平成
26
年度
修士学位論文
両眼立体視における
3
次元空間移動時の
奥行き恒常性
Stereo shape constancy with active and passive
movement
1175068
大久保 克哉
指導教員
繁桝 博昭
2015
年
2
月
27
日
高知工科大学大学院 工学研究科 基盤工学専攻
情報システム工学コース
要 旨
両眼立体視における
3
次元空間移動時の奥行き恒常性
大久保 克哉
現在,3D映像はVRなどの普及により身近なものとなっている.この3D映像は,両眼 視差のある映像を提示することにより実現しているが,両眼視差は対象までの距離の2乗に 反比例して変化するため,同じ物体でも観察距離が変われば両眼視差は大きく変化する.し かし,大きさの恒常性と同様に.奥行きもある程度は恒常性が保たれると考えられる.これ まで近距離において観察者が静止した状態で対象が奥行き方向に移動したときに知覚される 奥行き恒常性については検討されているが,遠距離での対象が奥行き方向に移動したときに 知覚される奥行き恒常性及び,観察者の能動的な移動に伴った両眼視差の変化による奥行き 恒常性については検討されていない. 本研究では,先行研究の効果が視差の小さい遠距離条件や観察者の能動的な移動にも一般 化されるかを検討するために遠距離において対象が奥行き方向に移動したときに物体内の奥 行きが変わらず一定に知覚される条件と観察者の能動的な移動時の物体内の奥行きが変わら ず一定に知覚される条件を検討した.そのさい,移動前と移動後に刺激が提示される 2フ レーム条件と移動に伴い刺激の奥行きが連続的に変化する連続提示条件を設定し,その効果 も検討した. 実験の結果,刺激が奥行き方向に移動する場合と観察者が能動的に移動する場合にかかわ らず奥行きが過大視されることが示され,遠距離の場合や能動的移動の場合でも先行研究と両眼視差自体が大きくなることによるものであることが示唆された.また,結果からリアル タイムな視差の変化はどちらの条件においても奥行き恒常性を保つことには貢献しないこと が明らかとなった.
Abstract
Stereo shape constancy with active and passive movement
Katsuya Okubo
It will become more usual for observers to move while observing 3D images as virtual reality becomes widely used. The stereoscopic 3D perception is achieved by presenting images with binocular disparity and the binocular disparity changes inversely with the square of the viewing distance. Thus, even if we see the same object, the retinal disparity changes according to the viewing distance. Although previous study investigated the depth scaling when the target object is moved in the direction of depth in near distance, little is known how we perceive the depth of disparity-defined objects in far distance when we passively see the objects coming closer or actively move toward the objects. The purpose of this study is to investigate the shape constancy from binocular disparity with object motion or self-motion at far distance in which the disparity becomes small examining the point of subjective equality of depth within object. In addition, to examine the effect of a continuous change of disparity in real time during the objects’or the observers’movement, we set the condition which showed the object with continuous change of disparity and the condition which showed only two static frames at the timing of the start and end of the movement. The results showed that in any conditions, the depth of the object which appeared to be constant was smaller than the theoretical
correlation among them, it is plausible that the result may be caused by the increase of disparity. Also this result suggests that the continuous and gradual change of disparity does not have a significant effect on accurate depth scaling.
key words Binocular disparity,Shape constancy, viewing distance, depth, move-ment, random dot stereogram
目次
第1章 はじめに 1 1.1 背景. . . 1 1.2 両眼視差 . . . 2 1.3 奥行き恒常性 . . . 4 1.4 観察距離と奥行き知覚 . . . 4 1.5 目的. . . 5 第2章 実験方法 7 2.1 被験者 . . . 7 2.2 装置. . . 7 2.3 刺激. . . 10 2.4 手続き . . . 12 2.4.1 実験1の2フレーム条件 . . . 12 2.4.2 実験1の連続提示条件. . . 13 2.4.3 実験2の2フレーム条件 . . . 15 2.4.4 実験2の連続提示条件. . . 16 2.4.5 実験3の2フレーム条件 . . . 18 2.4.6 実験3の連続提示条件. . . 18 第3章 結果 20目次 3.2 実験2 . . . 29 3.2.1 2フレーム条件 . . . 29 3.2.2 連続提示条件 . . . 33 3.2.3 条件間の結果 . . . 37 3.2.4 奥行き知覚と知覚された移動距離の相関 . . . 37 3.2.5 実験3 . . . 39 3.2.6 2フレーム条件 . . . 39 3.2.7 連続提示条件 . . . 43 3.2.8 条件間の結果 . . . 47 3.3 考察. . . 47 第4章 まとめ 49 謝辞 50 参考文献 51
図目次
1.1 両眼視差[6] . . . 2 1.2 両眼視差の幾何学的表示[10] . . . 3 1.3 距離の違いによる奥行き知覚 . . . 5 2.1 3DDLPプロジェクター(InFocus DepthQ HD) . . . 8 2.2 プロジェクタースクリーン(KIC ES-120W) . . . 8 2.3 CRTディスプレイ(EIZO社,FlexScan) . . . 8 2.4 キーボード(Logicool 社,K270) . . . 8 2.5 液晶シャッター眼鏡(NuVision社,60GX). . . 9 2.6 3Dエミッタ(NuVision社,60GX-T50). . . 9 2.7 磁気式3次元位置計測装置(POLHEMUS社,FASTRAK). . . 9 2.8 顎台 . . . 9 2.9 刺激の模式図 . . . 11 2.10 左眼用刺激 . . . 11 2.11 右眼用刺激 . . . 11 2.12 注視点 . . . 11 2.13 実験1 . . . 14 2.14 実験2 . . . 17 2.15 実験3 . . . 19図目次 3.5 被験者Dの実験1の2フレーム条件結果. . . 23 3.6 被験者Eの実験1の2フレーム条件結果 . . . 23 3.7 実験1の連続提示条件結果 . . . 25 3.8 被験者Aの実験1の連続提示条件結果 . . . 25 3.9 被験者Bの実験1の連続提示条件結果 . . . 26 3.10 被験者Cの実験1の連続提示条件結果 . . . 26 3.11 被験者Dの実験1の連続提示条件結果 . . . 27 3.12 被験者Eの実験1の連続提示条件結果 . . . 27 3.13 移動後における奥行きの主観的等価点 . . . 28 3.14 実験2の2フレーム条件結果 . . . 29 3.15 被験者Aの実験2の2フレーム条件結果. . . 30 3.16 被験者Bの実験2の2フレーム条件結果 . . . 30 3.17 被験者Cの実験2の2フレーム条件結果 . . . 31 3.18 被験者Dの実験2の2フレーム条件結果. . . 31 3.19 被験者Eの実験2の2フレーム条件結果 . . . 32 3.20 実験2の連続提示条件結果 . . . 33 3.21 被験者Aの実験2の連続提示条件結果 . . . 34 3.22 被験者Bの実験2の連続提示条件結果 . . . 34 3.23 被験者Cの実験2の連続提示条件結果 . . . 35 3.24 被験者Dの実験2の連続提示条件結果 . . . 35 3.25 被験者Eの実験2の連続提示条件結果 . . . 36 3.26 移動後における奥行きの主観的等価点 . . . 37 3.27 実験2の連続提示条件結果 . . . 38 3.28 実験3の2フレーム条件結果 . . . 39 3.29 被験者Aの実験3の2フレーム条件結果. . . 40 3.30 被験者Bの実験3の2フレーム条件結果 . . . 40
図目次 3.31 被験者Cの実験3の2フレーム条件結果 . . . 41 3.32 被験者Dの実験3の2フレーム条件結果. . . 41 3.33 被験者Eの実験3の2フレーム条件結果 . . . 42 3.34 実験3の連続提示条件結果 . . . 43 3.35 被験者Aの実験3の連続提示条件結果 . . . 44 3.36 被験者Bの実験3の連続提示条件結果 . . . 44 3.37 被験者Cの実験3の連続提示条件結果 . . . 45 3.38 被験者Dの実験3の連続提示条件結果 . . . 45 3.39 被験者Eの実験3の連続提示条件結果 . . . 46 3.40 移動後における奥行きの主観的等価点 . . . 47
第
1
章
はじめに
1.1
背景
現在,VRや3D映画の普及により,3D映像は身近なものとなっている.また,3D映像 の普及に伴い,観察者が 3次元空間内を移動しながら3D映像を視聴する機会が増加して いる. 3D映像は,両眼視差のある映像を提示することで実現しているが,両眼視差から奥行き を算出するには,両眼間の距離と対象までの距離(観察距離)の情報が必要である [1][2]. そのため両眼視差は観察距離に依存して変化するため,同じ物体でも観察者と対象までの距 離が変われば両眼視差の大きさも変化する. 近距離においては対象が観察者に近づくように奥行き方向に移動する場合と観察者が対象 に近づくように奥行き方向に移動する場合のどちらにおいても奥行きが過大視されるという 報告がある[3][4][5].しかし,遠距離での対象が奥行き方向に移動したときに知覚される奥 行き恒常性及び,観察者の能動的な移動に伴った両眼視差の変化による奥行き恒常性につい ては検討されていない.次節ではこの両眼視差が生じる仕組みや,観察距離に伴った両眼視 差の幾何学的特性を述べる.1.2 両眼視差
1.2
両眼視差
図1.1 両眼視差[6] 人間は右眼だけで対象を見たときと左眼だけで対象を見たときでは,見える像は少し異 なっている.この左右の眼による見えの違いのことを両眼視差という.これは,左右の眼の 位置が水平方向に約6 cm ほど離れて位置しているために生じるものである.ずれを検出す る能力は副尺視力を検出し,通常視力値に換算すると約10倍に相当する高精度である.し かし,視差が大きくなると融像せず二重像に見え,前後差の弁別が難しくなる [7].この両 眼視差は空間知覚の強力な手がかりとなっており[8],3Dディスプレイ多くも両眼に異なる 画像を提示することで奥行きのある映像を実現している[9].1.2 両眼視差 図1.2 両眼視差の幾何学的表示[10] 図1.2はこの両眼視差が生じる幾何学的特性を示したものである.F とQは2つの対象 であり,下部の円弧が両眼の網膜を示している.網膜の少し上の交点が両眼の水晶体の中心 を示している.Iは左眼と右眼の距離で,個人差はあるが約6 cmとなっている.対象F1ま での距離がD,F とQまでの距離の差が ΔDである.図1.2のような対象の位置の場合, 左眼にはF とQ の対象の隔たりが広く,右眼には狭く映る.視角で表した場合には,左 眼はΘ1,右眼はΘ2 の間隔になる.この左眼のΘ1 と右眼のΘ2 の差 ΔΘが両眼視差であ る.これを数式にすると, ΔΘ = Θ1− Θ2 = α2− α1 ≒( a D −ΔD)− a D ≒ aΔD D2 (ラジアン) = 206265aΔD D2 (秒)
1.3 奥行き恒常性 この式の ΔD が小さい場合には,近似的に距離の2乗に反比例して変化する[11].しかし, 視覚系がこの式の予測どおりに奥行きを計算しているかどうかは明らかとなっていない.
1.3
奥行き恒常性
網膜上では変化しているにもかかわらず知覚された外界の様々な特性が恒常性を保つ現象 を知覚恒常性という.知覚恒常性には,大きさの恒常性や形の恒常性,色の恒常性などがあ る.この知覚恒常性は奥行きにも存在する(奥行き恒常性機構).両眼視差や単眼運動視差 に基づく奥行きを観察距離情報からスケーリングする機構である.中溝・下野の研究では両 眼視差が 6分,12分,18分のランダムドット刺激を用いて,観察距離4 m までの知覚さ れた奥行き量を再生法によって測定した結果,4 m ほどの距離まで奥行きの恒常性が保た れていることがわかった.このことから曖昧な情報であっても,脳は網膜像の大きさや両眼 視差を観察距離の情報を用いて変換することで,正確な奥行きを知覚していることがわかる [12].1.4
観察距離と奥行き知覚
人間や動物が生活する中で,自己の身体から対象までの距離の正確な情報を得ることは非 常に重要である.距離知覚の確度は,どの距離手がかりを利用するかに依存する.距離手が かりには,眼球運動性手がかり,熟知している大きさの手がかり,垂直網膜像差手がかり, 絶対運動視差手がかりがある.距離手がかりが豊富な日常的な環境では距離知覚の確度は高 く,距離手がかりが僅少な環境では距離知覚の確度は低い[13].両眼視差や運動視差などの 奥行き方向と奥行き量の情報を持つ奥行き手がかりに基づき知覚される奥行きスケーリング1.5 目的 図1.3 距離の違いによる奥行き知覚 図1.3では,観察距離の見積もりによって同じ両眼視差でも知覚される奥行き構造は異な ることを示している. このように観察距離情報は両眼立体視における2点間の相対的な奥行き差や対象の奥行 き構造知覚にとって重要な情報である.観察者あるいは対象が移動する場合には,視覚系は 観察距離情報を絶えずモニターし,両眼視差の変化に応じて奥行きを復元していると考えら れる.しかし,対象が奥行き方向に移動したときには,対象までの距離が明示的であっても 奥行き構造が正しく知覚されないという報告がある[3].また,観察距離の増加にともない, 奥行き方向に3次元形状が知覚されることが確認され,3次元形状のゆがみは単純に観察距 離の評価の誤りが原因ではないという報告がある[14].
1.5
目的
本研究では,先行研究の近距離における対象あるいは観察者が奥行き方向に移動した時に 生じる奥行きの過大視が,両眼視差の小さい遠距離条件や観察者の能動的な移動にも一般化 されるかを検討するために遠距離において対象が奥行き方向に移動したときに物体内の奥行 きが変わらず一定に知覚される条件(対象移動条件)と観察者の能動的な移動時の物体内の 奥行きが変わらず一定に知覚される条件(観察者移動条件)について検討した.先行研究の 近距離で対象が移動した場合の実験を近距離で観察者が移動した場合の条件で行い,先行研1.5 目的
究と同様の傾向が見られるかも検討した.また,両眼視差のリアルタイムな変化自体の効果 も検討するため,移動前と移動後に刺激が提示される2フレーム条件と移動に伴い刺激の奥 行きが連続的に変化する連続提示条件を設定した.
第
2
章
実験方法
2.1
被験者
被験者は正常な視力(矯正含む)の20代男性5名で行った,すべての被験者に同意書に 署名した上で実験した.2.2
装置
本実験では,刺激の作成制御にはMATLAB+Psychtoolbox を使用した.実験1,2では 刺激の提示に3DDLPプロジェクター(InFocus DepthQ HD, 120 Hz) とプロジェクター スクリーン (KIC ES-120W),実験 3では,21 インチの CRT ディスプレイ(EIZO 社,FlexScan T961,1024×768pixel,120Hz)を用いた.3D映像を視聴するために液晶シャッ ター眼鏡(NuVision 社,60GX)とワイヤレス3Dエミッタ(NuVision 社,60GX-T50) を使用した.奥行きの増減を回答にはキーボード(Logicool社,K270)を使用した.実験2 では,リアルタイムな位置情報を取得するために磁気式3次元位置計測装置(POLHEMUS 社,FASTRAK)を使用した.また,外界の情報が実験の結果に影響を及ぼさないように暗 室の中で行った.実験3では,頭を固定するために顎台を使用した.
2.2 装置 図 2.1 3DDLP プ ロ ジェク タ ー (InFocus DepthQ HD) 図2.2 プロジェクタースクリーン (KIC ES-120W) 図2.3 CRTディスプレイ(EIZO 社,FlexScan) 図2.4 キーボード(Logicool社,K270)
2.2 装置 図2.5 液晶シャッター眼鏡( NuVi-sion 社,60GX) 図2.6 3Dエミッタ(NuVision社, 60GX-T50) 図2.7 磁気式3次元位置計測装置 (POLHEMUS社,FASTRAK) 図2.8 顎台
2.3 刺激
2.3
刺激
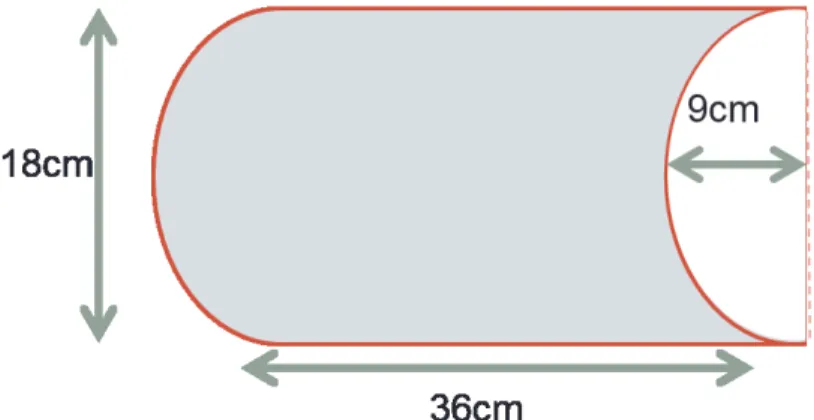
実験1,2ではサイズが縦18 cm,横36 cm,実験3ではサイズが縦6 cm,横12 cm の 円筒状のランダムドットステレオグラムの刺激を使用した.実験1,2の刺激の視角は,観 察距離270 cm のとき縦3.82 deg,横 7.63 deg,観察距離180 cm のとき縦5.72 deg,横
11.42 deg である.実験 3の刺激の視角は,観察距離 90 cm のとき縦 3.82 deg,横 7.63 deg,観察距離60 cmのとき縦5.72 deg,横11.42 deg である.背景の色は黒,ドットの色 は白とした.オブジェクト内に存在するドットの数は2000と設定した.実験1,2では観察 距離270 cm の条件のとき,物理的奥行きは9 cm にシミュレートし,観察距離180 cm の 条件のとき,物理的奥行きを4.5,6.0,7.5,9.0,10.5,12.0,13.5 cm の7水準にシミュ レートした刺激を用意した.連続提示条件では試行毎に奥行きが観察距離180 cm のときに 7水準の奥行きのどれかとなるよう奥行きが変化する.実験3では観察距離90 cm の条件 のとき,物理的奥行きは3 cm にシミュレートし,観察距離 60 cm の条件のとき,物理的 奥行きを1.5,2.0,2.5,3.0,3.5,4.0,4.5 cm の7水準にシミュレートした刺激を用意し た.連続提示条件では試行毎に奥行きが観察距離60 cm のときに7水準の奥行きのどれか となるよう奥行きが変化する. 実際に使用した刺激例は図2.2 と図2.3 である.刺激の奥行き手がかりは両眼性の手がか りである両眼視差のみであるため,2つの刺激には少しずれが生じていて,この刺激を液晶 シャッター眼鏡をかけて観察することにより,右眼には右眼用の刺激,左眼には左眼用の刺 激のみを観察することで奥行きのある刺激を知覚することができる.実験にはスクリーンか ら眼を離さないようにするため,十字の注視点を設けた.注視点の色は赤,サイズは実験1, 2は縦1.69 cm,横1.69 cm,実験3は縦1.125cm,横1.125 cm とした.
2.3 刺激
図2.9 刺激の模式図
図2.10 左眼用刺激 図2.11 右眼用刺激
2.4 手続き
2.4
手続き
2.4.1
実験
1
の
2
フレーム条件
被験者は,暗室内で液晶シャッター眼鏡を装着し,観察距離270 cm の位置に直立した. 注視点が提示され,テンキーの5を押すと注視点が消え,観察距離270 cm の位置から奥行 き9 cm にシミュレートした刺激が1.5 s 提示され観察した.1.5 s後,刺激が消え,注視点 を提示した.このときの注視点は次の刺激の融像が容易となるように観察距離270 cmの位 置から観察距離180 cm の位置に提示したまま移動するようにシミュレートした.注視点が 消えた後,観察距離180 cm の位置,すなわち被験者側に90 cm 移動したことをシミュレー トした刺激を1.5 s 提示した.このとき提示される刺激は観察距離180 cm のときにシミュ レートした7水準いずれかの奥行きとなるよう設定した.1.5 s 後刺激の提示が消え,刺激 の移動後の奥行きと移動前の奥行きを比較し,移動後の刺激の方が奥行きが増加したか,減 少したかを2肢強制選択で判断し,増加していると感じたらテンキーの6,減少していると 感じたらテンキーの4を押すことで回答した.回答を終了すると次の試行へと移った. 1セッションにつき7水準の刺激の判断課題を10試行繰り返し,3セッションで計210試 行行った.刺激の提示順はランダムであった.2.4 手続き
2.4.2
実験
1
の連続提示条件
被験者は,暗室内で液晶シャッター眼鏡を装着し,観察距離270 cm の位置に直立した. 注視点が提示され,テンキーの5を押すと注視点が消え,観察距離270 cm の位置から奥行 き9 cm にシミュレートした刺激が提示され1.5 s 観察した.観察の後,刺激は試行毎に奥 行きが観察距離180 cmの位置のときにシミュレートした7水準のいずれかとなるよう連続 的に視差が変化するように設定した.刺激が観察距離180 cm の位置に到達すると被験者は 1.5 s 観察した.1.5 s 後刺激の提示は終了し,被験者は刺激の移動後に観察した奥行きと刺 激の移動前の奥行きを比較し,移動後の奥行きが増加したか,減少したかを2肢強制選択で 判断し,増加していると感じたらテンキーの6,減少していると感じたらテンキーの4を押 すことで回答した.回答を終了すると次の試行へと移った. 1セッションにつき7水準の刺激の判断課題を10試行繰り返し,3セッションで計210試 行行った.刺激の提示順はランダムであった.2.4 手続き
2.4 手続き
2.4.3
実験
2
の
2
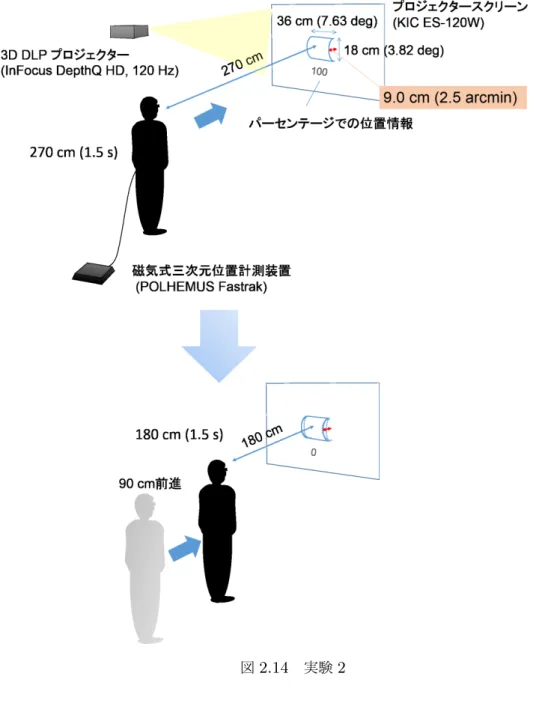
フレーム条件
被験者は,暗室内で液晶シャッター眼鏡と磁気式3次元位置計測装置のレシーバーを装着 し,観察距離270 cm の位置に直立した.注視点が提示され,テンキーの5を押すと注視点 が消え,観察距離270 cm の位置から奥行き9 cm にシミュレートした刺激が提示され1.5 s 観察した.刺激が消えた後注視点が提示され,観察距離180 cmの位置に移動した.観察距 離180 cm の位置がわかるように注視点の下にパーセンテージで位置情報を提示した.この パーセンテージは観察距離270 cm のときに100%,観察距離180 cm のときに0%となる ように設定した.観察距離180 cm の位置で刺激を1.5 s 観察した.このときの刺激は試行 毎に奥行きが観察距離180 cm の位置のときにシミュレートした7水準のいずれかの奥行き となるように設定した.移動後に観察した刺激の奥行きと移動前の刺激の奥行きを比較し, 移動後の刺激の方が奥行きが増加したか,減少したかを2肢強制選択で判断し,増加してい ると感じたらテンキーの6,減少していると感じたらテンキーの4を押した.回答を終了す ると次の試行へと移った. 1セッションにつき7水準の刺激の判断課題を10試行繰り返し,3セッションで計210試 行行った.刺激の提示順はランダムであった.2.4 手続き
2.4.4
実験
2
の連続提示条件
被験者は,暗室内で液晶シャッター眼鏡と磁気式3次元位置計測装置のレシーバーを装着 し,観察距離270 cm の位置に直立した.注視点が提示され,テンキーの5を押すと注視点 が消え,観察距離270 cm の位置から奥行き9 cm にシミュレートした刺激が提示され1.5 s 観察し,観察距離180 cm の位置に移動した.移動中も刺激は提示されており,刺激の奥 行きは3次元位置計測装置から取得した位置情報によって被験者の移動に同期して奥行きを 変化させた.観察距離180 cm の位置がわかるように刺激の下にパーセンテージで位置情報 を提示した.このパーセンテージは観察距離270 cm のときに100%,観察距離180 cm の ときに0%となるように設定した.観察者はパーセンテージの数字を参考に180 cm の位置 へ移動した.観察距離180 cm の位置に移動後,刺激は1.5 s で消え,移動後に観察した刺 激の奥行きと移動前の刺激の奥行きを比較し,移動後の刺激の方が奥行きが増加したか,減 少したかを2肢強制選択で判断し,増加していると感じたらテンキーの6,減少していると 感じたらテンキーの4を押した.回答を終了すると次の試行へと移った. 1セッションにつき7水準の刺激の判断課題を10試行繰り返し,3セッションで計210試 行行った.刺激の提示順はランダムであった.2.4 手続き
2.4 手続き
2.4.5
実験
3
の
2
フレーム条件
被験者は暗室内で着席し,液晶シャッター眼鏡を装着した.観察距離90 cmの位置で顎台 の上に顎を乗せ頭の位置を固定した.注視点が提示され,テンキーの5を押すと注視点が消 え,観察距離90 cmの位置から奥行き3 cm にシミュレートした刺激が1.5 s提示され観察 した.1.5 s 後,刺激が消え,注視点を提示した.このときの注視点は次の刺激の融像が容 易となるように観察距離90 cm の位置から観察距離60 cm の位置に提示したまま移動する ようにシミュレートした.注視点が消えた後,観察距離60 cm の位置,すなわち被験者側 に30 cm 移動したことをシミュレートした刺激を1.5 s提示した.このとき提示される刺激 は観察距離60 cm のときにシミュレートした7水準いずれかの奥行きとなるよう設定した. 1.5 s 後刺激の提示が消え,刺激の移動後の奥行きと移動前の奥行きを比較し,移動後の刺 激の方が奥行きが増加したか,減少したかを2肢強制選択で判断し,増加していると感じた らテンキーの6,減少していると感じたらテンキーの4を押すことで回答した.回答を終了 すると次の試行へと移った. 1セッションにつき7水準の刺激の判断課題を10試行繰り返し,3セッションで計210試 行行った.刺激の提示順はランダムであった.2.4.6
実験
3
の連続提示条件
被験者は暗室内で着席し,液晶シャッター眼鏡を装着した.観察距離90 cmの位置で顎台 の上に顎を乗せ頭の位置を固定した.注視点が提示され,テンキーの5を押すと注視点が消 え,観察距離90 cmの位置から奥行き3 cm にシミュレートした刺激が提示され1.5 s観察 した.観察の後,刺激は試行毎に奥行きが観察距離180 cm の位置のときにシミュレートし2.4 手続き していると感じたらテンキーの 4を押すことで回答した.回答を終了すると次の試行へと 移った. 1セッションにつき7水準の刺激の判断課題を10試行繰り返し,3セッションで計210試 行行った.刺激の提示順はランダムであった. 図2.15 実験3
第
3
章
結果
3.1
実験
1
3.1.1
2
フレーム条件
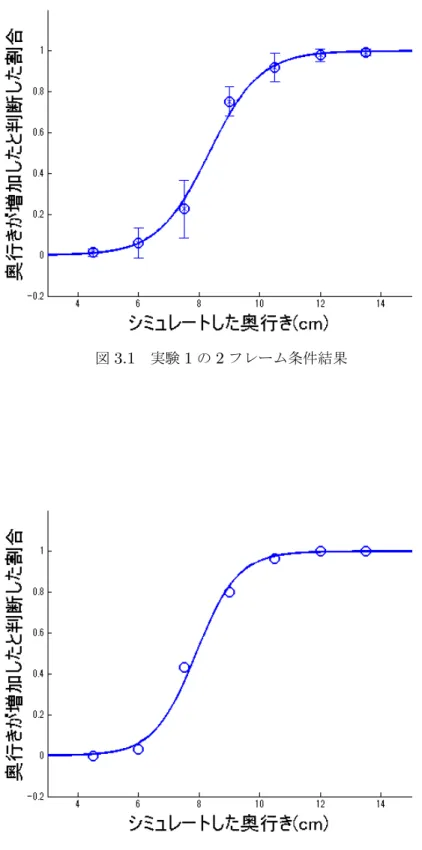
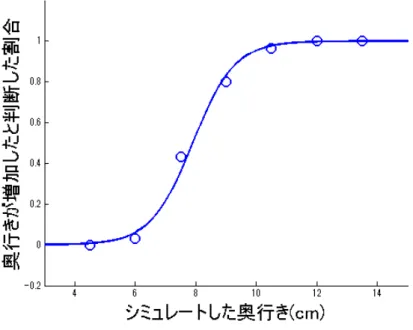
被験者5名の移動後の刺激の奥行きの水準ごとに奥行きが増加して知覚された割合をプ ロビット曲線でフィッティングしたものを図3.1,被験者ごとの移動後の刺激の奥行きの水 準ごとに奥行きが増加して知覚された割合をプロビット曲線でフィッティングしたものを図 3.2から図3.6に示す.グラフの縦軸は奥行きが増加したと判断した割合,横軸を観察距離 180 cm でシミュレートした奥行きである. 縦軸の奥行きが増加したと判断した割合の0.5は,移動前と比べて奥行きが増加したか減 少したか判断できなかった点であるので奥行きが移動前の奥行きと同じに知覚される主観 的等価点とした.主観的等価点は8.3 cm となり,9 cm よりも有意に小さい値になった(t (4) = 4.82,p < .05).3.1 実験1
図3.1 実験1の2フレーム条件結果
3.1 実験1
3.1 実験1
図3.5 被験者Dの実験1の2フレーム条件結果
3.1 実験1 表3.1 被験者ごとの主観的等価点 被験者 主観的等価点 被験者A 7.9 被験者B 8.3 被験者C 8.2 被験者D 8.5 被験者E 8.8
3.1.2
連続提示条件
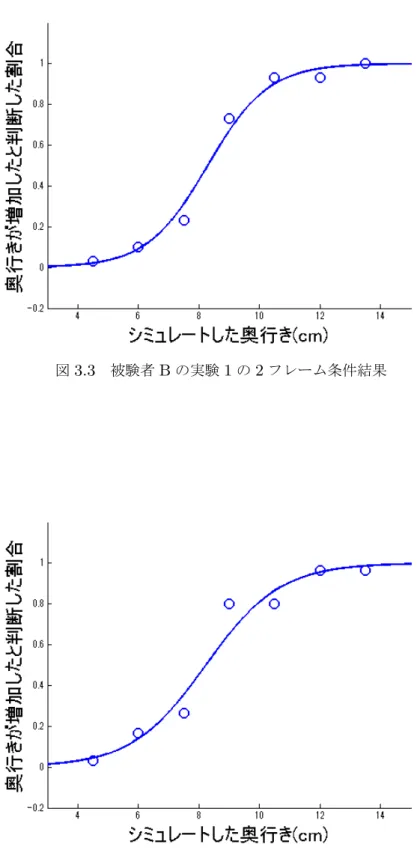
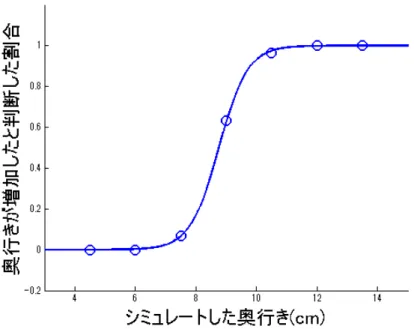
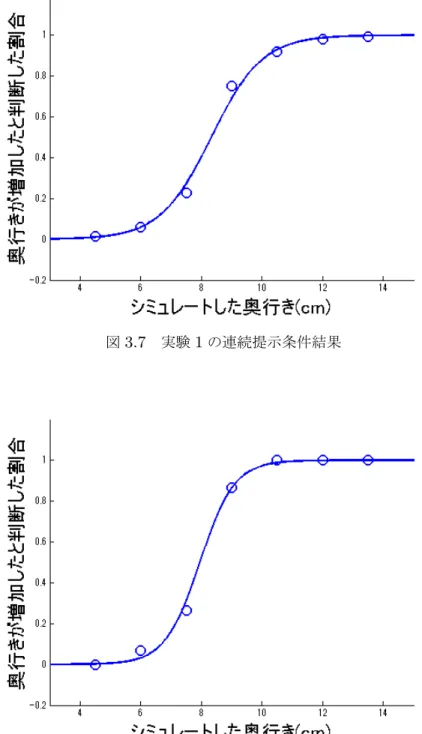
被験者5名の移動後の刺激の奥行きの水準ごとに奥行きが増加して知覚された割合をプ ロビット曲線でフィッティングしたものを図3.7,被験者ごとの移動後の刺激の奥行きの水 準ごとに奥行きが増加して知覚された割合をプロビット曲線でフィッティングしたものを図 3.8から図3.12に示す.グラフの縦軸は奥行きが増加したと判断した割合,横軸を観察距離 180 cm でシミュレートした奥行きである. 縦軸の奥行きが増加したと判断した割合の0.5は,移動前と比べて奥行きが増加したか減 少したか判断できなかった点であるので奥行きが移動前の奥行きと同じに知覚される主観的 等価点とした.移動前の観察距離270 cm 時と同じ奥行きにシミュレートした9 cm では, 奥行きが増加したと判断した割合が高くなっていることがわかる.主観的等価点は8.4 cm となり,9 cm と有意な差は認められなかったが(t(4)= 2.19,p = 0.07),奥行きを過 大視する傾向が見られた.3.1 実験1
図3.7 実験1の連続提示条件結果
3.1 実験1
3.1 実験1
図3.11 被験者Dの実験1の連続提示条件結果
3.1 実験1 表3.2 被験者ごとの主観的等価点 被験者 主観的等価点 被験者A 7.9 被験者B 7.7 被験者C 8.8 被験者D 8.2 被験者E 9.3
3.1.3
条件間の結果
実験1の移動後における奥行きの主観的等価点を図3.13に示す.実験1では2フレーム 条件と連続提示条件の間に優位な差は認められなかった.3.2 実験2
3.2
実験
2
3.2.1
2
フレーム条件
被験者5名の移動後の刺激の奥行きの水準ごとに奥行きが増加して知覚された割合をプ ロビット曲線でフィッティングしたものを図3.34,被験者ごとの移動後の刺激の奥行きの水 準ごとに奥行きが増加して知覚された割合をプロビット曲線でフィッティングしたものを図 3.35から図3.39に示す.グラフの縦軸は奥行きが増加したと判断した割合,横軸を観察距 離180 cm でシミュレートした奥行きである. 縦軸の奥行きが増加したと判断した割合の0.5は,移動前と比べて奥行きが増加したか減 少したか判断できなかった点であるので奥行きが移動前の奥行きと同じに知覚される主観的 等価点とした.主観的等価点は8.7 cm となり,9 cm と有意な差は認められなかったが(t (4) = -1.46,p = 0.19),奥行きが過大視される傾向が見られた. 図3.14 実験2の2フレーム条件結果3.2 実験2
3.2 実験2
図3.17 被験者Cの実験2の2フレーム条件結果
3.2 実験2 図3.19 被験者Eの実験2の2フレーム条件結果 表3.3 被験者ごとの主観的等価点 被験者 主観的等価点 被験者A 8.3 被験者B 8.0 被験者C 8.9
3.2 実験2
3.2.2
連続提示条件
被験者5名の移動後の刺激の奥行きの水準ごとに奥行きが増加して知覚された割合をプ ロビット曲線でフィッティングしたものを図3.20,被験者ごとの移動後の刺激の奥行きの水 準ごとに奥行きが増加して知覚された割合をプロビット曲線でフィッティングしたものを図 3.21から図3.25に示す.グラフの縦軸は奥行きが増加したと判断した割合,横軸を観察距 離180 cm でシミュレートした奥行きである. 縦軸の奥行きが増加したと判断した割合の0.5は,移動前と比べて奥行きが増加したか減 少したか判断できなかった点であるので奥行きが移動前の奥行きと同じに知覚される主観 的等価点とした.主観的等価点は8.0 cm となり,9 cm よりも有意に小さい値になった(t (4) = -6.58,p < .05). 図3.20 実験2の連続提示条件結果3.2 実験2
3.2 実験2
図3.23 被験者Cの実験2の連続提示条件結果
3.2 実験2 図3.25 被験者Eの実験2の連続提示条件結果 表3.4 被験者ごとの主観的等価点 被験者 主観的等価点 被験者A 7.7 被験者B 8.1 被験者C 8.2
3.2 実験2
3.2.3
条件間の結果
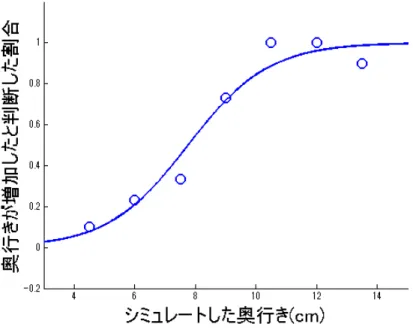
実験2の移動後における奥行きの主観的等価点を図3.40に示す.2フレーム条件と連続 提示条件の間に有意な差が認められた(t(4)= 2.53,p < .05)が,連続提示条件の方が より過大視するという結果となった. 図3.26 移動後における奥行きの主観的等価点3.2.4
奥行き知覚と知覚された移動距離の相関
本実験において過大視が生じた要因として観察距離の知覚の誤りが考えられるため,被験 者5名に実験2の終了後に移動距離の体感を回答してもらった.表3.7にそれぞれの被験者 の移動距離の体感を示す.この表から3名は実際の移動距離よりも短く感じ,2名は長く感 じていることがわかる. 図3.27は実験2で得られた結果である奥行き知覚と実験終了後に回答してもらった移動 距離の体感の関係を示している.移動距離の体感と移動前と同じに知覚される奥行きには, 相関は見られなかった.3.2 実験2 表3.5 移動距離の体感 被験者 移動距離の体感(cm) 被験者A 80 被験者B 80 被験者C 70 被験者D 100 被験者E 100
3.2 実験2
3.2.5
実験
3
3.2.6
2
フレーム条件
被験者5名の移動後の刺激の奥行きの水準ごとに奥行きが増加して知覚された割合をプ ロビット曲線でフィッティングしたものを図3.34,被験者ごとの移動後の刺激の奥行きの水 準ごとに奥行きが増加して知覚された割合をプロビット曲線でフィッティングしたものを図 3.35から図3.39に示す.グラフの縦軸は奥行きが増加したと判断した割合,横軸を観察距 離60 cm でシミュレートした奥行きである. 縦軸の奥行きが増加したと判断した割合の0.5は,移動前と比べて奥行きが増加したか減 少したか判断できなかった点であるので奥行きが移動前の奥行きと同じに知覚される主観 的等価点とした.主観的等価点は2.7 cm となり,3 cm よりも有意に小さい値になった(t (4) = 6.18,p < .01). 図3.28 実験3の2フレーム条件結果3.2 実験2
3.2 実験2
図3.31 被験者Cの実験3の2フレーム条件結果
3.2 実験2 図3.33 被験者Eの実験3の2フレーム条件結果 表3.6 被験者ごとの主観的等価点 被験者 主観的等価点 被験者A 2.8 被験者B 2.7 被験者C 2.7
3.2 実験2
3.2.7
連続提示条件
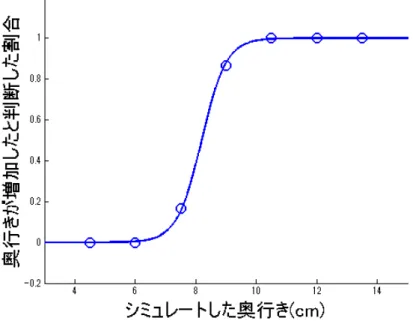
被験者5名の移動後の刺激の奥行きの水準ごとに奥行きが増加して知覚された割合をプ ロビット曲線でフィッティングしたものを図3.34,被験者ごとの移動後の刺激の奥行きの水 準ごとに奥行きが増加して知覚された割合をプロビット曲線でフィッティングしたものを図 3.35から図3.39に示す.グラフの縦軸は奥行きが増加したと判断した割合,横軸を観察距 離60 cm でシミュレートした奥行きである. 縦軸の奥行きが増加したと判断した割合の0.5は,移動前と比べて奥行きが増加したか減 少したか判断できなかった点であるので奥行きが移動前の奥行きと同じに知覚される主観的 等価点とした.主観的等価点は2.7 cm となり,3 cm よりも有意に小さい値になったた(t (4) = 5.76,p < .01). 図3.34 実験3の連続提示条件結果3.2 実験2
3.2 実験2
図3.37 被験者Cの実験3の連続提示条件結果
3.2 実験2 図3.39 被験者Eの実験3の連続提示条件結果 表3.7 被験者ごとの主観的等価点 被験者 主観的等価点 被験者A 2.9 被験者B 2.7 被験者C 2.6
3.3 考察
3.2.8
条件間の結果
実験3の移動後における奥行きの主観的等価点を図3.40に示す.2フレーム条件と連続 提示条件の間に有意な差は認められなかった(p < .05). 図3.40 移動後における奥行きの主観的等価点3.3
考察
実験1,2の結果から刺激が奥行き方向に移動する場合の2フレーム条件と連続提示条件, 観察者が能動的に移動する場合の2フレーム条件と連続提示条件のどの条件においても奥行 きが過大視されることが示され,遠距離の場合や能動的移動の場合でも先行研究と同様の傾 向が認められた.この結果から,両眼視差自体が大きくなることによる影響,移動距離を短 く見積もっていることによる影響が考えられる.しかし,移動前と同じに知覚された奥行き と知覚された移動距離には,明確な関係が見られなかったことから,本研究において奥行き を大きく見積もる結果となったのは,移動距離を短く見積もっていたからではなく,両眼視 差自体が大きくなることによるものであることが示唆された. 実験3では,どちらの条件においても先行研究と同様に奥行きを過大視することが示され3.3 考察 た.これは近距離では視差自体の変化が大きいことが考えられる. 実験2の2フレーム条件と連続提示条件では,連続提示条件の方が観察者の移動自体の情 報が得られるためより正確な奥行き知覚になると考えられたが,実験の結果,連続提示条件 の方が奥行きをより過大視していることが明らかになった.また,実験1では2フレーム 条件と連続条件の間に有意な差は見られなかった.これは観察者の能動的な移動に伴う場合 にのみ奥行きがリアルタイムに変化することが,奥行き知覚に影響すると考えられる.ただ し,連続提示条件では奥行きをより過大視しており,少なくともリアルタイムな視差の変化 はどちらの条件においても奥行き恒常性を保つことには貢献しないことが明らかとなった. このことから正確な奥行きスケーリングには陰影やテクスチャなどの他の奥行き手がかりを 用いていることがわかった. 本研究の結果から,バーチャルリアリティや3D ゲームなどの3D 映像を観察しながら移 動をする場合や映像が奥行き方向に移動する場合,映像の奥行き手がかりが両眼視差のみで あれば奥行きを過大視してしまうため,テクスチャや陰影などの単眼奥行き手がかりを豊富 にすることで奥行き恒常性が保たれると考えられる.
第
4
章
まとめ
現在,3Dテレビなどの普及により3D映像が身近なものとなっており,3D映像を視聴す る機会が増えている.しかし,大きさの恒常性と同様に.奥行きもある程度は恒常性が保た れると考えられる.これまで近距離において観察者が静止した状態で対象が奥行き方向に移 動したときに知覚される奥行き恒常性については検討されているが,遠距離での対象が奥行 き方向に移動したときに知覚される奥行き恒常性及び,観察者の能動的な移動に伴った両眼 視差の変化による奥行き恒常性については検討されていない.本研究では遠距離において対 象が奥行き方向に移動したときに物体内の奥行きが変わらず一定に知覚される条件と観察者 の能動的な移動時の物体内の奥行きが変わらず一定に知覚される条件を検討した. 実験の結果,刺激が奥行き方向に移動する場合と観察者が能動的に移動する場合にかかわ らず奥行きが過大視されることが示され,遠距離の場合や能動的移動の場合でも先行研究と 同様の傾向が認められた.謝辞
本研究および論文作成にあたり,ご指導ご鞭撻を頂いた繁桝博昭先生に深く感謝いたしま す.また,副査を務めて頂いた篠森先生,妻鳥先生に感謝いたします.実験の際に被験者と して参加いただいた繁桝研究室,他研究室のみなさん,ありがとうございました.
参考文献
[1] Mayhew JE,Longuet-Higgins HC,A computational model of binocular depth perseption,(1982),Nature 297 pp.376-378
[2] Howard IP,Rogers BJ,Binocular Vision and Stereopsis,(1995),Oxford Univ Press
[3] P.Scarfe,P.B.Hibbard,Disparity-defined objects moving in depth do not elicit three-dimensional shape constancy.(2006),Vision Res.46(10),1599-610.
[4] Shigemasu H,Okubo K,Yan P,Shape constancy from binocular disparity with self-motion in depth,(2013),Perception 42 ECVP Abstract Supplement,pp.117 [5] 大久保克哉,Yan Pengfei,繁桝博昭,観察者移動時における奥行き恒常性,(2014),
Vision,26,(1),pp.59
[6] Gibson,J.J,The perception of the visual world,(1950),Houghton Miffilin [7] 立体視テクノロジー,(2008),エヌ・ティー・エス
[8] Howard IP,Depth perception,(2002),Seeing in Depth vol1,I Porteous [9] 内川惠二,塩入諭,視覚II,pp.84-85,(2007),朝倉書店
[10] Graham, C.H.(Ed.),Vision and visual perception,(1965),Wiley
[11] Ono,H.and Commerford,J,Stereoscopic depth constancy,(1977),Epstein,
W,Stability and constancy in visual perception,Wiley-Interscience Publication,
New York.
[12] 中溝幸夫,下野孝一,視覚系による絶対距離情報を用いた奥行きのスケーリング, (2001),Vision 13,pp.163-180
[13] Holway AH,Boring EG,Determinants of apparent visual size with distance vari-ant,American Journal of Psychology,(1941),54,pp21-37
参考文献 (2004),映像情報メディア学会誌 [15] 中溝幸雄,画像観察と視覚心理学,(2004),日本放射線技術學會雜誌 60(4),pp. 455-459 [16] 繁桝博昭,佐藤隆夫,書き割り効果のメカニズム,(2005),日本バーチャルリアリティ 学会論文誌,Vol.10,No.2 pp.249-256 [17] 大山正,視覚心理学への招待-見えの世界へのアプローチ-,(2000),サイエンス社 [18] 日本視覚学会,視覚情報処理ハンドブック,(2000),朝倉書店 [19] 北岡明佳,知覚心理学,(2011),ミネルヴァ書房