ポリシー管理ツール開発における数学的手法に基づく要求仕様の定義と実現
8
0
0
全文
(2) Domain Browser を構築する際,ツリーデー. から数万個の管理対象が存在する.管理者が. タを視覚化する必要がある.これまで多くのツ. 対象の関係を一目で把握できるべきである.. リー視覚化アルゴリズムが提案されている. 【要求 2】(焦点性). [3][5][6][7][8][9][10][11][12]. .. Domain Browser は管理者の関心がある. Domain. Browser の開発では,要求仕様からいくつか. 部分については強調して表示すべきである.. の満たすべき性質を選び出し,数学的に厳密に. 管理者が関心のあるノードを指定すること. 定義し,これらの性質を満たすことを証明でき. を「焦点を当てる」と呼ぶ.強調表示には,. る可視化アルゴリズムを選択した.. 色を変えるなど,様々な方法がある.ここで. 一般に視覚化アルゴリズムを含む GUI デザ. は,ノードに充分に広い領域を割り当てるこ. インはプロトタイプ手法で開発を進めること. とにより強調表示を行なう方法を採用する. が多い.開発者はプロトタイプシステムを構築. (図 1).. し,利用者がプロトタイプをみて GUI デザイ ンの変更を要求する. プロトタイプ手法では色などの具体的な項 目が変更要求として挙がる.しかし,その変更 要求の根拠は明示されないし,利用者もその根. 焦点を当てたノード. 拠を意識していないことが多い.そのため,プ ロトタイプ手法でのレビュー時では,具体的な 変更要求がどのような性質に基づき,なぜ行な われたが不明確になる.レビュー時に発生した 変更要求の仕様が不明確なまま作業が進捗す るので,システムをバージョンアップする際な ど要求仕様を再利用することが難しくなる. 本手法とプロトタイプ手法を組み合わせる. 図 1 強調表示. ことで,具体的かつ嗜好的な要求仕様をプロト 【要求 3】 (均質性). タイプ手法により実現し,将来のバージョンア ップで継承する必要があるような定性的要求. 焦点を当てたノードはツリー上,どのよう. 仕様を本手法で実現することができる.. 2.. な位置にあっても同様に強調されて表示す. Domain Browser とツリー視覚. べきである.つまり,ノードがツリーの中間. 化アルゴリズムに対する要求される性質. ノードであろうと末端であろうと,焦点を当. Domain Browser は分散システム管理ツー. てたら同等に充分な領域を割り当てるべき. ルとして,管理者に好ましいユーザインタフェ. である.. ースを提供する必要がある.そこで,我々は以. 【要求 4】 (連続性). 下の 5 つの要求を定めた.. 管理者がマウス等のポインティングデバ. 【要求 1】 (展望性). イスでツリーを移動させるとツリーは連続. Domain Browser はツリー全体を管理者. 的に移動すべきである. 【要求 5】 (追随性). に示すべきである.分散システムでは数百個. −2− 2.
(3) 管理者がマウス等のポインティングデバ イスでツリーを移動させると,ポインタが示 しているツリー上の点はポインタと同じ位 置を辿るべきである.. d. 以上 5 つの要求を以下の 5 つの性質として, 数学的に定義する. R を実数の集合とする.P は 2 次元平面とす る.ツリーT = (V, E) はノードの集合 V⊂P と. 図 2 展望性. 枝 e (p p, c)の集合 E の集合とする.ただし,ノ. 次に,焦点性を定義するために,「サブノー. ード p∈P が親で,c∈P が子である.T はツリ. ド」と「支配的扇形」(図 3)を定義する.. ーなので,子ノード c の親ノードは高々1 つし. 【定義 1】(サブノード) ツリーT=(V, E)において,ノード v'∈V が. か存在しない.つまり,e1 = (p p1, c), e2 = (p p 2, c). ノード v∈V のサブノードであるとは,下記. ∈ E ⇒ p 1 = p 2.. 3 つの条件のいずれかが成り立つことであ. 2 点 p1, p2 ∈P 間のユークリッド距離を|p p1, p2|と表す.. る.. ノード p1, p2 をベクトルとみなし,両者の 内積を p1・p p2 と表す. 移動関数 f : P×P → V → P は,ポインテ. •. v = v'. v'. •. (v v, v') v' ∈ E.. •. v のサブノード vm が存在し,. ィングデバイスを用いて点 p1 を p2 に動かした. (v vm, v') v' ∈ E.. とき,ノード v の動いた先の座標 f(p p1, p2)(v v) を表す関数である. 【性質 1】 (展望性). なお,ツリーは非巡回なので,ノード v'∈V v' がノード v∈V のサブノードでかつ v が v'のサ v' ブノードであることはない. 【定義 2】 (支配的扇形). 2 次元平面 P が展望性を満たすとは, 定数 d∈R が存在し,2 次元平面 P 上の任意. ツリーT=(V, E)において,ノード v∈V の. の点 p1, p2∈P が,|p p1, p2| < d を満たすこ. 支配的扇形 Sv ⊂P は,v v を扇の要とする半. とをいう.. 径無限長の扇型であり,以下の性質を満たす. ツリー T = (V, E) が展望性を満たすとは,. ものをいう.. 任意のノード v∈V が展望性を満たす平面 P. •. v'∈V が v のサブノード ⇒ Sv' ⊂ Sv. v'. 上に存在することをいう.. •. v'∈V v' が v のサブノードではない ⇒ v' ∉ Sv.. 本性質はツリーが大きさの定まった平面内 •. に表示可能であることを示す(図 2).. v'∈V v' が v のサブノードではなく,か つ,v v が v'のサブノードではない v' ⇒ Sv' ∩ Sv = φ.. −3− 3.
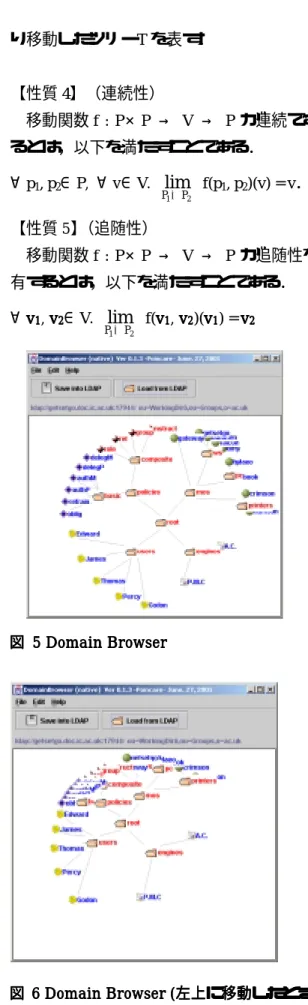
(4) り移動したツリーT を表す. v'. 【性質 4】(連続性). v. 移動関数 f : P×P → V → P が連続であ. Sv'. るとは,以下を満たすことである. ∀p1, p2∈P, ∀v∈V. lim f(p1, p2)(v) = v.. Sv. P1 → P2. 【性質 5】 (追随性) 移動関数 f : P×P → V → P が追随性を. 図 3 支配的扇形. 有するとは,以下を満たすことである. 【性質 2】 (焦点性) 距離 d∈R,角度θ∈R が与えられたとき,. ∀v v1, v2∈V. lim f(v v1, v2)(v v1) = v2 P1 → P2. ツリーT = (V, E) がノード v∈V において焦 点性を満たすとは,次の 2 つがともに成り立 つことである. •. v のサブノード v'において, v' v'≠v v', v' v ⇒ |v' v' v| ≧ d.. •. v の支配的扇形 Sv の中心角 t が t ≧ θ.. 図 5 Domain Browser. d. p. t. 図 4 焦点性 【性質 3】 (均質性) ツリーT = (V, E) が均質であるとは, ∃p p∈P, ∃d, θ∈R が与えられたとき, f(p1, p2)(v) = p ⇒ ツリー f(p1, p2)(T)は点 p において d, θで焦点性を有する.. 図 6 Domain Browser (左上に移動したとき 左上に移動したとき) (左上に移動したとき). ただし,f(p1, p2)(T) は移動関数 f(p1, p2)によ. 4 −4−.
(5) を p'に移す写像である.ただし,p' p' p'. 3. Hyperbolic Tree 視覚化アルゴリ ズムとその性質. は |p' p'p'p - c| = r2 かつ (p' p' c) と p' c||p (p p - c)は並行となる.. Hyperbolic Tree 視覚化アルゴリズム[3]と •. は非ユークリッド空間の一つである双曲平面. 直線 C による鏡像写像 TC は円板 D 内. のモデル Poincare 円板 D = {(x, y) | x2 + y2 <. の点 p を直線 C で線対称の位置に移す写像で. 1}上にツリーを配置するツリー視覚化アルゴ. ある.. リズムである.Poincare 円板 D ではその中心. 円 C が Poincare 円板 D と直行する場合,. から遠いほど双曲平面上での距離は増大する.. 鏡像写像 TC は D を D に写し,双曲平面距離. 2 点 p1, p2 間の双曲平面距離 | p1, p2 |h は次のよ. と双曲平面角度において,等距離・等角変換. うに定義される[2].. であることが知られている[2].また直線 C. | p1, p2 |h =. ∫. 1 0. |. 2 dγ (t ) | dt dt 1− | γ (t ) | 2. が円板 D の中心を通る場合も同様である.. ここで,γは点 p1, p2 を通る双曲平面線分を 表し,γ(0) = p1, γ(1) = p2 である.γ(t)が D. c. の中心から離れ,1 に近づくほど双曲平面距離. p. p'. が増大することがわかる.また,Poincare 円板 r. 上でのユークリッド角度は双曲平面角度と同 じである[2]. Hyperbolic Tree 視覚化アルゴリズムでは,各. 図 7 円 C による鏡像写像 TC. ノードの支配的扇型の中心角が等しく(本事例 では角度π),接続されたノード間の双曲平面 距離が一定になるようにノードを配置する.. 【定義 4】Hyperbolic Tree 視覚化アルゴリズ ムでの移動関数 f : P×P → V → P. Poincare 円板では与えられた直線と交わらず,. Hyperbolic Tree 視覚化アルゴリズムでの. 与えられた点を通る直線が無数に引けること. 移動関数 f : P×P → V → P は p1 を p2 に移. が知られている[2].そのため,中心角πの支. す鏡像写像 TC1 と,p2 を p2 に写し,かつ,. 配的扇型同士が重なることはない.円板 D の. 円 C2 の中心が p1 と p2 を結ぶ直線上に中心. 円周に近づくほど双曲平面距離が増大するた. が存在する円 C2 の鏡像写像 TC2 とを使って,. め,ノード間の双曲平面距離が一定のノードを. f(p p1, p2) = TC2・TC1 と定義できる.ただし,. 無限個配置することができる.. C1, C2 は Poincare 円板 D と直行する円,もし. Hyperbolic Tree 視覚化アルゴリズムでの移. くは円板 D の中心を通る直線である.「・」. 動関数 f は鏡像写像 TC を使って定義する.. は関数の合成を表す. 本移動関数は,鏡像写像 TC が等距離・等角. 【定義 3】鏡像写像 TC 鏡像写像 TC は以下のように定義される.. 変換であるため,ツリーの形を保存する. Hyperbolic Tree 視覚化アルゴリズムを適用. ただし,C は円もしくは円板Dの中心を通る. して開発した Domain Browser を図 5,図 6に. 直線である. •. 円 C={p p = (x,y) | | p - c |2 = r2}によ. 示す.. る鏡像写像 TC とは,円板 D 内の点 p. −5− 5.
(6) 以下,Hyperbolic Tree 視覚化アルゴリズムが. r=. 性質 1-5 を満たすことを証明する.. exp(d ) − 1 ,角度 t =πとする.証明 2 よ exp(d ) + 1. り,∀p1, p2∈P において,f(p1, p2)(v) = p な. 【命題 1】展望性 Hyperbolic Tree 視覚化アルゴリズムで表. らば,点 p において,距離 r, 角度 t で焦点. 示されたツリーは展望性を満たす.. 性を有する.ゆえにツリーは均質である.. 【証明 1】. 【命題 4】連続性. 円板Dの半径がユークリッド距離で 1 な. Hyperbolic Tree 視覚化アルゴリズムにお. ので,Poincare 円板 D は展望性を満たすこと. ける移動関数 f : P×P → V → P は連続で. は,明らか.Hyperbolic Tree 視覚化アルゴ. ある.. リズムでは,すべてのノードを D 上に配置. 【証明 4】 定義より f(p1, p2) = Tc2 ・Tc1 である.. するので,展望性を満たすことは明らか.. C1 が円のとき c1 を C1 の中心とする.. Hyperbolic Tree 視覚化アルゴリズムでは,ツ リーのノードが Poincare 円板 D の中心にある. lim c1 =. p1 → p2. とき,そのノードに焦点が当たっているとする.. となる.ただし,p p1 = t e + p2 とする.. 【命題 2】焦点性. また,cc2 を C2 の中心とする.このとき,. Hyperbolic Tree 視覚化アルゴリズムで表. 1− | p 2 | 2 c2 = e + p2 2e • p 2. 示されたツリーは,そのノードのひとつが円 板Dの中心にあるとき,そのノードにおいて ユークリッド距離. exp(d ) − 1 ,角度πで焦 exp(d ) + 1. となり,cc2 = lim c1 となる. p1→ p2. 次に半径について r1 を C1 の半径とする.. 点性を有する. 【証明 2】. lim r12 =. p1→ p2. Hyperbolic Tree 視覚化アルゴリズムで表 形の中心角がπであることはそのアルゴリ. r22. ズムより明らか.また,任意の連結されたノ ード間の双曲平面距離を d とすると,その一. (1− | p 2 | 2 ) 2 = (2e • p 2 ) 2. ゆえに r2 = lim r1 である. p1→ p2. 端が円板 D の中心にあるとき,そのユーク. exp(d ) − 1 である. exp(d ) + 1. 以上より,焦点性を有する.. (1− | p 2 | 2 ) 2 (2e • p 2 ) 2. また,r2 を C2 の半径とする.. 示されたツリーの任意のノードが支配的扇. リッド距離は. 1− | p 2 | 2 e + p2 2e • p 2. 以上より lim C1 = C2 となり,鏡像写像の p1→ p2. 性質より. 【命題 3】均質性. ∀p1, p2∈P, ∀v v∈V. lim f(p1, p2)(v) = v P1 → P2. Hyperbolic Tree 視覚化アルゴリズムで表 示されたツリーは均質である.. である.. 【証明 3】. C1 が直線のとき Poincare 円板を回転させても一般性を失. 円板Dの中心を p とする.また,距離. −6− 6.
(7) わないので,p p2 = (d, 0)とし,直線 C1 の方向. ムの性質上,無関係な性質である.例えば Cone. を(p p1 + p2)とする.. Tree が展望性を見たさないことは[9]で証明さ. p1 = d(cos t, sin t)とすると,直線 C1 の方 向は(p p1 + p2) = d(1 + cos t, sin t)となる.. れている.また,DocSpace[12]のようにバネ モデルによる視覚化アルゴリズムでは各性質. t → 0 つまり p1 → p2 ならば直線 C1 の方 向は(2d, 0) つまり(1, 0)となる.. の証明が難しい.たとえば,連続性について考 える.バネモデルでいくつかの局所解が存在し,. 一方 C2 の中心 c2 は次のように表される.. マウスでノードを移動すると局所解から他の. cos t − 1 t (1 − d 2 ) sin t t c2 = p 2 + cos t − 1 d t. 局所解に「ジャンプ」してしまう可能性がない. のように数学的に定義されたアルゴリズムで. c2 は t → 0 で無限遠となり,その方向は(0,. は証明が容易なことが多い.. ことを証明することは困難である.このように 物理モデルを用いた視覚化アルゴリズムでは, 一般に与えられた性質を証明することが困難 である.一方,Fisheye View や Fractal View. 1)となる.つまり,C2 は直線とみなせその. 「Win Explorer」 は Windows での Explorer. 方向は(1, 0)となる.また,C2 の半径と|cc2|. のように,フォルダ(i.e. ツリーのノード)を展. の比は t → 0 で 1 となり,C2 は D の中心を. 開,折り畳みする機能とスクロール機能により. 通る.以上より,t → 0 で C1 = C2.鏡像写. ツリーを可視化するアルゴリズムを述べてい. 像の性質より. る.スクロール機能では,同時にすべてのノー. ∀p1, p2∈P, ∀v v∈V. lim f(p1, p2)(v) = v. ドを見ることができないので,展望性は当然満. P1 → P2. たさない.. である.. 表 1 視覚化アルゴリズムの比較. 【命題 5】追随性 Hyperbolic Tree 視覚化アルゴリズムの移 動関数 f : P×P → V → P が追随性を有す る. 【証明 5】 f(p ps, pd)(p ps) = TC2・TC1 である.ただし, TC1 は ps を pd に移し, TC2 は pd を ps に移す. ゆえに∀p ps, pd)(p ps) = pd である. ps, pd ∈ P. f(p. 4.. 議論. 他のツリー(グラフ)視覚化アルゴリズムが 前記性質 1 から 5 を満たしているかを表 1に まとめた. 「○」は性質を満たすことが容易に. 性 質 1 Cone Tree[5] × InformationCube[6] × Generalized ○ Fisheye View[7] H3[8] ○ Fractal View[9] × --納豆 View[10] TreeMap[11] × DocSpace[12] ? Win Explorer (スク × ロール+折り畳み). 性 質 2 × ○ ○. 性 質 3 × ○ ×. 性 質 4 ○ ○ ○. 性 質 5 ○ ○ ○. ○ ○ ○ ○ ? ○. ○ ○ ○ ○ ? ○. ○ --○ ○ ? ○. ○ --○ ○ ○ ○. ○:満たすことを証明できる. ×:満たさないこと. 証明できると思われるもの,「×」は性質を満 たさない反例を挙げることができるもの,「?」. を証明できない.. は証明が容易でないもの, 「---」 はアルゴリズ. せず,もしくは不明. −7− 7. ?:証明が困難.. ---:サポート.
(8) 5.. 3D. まとめ. of. Hierarchical. Information, CHI'91, pp. 189-194, April. 要求仕様を数学的に厳密に与えることで,そ. 1991. れを満たす可視化アルゴリズムを選択する実 例を述べた.本件のように要求仕様を証明する. Visualizations. [6] 暦本,"Information Cube: 半透明表示を. には, Hyperbolic Tree 視覚化アルゴリズムが,. 用いた 3 次元情報視覚化技法", WISS 93,. 物理モデルではなく,数学モデルに基づいてい. pp 1--8, 1993. ることが大きかった.物理モデルで解析的に解. [7] W. Furnas, Generalized fisheye views, CHI '86, pp. 16--23. ACM Press, 1986.. ける場合ではなく,発見的に解法を得ている場 合であると,要求仕様を満たすことを示すこと. [8] Tamara Munzner, H3: Laying Out. が困難である.Hyperbolic Tree 視覚化アルゴ. Large. リズムは Poincare 円板という数学モデルに基. Hyperbolic Space, Proc. of the 1997. づいているために証明が容易であった.この点. IEEE. が数学的モデルに基づく視覚化アルゴリズム. Visualization, pp. 2-10, October 1997. Directed. Graphs. Symposium Koike,. on. in. 3D. Information. が物理モデルに基づくアルゴリズムや,モデル. [9] Hideki. Hirotaka. に基づかない発見的な視覚化アルゴリズムよ. Fractal. り有利な点である.. Huge Hierarchies, Proc. of 1993 IEEE. Approaches. Symposium. on. for. Visual. Yoshihara,. Visualizing Languages. (VL'93), pp. 55-60, 1993. 参考文献 [1] Toshio TONOUCHI, Domain Browser. [10] 塩澤 秀和, 西山 晴彦, 松下 温, "「納豆ビ. Homepage,. ュー」の対話的な情報視覚化における位置. http://www.doc.ic.ac.uk/~tton/DomainBr. づけ", 情報処理学会論文誌, Vol. 38, No.. owser/, 2001. 11, pp. 2331-2342, November 1997. [2] N. Damianou, N. Dulay, E. Lupu, and. [11] Brian. Johnson,. Ben. Shneiderman,. M. Sloman Ponder: A Language for. Treemaps: A Space-Filling Approach to. Specifying Security and Management. the. Policies for Distributed Systems, 2001. Information Structures, Proc. of the 2nd. [3] Marvin Jay Greenberg, Euclidean and. Non-Euclidean. Geometries. Visualization. International. —. of. IEEE. Hierarchical Visualization. Conference, pp. 284-291, October 1991. H.. [12] 館村, "DocSpace: 文献空間のインタラク. Freeman and Company, 1973, ISBN. ティブ視覚化", インタラクティブシステ. 0-7167-0454-4. ムとソフトウェア IV: 日本ソフトウェア. Development. and. History,. W.. 科学会 WISS'96, pp. 11-20 , December. [4] John Lamping, Ramana Rao, and Peter Pirolli,. A Focus+Context Technique. Based on Hyperbolic Geometry for. 1996 [13] Julian Hatchwell, Distributed Policy. Visualizing Large Hierarchies, CHI 95. Management, MSc thesis of Imperial. [5] George Robertson, Jock D. Mackinlay,. College of Science, Technology and. Stuart K. Card, Cone Trees: Animated. Medicine, September 2000. −8− 8.
(9)
図
関連したドキュメント
(4) 「Ⅲ HACCP に基づく衛生管理に関する事項」の3~5(項目
医師と薬剤師で進めるプロトコールに基づく薬物治療管理( PBPM
Amount of Remuneration, etc. The Company does not pay to Directors who concurrently serve as Executive Officer the remuneration paid to Directors. Therefore, “Number of Persons”
「核原料物質,核燃料物質及び原子炉の規制に関する法律」 (昭和32年6月10日
領海に PSSA を設定する場合︑このニ︱条一項が︑ PSSA
Concurrent Education in mechanical engineering using PBL at Kokushikan University.. Toshio Otaka *1 , Ken Kishimoto *1 , Yasuhiro Honda *1 , Tomoaki
保税地域における適正な貨物管理のため、関税法基本通達34の2-9(社内管理
「二酸化窒素に係る環境基準について」(昭和 53 年、環境庁告示第 38 号)に規定する方法のう ちオゾンを用いる化学発光法に基づく自動測
