【報 文】
浮魚礁の振れ回り運動に関する模型実験
江 幡 恵 吾
1*・小 川 真一郎
1・不 破 茂
1・
藤 田 伸 二
2・北 野 潔
3Model Experiment on Movement of Drifting Fish Aggregating Devise
Keigo E
BATA1*, Shinichirou O
GAWA1, Shigeru F
UWA1,
Shinji F
UJITA2and Kiyoshi K
ITANO3Abstract
A fish aggregating device (FAD) is a floating construction installed at sea to attract and aggregate fish. Fishermen conduct an operation of troll lines to catch tuna and skipjack tuna in areas around FADs in southern Japan. It is very dangerous to catch fish near FADs because FADs are moving objects and can collide with fishing boats.
Model experiments using a 1/30 model (length 25.0 cm, width 13.0 cm, and height 11.7 cm) were carried out in a flume tank. The movements of the FAD were recorded in top view using a digital video camera. Video images were converted into static images every 1/30 seconds to measure the periods and the distances of the movement of FAD. The flow speed was changed from 9.4 cm/s (1.0 knot) to 28.8 cm/s (3.0 knots). 8 different size of boards were constructed and installed on the stern side to reduce the movement of the FAD. Amplitude of the movement of the FAD was reduced by installing a rectangular board at the bottom of the stern.
2014年10月6日受付,2015年9月18日受理
キーワード: 浮魚礁,模型実験,運動測定,振れ回り運動の抑制
Key words: Drifting fish aggregating device (FAD), Model experiment, Measurement of movement, Reduction of movement
1 Faculty of Fisheries, Kagoshima University, Shimoarata 4-50-20, Kagoshima, 890-0056, Japan(鹿児島大学水産学
部 〒890-0056 鹿児島市下荒田4丁目50-20)
2 Faculty of Fisheries, Nagasaki University, Bunkyo-cho 1-14, Nagasaki, 852-8131,
Japan(長崎大学水産学部 〒852-8131 長崎県長崎市文教町1-14)
3 Marine Bussiness Division, Okabe Co., Ltd, Oshiage 2-8-2, Sumida-ku, Tokyo, 131-8505, Japan(岡部株式会社海洋
事業部 〒131-8505 東京都墨田区押上2-8-2) * Tel:099-286-4231,Fax:099-286-4231,[email protected] 1. 緒 言 人工魚礁は魚類などの水産資源を集めることから,そ の周辺の海域は釣りなどの小規模漁業の漁場として利用 されており,浮体型のものは浮魚礁(パヤオ)と呼ばれ, マグロ,カツオ類などの表・中層の魚類を対象として, 海面または海中に係留される1)。日本国内において浮魚 礁の多くが,黒潮海域に設置されている2)。これまでに 浮魚礁の運動に関しては,係留索の切断による流出事故 を防ぐために安全に係留することを目的として,浮魚礁 に作用する波力と浮体の応答との関係3),浮体に作用す る流体力4),係留索に作用する張力5)などについて理論 的にまたは実験的に検証されてきた。 本研究では,高知県足摺岬沖にすでに設置されている 船型の形状をした浮魚礁(形状の詳細は後述)の運動に ついて解析を進めた。この船型の浮魚礁が開発されたコ ンセプトとして,従来の円形の浮魚礁と同等の浮力を有 した上で,浮魚礁が正面から流れを受けた時に,流れに 対する投影面積を小さくして流水抵抗を減少させて係留 索への負荷を軽減することが考えられている。しかしな がら,現場海域に浮魚礁を導入した後に,この周辺で曳 縄漁業を行う漁業者から,浮魚礁が潮流の影響を受けて 振れ回るような動きをするために,浮魚礁の近くで操業 をしようとすると,漁船と衝突する危険があるとの問題 が指摘された。浮魚礁は 1 本のロープで係留されている ために,流れや波浪の影響を受けやすく,設置している
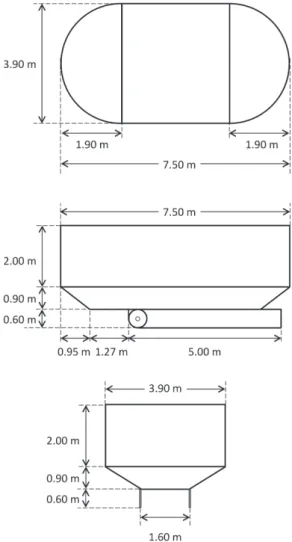
1650mであり,潮流によって浮魚礁が流されて,浮魚礁 と錨をつなぐ係留索が一直線上に張った時に海底とのな す角が37.5°になるように係留索の長さを2710mにして いる。係留索の上部には長さ 5 mの 2 本のチェーンが使 用され,浮魚礁の底面のキールに接続される。その下側 には長さ45mのチェーン,長さ2460mのポリプロピレン 系およびポリエステル系合成樹脂のロープが順に接続さ れ,海底に固定する錨と接続される最下部には長さ200 mのチェーンが用いられている。このように,係留索は チェーンとロープで構成されているが,本研究では浮魚 礁が潮流で流されて,係留索が一直線上に張った状態に ついてのみを考え,係留索の直径や比重の違いについて は考慮しなかった。流水中での浮魚礁の運動において, 浮体に作用する流水抵抗として,浮体の運動に対する粘 性抵抗および造波抵抗が挙げられる。粘性抵抗および造 波抵抗は海水の慣性,粘性および重力によって支配され るが,ここでは粘性による影響は小さいものとして慣性 力と重力の比で表されるフルード則に従って,模型実験 を行うことにした6)。すなわち,実物に対して30分の 1 の大きさの模型(全長25.0cm,最大幅13.0cm,高さ 11.7cm)を用いて,⑴式,⑵式にそれぞれ示す縮尺比, 速度比に基いて実験を行った。 縮尺比 m=301 ……⑴ 速度比 . V V 0 183 f m m = = ……⑵ ここで,Vm,Vfはそれぞれ模型実験での流速,実海 域における流速を示す。 実験はFig. 2に示すように鹿児島大学水産学部の回流 水槽(観測水路:長さ6.0m,幅2.0m,水深1.0m)で 行った。 前述したように本研究では,係留索が一直線上に張っ た状態についてのみ検討するために,実験では実物の設 海域の流速が大きくなると,浮魚礁自体が大きく移動す ることが言われている2)。 そこで本研究では,船型の浮魚礁に対して簡易的な改 良によって大きなコストをかけないで振れ回り運動を抑 制させることについて検討した。はじめに浮魚礁の模型 を用いた回流水槽実験によって現状の状態での振れ回り 運動を調べ,次に浮魚礁の船尾部分に安定板を取り付け て振れ回り運動を減少させる効果を検証した。 2.材料と方法 研究対象とした浮魚礁の上面図,側面図,正面図を Fig. 1に示す。浮魚礁のサイズは全長7.50m,幅3.90m, 高さ3.50mであり,底部には 2 枚のキールが浮体の底面 に対して垂直に取り付けられており,キールの船首部分 側には係留索を取り付けるための孔が開けられている。 浮魚礁が設置されている高知県足摺岬沖の海域の水深は
Fig. 1 Specifications of the drifting fish aggregating device. Upper: top view, middle: side view, bottom: front view.
Fig. 2 Schematic illustration of experimental set-up in a flume tank. Gray means the board installed.
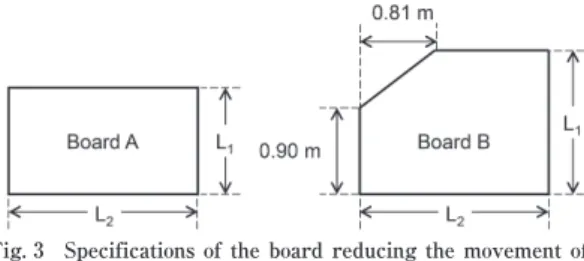
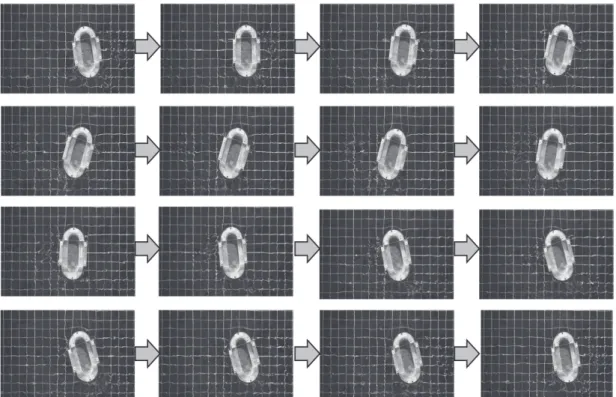
計と同様に係留索と水槽底面とのなす角が37.5°になる ように,係留索の長さを1.64mにした。実験時の流速は, 実海域の潮流の速さ1.0〜3.0ノットに相当する9.4〜 28.8cm/sで 5 段階に変化させた。流水中における浮魚 礁模型の運動を回流水槽の上方に設置したデジタルビデ オカメラで撮影し,記録した動画を 1 /30秒ごとの静止 画像に変換して分析した。浮魚礁は流水中で流れ方向に 対して横方向に振れ回る運動をしたため,画像分析では 浮魚礁の船尾部分の運動軌跡を求め,10周期分の運動に ついて振れ幅と周期を測定して平均値を求め代表値とし た。次に,浮魚礁の振れ回り運動を抑制するために,船 尾側のキール部分に安定板を取り付けて,その効果を検 証した。Fig. 3に示すような矩形の安定板Aと安定板の 上端が船尾部分に接するように切れ込みを入れた安定板 Bの 2 種類を用いた。実物サイズでの安定板の主要目は Table 1に示す通りで,安定板AおよびBではL1の長さ をそれぞれ1.11m,1.50mとして,安定板を浮魚礁に取 り付けた時に安定板の後端と浮魚礁の船尾後端が同じ位 置になるようにしたのがL2が1.14mのA-1,B-1 である。 A-1,B-1に対してL2を1.2倍ずつ長くしたのがそれぞ れA-2(B-2),A-3(B-3),A-4(B-4)である。その結 果,L1/L2は0.56〜1.32,面積Sは1.27〜2.73m2となっ た。ここで,浮魚礁に安定板を取り付けた時に浮魚礁を 側面から見た時の投影面積が実際に増加する面積,すな わち安定板の面積Sから取り付けた時にキールと重なる 部分を除いた面積を実面積 S’ とすると,S’ は0.73〜 2.19m2となった。 3.結 果 回流水槽実験で流水中での浮魚礁の運動を観察した結 果,流れに対して横方向に振れ回る運動を繰り返した。 浮魚礁に安定板を取り付けない現状の模型で実験流速を 18.8cm/s(実物換算で流速2.0ノットに相当)とした時 に撮影した動画を30分の 1 秒間隔で静止画像に変換して 示したのがFig. 4である。この図では写真の上側が流れ の上流で,浮魚礁の上側が船首,下側が船尾である。浮 魚礁は流れ方向に対する船首方向の角度,すなわちヨー 角を連続的に変化させながら,流れに対して横方向に振 れ回る周期的な運動を繰り返していることが分かる。浮 魚礁は,運動の方向を反転させるときに係留索を支点と して船尾部分を大きく回転させていることから,振れ回 り運動の振れ幅は,船首部分よりも船尾部分の方が大き くなっている。 回流水槽実験の結果から求めた浮魚礁の船尾部分の振 れ幅および運動周期と流速の関係を実物の値に換算して, それぞれFig. 5,Fig. 6に示す。Fig. 5から,安定板を取 り付けない現状の浮魚礁では,船尾部分の振れ幅は流速 が1.0ノットで6.9mで,流速が増加するにつれて振れ幅 は減少し,流速が3.0ノットでは4.5mであると推定され た。一方,安定板を取り付けた浮魚礁でも同様に,流速 が増加するにつれて船尾部分の振れ幅が減少する傾向が 見られた。安定板Aでは実面積 S’ が最も小さいA-1で 振れ幅が最も大きくなり,流速が1.0ノットでは振れ幅が 2.4mで,流速が2.0ノット以上では振れ幅はほぼ一定で, 流速が2.0〜2.5ノットでは0.8m,3.0ノットでは0.6mで あった。安定板Bでも実面積 S’ が最も小さいB-1で振れ 幅が最も大きくなり,流速が1.0ノットで振れ幅が2.4m で,流速が1.5ノットで1.0mに減少し,流速が2.0〜3.0 ノットでは0.5mから0.8mでほぼ一定であった。 浮魚礁の振れ回り運動の周期は,Fig. 6に示すように 流速が大きくなるにつれて減少する傾向が見られ,安定
Fig. 3 Specifications of the board reducing the movement of the drifting fish aggregating device.
Table 1 Specifications of a board reducing the movement of a drifting fish aggregating device. L1 (m) L2 (m) L1/L2 S (m2) S’ (m2) A-1 1.11 1.14 0.97 1.27 0.73 A-2 1.11 1.38 0.80 1.53 0.99 A-3 1.11 1.68 0.66 1.86 1.32 A-4 1.11 1.98 0.56 2.20 1.66 B-1 1.50 1.14 1.32 1.47 0.93 B-2 1.50 1.38 1.09 1.83 1.29 B-3 1.50 1.68 0.89 2.28 1.74 B-4 1.50 1.98 0.76 2.73 2.19
板を取り付けない現状の浮魚礁の場合で,流速が1.0ノ ットでは1.1分であったが3.0ノットでは0.4分に減少し た。安定板Aを取り付けた場合では,振れ回り運動の周 期は現状の浮魚礁とほぼ同じであった。一方,安定板 B-2,B-3,B-4では流速が1.0〜1.5ノットの時に現状 の浮魚礁と比べて大きく増加し,流速が1.0ノットでは 周期がそれぞれ2.3分,2.6分,2.4分となり,現状の浮 魚礁の周期1.1分と比べて 2 倍以上大きくなった。 次に,浮魚礁に取り付けた安定板のサイズと振れ回り 運動の振れ幅の関係を整理するために,浮魚礁を側面か ら見た時の実面積 S ’ について現状の浮魚礁に対する安 定板を取り付けた時の割合を求め,また,流速が2.0ノ
Fig. 4 The movement of prototype of the drifting fish aggregating device without the board at flow speed of 18.8 m/s.
Fig. 5 Relationship between flow speed and amplitude of
movement of the drifting fish aggregating device. Fig. 6 Relationship between flow speed and period of movement of the drifting fish aggregating device.
Fig. 7 Relationship between ratio of lateral area for prototype and ratio of amplitude of movement for prototype.
ットの時の現状の浮魚礁の振れ幅に対する安定板を取り 付けた時の振れ幅の割合を求め,両者の関係をFig. 7に 示した。この図から浮魚礁の船尾部分に安定板を取り付 けることによって,振れ回り運動の振れ幅は現状の浮魚 礁に対して0.11以下に減少し,安定板の面積が大きくな るにつれて漸減することが分かる。このように浮魚礁に 安定板を取り付けることによって,流水中における振れ 回り運動の振れ幅を抑制する効果が得られることが考え られた。 4.考 察 本研究では,高知県足摺岬沖に設置されている浮魚礁 を対象として,模型実験によって流水中における振れ回 り運動について,振れ幅と周期を明らかにした上で,浮 魚礁の船尾部分に安定板を取り付けて振れ回り運動を抑 制する効果について検証した。浮魚礁を現場海域に導入 した後に,その周辺海域で曳縄漁業を行う漁業者の間で, 浮魚礁の振れまわり運動が操業を行う上で障害となり問 題視された場合に,その対応策としてなるべく簡易的な 修理によって大きなコストをかけない方法として,船尾 部分に安定板を取り付けることを考えた。 模型実験の結果,現状の浮魚礁の振れ回り運動は流速 が増加するにつれて振れ幅が減少し,運動周期が短くな ることが明らかになった。すなわち,現場海域において 潮流の速度が遅い場合には,浮魚礁自体が緩やかに運動 をしながら幅広く振れ回るのに対して,潮流の速度が上 昇すると振れ幅は小さくなるが,浮魚礁自体の運動は速 くなることが明らかになった。 浮魚礁の船尾部分に取り付ける安定板の形状について AとBの 2 種類を検討した。安定板Aでは浮魚礁底面の キールと船尾部分の隙間が空いたままであり,この隙間 をなくすように浮魚礁の底部に接するようにしたのが安 定板Bである。安定板AおよびBの何れの場合でも浮魚 礁の振れ回り運動の振れ幅は抑制されたが,流速が1.0 ノットから1.5ノットでの運動周期は,安定板Bでは安 定板Aよりも増加する傾向が見られた。すなわち,流速 が1.0ノットから1.5ノットの時も考慮すると,安定板B の方が浮魚礁の振れ回り運動の速度が遅くなるために, 浮魚礁の近くで操業する漁船の安全性を考えると安定板 Bの方が有効であると考えられる。 流水中における浮魚礁の運動は,海底に固定される錨 を支点とする運動と,係留索と浮魚礁との接続点を支点 とする浮体の回転運動の 2 つの運動が合成された運動で ある。流水中における浮魚礁の振れ回り運動は,曳航さ れる船や生簀の運動7),8),係留中の船の運動9)-11),曳縄 漁業で使用される潜航板の水中での運動12),13)と類似し ており,流水中で 1 本の係留索でつながれた物体に生じ る特有の運動であると考えられる。 浮魚礁周辺で曳縄漁業の操業を行う漁業者らの間では, 浮魚礁が振れ回ることによって衝突の危険があると言わ れているが,浮魚礁の周辺で操業する曳縄漁船にとって は,係留索の錨を支点とする運動よりも,浮魚礁自体の 運動の中で特に振れ回り運動の方向が変化するときに船 尾部分が大きく回転することが衝突の危険を生じさせる 最も大きな要因であると考えられる。 本実験の結果,浮魚礁の船尾部分に安定板を取り付け ることで,振れ回り運動が大幅に抑制され,現在,この 結果をもとに実海域において安定板が取り付けられた浮 魚礁が導入されている(Fig. 8)。浮魚礁に安定板を取 り付けることによって振れ回り運動が小さくなり,浮魚 礁周辺で曳縄漁業を行う漁船にとって衝突の危険性が小 さくなり,安全性が向上することが考えられる。 本研究では浮漁礁の振れ回り運動を抑制することを目 的として,安定板による効果を検討したが,この振れ回 り運動が抑制されることで,これまでと比較して,浮魚 礁周辺の流動環境も変化することが予想される。浮漁礁 に魚類が蝟集する要因のひとつに,浮魚礁によって生じ た流れの変化が考えられており,これを魚類が側線によ って感じ取っているとされ,また,浮魚礁や係留索によ る陰影効果,音響振動効果,付着生物などによる物理的, 化学的な刺激なども蝟集効果の要因として考えられてい る2),14)-17)。高知県沖での観測によると浮魚礁は恒流成 分が卓越した流れによって一方向に流されていることや, 浮魚礁の下流側に発生する後流域の規模は数百メートル まで影響すること,その一方で,多くの浮魚礁では潮上 側に魚類が蝟集して漁場が形成されることが報告されて いる2)。これらのことを考慮すると,浮魚礁周辺の流動 環境の変化は,魚類の蝟集効果に影響を及ぼすことが予 想されることから,浮魚礁に安定板を取り付けたことが 漁獲量に与える影響については,今後,検討していくこ
Fig. 8 Drifting fish aggregating device installed the board reducing the movement.
とが必要である。また,浮魚礁の振れ回り運動が抑制さ れたことによって,係留索に作用する張力がこれまでと 比較して変化することも考えられ,浮魚礁を海上に安全 に係留するためには,張力の大きさや成分がどのように 変化するかについても検討することが必要である。 本研究では浮魚礁の振れ回り運動について流速による 影響についてのみ考察をしたが,浮魚礁の振れ回り運動 は流れの状況だけでなく波の周期や波長5),風向,風速 の影響も受ける。また,係留索の長さによっても浮漁礁 の振れ回り運動が変化すると考えられる。今後は,これ らについても考慮して,操業時の安全性を確保した上で, 効果的な浮魚礁の開発につなげていく必要がある。 参 考 文 献 1) 竹内俊郎・中田英昭・和田時夫・上田 宏・有元 貴文・渡部終五・中前 明:改定水産海洋ハンド ブック,生物研究社,東京,pp. 275-276,2011. 2) 大竹臣哉:浮魚礁の水理機構と生物生産,水産工 学,50(1):33-38,2013. 3) 松原雄平・野田英明:浮魚礁に関する研究,海岸 工学講演会論文集,28:436-440,1981. 4) 井上 悟・滝川国盤・藤本学・永松公明:連続球 型浮魚礁の抵抗特性に関する基礎的研究,水産工 学,49(1):21-25,2012. 5) 宗景志浩・小原 昭:中層浮体(浮漁礁)の係留 ロープの張力に関する研究,高知大学学術研究報 告,28:117-123,1980. 6) 江守一郎・斉藤孝三・関本孝三:模型実験の理論 と応用(第三版),技法堂出版,東京.pp. 124-128, 2000. 7) 重廣律男:曳航船・被曳航船系の操縦運動モデル, 関西造船協会誌,230:153-164,1998. 8) 重廣律男・上田耕平・有井俊彦:高速曳航いけす の 針 路 安 定 性, 関 西 造 船 協 会 誌,227:79-87, 1997. 9) 橋本 進・市原義三:単錨泊中の振れ回りについ て,日本航海学会誌,11:83-95,1954. 10) 藤井照久・橋本 進・大本直宏・松原昭一・岡辺 光邦・古荘雅生・新井康夫:錨泊中の実船の振れ 回り軌跡について,日本航海学会論文集,62:145-151,1980. 11) 貴島勝郎・孝岡祐吉:単錨泊船の船体振れ回り運 動の軽減に関する一考察,日本造船学会論文集, 164:213-220,1988. 12) 江幡恵吾・藤田伸二・不破 茂・松村一弘:道糸 張力から推定した潜航板の運動軌跡,水産工学, 38(3):239-245,2002. 13) 江幡恵吾・原 正和・村田政隆・松村一弘・不破 茂・平石智徳・山本勝太郎,データロガーを用い た運動中の潜航板の姿勢測定,水産工学,44(2): 85-90,2007. 14) 山中有一・R. Babaran:浮魚礁への魚の蝟集機構, 水産工学,50(1):39-42,2013.
15) R. Babaran, C. Endo, Y. Mitsunaga and K. Anraku: Telemetry study on juvenile yellowfin tuna Thunnus albacares around a payao in the Philippines, Fisheries Engineering, 46(1):21-28, 2009.
16) C. Girard, S. Benhamou and L. Dagorn: FAD: Fish aggregating device or fish attracting device? A new analysis of yellowfin tuna movements around floating objects, Animal Behaviour, 67: 319-326, 2004.
17) T. Matsumoto, K. Satoh, M. Toyonag: Behavior of skipjack tuna (Katsuwonus pelamis) associated with a drifting FAD monitored with ultrasonic transmitters in the equatorial central Pacific Ocean, Fisheries Research, 157:78-85, 2014.