NII-Electronic Library Service
Human
Factors
in
Design
Validation
of
lnteractive
Devices
E=h
rti-rn=-Monica BORDEGONI
$i1IrvV<#
PolitecnicodiMilano
The
paper
describespractices
forvalidating engonomics as-pect$ofinteractivedevicesusing thestate-of-the-art of virtualprototyping
methodologies and technologies.The approachwe propose
ls
quite
innovativeand isbased on mixedvirtual-real
paradigm,
where a virtual reaMy application idaugmented withdynamichaptjcsystems consistjng of ad hocdevicesthat can be programmed and configured forsimulating the behav-iorofspecificobjects.Fig,1.Productdesignand manufacturing phases
1.
IntroductionThe productdesignphase issubject to several recycles where designchoices are reviewed several times on the ba-sis of testingresults. When confidence
in
productdesignisreached, designisreleased
for
manufacturing(Figure
1).
Mistakesinthedesignphasehavethemost impact,and the amount of subsequent rework
downstream
is
stilisubstantial.Itiswell known thatthe more designchanges occur closer
tothemanufacturing phase,themore the
impact
on productdevelopmentcosts increases,lnorder toreduce mistakes and
designchanges, practicesperformingde$igntestingand
vali-dationefficientlyand effectively
-starting
since the earlycon-ceptual designphase-havedeveloped.
A common and traditional
practice
makes use ofphysicalprototypesfor
performing
validation tests,Actually,thedesignphase
issupported byCAS and CAD too]sthatproduceand releasedigitaldescriptionsofproducts.
Therefore,mathemati-calmodels areimmediatelyavailable forsubsequent re-use. In therecent
years,
several tooissupporting virtual validation andsimulation of
products
havebeendeveloped.Thespreading ofthese toolshasbeen also supported byincreasinglypowerful hardwareenabling theexecution ofcomplex simulations. The practicebasedonsimulation isnamed "virtual
prototyping"'.
Compared tophysicalprototypingpractice,virtual
proto-types are ingenerallessexpensive, allowfornot one but $ev-eral simulation runs on asinglemodel, areeasilyconfigurable and support variants.
Furthermore,
testsare repeatable, and results of validation are often immediately availableforproduct
Fig,2.Validatienpractices:physicaland digitalprototyping
design
review. We can say thatvirtual prototypesofien provide insightsthatphysical
testingwould not reveal,Anyway, if digi-talprototypingdoes not completely substitutephysicaltests,they helpoptimising and eliminatingredundancy intest
facili-ties,accelerating
life
testing,etc,
Currently,
companies tendtoreduce theuse and numbersof physica[prototypes,opting forusing them atthevery end of
the
design
phases,and extensively usingdigital
prototypingearly inproductdesign
(Figure
2),Thepaper
describes
±he
kinds
ofproducttestingand valida-tionpracticesthatcan beperformedusing currentlyavailableand emerging technologies.
2.
Product DesignValidation
two kindsof validation areusuallyperformed
in
theproduct design:1
,
Engineeringfunctionalaspects validation; 2.Ergonomicsissuesvalidation.Thefirstkindofvalidation aims at testingproduct
behaviour
and engineering aspects, likeaerodynamics, crash, stress,
de-T-ifif>\ffXkkg speclalissueofjapanesesocietyforthescienceofdesign vol.15-4 ne.60 200B NII-Electronic Mbra
25
yformatjon,noise, vibration, etc. foday,these testscan
be
done
on thevirtualprototypeusing analysis and simulation tools(for
example, tools likeANSYS, LMS, etc.).These±oolsallowbuildingsortsofvirtualIabteststhatareoftencomparable to
physical
hardwareones,Forwhat concerns thevalidationof ergonomics issues,the ISO
9242
ergonomics standard pointsout threeaspects toconsider:
. Effectiveness:ifand how atask
(objective)
isachieved ;. Efficjency: effortrequired forachieving a
pre-defined
levelof effectiveness ;
. Satisfaction: degreeofcomfort perceivedbytheusen Ergonomicscan bedescribedas theapplication of scien-tificinformationconcerning humans tothedesignof objects, systems and environment forhuman use
(Ergonomics,
2001).Some
type$ofergonomic validation are run usjng virtual pro-totypes:typically,safety tests.The validation of other ergo-nomics aspects ofproducts,likecomfort, usability,efficiency,effectiveness, etc. are subject to personalfeelingsand tastes
of users, related to theirpreferences,emotions, skill,cultural
and socialaspects, etc.
Computer
representations cannot fullyaddress every ergonomic issueoftheproduct;therefore
physi-cal prototypesmay stjllprovenecessary.
Inthefollowing,we analyse thepossibilityof using reallvir-tuaiusers forrunning ergonomics testsof realfvirtual products
(Figure
3).ReaiusetiReatproduct: Usersperformtraditionaltestsusing
physical
prototypes.
Wrtuatusetiurrtual product:Virtualhumans are used for test-ingfew aspects of
products,
throughthesimulation of digitalmodels, Some toolslikeEDS-Jack, Catia,etc,support the definitionof computational models of humans, the computa-tionofart
positioning,
and thereforetheprediction
of postures and comfort. Theleftsnapshot of Figure4shows avirtualhu-man drivingacan ltis
possible
testinguser comfort by mea-suringvjrtuaihuman postureparametersIike
bending
degree
oflimbs,forcesexerted on theseat,etc,The snapshot on the right-hand side of
Figure
4
shows a stepof thesimulation ofthe
field
of view ofa virtualcardriver
when turning Ieft.Thisstudy isparticularlyusefulfortestingthelevelof occlusion of acar doorpost
(Cu]ubert
Montanera,2002).Whileseveralaspects can betested
in
avirtualenvironment, conversely, therearenotmodels thatcanbe
usedfor
predict-ingmanipulation forcesapplied byusers.26T-vrf
),\ensksug speclalissueefjapanesesecietyforthescieficeefdesign vol.15-4 ne.60 200S PRODUCT o=t's e ¢ L /111';11/1'11ill/1/'/1'u.sets-pe.1mporm
testsusingvttu.al Eptl,'toty'plg,g・bf'.・il・' praduct&・eR"tfotimeht///tt//t////..t/////t/../
/・・・・t//./・///t,・/1 Simulatienef virtuathuman lnvirtuaienvironment Vsersperform traditionaltests usmgphysical protetypesr
real vlrtual USER
Fig.3.Relationbetween user and productconcerning theproduct
vaiidation pha$e
Fig.4.Snapshot ofthesimulation ofavirtualhuman drivingavirtual
cac and itsfieldofview when turningleft
ReaiusertWrtuat product:users pertormtestsusing virtual prototypingof productand environment. This jssue is
NII-Electronic Library Service
3.
Virtual
Prototyping
The
validationofergonomics aspects ofaproductincludes
thevalidation ofits"look
and feel".Boththeseaspects require theinvolvement
otrealuser$in
thevalidationprocess.User$
interactwiththerepresentation
-real
orvirtual-ofproducts
inorder totest
its
"look"(attractiveness,
colour, textures,etc.) and"feel''
{behaviour,
textures,etc.).Whilethefirstinvolvesonly aspects relatedtovision,thelatterinvolvesaspects
re-lated
tophysical
contact with objects. Thisistypicalof several products,especially consumerproducts
(like
control devicesof cardashboardsand airplane cockpits, washing machines,
ovens, musiclvideo
players,
etc,),butalso industrialproducts
(like
controldevicesof machine tools).The use of
physical
prototypesinergonomics validation hasallthedisadvantagesand limitationspreviouslydescribed.In
particular,
variantsand configurations cannotbe
quicklyset upand tested.Therefore,itseems interestingstudying the inter-action of real humans and virtualproducts.
Inorder tounderstand which are the capabilities and ef-fectivenessof ergonomics validatlon performedusing vlrtual prototyping,itisnecessary to have a view of the
state-of-the-artof technologies enabling virtual prototyping,
Systems
where users interactwith virtual environments make use of VirtualRealitytechniques and technologies{Earnshaw,
1
995).
Mainly,Virtual
Reality
state-of-the-artconsists ofvisualization techniques :Head Mounted Display-
HMD
CVirtual
Research Systems),largescreens, workbench{Kruger,
1994),CAVE
(Cruz-Neira,
1993),and others, thatgiveusers theimpression of beingimmersed intothevlrtual world, Besides,more real-ismisprovided
bystereo-viewing technology,AIImentioned technologiesallow theperceptionof visual aspects(look}
ofproducts.
On
theother hand,thosetasksinvolvinginteractionof userswithsystems requiremore appropriate media and modalities.
Some technologieshaveappeared recently and support
in-novative ways ofinteraction:whole handdevices
CVirtual
fech-nologies),3D devices
{Logitech),
etc.The major [imttationofthese
devices
concerning taskslikevalidating interactivede-vices
(ergonomics
testing)isthefac±thattheydo notprovide
information
about thesense oftouch.Some new devicesappeared inthelast
years
on themarket, namedhaptic
devices.
The
term ['haptic"is
used toindiGate
both
tactileandkinestetics
aspects ofthesense oftouch(Bor-degoni,
2002).Some
devicescan beworn on a finger,likeFig.5.A user interactingwith avirtual pieceotcable using two
foM devices.The twospheres en thevisual scene correspond totheuser'$ fingersintherealworld moving thehapticdevices
thePHANfoM devices
(SensAble
lechnologies);some othersareexoskeleton ref[ecting forceon theuser's hand,likethe SarcosDextrousArm Master;thereare actuated gloves,like
the
Vlrtual
fechnologies
Cybergrasp
CVirtual
fechnologies),
andbi-directionalactive deviceswith threedegreeoffreedom,like theHapticMaster
(FCS-CS),
and $everal others. Whiiethesedevicesare genera[-purpose,thereare other devicesthatare
oriented tospecific applications, especially forthe medical field,such asforlaparoscopy,endoscopy, etc,
(MMVR
2003). Another interestingtypeofdevicei$
the so-called"matrix
dispiay"
thatsupportsboth
thevisualandhaptic
simulation ofobjects on auniquedevice
(lwata,
200]).Object
charac-teristicsaresimulated throughhapticmodels, and perceived throughvision and thesense of touchbyusers wearinglusing hapticdevices.
State-of-the-artof general-purposehapticdevicessupports
the simulation of activities like"inspect
an object", "push a button",Figure5 shows a user wearing a PHANfoM device, inspectingavirtualcable.
Othermore complex tasks,like"turn a knob"aredifficul±, if not impossible,toperformwith thesedevices,Thisismain[y
due tothecurrent developmentstage of commercia[ devices thatdo not allow thesimulation of complex situationslike6 d,o.f.operations, operations requiring torquecomputation, rendering othighforces,and so on.
Alternativeapproaches
for
thosekindsofvalidationconsist of configurable hardwareprototypes.
Most of theexampleshave
been
realisedin
theautomotive sector.Some
research centers of automotive companies usephysical
prototypes
thatallow fortheconfiguration of several typesofvehicles, fvrfy#asskmg specialissueotjapanesesecietyferthesc]enceetdeslgn vel.15-4 ne.60 2008 NII-Electronic Mbra
27
ybymodifying $ome parameters,likeposition,orientation, etc.,
ofsome
physical
parts(Caputo,
2001){Di
Girolamo,
2001).
Programmable VehicleModel
(PVM)
of Prefix{Prefix}
isan example of configurable vehicle.These
solutions are usuallyvery expensive and require longre-configuration time,and are
mainly developedforaunique producttype.
An alternative approach to theuse of
haptic
devicesandconfigurable hardwareprototypesconsists of dynamichaptic systems whose behaviorcan
be
programmed.4.
Dynamic
Haptic
Systems
Dynamic
haptic
systems consist of ad hocdevicesthatcanbe
programmed and configuredfor
simulating thebehaviorofspecificobjects.
For
demonstrating
theconcept, we havedesignedand builtsome hapticsystems thatcan be dynamicaHy
programmed
forthevalidationofergonomics and usability designaspects. Figure
6
shows theCAD model of a dynamic knob prototype(Gandolfi,
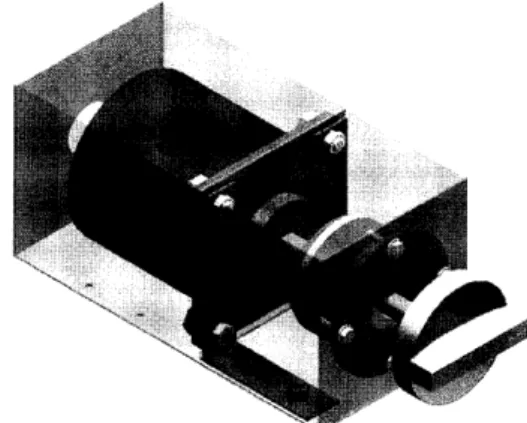
2002), Figure7 shows thedeveloped physical prototypeof theknob.Itconsists of a mechanical system, acontrollerconnected toa computer running a programfor set-tingtheknobparametersjnreal-time. The user interfaceof the configurationprogramisshown inFigure8.
The
knob
prototypecan be mounted and positionedinanenvironment. Forexample, itcan be mounted on a car dash-boardor on awhite
goods
panel
board,Userscan beasked to tryand use theknob.Iftheydo not likeitsresponse and behavior,and want tomodify it,theknob parameterscanbe
changedin
real-time.When thepreferred
configuration is reached, correspondingparameters
and datacan bestoredby
the
control systemfor
subsequent usein
design
reviewphases.
These
hardware
prototypessimulate productsbehaviour,
butusually do not implementaspects concerning the`[look" of a product,
Usually,
they areuglymechanical systems,simulat-ingthebehaviourof a device,
but
not theappearance ofboththe deviceand thewhole environment. For example, theknob developedand shown in
Figure
7
canbe
used tosimulate aknob mounted on acar dashboard.Inorder to provideusers
a view of how thewhole environment will
be
once thecaris
bujlt,knob visual aspects are not satisfactory as they are im-plementedinthehardwareprototype:thevisual appearance of
theknobdoes not lookreal and cannot bechanged; besides thattheusers do not see the environment where the knob
28T-wy\assNzae
speclalissueofjapanesesocietytorthesciemceefdesign vol.15-4 ne.60 200SFig.6.CADmodel ofadynamic knob prototype
Fig.7.Knob dynamichardwareprotetype
m -"Z
.dwN
OneHblvop
Ne'b'Utt'op'e'li'mp.Q'ipttu roalavadi.
LptW{11 Etts.exfi. Tpku
"..
{uaan.,:L":al'k'op
'
irr
IS-- rtop'pa=rmrmj
as" V inpae-/nyak=wi FMun Fig.8. tu Setvtny"tsuua IVtsmoaw in,t
dmo e3!, 1 ltteec em' IS ee400,ts/ta
i3 /,/SeeO 2S/M :d e::・tee ]Jbscii
ll:?・
!k,'i#1
Ii;
uS'`i.es,
.mam
i'sc.
osw1: lllUO Osw Et 11smo npms tfi :7・pm Orm
gl:---un-,-iL::-.ur.-..-r::J
.
"
Userinterfaceoftheprogramforsettingtheknobparameters
shou[d
be
mounted on(the
car dashboardinour example).On
theother hand,ifweprovide
thevisualrepresentation ofthecar
dashboards
only,theuserwillnot beable tovalidatethe ergonomics aspects ofdevices mounted on the
dash-board,
like
theknob.
A so]ution forovercoming this
problem
ismixing realandNII-Electronic Library Service
5.
Mixed Real-VirtualPrototypingWhen only real or only virtual informationisavailabie ina
system, itmight not be enough byitselfso as users can fully interactwith thesystem and accomplish some giventasks,ln some cases, itmight beuseful conceiving systems thatmix virtual and real information.
Thesesystems are made oftwo parts
(Figure
9):. one partconsists ofrea[ environment and objects;
. theother partconsists otvirtual representation of both envi-ronment and objects,
An
application canimplement
thehuman-computer
interac-tionas a mix ofvirtual and real modalities, where virtual and
real
information
is
presentatvariablepercentage,lf
theinfor-mation
fully
comes fromtherealworld we talkabout Reality;if
theinformation
fully
comesfrom
thevirtualworld we talkabout
Virtuality.
If
both
themodalities arepresentin
the appli-cation,we talkabout MixedReal-Virtualinteractionmodality,From a practicalpointof view, mixed real-virtual interaction
can beimplementedadding informationtothealready existing
one.
Ifa system is
primarily
basedon realinformation,thequan-tityof informationthatcan be made ava[lable foruse can be improvedadding virtual informationtoit.These systems are
called Augmented Realitysystems
{Figure
1O).
Thequantity
ofinformationavailableintheaugmented interactioninterface isincreasedof avalue thatdepends on thequantityof virtual informationthatisadded.
Conversely,ifan applicationismainly based on virtual rep-resentation of environment and objects, realobjects can
be
added tothem.Inthiscase, we talkabout Augmented Vir-tualitysystems(Figure
1
1).
Also
in
thiscase, thequantityofinformationavailableintheaugmented interactioninterface
is
increased
ofava[ue thatdepends
on thequantityofrealinfor-mation thatisadded.
The type ofinteraction interfacethat isimplemented ina
system depends on several parameters,such as the
applica-tionrequirements, the kindsoftechnology used and its limita-tions,thetypeof
data
andinformation
initially
available,etc.An application might implement various types of interac-tionmodalities thatareavailablesimultaneousiy, and can be
changed continuously
{Milgram,
1994>.Duringtheinteraction with a mixed real-virtual application environment, users can vary continuously thetype
of interaction,adopting the interac-tionmodality thatismore suitable and convenient, giventheFig.9.Mixingreaeand virtualintormation,according todifferent modalityshare
Fig.10.Augmented Realitysystems
itk'=tibl-8g-Em=c
Higlt Lrw i'Yiijtilai・
Quantltytf inionrnatlon Fig.11.AugmentedVirtualitysystemscontext and thetasktoperform
{Figure
]2>,Based on thisreasoning, theergonomics application using the
dynamic
hapticsystem we havedevelopedisoftype Aug-mented Virtuality.Infact,a realisticvisual representation of the environment and theinteractiondevicesisusually available,since itcomes fromthedesignphase
{CAD
models), We have added informationabout thosecharacteristics oftheknobthat cannot be perceivedthroughthevirtual informationonly,by integratinga real physicaldeviceintothesystem. The virtual7'iftyvaneeksce speeialissueotjapanesesocletyferthescieneeofdesign vol.15-4 no.60 20e8
NII-ElectronicMbra
29
Hg,12, Continuous variation of typeof interactioninamixed virtualapplication
information
(digital
model of car dashboardand knob)isaug-mented withrealinformation
(physical
dynamic systems)yield-ing
anAugmented
Virtualitysystem.6.
Conclusions
This
paper
haspresentedtheresults of a research work we havecarriedouton thetopicof ergonomics validation of inteFactivedevices,The approach we haveexperimented using
vir-tualrealityscenarios augmented with dynamichaptic
devices
has proventobeeffective forpreliminaryevaluation of ergo-nomics aspects, mainly concerning effectiveness, efficiencyand usability inusing interactivedevices.More experiments are
going
tobeset up,forimprovingthemethod andpropos-ingitforother application areas,
besides
theautomotive one.Acknowledgments
Theauthors would liketothankFrancoDeAngelisand
Gior-gio
Colombo oftheKAEMaRT Group-
DipartimentodiMec-canica
-
PolitecnicodiMHano who have contributed to this work,Engonomics.
(2001).
InternationalEncyelopaediaoficsand Human Factors,Vol,
1,
faylor
andFrancis,
don.
Earnshaw R.A.,GiganteM.A.,
Jones
H.J.,(1
995).
VirtualitySystems,Academic
Press.
FCS-CS, HapticMaster,
URL
: botics2.htmGandolfiE
(2002).
Studio
e sviluppodi
dispositivi
haptic pervalidazioni inambienti virtualifinalizzati
allosvjluppoprodotto,Laurea
Thesis,
Universita'diParma--
Facolta'dilngegneria,
2002.
IwataH.,YtinoH.,
Nakaizumi
E,Kawamura R.,(2001).
ProjectFEELEX
:AddingHapticSurfacetoGraphics'',ingsof SIGGRAPH 2001 ,LosAngeles,CA.
KrugerW.,FrolichB,
(1
994).
The responsive workbench, ]EEEComputer
Graphics
andApplications.
Log]tech,
URL
:www.logitech.comMilgramR,lakemura H.,UtsumiA.,KishinoE
(1
994). mentedReality
:aclassofdisplayson therea[ity-virtuaiity continuum,(SPIE
Vol.2351,
feIemanipulatorandresence technologies,l994),
MMVR
2003,
Proceedingsof MedicineMeets VirtualRealityConference
2003, NewportBeach,CA,January2003.Prefix,URL :www.prefix.comlpvm.html
SensAble
fechno[ogies,
lnc.,URL :www.sensable.comVirtualRealityforIndustrialApplications.
{1
998).Fan Dai(Ed
.),
Springer.
Virtual
Research Systems, lnc.,URL :www.virtualresearch.comVjrtual
lechnologies,lnc.,URL :www.virtex.com
'
References
BordegoniM.,CuginiU.,
(2002).
Visual-HapticMultimodalHuman Computer Interaction,Yearbookof theAdificial
Methodological
Aspects
andCultural
lssues,Vol.I,ited
by
M.Negrotti,PeterLangEd,,2002,Caputo
E,DiGirolamo
G.,MonacelliG.,Sessa E(2001),
Thedesign
of a virtualenvironmentfor
ergonomic studies, Proc.ofXllADM lnternationalConference,Rimini,ltaly. Cruz-NeiraC.,
Sandin
D.J.,DeFantirA.(1993).
screen projection-basedvirtuaireality:The designand implementationoftheCAVE,
inComputer Graphjcs, itedby
J.T.
Kajiya.
Culubert
Montanera,
fovar
Gomis
G.,
(2002).
Use ofaVirtual Human forergonomics analysis of a carcockpit, Laurea ThesisUPC-Barcelona and Dip.Meccanica-PolitecnicodiMilano{Erasmusprogramme).
DiGirolamoG,,MonacelliG.,MartorelliM.,Vaudo
G,
(2001),
Use of VirtualMock-ups
for
Engonomics
Design,Proc.of7thlnternational