airplane-planed-in-s.webp)