11 立体骨組の解析
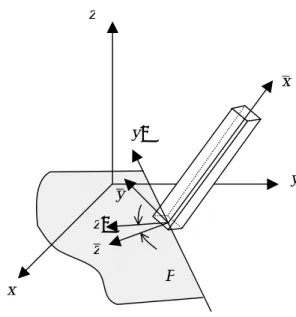
11.1 変位場の一次元化 立体骨組要素の任意点の , ,x y z方向変位 , ,u v wは,断面剛の仮定と Bernoulli-Euler の仮定より, 次式のように断面の図心軸上の軸方向変位 c u ,たわみv wc, c,ねじり角θxによって表される。 ( ) ( , , ) ( ) ( , ) ( , , ) ( ) ( ) ( , , ) ( ) ( ) c c c c x c x dv x dw u x y z u x y z y z dx dx v x y z v x z x w x y z w x y x ω φ θ θ = − − + = − = + (11.1) ここに,ωはゆがみ関数,φ はφ =dθx/dxであるが,ここではサンブナンねじりを仮定し,φは 一定とする。 図 11.1 はり要素とはりの変位場 図 11.2 ねじり角と変位 ,v wの関係 (11.1)式より,ひずみ成分が次式のように計算される。 2 2 2 2 ( ) ( ) ( ) 0 c c c x xy zx y z yz u du x d v x d w x y z x dx dx dx u v z y x y w u y x z z ε ω γ φ ω γ φ ε ε γ ∂ = = − − ∂ § · ∂ ∂ ∂ = + =¨ − ¸ ∂ ∂ © ∂ ¹ ∂ ∂ §∂ · = + =¨ + ¸ ∂ ∂ © ∂ ¹ = = = (11.2) また,応力−ひずみ関係式より,応力成分は次式のように表される。 uc vc wc θx v u w x z y y z θx −zθx yθx x0 x x xy xy zx zx y z yz E G G σ ε τ γ τ γ σ σ τ = = = = = = (11.3) したがって,要素のひずみエネルギーは次式で表される。 2 2 2 2 2 2 2 2 1 1 2 2 c c c e du d v d w V E y z dxdydz G z y dxdydz dx dx dx y z ω ω φ ½ § · °§∂ · §∂ · ° = ¨ − − ¸ + ®¨ − ¸ +¨ + ¸ ¾ ∂ ©∂ ¹ © ¹ © ¹ °¯ °¿
³³³
³³³
(11.4) 断面内 ( , )y z の積分を行うと次のようになる。 2 2 2 2 2 2 2 2 0 1 2 c c c l e z y du d v d w V EA EI EI GK dx dx dx dx φ § · § · § · ½ ° ° = ® ¨ ¸ + ¨ ¸ + ¨ ¸ + ¾ © ¹ © ¹ © ¹ ° ° ¯ ¿³
(11.5) ここに, l は,はり要素の長さであり,また, 2 2 2 2 , z y A dydz I y dydz I z dydz K z y dydz y z ω ω = = = §∂ · ∂ ½ ° § · ° = ®¨ ∂ − ¸ +¨© ∂ + ¸¹ ¾ © ¹ ° ° ¯ ¿³³
³³
³³
³³
(11.6) また,(11.5)式の導出では,断面の原点は図心,座標軸は断面の主軸方向とするため, 0, 0, 0ydydz= zdydz= yzdydz=
³³
³³
³³
(11.7) であることを利用している。 11.2 離散化 (11.1)式の断面の図心軸上の軸方向変位 c u ,たわみv wc, c,ねじり角θxを,それぞれ次式のよう にはり要素の節点変位で表す。 2 3 2 3 2 3 2 3 2 ( ) 1 ( ) 1 3 2 2 3 2 ( ) 1 3 c c c i j c c c i zi j zj c x x u x u u l l x x x x x x x x x v x v l v l l l l l l l l l l x w x l θ θ § · = −¨ ¸ + © ¹ ½ ½ ½ ½ ° § · § · ° °§ · § · § · ° ° § · § · ° ° § · § · ° = −® ¨ ¸ + ¨ ¸ ¾ + ®¨ ¸− ¨ ¸ +¨ ¸ ¾ +® ¨ ¸ − ¨ ¸ ¾ + −® ¨ ¸ +¨ ¸ ¾ © ¹ © ¹ © ¹ © ¹ © ¹ © ¹ © ¹ © ¹ © ¹ ° ° ° ° ° ° ° ° ¯ ¿ ¯ ¿ ¯ ¿ ¯ ¿ § · = − ¨ ¸ + © ¹ 3 2 3 2 3 2 3 2 2 3 2 ( ) 1 c c i yi j yj x xi xj x x x x x x x x w l w l l l l l l l l l x x x l l θ θ θ θ θ ½ ½ ½ ½ ° § · ° − °§ ·− § · +§ · ° +° § · − § · ° − −° § · +§ · ° ® © ¹¨ ¸ ¾ ®¨ ¸© ¹ © ¹¨ ¸ © ¹¨ ¸ ¾ ® © ¹¨ ¸ © ¹¨ ¸ ¾ ® ¨ ¸© ¹ ¨ ¸© ¹ ¾ ° ° ° ° ° ° ° ° ¯ ¿ ¯ ¿ ¯ ¿ ¯ ¿ § · = −¨ ¸ + © ¹ (11.8) ただし,θz =dvc/dx,θy = −dwc/dxである。 (11.8)式を(11.5)式に代入して計算すると次式が得られる。{ }
[ ]
{ }
1 2 T e e e V = U k U (11.9) ここに,{ } {
T}
e c c c c c c i i i xi yi zi j j j xj yj zj U = u v w θ θ θ u v w θ θ θ (11.10)[ ]
11 22 33 44 53 55 62 66 71 77 82 86 88 93 95 99 104 1010 113 115 119 1111 122 126 128 1212 Sym. 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 k k k k k k k k k k k k k k k k k k k k k k k k k k k ª º « » « » « » « » « » « » « » « » =« » « » « » « » « » « » « » « » « » « » ¬ ¼ (11.11) 11 22 3 33 3 44 53 2 55 62 2 66 71 11 77 11 82 22 86 62 88 22 93 33 95 53 99 33 104 44 1010 44 113 53 115 55 119 53 1 12 12 , , , 6 4 6 4 , , , , , , , , , , , , / 2, , y z y y z z EI EI EA GK k k k k l l l l EI EI EI EI k k k k l l l l k k k k k k k k k k k k k k k k k k k k k k k k k k k = = = = = − = = = = − = = − = − = = − = − = = − = = = = − 111 55 122 62, 126 66/ 2, 128 62, 1212 66 k k k k k k k k k = = = = − = (11.12) 11.3 要素剛性マトリックスの座標変換 本節以降では,要素の座標系で定義されたものに上付バーを付し,全体座標系で定義されたも のと区別する。 (11.11)式の節点変位ベクトルは要素の座標系で定義されたものであるからこれを{ }
e U と表すと, 全体座標系で定義された節点変位{ }
e U との関係は,(3.2)式で表される座標変換マトリックスを用 いて,次式のように表される。{ }
e{ }
e g U =ª º¬ ¼T U (11.13) ここに,{ } {
e T c c c c c c}
i i i xi yi zi j j j xj yj zj U = u v w θ θ θ u v w θ θ θ (11.14){ } {
e T c c c c c c}
i i i xi yi zi j j j xj yj zj U = u v w θ θ θ u v w θ θ θ (11.15)[ ]
[ ]
[ ]
[ ]
[ ]
, xx xy xz g yx yy yz zx zy zz T l l l T T T l l l T l l l T ª º ª º « » « » « » ª º= =« » ¬ ¼ « » « » « » ¬ ¼ « » ¬ ¼ (11.16) (11.13)式を(11.9)式に代入すると,全体座標系で定義された要素剛性マトリックスが次式により 得られる。ただし,次式では kª º¬ ¼ が(11.11)式で定義されるものである。[ ]
k =ª º¬ ¼Tg ª º¬ ¼k ª º¬ ¼Tg (11.17) (11.17)式を具体的に計算すると以下のようになる。ただし,表記を簡単にするため,[ ]
T の成分を 次のように表しておく。[ ]
xy xy xy z z z l m n T l m n l m n ª º « » =« » « » ¬ ¼ (11.18) このとき,[ ]
11 21 22 31 32 33 41 42 43 44 51 52 53 54 55 61 62 63 64 65 66 71 72 73 74 75 76 77 81 82 83 84 85 86 87 88 91 92 93 94 95 96 97 98 99 101 102 103 104 105 106 107 108 109 1010 111 112 113 114 1 Sym. k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k = 15 116 117 118 119 1110 1111 121 122 123 124 125 126 127 128 129 1210 1211 1212 k k k k k k k k k k k k k k k k k k ª º « » « » « » « » « » « » « » « » « » « » « » « » « » « » « » « » « » « » ¬ ¼ (11.19) ここに,(
)
2 2 2 11 11 22 33 2 2 2 21 11 22 33 22 11 22 33 2 2 2 31 11 22 33 32 11 22 33 33 11 22 33 41 53 62 42 53 62 43 53 , , , , , x y z x x y y z z x y z x x y y z z x x y y z z x y z y z y z z y k k l k l k l k k l m k l m k l m k k m k m k m k k l n k l n k l n k k m n k m n k m n k k n k n k n k k k l l k k l m k l m k k l = + + = + + = + + = + + = + + = + + = + = + = 2 2 2 62 , 44 44 55 66 ynz +k l n kz y =k lx +k ly +k lz(
)
(
)
51 53 62 52 53 62 53 53 62 2 2 2 54 44 55 66 55 44 55 66 61 53 62 62 53 62 63 53 62 64 44 55 66 65 44 , , , , , , z y y z y z y z z y x x y y z z x y z z y y z z y y z y z x x y y z z x k k l m k l m k k k m m k k m n k m n k k l m k l m k l m k k m k m k m k k l n k l n k k m n k m n k k k n n k k l n k l n k l n k k m n = + = + = + = + + = + + = + = + = + = + + = 2 2 2 55 66 , 66 44 55 66 x +k m ny y +k m n kz z =k nx +k ny +k nz71 11 72 21 73 31 74 41 75 51 76 61 77 11 81 21 82 22 83 32 84 42 85 52 86 62 87 72 88 22 91 31 92 32 93 33 94 43 95 53 96 63 97 73 98 , , , , , , , , , , , , , , , , , , , , k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k = − = − = − = − = − = − = = − = − = − = − = − = − = − = = − = − = − = − = − = − = − = − 83, k99 =k33
(
)
(
)
(
)
101 41 102 42 103 43 2 2 2 104 44 55 66 105 44 55 66 106 44 55 66 107 74 108 84 109 94 1010 44 , , 1 1 1 2 , 2 2 2 2 2 , , , x y z x x y y z z x x y y z z k k k k k k k k l k l k l k k l m k l m k l m k k l n k l n k l n k k k k k k k k = = = = − + + = − + + = − + + = = = =(
)
(
)
111 51 112 52 113 53 2 2 2 114 105 115 44 55 66 116 44 55 66 117 75 118 85 119 95 1110 54 1111 55 , , 1 1 , 2 2 2 2 , , , , x y z x x y y z z k k k k k k k k k k m k m k m k k m n k m n k m n k k k k k k k k k k = = = = = − + + = − + + = = = = =(
)
121 61 122 62 123 63 2 2 2 124 106 125 116 126 44 55 66 127 76 128 86 129 96 1210 64 1211 65 1212 66 , , 1 , 2 2 , , , , , x y z k k k k k k k k k k k k n k n k n k k k k k k k k k k k k = = = = = = − + + = = = = = = (11.20) 11.4 座標変換マトリックスの計算 (11.18)式の座標変換マトリックスの成分は,次のように計算される。ただし,ここでは,全体 座標系を(
x y z, ,)
,要素の座標系を(
x y z, ,)
で表す。また,全体座標系における要素両端の節点座 標を(
x y zi, i, i)
,(
x y zj, j, j)
で表す。 (1) x軸方向の方向余弦 要素の材軸方向である x 軸方向の方向余弦は次式で表される。 ( ) / , ( ) / , ( ) / x j i x j i x j i l = x −x l m = y −y l n = z −z l (11.21) ただし, 2 2 2 ( j i) ( j i) ( j i) l= x −x + y −y + z −z 。 (2) y z, 軸方向の方向余弦 , y z軸方向は,コードアングル(断面の回転角)を定義することによって与える。以下その方 法について示す。 (a) 部材 x 軸が全体 z 軸と平行でない場合 部材の x 軸に垂直な平面 P を考え,その平面 P 上で, xy 平面に平行な y′軸を考え,つぎに, 部材 x 軸および y′軸と右手の関係をなす z′軸を考える。ここに, y′軸の正方向は, z′軸の正 方向が全体 z 座標値が増大する方向を向くように定める。そして,平面 P 上で, y′軸から部 材 y 軸へ測った角をコードアングルθ とする。ただし,この角度は,部材 x 軸まわりに右ね じ方向を正のコードアングルとする。図 11.3 部材 x 軸が全体 z 軸と平行でない場合のコードアングルθ (b) 部材 x 軸が全体 z 軸と平行な場合 全体 y 軸から部材 z 軸へ測った角をコードアングルθ とする。ただし,部材 x 軸まわりに右 ねじの方向を正のコードアングルとする。 図 11.4 部材 x 軸が全体 z 軸と平行な場合のコードアングルθ 以上の(a),(b)の場合についての方向余弦の計算法を示す。 まず,(a)の場合は, y′軸は部材 x 軸に直交し,また xy 平面に平行であるから全体 z 軸に対して も直交する。したがって,部材 x 軸方向の単位ベクトルを ex,全体 z 軸方向の単位ベクトルを ezと すると, y′軸方向の単位ベクトル ey′は, ex×ezに比例する。すなわち, 0 e 0 , e , e 1 x y z x x y y x y l l m m n n ′ ′ ′ ′ ½ ½ ½ ° ° ° ° ° ° =® ¾ =® ¾ =® ¾ ° ° ° ° ° ° ¯ ¿ ¯ ¿ ¯ ¿ (11.22) とすると, x y z y x ′ y ′ z θ z P x y y z θ
2 2 , 2 2, 0 x x y y y x x x x m l l m n l m l m ′ = ′= ± ′= + + * (複号同順) (11.23) 複合のいずれをとるかは z′軸によって決まる。 z′軸方向の単位ベクトル ez′は, exおよび ey′と右手系の関係をなすことから, e e e z z z x y z l m n ′ ′ ′ ′ ′ ½ ° ° =® ¾= × ° ° ¯ ¿ (11.24) であるから,これを計算すると次式となる。 , , z x y x y z x y x y z x y x y l′ =m n′−n m′ m′ =n l′−l n′ n′ =l m′−m l ′ (11.25) ここで, z′軸の正の方向は,全体 z 座標値が増大する方向を正にとるので,
(
)
cos e , ez′ z =nz′ >0 (11.26) となる必要がある。nz′を(11.25),(11.23)式を用いて計算すると, 2 2 z x x n′ = ± l +m (11.27) となるので,nz′ >0となるためには,複号の前の方を採用しなければならない。 以上より,y z′ ′, の方向余弦は次のようになる。 2 2 2 2 2 2 2 2 2 2 , , 0 , , x x y y y x x x x x x x x z z z x x x x x x m l l m n l m l m n l m n l m n l m l m l m ′ ′ ′ ′ ′ ′ − = = = + + − − = = = + + + (11.28) となる。 部材 y 軸方向の単位ベクトル ey,部材 z 軸方向の単位ベクトル ezと e ,ey′ z′との関係は,コード アングルθ を用いて, e e cos e sin e e sin e cos y y z z y z θ θ θ θ ′ ′ ′ ′ = + = − + (11.29) したがって, e cos sin e sin cos y y z y y y z y y z z y z z z y z z y z l l l m m m n n n l l l m m m n n n θ θ θ θ ′ ′ ′ ′ ′ ′ ′ ′ ′ ′ ′ ′ ½ ½ ½ ° ° ° ° ° ° =® ¾ ®= ¾ +® ¾ ° ° ° ° ° ° ¯ ¿ ¯ ¿ ¯ ¿ ½ ½ ½ ° ° ° ° ° ° =® ¾= −® ¾ +® ¾ ° ° ° ° ° ° ¯ ¿ ¯ ¿ ¯ ¿ (11.30) 一方,(b)の場合は, z′軸を全体 y 軸と一致させることになるから,部材 y′軸は, 0 e e e 1 0 0 0 y x x y y z x x y x l l n m m n n ′ ′ ′ ′ ½ ½ ½ ½ ° ° ° ° ° ° ° ° =® ¾= × =® ¾ ® ¾ ® ¾× = ° ° ° ° ° ° ° °¯ ¿ ¯ ¿ ¯ ¿ ¯ ¿ (11.31) 上式を(11.30)式に代入すると,0 e 0 cos 1 sin 0 0 0 e 0 sin 1 cos 0 0 y x y y y z x z z z l n m n l n m n θ θ θ θ ½ ½ ½ ° ° ° ° ° ° =® ¾ ® ¾= +® ¾ ° ° ° °¯ ¿ ° °¯ ¿ ¯ ¿ ½ ½ ½ ° ° ° ° ° ° =® ¾= −® ¾ +® ¾ ° ° ° ° ° ° ¯ ¿ ¯ ¿ ¯ ¿ (11.32) 参考のため,要素が全体座標軸上にあり,コードアングル 0 の場合の全体座標と要素座標の関 係を図 11.5 に示しておく。 図 11.5 コードアングル 0 の場合の要素座標系と全体座標系の関係 11.4 断面力の計算法 立体骨組要素の場合,断面力は, ,y z方向のせん断力Q Qy, z, x 軸方向の軸力 P , ,y z軸まわり の曲げモーメントMy,Mz, x 軸まわりのねじりモーメントMxであり,それぞれ次式で定義され る。 x P=
³³
σ dydz (11.33) y x M =³³
zσ dydz (11.34) z x M = −³³
yσ dydz (11.35) x xy zx M y z dydz z y ω τ ω τ ∂ §∂ · ½ °§ · ° = ®¨ + ¸ +¨ − ¸ ¾ ∂ ∂ © ¹ ° © ¹ ° ¯ ¿³³
(11.36) z y dM Q dx = (11.37) x y z x z y z x z y x yy z dM Q dx = (11.38) ところで,断面内の応力σ τ τx, xy, zxは,要素座標系で定義された節点変位ベクトルから次式によ って求められる。 2 2 2 2 2 3 2 2 3 2 2 3 2 ( ) ( ) ( ) 1 1 6 12 4 6 6 12 2 6 6 12 4 6 c c c x x c i c i zi c c j j zj du x d v x d w x E E y z dx dx dx v u E Ey x x x x u v l l l l l l l l l l Ez x x l l l l σ ε θ θ § · = = ¨ − − ¸ © ¹ ½ ° ° ½ ª º ° ° ° ° ª º § · § · § · § · = ¬«− ¼»° °® ¾− ¬«¨©− + ¸ ¨¹ ©− + ¸ ¨¹ © − ¸ ¨¹ ©− + ¹¸»¼® ¾ ° ° ¯ ¿ ° ° ¯ ¿ § · § − ¨− + ¸ − − +¨ © ¹ © 2 3 2 6 12 2 6 1 1 1 1 c i yi c j yj xi xy xy xj zx zx w x x w l l l l u v G G G z G z y x y y l l w u G G G y G y x z z z l θ θ θ ω ω τ γ φ θ ω ω τ γ φ ½ ° ° ª · § − · − − +§ ·º ° ° ® ¾ ¸ ¨ ¸ ¨ ¸ « ¹ © ¹ © ¹» ¬ ¼ ° ° ° ° ¯ ¿ ½ §∂ ∂ · §∂ · §∂ ·ª º = = ¨ + ¸= ¨ − ¸ = ¨ − ¸ «− »® ¾ ∂ ∂ ∂ ∂ ¬ ¼ © ¹ © ¹ © ¹ ¯ ¿ ∂ ∂ ∂ ∂ § · § · § · = = ¨ + ¸= ¨ + ¸ = ¨ + ¸ − ∂ ∂ ∂ ∂ © ¹ © ¹ © ¹ xi xj l θ θ ½ ª º ® ¾ « » ¬ ¼ ¯ ¿ (11.39) (11.39)式を(11.33)∼(11.38)式に代入すると,
[
1 1]
c i c j u EA P u l ½ ° ° = − ® ¾ ° ° ¯ ¿ (11.40) 2 3 2 2 3 2 6 12 4 6 6 12 2 6 c i yi y y c j yj w M EI x x x x w l l l l l l l l θ θ ½ ° ° ª§ · § · § · § ·º ° ° = «¨− + ¸ − − +¨ ¸ ¨ − ¸ − − +¨ ¸»® ¾ © ¹ © ¹ © ¹ © ¹ ¬ ¼ ° ° ° ° ¯ ¿ (11.41) 2 3 2 2 3 2 6 12 4 6 6 12 2 6 c i zi z z c j zj v M EI x x x x v l l l l l l l l θ θ ½ ° ° ª§ · § · § · § ·º ° ° = − «¨− + ¸ ¨− + ¸ ¨ − ¸ ¨− + ¸»® ¾ © ¹ © ¹ © ¹ © ¹ ¬ ¼ ° ° ° ° ¯ ¿ (11.42)[
1 1]
xi x xj GK M l θ θ ½ = − ® ¾ ¯ ¿ (11.43) 3 2 3 2 12 6 12 6 c i zi y z c j zj v Q EI v l l l l θ θ ½ ° ° ° ° ª º = − « − »® ¾ ¬ ¼ ° ° ° ° ¯ ¿ (11.44)3 2 3 2 12 6 12 6 c i yi z y c j yj w Q EI w l l l l θ θ ½ ° ° ° ° ª º = « − − − »® ¾ ¬ ¼ ° ° ° ° ¯ ¿ (11.45) ただし,断面の原点は図心に設定されているため,
³³
ydydz=0,³³
zdydz=0であり, A , ,I Iy zは, 断面積と ,y z軸まわりの断面二次モーメント, K はサンブナンのねじり定数でそれぞれ次式で定 義される。 2 2 2 2 , z y A dydz I y dydz I z dydz K z y dydz y z ω ω = = = §∂ · ∂ ½ ° § · ° = ®¨ − ¸ +¨ + ¸ ¾ ∂ © ∂ ¹ © ¹ ° ° ¯ ¿³³
³³
³³
³³
(11.46) 要素両端の曲げモーメントは,(11.41), (11.42)式から次式となる。 2 2 2 2 6 4 6 2 6 2 6 4 c i yi yi y c j yj c i yi yj y c j yj w M EI w l l l l w M EI w l l l l θ θ θ θ ½ ° ° ° ° ª º = «− »® ¾ ¬ ¼ ° ° ° ° ¯ ¿ ½ ° ° ° ° ª º = « − − − »® ¾ ¬ ¼ ° ° ° ° ¯ ¿ (11.47) 2 2 2 2 6 4 6 2 6 2 6 4 c i zi zi z c j zj c i zi zj z c j zj v M EI v l l l l v M EI v l l l l θ θ θ θ ½ ° ° ° ° ª º = − «− − − »® ¾ ¬ ¼ ° ° ° ° ¯ ¿ ½ ° ° ° ° ª º = − « − »® ¾ ¬ ¼ ° ° ° ° ¯ ¿ (11.48) 以上の断面力をまとめて表すと次式となる。3 2 3 2 3 2 3 2 2 2 2 0 0 0 0 0 0 0 0 0 0 12 6 12 6 0 0 0 0 0 0 0 0 12 6 12 6 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 6 4 6 2 0 0 0 0 0 0 0 0 6 2 0 0 0 z z z z y y y y y z x yi y y y y yj y y zi zj EA EA l l EI EI EI EI l l l l P EI EI EI EI Q l l l l Q GK GK M l l M EI EI EI EI M l l l l EI EI M l l M − − − − ½ ° ° − − − ° ° ° ° ° ° − ° °= ® ¾ ° ° − ° ° ° ° ° ° − ° ° ¯ ¿ 2 2 2 2 2 6 4 0 0 0 0 0 6 4 6 2 0 0 0 0 0 0 0 0 6 2 6 4 0 0 0 0 0 0 0 0 c i c i c i xi yi zi c j c j c y y j xi z z z z yi zi z z z z u v w u v EI EI w l l EI EI EI EI l l l l EI EI EI EI l l l l θ θ θ θ θ θ ª º « » « » ½ « » ° ° « » ° ° « » ° ° « » ° ° « » ° ° « » ° ° « » ° ° « » ° °° ° ® ¾ « » ° ° « » ° « » ° « » ° « − − » ° « » ° « » ° « − » ° « » °¯ ¿ « » − − − « » « » ¬ ¼ ° ° ° ° ° ° ° ° (11.49) ただし,上式の節点変位は,要素の座標系で定義されたものであるから,(11.13)式によって,全 体座標系の節点変位に変換する必要がある。(11.13)式を(11.49)式に代入すると,断面力は,全体 座標系の節点変位から次式によって計算される。
{ }
[ ]
{ }
e f S = G U (11.50) ここに,{ }
e U は全体座標系で定義された節点変位ベクトル,また,{ }
Sf ,[ ]
G は次式となる。{ } {
T}
f y z x yi yj zi zj S = P Q Q M M M M M (11.51)[ ]
11 12 13 17 18 19 21 22 23 24 25 26 27 28 29 210 211 212 31 32 33 34 35 36 37 38 39 310 311 312 44 45 46 410 411 412 51 52 53 54 55 56 57 58 59 510 511 512 61 62 63 64 65 66 67 68 69 61 0 0 0 0 0 0 0 0 0 0 0 0 G G G G G G G G G G G G G G G G G G G G G G G G G G G G G G G G G G G G G G G G G G G G G G G G G G G G G G G G G G G = 0 611 612 71 72 73 74 75 76 77 78 79 710 711 712 81 82 83 84 85 86 87 88 89 810 811 812 G G G G G G G G G G G G G G G G G G G G G G G G G G ª º « » « » « » « » « » « » « » « » « » « » « » ¬ ¼ (11.52) 11 x, 12 x, 13 x, 17 11, 18 12, 19 13 EA EA EA G l G m G n G G G G G G l l l = − = − = − = − = − = − 21 3 22 3 23 3 24 2 25 2 26 2 27 21 28 22 29 23 210 24 211 25 212 26 12 12 12 , , 6 6 6 , , , , , , , z z z y y y z z z z z z EI EI EI G l G m G n l l l EI EI EI G l G m G n l l l G G G G G G G G G G G G = − = − = − = − = − = − = − = − = − = = =31 3 32 3 33 3 34 2 35 2 36 2 37 31 38 32 39 33 310 34 311 35 312 36 12 12 12 , , 6 6 6 , , , , , , , y y y z z z y y y y y y EI EI EI G l G m G n l l l EI EI EI G l G m G n l l l G G G G G G G G G G G G = = = = − = − = − = − = − = − = = = 44 x, 45 x, 46 x, 410 44, 411 45, 412 46 GK GK GK G l G m G n G G G G G G l l l = − = − = − = − = − = − 51 2 52 2 53 2 54 55 56 57 51 58 52 59 53 510 54 511 55 512 56 6 6 6 , , 4 4 4 , , , , , / 2, / 2, / 2 y y y z z z y y y y y y EI EI EI G l G m G n l l l EI EI EI G l G m G n l l l G G G G G G G G G G G G = − = − = − = = = = − = − = − = = = 61 51 62 52 63 53 64 510 65 511 66 512 67 51 68 52 69 53 610 54 611 55 612 56 , , , , , , , , , , G G G G G G G G G G G G G G G G G G G G G G G G = − = − = − = − = − = − = = = = − = − = − 71 2 72 2 73 2 74 75 76 77 71 78 72 79 73 710 74 711 75 712 76 6 6 6 , , 4 4 4 , , , , , / 2, / 2, / 2 z z z y y y z z z z z z EI EI EI G l G m G n l l l EI EI EI G l G m G n l l l G G G G G G G G G G G G = = = = = = = − = − = − = = = 81 71 82 72 83 73 84 710 85 711 86 712 87 71 88 72 89 73 810 74 811 75 812 76 , , , , , , , , , , G G G G G G G G G G G G G G G G G G G G G G G G = − = − = − = − = − = − = = = = − = − = −