1 序論
将来,我が国が自在で独自の月・惑星探査を実施す るのであれば,重力天体への軟着陸技術は必須である. しかし我が国では,過去には SELENE-B 検討1)の中で
着陸 Flying Test Bed(FTB)の開発が進められたものの中 断し,当該技術領域で十分な実績を有するに至ってい ない.このことは,将来の重力天体着陸探査ミッショ ンを創出するための障害となっている.この状況を打 破するべく,宇宙科学研究本部において,月へのピン ポイント着陸技術実証ミッション SLIM が提案され, 2019 年度中の打上を想定した開発が開始されつつあ る.またこの成果を前提として,米国との協働による 月極域探査,月サンプルリターンなどのミッションが 検討されている. 日本が今後どのような探査プログラムを実施するか については,未だ明確な指針は示されていない.しか し多くの議論から,SLIM,SELENE-R などなどの無人 月探査を経て,月において重力天体着陸技術や有人技 術を蓄積し,その一方で火星特有の探査技術について は無人火星着陸探査によって獲得し,両者を兼備する ことによって,2030 年以降の国際協働有人火星探査に おいて主導的な地位を獲得することが,日本の探査プ ログラムとして有効であると推察される.このような 状況の下,重力天体への着陸技術の底上げを行うこと を目的として汎用的な着陸 FTB を開発し,着陸機構, 推進系,姿勢制御および航法誘導,シミュレータなど の共通基盤的な技術開発を推進することが極めて有効 であると考えられ,研究開発が進められている.個々 のミッションにおける着陸機の開発は,それぞれ独自 の戦略に基づいて行われると推察されるが,汎用的な 着陸 FTB による共通基盤技術開発が平行して行われ ていることによって,間接的にはもちろん,直接的に も着陸機の開発に寄与することが期待されている. 以上がFTBの研究開発の目的・意義であるが,昨年 から開始された着陸FTBの実験には多大な時間と費用 を要するため,制御系の独立した検証環境があると好 ましい.これにより,着陸FTB実験機のガス充填時に センサ・制御系の動作確認を行うことができるととも に,実験時の転倒や墜落による実験機の損傷,ガスタ ンクの爆発等のリスクを低減できると考える.以上よ り,本研究ではUAVを用いた着陸FTBのプレ実験機の 開発を目的とする.
2 FTB(Flying Test Bed)
FTB は,月や惑星探査にとって重要な技術である軟 着陸技術を確立することを目的に作製された試験装置 である.前述の中断された FTB は,垂直上昇・降下, 着陸を行うことが可能で,航法誘導装置を搭載し機能 や性能を確認することが計画されていた.2000 年 6 月 にはクレーンで吊り下げた状態の飛行試験を完了して いる.この実験により,基本的な機能についての確認 が行われ,2001 年 2~3 月には FTB がより確実に飛行 できるようにするための試験と月軟着陸技術の研究に 使う基本的なデータを得るための実験が行われた. 今回の研究対象とするFTB2)は,2016年の実験に用い られた着陸FTBである.外観をFig. 1に,スラスタ配置 をFig. 2に,諸元をTable 1に示す.ここでは,メインス ラスタをMTi (i=1,2…,8)と定義している.本機体の特徴 は,8基のメインスラスタで高度および姿勢を制御する 必要があること,各スラスタ推力に誤差が生じること, 各スラスタに角度がついていること,スラスタの噴射 遅れおよび噴射停止遅れが発生すること,そして制御 周期が5Hzと低周期であることなどがあげられる.
Fig. 1 The exterior of FTB Fig. 2 Layout of the thrusters Table 1 Elements of FTB Weight[kg] Dry 71.3 Wet 93.3 Center of gravity(x, y, z)[m] (0.0112, 0.0085, 0.2286) Injection Delay[ms] ON 45 OFF 80 Cant[deg] 0~20(Nominal 15)
UAV を用いた FTB のためのプレ実験機開発
○丹羽千知 上野誠也 樋口丈浩 大谷流葵(横浜国立大学)
Development of Pre-Experimental Unit Using UAV for FTB
* C. Niwa, S. Ueno, T. Higuchi and R. Otani (Yokohama National Univ.)
Abstract- Researches and developments of a Flying Test Bed(FTB) for planetary landing have been advanced to develop landing technologies for planetary investigation such as the Moon and Mars in the future. In this study, a pre-experimental unit using Unmanned Aerial Vehicle (UAV) is prepared as an independent verification environment for FTB control system. Development of experimental device for FTB is shown in this paper.
Key Words: UAV, Flying Test Bed, Multi-Rotor
第60 回自動制御連合講演会(2017 年 11 月 10 日~ 12 日・東京) 17PR0002/0000-1086 © 2017 SICE
3 Multi-rotor
UAV とは‘Unmanned Aerial Vehicle’の略であり,無 人で飛行する航空機のことである.その大きさはラジ コンのような手のひらサイズから軍事用途まで幅広く 使用され,現在注目を集めている.農業,林業におけ る UAV を利用した一定高度からの効率的な農業散布, 活火山などの人間が直接調査することが困難な危険地 帯での調査および地震・洪水などの大規模災害におい ての迅速かつ広範囲の調査,軍事における無人偵察, 無人爆撃といった様々な目的で使用されている. 空中を移動する UAV は障害物のような環境による制 限を受けづらいが,移動するためのエネルギ効率が悪 いため,運用可能な時間が短いという問題がある.本 研究においては,この問題はバッテリを複数用意する ことで解決されるが,今後試験における飛行時間が長 くなることが予想されるため低消費エネルギで飛行可 能にすることも重要となる. 本研究で用いるマルチロータは UAV の一種である. マルチロータ機は複数のプロペラで構成され,プロペ ラの枚数で呼称が区分される.4 枚翼であればクアッ ドロータ,8 枚翼であればオクタロータと呼ばれる. マルチロータ機は,姿勢を傾けることで移動するため, 姿勢制御系に適切な目標姿勢を与えることで制御を行 う.この特性を利用し,操縦の簡易化や各種センサを 用いて目標位置と現在位置の誤差を計算し修正する自 動航行を可能にしている.また,基本的に隣り合うプ ロペラは逆回転し,これにより反トルクを打ち消しあ う.この反トルクを利用して機体方向の制御(yaw 方向) を行い,機体の傾き(roll, pitch 方向)を制御する際には, 各ロータの推力差を利用する.
4
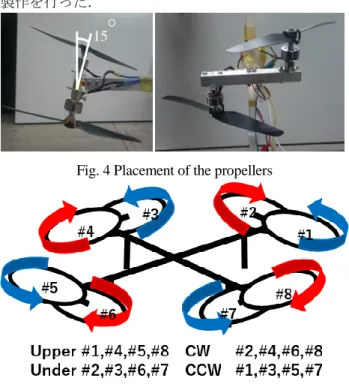
機体設計 本章では,FTB の特徴を模倣するプレ実験機の設計 について述べる.Fig. 3 に FTB の機体サイズを示す. プレ実験機設計にあたり,まず実機体の 1/2 スケール で機体製作を行う.前述した FTB の特徴を再現するた めにハードウェアでは,プロペラを 8 枚用いるオクタ ロータ機を採用し,Fig. 4 に示すように各プロペラに 15°キャント角を設けることとした.また,ソフトウ ェアでスラスタの噴射遅れ,噴射停止遅れならびに制 御周期 5Hz を再現することを目指す.Fig.3 Body size of FTB
本機体の特徴として,各ロータを上下に配置してい ることが挙げられる(Fig. 4 参照).これは各プロペラの 干渉を避けるためである.このロータ配置による推力 への影響を調べるために,単発ロータと Fig.4 のロー タ配置での推力測定実験を行った.それぞれ定格電圧 7.4[V]と最大放電電圧 8.4[V]で測定を行った.この結果 を Table. 2 に示す.この結果より,多少の減少がある ものの推力への大きな影響はないと考えた.また,各 プロペラの反トルクを打ち消すために,各ロータの回 転 方 向 を Fig. 5 に示すように設 定する . こ こ で CW(Clockwise)は時計回り,CCW(Counter‐Clockwise)は 反時計回りである.各構成部品ならびに各重量を Table 3 に示す.これらの情報から機体の設計を行い,さら にバッテリとマイコンを機体上方に取り付け,FTB 実 機同様機体重心を着力点よりも上方に配置するように 製作を行った.
Fig. 4 Placement of the propellers
Fig. 5 Layout of the propellers Table 2 Result of the thrust mesurment
Throttle 50% 100% Single Rotor 7.4[V] 32[g] 84[g] 8.4[V] 38[g] 101[g] Twin Rotor 7.4[V] 48[g] 152[g] 8.4[V] 61[g] 185[g] Table 3 Component
Required Parts Weight[g]
m-bed 24 Receiver 7 Battery 49 Rotor 17×8 ESC 5×8 Ultrasonic Sencer 16 Acceleration Sencer 10 Total 282 15
°
5 機体特性
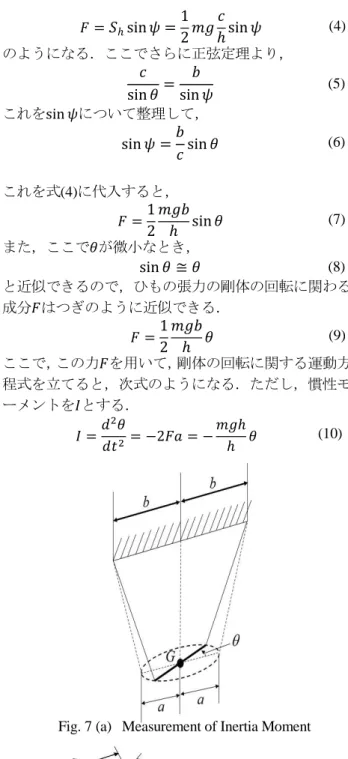
本章では,プレ実験機の機体特性について記述する. Fig. 6 に製作したプレ実験機の外観を示す.完成機体 の重量は 524[g]であった.機体を固定し,推力測定を 行った結果を Table 4 に示す.この結果は,機体重量を 除いたものであり,充分に飛行可能な推力を有するこ とを確認できた. 次に機体の慣性モーメントの測定を行った.天井か ら 2 本のひもにより剛体を吊るし,水平に回転させる ことで剛体の慣性モーメントを測る方法について述べ る.Fig. 7(a)のように,太線を剛体として,剛体の質量 を m,重力加速度を g とし,重心から等しい距離 a に ひもを取り付け,天井から吊るす場合を考える.ひも は天井に 2b の間隔をあけて取り付けるものとし,ひ もは伸び縮みしないものとする.剛体の初期位置から 回転した角度をここでは𝜃とする.また,Fig. 7(b)に剛 体とひもの半分を横と上から見た図を示す.天井から 剛体までの高さを h とし,一方のひもにはたらく張力 を S とする.ここで剛体に,ひもからはたらくモーメ ントを考える.剛体とひもを上から見たときにひもと 剛体の成す角を𝜓とし,Fig. 7(c)のようにひもにはたら く張力を垂直成分と水平成分の二つに分解できるよう ひもを横から見たとき,ひもと垂線がなす角を𝜑とし, ひもにはたらく張力の垂直成分を𝑆𝑣,水平成分を𝑆ℎと する.すると𝑆𝑣と𝑆ℎは次のようになる. 𝑆𝑣= 𝑆 cos 𝜑 = 1 2𝑚𝑔 (1) 𝑆ℎ = 𝑆 sin 𝜑 = 1 2𝑚𝑔 tan 𝜑 (2) また,ひもを水平面に投影した長さを𝑐とすると,次の 関係が示せる. tan 𝜑 =𝑐 ℎ (3) ここでひもの張力のうち,剛体の回転に係る成分を F とすると,Fig. 6 Pre-Experimental Unit Table 4 Thrust of the Unit
Throttle[%] Thrust[g] 50 346 65 472 80 611 100 739 𝐹 =𝑆ℎsin 𝜓 = 1 2𝑚𝑔 𝑐 ℎsin 𝜓 (4) のようになる.ここでさらに正弦定理より, 𝑐 sin 𝜃 = 𝑏 sin 𝜓 (5) これをsin 𝜓について整理して, sin 𝜓 =𝑏 𝑐sin 𝜃 (6) これを式(4)に代入すると, 𝐹 =1 2 𝑚𝑔𝑏 ℎ sin 𝜃 (7) また,ここで𝜃が微小なとき, sin 𝜃 ≅ 𝜃 (8) と近似できるので,ひもの張力の剛体の回転に関わる 成分𝐹はつぎのように近似できる. 𝐹 =1 2 𝑚𝑔𝑏 ℎ 𝜃 (9) ここで,この力𝐹を用いて,剛体の回転に関する運動方 程式を立てると,次式のようになる.ただし,慣性モ ーメントを𝐼とする. 𝐼 =𝑑 2𝜃 𝑑𝑡2 = −2𝐹𝑎 = − 𝑚𝑔ℎ ℎ 𝜃 (10)
Fig. 7 (a) Measurement of Inertia Moment
Fig. 7 Measurement of Inertia Moment
この運動方程式を解くと, 𝜔 = √𝑚𝑔𝑎𝑏 𝐼ℎ (11) 𝜃 = 𝐴 cos (√𝑚𝑔𝑎𝑏 𝐼ℎ 𝑡) + 𝐵 sin (√ 𝑚𝑔𝑎𝑏 𝐼ℎ 𝑡) (12) となる.ここで,𝜔は角周波数,𝐴および𝐵は未定係数, 𝑡は時間である.ここで,この回転の周期𝑇と周波数𝜔 の関係は次のようになる. 𝑇 =2𝜋 𝜔 = 2𝜋√ 𝐼ℎ 𝑚𝑔𝑎𝑏 (13) この式について,慣性モーメント𝐼について整理すると, 𝐼 =𝑇 2𝑚𝑔𝑎𝑏 4𝜋2ℎ (14) となる.この式から,剛体を 2 本のひもで吊るし,回 転の周期を計測することで剛体の慣性モーメントを求 めることができる. 以上の理論より作製した機体の各軸周りの慣性モー メント計測を行った.Fig. 8 に実験の様子を示す.実験 時の各値については Table 5 に示す.ただし,天井から 機体までの距離ℎは直接計測が困難なため,天井側の ひもの取付間隔2𝑏と機体側のひもの取付間隔2𝑎,およ びひもの長さ𝑙から幾何学的関係を用い計算から求め た.以上のように天井から機体を吊るし,機体を水平 に回転させ 10 周期の時間を 10 回計測し,その平均か ら式(10)を用いて慣性モーメントを算出した.ただし, 機体の質量を 0.524[kg],重量加速度を 9.81[m/s2]とす る.計測結果を Table 6 に示す.以上より,各軸周りの 慣性モーメントは以下の通りである.
Table. 5 Setting Length
𝑥-axis 𝑦-axis 𝑧-axis
2𝑏[mm] 605 605 605
2𝑎[mm] 355 355 260
𝑙[mm] 1000 1000 1000
ℎ[mm] 992 992 985
Table. 6 Measurement Results
𝑥-axis 𝑦-axis 𝑧-axis
Average Time[s] 1.178 1.181 1.656
Inertia Moment
[𝑘𝑔 × 𝑚2] 0.00977 0.00983 0.01425
Fig. 8 Measurement Experiment
6.
飛行試験
本章では,プレ実験機の制御則およびシミュレーシ ョン結果と飛行試験について記述する. 設計機体の運動方程式は機体の重心を原点とした機 体固定座標系(xyz 系)を用いて以下のように表される. 𝑚(𝑈̇ + 𝑄𝑊 − 𝑅𝑉) = 𝐹𝑥 (15) 𝑚(𝑉̇ + 𝑅𝑈 − 𝑃𝑊) = 𝐹𝑦 (16) 𝑚(𝑊̇ + 𝑃𝑉 − 𝑄𝑈) = 𝐹𝑧 (17) 𝐼𝑥𝑥𝑃̇ + (𝐼𝑧𝑧− 𝐼𝑦𝑦)𝑄𝑅 = 𝑀𝜑 (18) 𝐼𝑦𝑦𝑄̇ + (𝐼𝑥𝑥− 𝐼𝑧𝑧)𝑅𝑃 = 𝑀𝜃 (19) 𝐼𝑧𝑧𝑊̇ + (𝐼𝑦𝑦− 𝐼𝑥𝑥)𝑃𝑄 = 𝑀𝜓 (20) ここで𝑚は機体重量,𝑈,𝑉,𝑋は𝑥,𝑦,𝑧軸方向速度, 𝐼𝑥𝑥,𝐼𝑦𝑦,𝐼𝑧𝑧は𝑥,𝑦,𝑧軸まわりの慣性モーメントで ある.なお本研究の機体設計においては,簡単のため 慣性乗積は無視する.上式を変形して設計機体の運動 方程式3)は以下のように表される. 𝑈̇ = −𝑄𝑊 + 𝑅𝑉 +𝐹𝑥 𝑚 (21) 𝑉̇ = −𝑅𝑈 + 𝑃𝑊 +𝐹𝑦 𝑚 (22) 𝑊̇ = −𝑃𝑉 + 𝑄𝑈 +𝐹𝑧 𝑚 (23) 𝑃̇ =𝐼𝑦𝑦− 𝐼𝑧𝑧 𝐼𝑥𝑥 𝑄𝑅 +𝑀𝜑 𝐼𝑥𝑥 (24) 𝑄̇ =𝐼𝑧𝑧− 𝐼𝑥𝑥 𝐼𝑦𝑦 𝑅𝑃 +𝑀𝜃 𝐼𝑦𝑦 (25) 𝑊̇ =𝐼𝑧𝑧− 𝐼𝑥𝑥 𝐼𝑧𝑧 𝑃𝑄 +𝑀𝜓 𝐼𝑧𝑧 (26) また,機体の飛行経路および姿勢角を定義するために 地上固定座標系(𝑥𝐸𝑦𝐸𝑧𝐸座標系)を導入すると,地上か ら観測した機体の経路および姿勢角は以下のように表 される. 𝑥𝐸̇ = 𝑈 cos 𝜃𝐸cos 𝜓𝐸+𝑉(sin 𝜑𝐸sin 𝜃𝐸cos 𝜓𝐸− cos 𝜑𝐸sin 𝜓𝐸)
+𝑊(cos 𝜑𝐸sin 𝜃𝐸cos 𝜓𝐸+ sin 𝜑𝐸sin 𝜓𝐸)
(27)
𝑦𝐸̇ = 𝑈 cos 𝜃𝐸sin 𝜓𝐸
+𝑉(sin 𝜑𝐸sin 𝜃𝐸sin 𝜓𝐸− cos 𝜑𝐸cos 𝜓𝐸)
+𝑊(cos 𝜑𝐸sin 𝜃𝐸sin 𝜓𝐸− sin 𝜑𝐸cos 𝜓𝐸)
(28)
𝑧𝐸̇ = −𝑈 sin 𝜃𝐸+𝑉 sin 𝜑𝐸cos 𝜃𝐸
+ 𝑊 cos 𝜑𝐸cos 𝜃𝐸 (29)
𝜑𝐸̇ = 𝑃 + 𝑄 sin 𝜑𝐸tan 𝜃𝐸
+ 𝑅 cos 𝜑𝐸tan 𝜃𝐸
(30)
𝜃𝐸̇ = 𝑄 cos 𝜑𝐸− 𝑅 sin 𝜑𝐸 (31)
𝜓𝐸̇ = 𝑄 sin 𝜑𝐸sec 𝜃𝐸+ 𝑅 cos 𝜑𝐸sec 𝜃𝐸 (32)
ここで𝜑𝐸,𝜃𝐸,𝜓𝐸はオイラー角である.以上より設
計機体の運動方程式を得ることができた.設計機体は この運動方程式を用いて運動シミュレーションを行い, 制御則の検証後,飛行試験を行う.
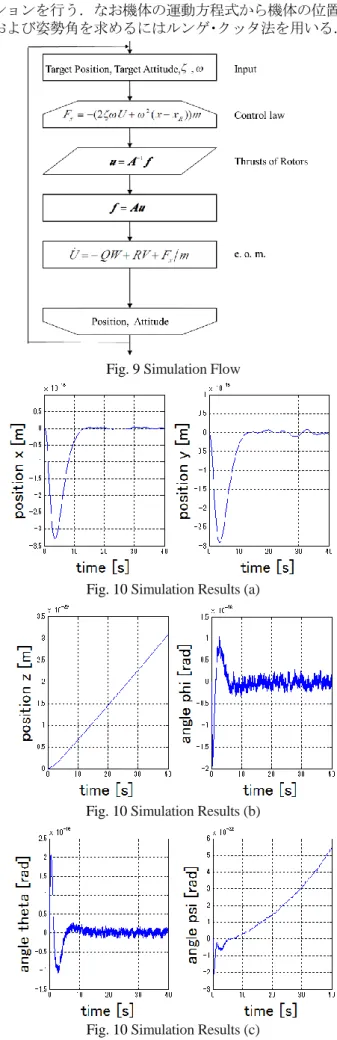
設計機体の制御系には PD 制御を導入する.PD 制御 とは P 制御(比例制御)と D 制御(微分制御)を併用した フィードバック制御の一種であり,その特徴は以下の 通りである.また,フィードバック制御とは現在の状 態を常時検出することで入力された目標値との比較を 行い,両者が一致するように出力を制御する制御方式 である. P 制御は,現在の状態と目標値との差に比例した制 御入力を行う制御方式であり,目標値に近づけば近づ くだけ出力が小さくなるため,正確に目標値に近づけ ることができる.D 制御は,現在の状態と目標値との 差が大きいときほど大きな制御入力を行う制御方式で あり,素早く目標値に近づけることが可能である.ま た変化に対する応答性が良いため,外乱に対して強い 制御方式である. 設計機体の飛行性能を確認するために,まず PD 制 御を導入し,運動シミュレーションを行うことで制御 則の検証を行う. 位置と姿勢角の目標値と現在値をとの誤差をそれぞ れ復元項と減衰項を加えた運動方程式へ代入し,目標 値の 1階微分は0であることを考慮すると次式を得る. 𝑥̈ = −(2𝜉𝜔𝑈 + 𝜔2(𝑥 − 𝑥 𝑅)) (33.a) 𝑦̈ = −(2𝜉𝜔𝑉 + 𝜔2(𝑦 − 𝑦 𝑅)) (33.b) 𝑧̈ = −(2𝜉𝜔𝑊 + 𝜔2(𝑧 − 𝑧 𝑅)) (33.c) 𝜑̈ = −(2𝜉𝜔𝑃 + 𝜔2(𝜑 − 𝜑 𝑅)) (34.a) 𝑥̈ = −(2𝜉𝜔𝑄 + 𝜔2(𝜃 − 𝜃𝑅)) (34.b) 𝑥̈ = −(2𝜉𝜔𝑅 + 𝜔2(𝜓 − 𝜓 𝑅)) (34.c) ここで添え字の R は目標地であることを表し,𝜉は減 衰比,𝜔は振動数である.ここで導入した𝜉,𝜔はシミ ュレーションを行って決定していく.上式(33),(34)の 両辺に機体重量,慣性モーメントを掛けることで次式 を得る. 𝐹𝑥= −(2𝜉𝜔𝑈 + 𝜔2(𝑥 − 𝑥𝑅))𝑚 (35.a) 𝐹𝑦 = −(2𝜉𝜔𝑉 + 𝜔2(𝑦 − 𝑦𝑅))𝑚 (35.b) 𝐹𝑧= −(2𝜉𝜔𝑊 + 𝜔2(𝑧 − 𝑧𝑅))𝑚 (35.c) 𝑀𝜑= −(2𝜉𝜔𝑃 + 𝜔2(𝜑 − 𝜑𝑅))𝐼𝑥𝑥 (36.a) 𝑀𝜃= −(2𝜉𝜔𝑄 + 𝜔2(𝜃 − 𝜃𝑅))𝐼𝑦𝑦 (36.b) 𝑀𝜓= −(2𝜉𝜔𝑅 + 𝜔2(𝜓 − 𝜓𝑅))𝐼𝑧𝑧 (36.c) 得られた式(35),(36)を制御則とすることで運動シミュ レーションを行う. 運動シミュレーションは Fig. 94)に示す手順で計算を 行うプログラムを作成して行う.まず式(33),(34)で定 義した目標位置,目標姿勢角,𝜉および𝜔を入力値とす ることでどのような運動を行うかを決定する.次に入 力値と式(35),(36)の制御則より目標位置と目標姿勢に 到達するのに必要な機体にかかる力とトルクの行列𝑓 を求める.この𝑓から必要な各ロータ推力を求めるこ とができる.最後に式(21)-(26)の機体運動方程式に𝑓を 代入することで 1 ステップ後の機体の位置・姿勢角を 求め,この位置および姿勢角と目標値との誤差を再び 制御則の入力とする計算を繰り返すことでシミュレー ションを行う.なお機体の運動方程式から機体の位置 および姿勢角を求めるにはルンゲ・クッタ法を用いる.
Fig. 9 Simulation Flow
Fig. 10 Simulation Results (a)
Fig. 10 Simulation Results (b)
手動操作により行う飛行試験を想定し,機体を上昇さ せるシミュレーションを行った.姿勢角は前述の制御 則により制御される.シミュレーションの制御パラメ ータは𝜉 = 0.7,𝜔 = 0.5[rad/s]とした.Fig. 10 にその 結果を示す.この結果より,制御則の妥当性を確認で きたと考える. FTB 実機にて使用される制御則の独立した検証環境 として,まずプレ実験機が飛行可能であることを確認 する必要がある.そのためにプレ実験機を吊り下げた 状態で飛行試験を行った. 機体制御のために,マイクロコンピュータ m-bed を 使用し,取得したセンサデータから姿勢角を推定し, 機体姿勢を安定させるため適切なロータ出力を算出す る.InvenSense 社の 9 軸センサ MPU-9150 を取り付け, 加速度・角速度を取得した.センサデータのドリフト 補正には,ジャイロセンサからの角度算出値と,加速 度センサからの角速度算出値を重み付けし,平均値を 用いる相補フィルタを用いて吊り下げ飛行試験を行っ た.実験の様子を Fig. 11 に示す. 機体は吊り下げられ,静止した状態からスロットル を上げていき,上昇を試みた.しかし,機体は不安定 な挙動を示した.そこで,これは各ロータの推力誤差 に起因するものと考え,各ロータの推力誤差を測定し た.この結果を Table. 7 に示す.測定結果より,推力 誤差は各ロータの平均値±10[%]以内に収まっている ことを確認できた.
Fig. 11 Hanging Experiment Table. 7 Thrust Error Rotor Number 7.4[V] 8.4[V] 50[%] 100[%] 50[%] 100[%] #1[g] 35 89 40 103 #2[g] 36 77 35 107 #3[g] 31 87 41 106 #4[g] 36 92 37 102 #5[g] 34 90 38 107 #6[g] 33 89 41 106 #7[g] 30 87 42 105 #8[g] 29 88 38 99
7. 結論
現在 FTB の開発,試験が進められているが,その試 験には時間や費用の制約がかかるという問題がある. そこで本稿では制御系の独立した検証環境としてプレ 実験機の設計,製作を行った.主な結論は以下の通り である. ・PD 制御による制御則を構築し,運動シミュレーショ ンよってその妥当性を検証した. ・制御則をプレ実験機へ実装,飛行試験を行ったが, 機体は各ロータの推力誤差により不安定な挙動を示 した. 今後,推力誤差による影響を考慮した制御則を構築 する必要がある.これは FTB 実機も該当する問題であ り,プレ実験機として FTB 実機の推力誤差を再現する ことも検討する必要がある. また,FTB のメインスラスタ噴射遅れの影響で,メ インスラスタを噴射したいときにできない,またはそ の逆が発生し,制御系を 8 基すべてのメインスラスタ に導入することは,細かい制御を行うことを困難にし ている.そこで現在奇数番号メインスラスタの 4 基は 一定噴射を行い,残りの 4 基に対して制御則を導入し, より細かい制御を行っている. スラスタとプロペラという特性が大きく異なるなか で,スラスタ特性(噴射遅れ・噴射停止遅れ)を再現して いくことも課題となる. 参考文献1) Shuniti Sasa,FTB(Flying Test Bed) Experiment for Lu-nar Landing,National Aerospace Laboratory of Japan RESEARCH PROGRESS 2001, 104/105(2002) 2) 田村俊熙,上野誠也,樋口丈浩,藤田和央,高柳大 樹,小澤宇志,重力天体着陸 FTB 飛行試験に向け た誘導制御則の設計に関する研究,第 59 回自動制 御連合講演会,1311/1316(2017) 3) 加藤寛一郎,大屋昭男,柄沢研治,航空機力学入 門,1/12,東京大学出版会(1982) 4) 虎谷大地,上野誠也,樋口丈浩,新型マルチロー タ実験機の計測姿勢制御系の飛行実証,誘導制御 シンポジウム資料,29,79/84(2012) 5) 町田充,屋内検査用飛行体の姿勢位置制御則に関 する研究,横浜国立大学卒業論文(2010)
![Fig. 1 The exterior of FTB Fig. 2 Layout of the thrusters Table 1 Elements of FTB Weight[kg] Dry 71.3 Wet 93.3 Center of gravity(x, y, z)[m] (0.0112, 0.0085, 0.2286) Injection Delay[ms] ON 45 OFF 80 Cant[deg] 0~20(Nominal 15) UAV を用いた FTB の](https://thumb-ap.123doks.com/thumbv2/123deta/6035937.583688/1.892.453.813.719.1151/FigTheFigLayoutTableElementsWeightkgDryWetCenter5286InjectionDelaymsON45OFF8Cantdeg~2Nominal15UAV用い.webp)

![Fig. 11 Hanging Experiment Table. 7 Thrust Error Rotor Number 7.4[V] 8.4[V] 50[%] 100[%] 50[%] 100[%] #1[g] 35 89 40 103 #2[g] 36 77 35 107 #3[g] 31 87 41 106 #4[g] 36 92 37 102 #5[g] 34 90 38 107 #6[g] 33 89 41 106](https://thumb-ap.123doks.com/thumbv2/123deta/6035937.583688/6.892.89.436.433.1143/fig-hanging-experiment-table-thrust-error-rotor-number.webp)
