バーチャル空間における自動車運転シミュレータの忠実性に関する考察
2
0
0
全文
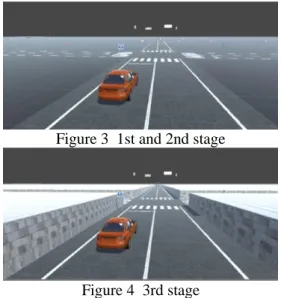
(2) 情報処理学会第 81 回全国大会. 次に,反対車線上の他車両(Non-player car)とす れ違うときの自車両の横方向位置について分散 分析を実施した.他車両の大きさの違いには有 意差はなく,壁の有無にのみ有意差が認められ た(Table 3). Table 3 ANOVA table (Lateral position beside the Non-player car). Figure 3 1st and 2nd stage. Wall Non player car Error Total. Figure 4 3rd stage 2.2 実験方法 被験者に本実験では 3 つのステージを走行して もらうことを事前に説明し,それらの違いも事 前に通知した.また,日本の交通ルールに従っ て走行してほしいこと,実験の途中で気分が悪 くなったら直ちに実験を中断してよいことを説 明した.さらに本番の実験を開始する前に,練 習用に第 1 のステージと同様のコースを走行させ た.実験に参加した被験者は 21 歳から 24 歳 (平 均 22.6,標準偏差 1.0)までの 5 名(男性 4 名,女 性 1 名)である. 3. 結果 全走行行程のうち,中央線のない道路の走行に 注目して分析を実施した.分析は 3 つのそれぞれ のステージについて,直線走行部分の自車両の 走 行 レ ーン 上 での 横 方向 位 置 を分 散 分析 した (Table 1).結果は有意であり,5%水準にて多重比 較を実施した結果,3 ステージ全てで有意であっ た. Table 1 ANOVA table (Lateral position of all path) Stage Error Total. Sum Sq. 19891.7 37605.9 57497.6. df 2 64458 64460. Mean Sq. 9945.87 0.58. F 17047.64. p -value 0.000. 3 ステージの横方向位置の平均と標準偏差を Table 2 に示す.横方向位置については車線中央 をゼロとし,右方向(左方向)を正(負)とす る.他車両の存在によって車両位置は左寄りに なり,さらに壁がある場合は左寄りの傾向が更 に強く現われている. Table 2 Mean and standard deviation (Lateral position of all path) 水準 他車両 なし. 壁 なし. あり あり. なし あり. Mean [m]. Standard deviation [m]. -0.162. 0.838. -1.215. 0.740. -1.271. 0.719. 4-14. Sum Sq. 2.1918 1.6953 48.2923 52.1736. df 1 2 108 111. Mean Sq. 2.19180 0.84767 0.44715. F 4.9 1.9. p -value 0.029 0.155. 有意差のあった壁の有無による車両位置の平 均と標準偏差を Table 4 に示す.Table 2 の結果同 様に壁がある場合は左寄りになっているが,他 車両の横を通過するときはさらに左寄りになっ ている. Table 4 Mean and standard deviation (Lateral position beside the Non-player car) 水準 壁 なし あり. Mean [m] -1.234 -1.513. Standard deviation [m] 0.675 0.674. 考察・まとめ 壁の存在が左寄り傾向を阻害すると想定して いたが,結果としてさらなる左寄り傾向を示し たことから,壁の存在が被験者に対して左側へ の距離推定の補助になっていたと判断する. シミュレータを産業利用する際に忠実性を重 要視する見解が多いが,人間が認識,判断,行 動をする刺激が何なのかを明確にすることなく, ただ単に忠実性を議論してもモノづくりの現場 に VR を有効活用することはできない. 4.. 参考文献 [1] 今田 道宏, 小森 賢, “エンジン制御システム開 発技術”, 計測と制御, 2014, Vol. 53 No. 8, pp. 702-709. [2] Joost C.F. de Winter, Peter M. van Leeuwen, Riender Happee, “Advantages and Disadvantages of Driving Simulators: A Discussion”, Proceedings of Measuring Behavior Conference, 2012, pp.47-50. [3] 村瀬健二, 武田雄策, 原利宏, 金子寛彦, “自動 車運転時の周辺対象認知における東部と眼 球運動”, 日本バーチャルリアリティ学会論文 誌, 2018, Vol. 23 No.3 pp.207-216. [4] Ambar Yadav, Arti Singh, “Driving Simulator”, IOSR Journal of Computer Engineering, 2014, Vol. 16 No.3 pp.33-38.. Copyright 2019 Information Processing Society of Japan. All Rights Reserved..
(3)
図

関連したドキュメント
平均車齢(軽自動車を除く)とは、令和3年3月末現在において、わが国でナン バープレートを付けている自動車が初度登録 (注1)
ところで、 2016年の相模原市障害者殺傷事件をきっかけに、 政府
となる。こうした動向に照準をあわせ、まずは 2020
・難病対策地域協議会の設置に ついて、他自治体等の動向を注 視するとともに、検討を行いま す。.. 施策目標 個別目標 事業内容
スペイン中高年女性の平均時間は 8.4 時間(標準偏差 0.7)、イタリア中高年女性は 8.3 時間(標準偏差
を育成することを使命としており、その実現に向けて、すべての学生が卒業時に学部の区別なく共通に
を育成することを使命としており、その実現に向けて、すべての学生が卒業時に学部の区別なく共通に
経験からモジュール化には、ポンプの選択が鍵を握ると考えて、フレキシブルに組合せ が可能なポンプの構想を図 4.15
