㸨1Ph. D. student, Department of mechanical engineering, Doshisha University, Kyoto Telephone: +81-774-65-6488, Fax: +81-774-65-6488, E-mail :etl1303@mail4.doshisha.ac.jp
㸨2Department of mechanical engineering, Doshisha University, Kyoto
ࡣࡌࡵ
⏝㌴⏝ࢱࣖࡢᡥᖹ࠾ࡼࡧࢧࢫ࣌ࣥࢩࣙࣥࡢ㧗
๛ᛶక࠸㸪㌴ᐊෆ㦁㡢࠾࠸࡚ࢱࣖື⮬యࡀ ධຊ※࡞ࡿ300Hz௨ୗࡢ࣮ࣟࢻࣀࢬࡀ㢧ⴭ࡞ࡗ
࡚࠸ࡿ 1)㸬࣮ࣟࢻࣀࢬࡣ㊰㠃ࡢพฝࡼࡾࢱࣖࡀ
ືࡋ㸪ࡑࡢືࡀ㌴㍈ࢆ㏻ࡋ࡚㌴ᐊෆఏ㐩ࡍࡿ㦁 㡢ࡢࡇ࡛࠶ࡿ㸬ࡑࡢࡓࡵ㸪㌴㍈ື㌴ᐊෆ㦁㡢ࡢ 㛵ಀゎ᫂㛵ࡍࡿ◊✲ࡀ⾜ࢃࢀ࡚࠾ࡾ㸪≉ୖୗ㌴㍈
ື㸦௨ୗ㸪㌴㍈ື㸧 ࡘ࠸࡚ࡣᙳ㡪ࡀࡁ࠸ࡇ
ࡀሗ࿌ࡉࢀ࡚࠸ࡿ2)㸬
㌴యࡢ㒊ศᵓ㐀ࡋ࡚㸪ࢱࣖ㌿ືࡢ㌴㍈ືࢆ
ண ࡍࡿࡇࡀ࡛ࡁࢀࡤ㸪ຠ⋡ⓗ࡞࣮ࣟࢻࣀࢬࡢప ῶ㸪ࡉࡽࡣ㛤Ⓨ㛫ࡢ▷⦰ࡘ࡞ࡀࡿ 3)㸬ࡇࡢࡁ㸪
㌴㍈ືࡢண ⢭ᗘ㛵ࢃࡿ㔜せ࡞ၥ㢟ࡀ㸪㌿ືࡢ
ࣔࢹࣝࢩ࣑࣮ࣗࣞࢩࣙࣥࣔࢹࣝࡢධຊ᮲௳࡛࠶
ࡿ㸬ࡑࡢࡓࡵ㸪ࢱࣖࡢࣔࢹࣝࢆྵࡵ㊰㠃ධຊࢆᢕ ᥱࡍࡿࡇࡀ㔜せ࡞ၥ㢟ࡢ୍ࡘ࡞ࡗ࡚࠸ࡿ㸬ࡇࢀࡲ
࡛ᵝࠎ࡞ᡭἲࢆ⏝࠸࡚㊰㠃ධຊࡢྠᐃࡀ⾜ࢃࢀ࡚ࡁࡓ ࡀ㸪ࢱࣖື≉ᛶࡢᙳ㡪ࢆཷࡅࡿࡓࡵ᮲௳㐪࠸ࡼ
ࡾᐇ㦂࣭ゎᯒࡀᚲせ࡞ࡿ㸬ᮏ◊✲ࡣ㌿ືࡢࢱࣖ
ື≉ᛶཬࡧᚤᑠ✺㉳ࡼࡿࢱࣖືఏ㐩≉ᛶࢆ᫂
ࡽࡋࡓୖ࡛㸪1⮬⏤ᗘࢱࣖࣔࢹࣝࢆᥦࡋ㸪㌴
Prediction of Vertical Spindle Force due to Loaded and Rolling Tire
Masami MATSUBARA*1, Takayuki KOIZUMI*2, Nobutaka TSUJIUCHI*2 (Received April 6, 2013)
It is important to predict the interior noise of a passenger car for evaluation of performance of NVH. There are many sound sources including engine, power train, and tire in the passenger car. In particular, the dynamic force transmission of rolling tires from the road surface to the spindle is a critical factor in interior noise of the passenger car. We focus on structure-borne noise transferred through the spindle. It is necessary for effort of the effective tire/road noise reduction to predict spindle force excited by tire/road contact. The important issues for predicting spindle forces are tire model and how to input on the model because tire vibration characteristic change generated by rolling and contact. In this paper, we suggest the simple prediction of vertical spindle force that affect the interior noise clearly.
First, we measures the spindle force generated by a projection and multiple projections. And we check the linearity of spindle force. It is found that we can predict the spindle force generated by optional projections based on the spindle force excited by a basic projection. Second, based that first mode of tire don’t change generated by rolling, one degree model of a rolling tire is built up. Road force is identified from spindle force using this tire model. Finally, an estimation method of spindle force for any tire-rolling speed and height of cleat is proposed based on the identified road force.
.HUZRUG: tire, vertical spindle force, estimation of road input, road noise
࣮࣮࢟࣡ࢻ: ࢱࣖ㸪ୖୗ㌴㍈ື㸪㊰㠃ධຊ᥎ᐃ㸪࣮ࣟࢻࣀࢬ
ࢱࣖ᥋ᆅ࣭㌿ື࠾ࡅࡿୖୗ㌴㍈ືண
ᯇཎ ┿ᕫ㸪ᑠἨ Ꮥஅ㸪㎷ෆ ఙዲ
㍈ືࡽ㊰㠃ධຊࢆྠᐃࡍࡿ㸬ࡑࡢྠᐃ⤖ᯝࢆඖ㸪
⡆᫆௵ព᮲௳ୗࡢ㌴㍈ືࢆண ࡍࡿ᪉ἲࢆᥦࡍ
ࡿ㸬
✺㉳ࡾ㉺ࡋヨ㦂᪉ἲ ࣮ࣟࢻࣀࢬ㊰㠃ࡢᚤᑠ✺㉳ᙧ≧ࣔࢹࣝ
ࢩ࣑࣮ࣗࣞࢩࣙࣥ࠾࠸࡚௵ព㊰㠃ࢆࡢࡼ࠺
⡆᫆ࣔࢹࣝࡍࡿࡣၥ㢟࡛࠶ࡿ㸬ᒣ⏣ 4)ࡣ㊰㠃ࡢ พฝࢆ༢୍✺㉳ࡢ㞟ྜయ࡛⾲⌧ࡋ㸪༢୍✺㉳ࡾ㉺ࡋ
Ⓨ⏕ࡍࡿ㌴㍈ືࢆ㔜ࡡྜࢃࡏࡿࡇ࡛㸪௵ព㊰
㠃㉮⾜ࡢ㌴㍈ືࢆண ࡍࡿ᪉ἲࢆᥦࡋ࡚࠸ࡿ㸬
Fig. 1ࡣࡑࡢᴫせᅗ࡛࠶ࡿ㸬ᮏᡭἲ࠾ࡅࡿ༢୍✺㉳
ᙧ≧ࡣ⟄ᙧ≧✺㉳ࢆ᥇⏝ࡋ࡚࠸ࡿࡇࡽ㸪ᮏ◊✲
࠾࠸࡚ࡶྠᵝ⟄ᙧ≧✺㉳㸦௨ୗ㸪✺㉳㸧ࢆ᥇⏝
ࡍࡿࡶࡢࡍࡿ㸬✺㉳ࡣ┤ᚄ 10 mm㸪㧗ࡉ 1.5mm㸪
3.0mm㸪4.5mm㸪6.0mmࡢࡶࡢࢆ⏝ࡋࡓ㸬
Fig. 1. Characterization of road.
ヨ㦂ᴫせ
Fig. 2 ヨ㦂ࢱࣖࢆ♧ࡍ㸬ࢱࣖࢧࢬࡣ
195/65/R15㸪⁁ࢆ᭷ࡋࡓࣛࢪࣝࢱࣖࢆ⏝ࡋࡓ㸬
ヨ㦂ᴫ␎ᅗࢆFig. 3♧ࡍ㸬ࢱࣖ༢యࢻ࣒ࣛヨ㦂ᶵ ࡢࢻ࣒ࣛᑐࡋ࡚ࢱࣖࢆᢲࡋࡅ㸪ࢻ࣒ࣛࢆᅇ㌿ࡉ ࡏࡿࡇ࡛ࢱࣖࢆ㐃ࢀᅇࡾࡉࡏࡿ㸬ࡇࡢࡁ㸪ࢻࣛ
࣒⾲㠃ୖྲྀࡾࡅࡓ✺㉳ࡼࡾບ㉳ࡉࢀࡓ㌴㍈ື
ࢆィ ࡍࡿ㸬✺㉳᥋ゐ⨨㸦௨ୗ㸪ධຊ⨨㸧ࡣ Fig.
3ࡢྛࢺࣞࢵࢻࣜࣈ㒊ࡢ୍Ⅼࡋ㸪༢✺㉳㸪ከ✺㉳
࡛ヨ㦂ࢆ⾜ࡗࡓ㸬㌴㍈Ⲵ㔜ࡣ4200N㸪ࢱࣖෆᅽࡣ 230kPaࡋࡓ㸬
Fig. 2. Test tire.
Fig. 3. Test setup.
✺㉳ࡾ㉺ࡋࡢୖୗ㌴㍈ື≉ᛶ ㌿ື㏿ᗘ㐪࠸࠾ࡅࡿ㌴㍈ື≉ᛶ
ධຊ⨨ࢆࢭࣥࢱ࣮㒊ࡋ㸪✺㉳ࡾ㉺ࡋヨ㦂ࢆᐇ
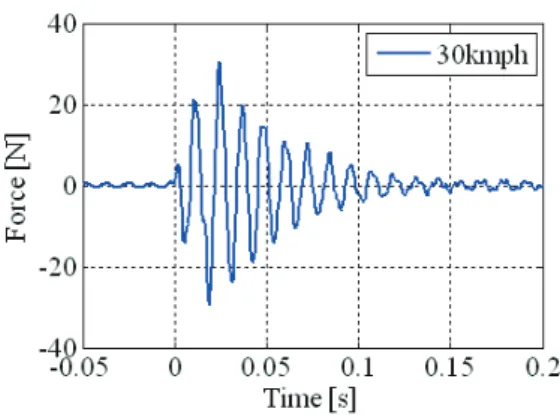
ࡋࡓ㸬Fig. 4(a)㌿ື㏿ᗘ30km/hࡢ㌴㍈ືࢆ♧
ࡍ㸬✺㉳㧗ࡉࡣ1.5mmࡋࡓ㸬Fig. 4(b)㌿ື㏿ᗘ30,
50km/h ࡢ㌴㍈ືࡢࣃ࣮࣡ࢫ࣌ࢡࢺࣝᐦᗘ㛵ᩘࢆ
♧ࡍ㸬✺㉳ࡾ㉺ࡋ≉ᛶࡢ≉ᚩࡣ㸪㊰㠃ධຊࡢ࿘Ἴᩘ
≉ᛶࢱࣖື≉ᛶࡀ᭷ࡍࡿඹ࿘Ἴᩘࡀ⤌ࡳྜࢃ
ࡉࢀࡿ⤖ᯝ㸪1ḟඹࡢPeak to Peak್ࡀ㏿ᗘ౫Ꮡࡍ
ࡿࡇ࡛࠶ࡿ㸬ୖୗ㌴㍈ື1ḟඹᐤࡍࡿࢱ
ࣖື࣮ࣔࢻࡣᅇ㌿ຠᯝࡢᙳ㡪㸪᥋ᆅࡼࡿቃ⏺᮲௳
ࡢኚࡢᙳ㡪ࢆ↓ど࡛ࡁࡿࡇࡽ5)㸪Fig. 4(b)࠶ࡿ
ࡼ࠺㌿ື㏿ᗘࡼࡽࡎ 80Hz㏆༟㉺ࡋࡓඹ࿘
Ἴᩘࡀ࠶ࡿࡶࡢ⪃࠼ࡽࢀࡿ㸬
Fig. 4(a). Vertical spindle force due to cylindrical cleat.
Fig. 4(b). Power spectrum density of spindle force.
✺㉳㧗ࡉ㐪࠸࠾ࡅࡿ㌴㍈ື≉ᛶ
ධຊ⨨ࢆࢭࣥࢱ࣮㒊ࡍࡿ✺㉳ࡾ㉺ࡋヨ㦂ࢆᐇ
ࡋ㸪㌿ື㏿ᗘ 30km/hࢆ୍ᐃࡋ㸪✺㉳㧗ࡉ㐪࠸
ࡼࡿ㌴㍈ືࡢኚࢆᢕᥱࡋࡓ㸬✺㉳㧗ࡉࢆ1.5mm㸪 3.0mm㸪4.5mm㸪6.0mmࡋࡓࡁࡢ㌴㍈ືࢆ Fig.
5(a)♧ࡍ㸬ྛ㌴㍈ືࡽ㸪✺㉳㧗ࡉࡼࡽࡎᛂ⟅
Ἴᙧࡢഴྥࡣྠࡌ࡛࠶ࡿ㸬ࡲࡓ㸪Fig. 5(b)㌴㍈ື
ࡢ Peak to Peak್ࢆ♧ࡍ㸬✺㉳㧗ࡉᛂࡌ࡚ᛂ⟅ࣞ࣋
ࣝࡀࡁࡃ࡞ࡗ࡚࠸ࡿࡇࡀࢃࡿ㸬
ከ✺㉳࠾ࡅࡿ㌴㍈ື
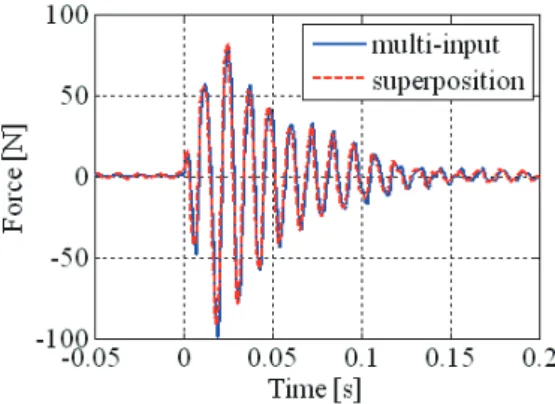
ᖜ᪉ྥ✺㉳㧗ࡉ 1.5mmࡢ✺㉳ࢆ」ᩘಶࡾ㉺ࡋ ࡓࡁࡢ㌴㍈ືࡘ࠸࡚⪃࠼ࡿ㸬Fig. 6ࡣࢩࣙࣝࢲ
࣮㒊ࢭࣥࢱ࣮㒊ࡢⅬධຊ㸪Fig. 7ࡣࢩࣙࣝࢲ࣮㒊㸪
࣑ࢹ࢚ࢺ㒊ࢭࣥࢱ࣮㒊ࡢ୕Ⅼධຊ࠾ࡅࡿ㌴㍈
ື࡛࠶ࡿ㸬ࡲࡓ㸪ྛධຊ⨨࠾ࡅࡿ༢✺㉳ࡾ㉺
ࡋࡢ㌴㍈ືࢆ㔜ࡡྜࢃࡏࡓἼᙧࢆేࡏ࡚ᅗ♧ࡋࡓ㸬
ྠᵝ๓ᚋ᪉ྥ✺㉳ࢆ」ᩘಶࡾ㉺ࡋࡓࡁࡢ㌴
㍈ືࢆ⪃࠼ࡿ Fig. 8㸰ࡘࡢ✺㉳ࢆࢭࣥࢱ࣮㒊๓ᚋ
᪉ྥ㓄⨨ࡋࡓࡁࡢ㌴㍈ືࢆ♧ࡍ㸬࡞࠾㸪๓ᚋ᪉
ྥࡢ✺㉳㛫㊥㞳ࢆ 50 mmࡋࡓ㸬᥋ゐ㛤ጞ㛫ࢆ⪃
៖ࡋ㸪༢✺㉳ࡾ㉺ࡋࡢ㌴㍈ືࢆ㔜ࡡྜࢃࡏࡓἼ ᙧࢆేࡏ࡚ᅗ♧ࡋࡓ㸬
Fig. 6-8ࡢ⤖ᯝࡽ㸪ᖜ᪉ྥ࠾ࡼࡧ๓ᚋ᪉ྥࡢ✺㉳
ࡼࡿ」ᩘධຊᑐࡋ࡚㸪ྛධຊᑐᛂࡍࡿ༢✺㉳ࡾ
㉺ࡋࡢ㌴㍈ືࡀࢃࢀࡤ⥺ᙧࡋ࡚ண ࡛ࡁࡿ
ࡇࡀࢃࡗࡓ㸬
Fig. 5(a). Vertical spindle force at height of cleat (30km/h).
Fig. 5(b). Vertical spindle force at height of cleat (30km/h).
Fig. 6. Spindle force due to shoulder and center cleats.
Fig. 7. Spindle force due to shoulder, mediate and center cleats.
Fig. 8. Spindle force due to center cleats.
ୖୗ㌴㍈ື㉳ᅉࡍࡿࢱࣖື
ࢱࣖ㌴㍈㛫ࡢືఏ㐩≉ᛶ
ືఏ㐩≉ᛶࢆᢕᥱࡍࡿࡓࡵ㸪᭷㝈せ⣲ࣔࢹࣝࢆ
⏝࠸࡚㠀᥋ᆅ࣭㌿ື࠾ࡅࡿ࿘Ἴᩘᛂ⟅ゎᯒࢆᐇ
ࡋࡓ㸬Fig. 9ゎᯒ⤖ᯝ࡞ືᙧ≧ࢆ♧ࡍ㸬ධຊ
ࡣࢭࣥࢱ࣮㒊ἲ⥺᪉ྥ㸪ᛂ⟅ࡣධຊ᪉ྥࡢ㌴㍈ື
ࡋࡓ㸬ࡇࡢ⤖ᯝࡽ㸪ୖୗ㌴㍈ື࠾࠸࡚ࡣ㸪࿘᪉
ྥ࣮ࣔࢻࡢ1ḟࡀᨭ㓄ⓗ࡛࠶ࡿࡇࡀࢃࡿ㸬2ḟ௨ 㝆ࡣືᙧ≧ࡀ㍈ᑐ㇟࡛࠶ࡿࡓࡵ㸪㌴㍈ືࡀບ㉳ࡉ
ࢀࡃ࠸ࡇࡀࢃࡿ㸬
Fig. 9. Frequency response function and main vibration shape.
ࢱࣖ ⮬⏤ᗘࣔࢹࣝ
᥋ᆅ࣭㌿ືࡢࢱࣖື≉ᛶࡣ᥋ᆅ㠃ࡼࡿቃ⏺
᮲௳ࡢᙳ㡪㸪ᅇ㌿ຠᯝࡢᙳ㡪㸪ࢦ࣒ᮦᩱ≉ᛶࡢᙳ㡪ࢆ
ཷࡅࡿࡓࡵ㸪㠀᥋ᆅ࣭㠀㌿ືࡢࢱࣖື≉ᛶࡽ
ኚࡍࡿ㸬ࡑࡢࡓࡵ㸪✺㉳ࡾ㉺ࡋࡢࢱࣖࢆࡢ
ࡼ࠺ࣔࢹࣝࡍࡿࢆ⪃࠼ࡿᚲせࡀ࠶ࡿ㸬
➹⪅ࡽࡣඛ⾜◊✲ࡋ࡚㸪࿘᪉ྥ1ḟ࣮ࣔࢻࡘ࠸
࡚ᐇ㦂࣭ゎᯒࢆ⾜ࡗࡓ 5-6)㸬ࡑࡢ⤖ᯝࡼࡾ㸪᥋ᆅ࣭㌿
ື࠾ࡅࡿቃ⏺᮲௳ࡢᙳ㡪㸪ᅇ㌿ຠᯝࡢᙳ㡪ࡣ↓ど
࡛ࡁ㸪1ḟ࣮ࣔࢻࡣᐃᅾⓗບ㉳ࡉࢀࡿ㸬ࡉࡽ㸪ࢦ
࣒ᮦᩱ≉ᛶࡢᙳ㡪ࡼࡾ㌴㍈Ⲵ㔜౫Ꮡࡋ࡚ࢱࣖ๛
ᛶࡀపୗࡍࡿࡇ᫂ࡽࡋࡓ㸬ࡲࡓ㸪ࢱࣖ๛ᛶࡣ
㏿ᗘ౫Ꮡࡼࡾࡶ㸪㌿ືࡍࡿࡇࡼࡾ㢧ⴭపୗࡍࡿ㸬 ࡑࡢⅭ㸪ࢱࣖ࿘᪉ྥ1ḟ࣮ࣔࢻࡣ༢⣧࡞1⮬⏤ᗘ
ື⣔࡛⾲⌧ྍ⬟࡛࠶ࡿࡇࡀࢃࡗࡓ㸬
Fig. 10ࢱࣖືࣔࢹࣝࢆ♧ࡍ㸬࣮࣍ࣝ㸫㌴㍈
⣔ࡣࢱࣖᑐࡋ࡚㧗๛ᛶ࡛࠶ࡿ⪃࠼㸪๛యࡋ࡚
ྲྀࡾᢅ࠸㸪㌴㍈ືࢆືບ㉳ຊᑐࡍࡿఏ㐩ຊ⪃
࠼ࡿ㸬
m
ࡣ㌿ືࡢ 1ḟ࣮ࣔࢻ㉁㔞㸪c
rotࡣ㌿ືࡢ1ḟῶᩘᐃᩘ㸪
k
rotࡣ㌿ືࡢ1ḟ࣮ࣔࢻ๛ᛶࢆ♧ࡍ㸬ࡇࡢࡁࡢ㐠ື᪉⛬ᘧ㌴㍈ືࡣḟᘧࡢࡼ࠺
⾲ࡉࢀࡿ㸬
t f z dt k c dz dt
z
md 2 rot rot
2 (1)
z dt k c dz
fspindle rot rot (2)
ࡇࡢࡁ㸪ධຊࢆࣥࣃࣝࢫධຊࡋࡓሙྜ㸪㌴㍈
ືࡣḟᘧࡢࡼ࠺ᘧኚᙧ࡛ࡁࡿ㸬
e t I t e tt t I
t m e
t k I t m e
t I c t f
d t d n d
t
d t d rot d t d rot
spindle
n n
n n
Z Z Z Z
9 9
Z Z Z Z
9Z 9Z
9Z 9Z
sin 1 sin
2
sin sin
2 2
' w
w
'
'
¸¸¹
·
¨¨©
§ ' w
w
(3)
I
ࡣࣥࣃࣝࢫࡢࡁࡉ㸪' t
ࡣ༢୍ࣥࣃࣝࢫධຊࡢస⏝㛫㸦ཪࡣ㞳ᩓ㛫㸧┦ᙜࡍࡿ㸬ᘧ(3)ࡼࡾ㸪
㌿ືࡢᅛ᭷ゅືᩘZn㸪ῶ⾶ẚ] ࡢࡳ࡛㌴㍈ᛂ⟅
ゎᯒࢆ⾜࠺ࡇࡀ࡛ࡁࡿ㸬௵ពධຊᑐࡋ࡚ࣥࣃࣝ
ࢫධຊ࡛㞳ᩓࡋ㸪␚ࡳ㎸ࡳ✚ศࡼࡾ㌴㍈ືࢆィ
⟬ࡍࡿ㸬ᮏ◊✲࡛ࡣ㸪1ḟඹࡀ༟㉺ࡋ࡚ບ㉳ࡉࢀ࡚
࠸ࡿ㌿ື㏿ᗘ30 km/hࡢ㌴㍈ືᑐࡋ࡚㸪ධຊࢆ
ࣥࣃࣝࢫධຊ௬ᐃࡍࡿࡇ್࡛༙ᖜἲࢆ㐺⏝ࡍࡿࡇ
࡛㌿ືࡢᅛ᭷ືᩘῶ⾶ẚࢆྠᐃࡋࡓ㸬
ୖୗ㌴㍈ືண ㊰㠃ධຊྠᐃ
ᐇ ࡋࡓ༢✺㉳ࡾ㉺ࡋࡢ㌴㍈ືࡽ㞳ᩓ
ࣥࣃࣝࢫධຊࢆྠᐃࡍࡿ㸬㞳ᩓࣥࣃࣝࢫධຊࢆḟ ࡢࡼ࠺ᐃ⩏ࡍࡿ㸬
>
n@
input I I I
I 1, 2,, (4)
ホ౯㛵ᩘࢆ㌴㍈ືࡢᐇ㦂್ゎᯒ್ࡢ㸰ࣀ࣒ࣝ
ࡋ㸪ホ౯㛵ᩘࡀ᭱ᑠ್࡞ࡿࡼ࠺㞳ᩓࣥࣃࣝ
ࢫධຊࢆ᭱㐺ࡍࡿ㸬ホ౯㛵ᩘࡣḟᘧࡢࡼ࠺࡞ࡿ㸬
^
fspindle festimation I1,I2, ,In`
2Error (5)
᥎ᐃࡣ᭱㐺ࢶ࣮࡛ࣝ࠶ࡿMode frontierࡢ↝ࡁ࡞ࡲ
ࡋἲࢆ⏝࠸ࡓ㸬㌿ື㏿ᗘ30 km/h㸪✺㉳㧗ࡉ1.5 mm
࠾ࡅࡿ᭱㐺ࡢ⤖ᯝࢆFig. 11♧ࡍ㸬Fig. 11(a)ࡣ᭱㐺
ࡋࡓ㞳ᩓࣥࣃࣝࢫධຊ㸪Fig. 11(b)ࡣࡑࡢࡁࡢ
㌴㍈ືࢆ♧ࡍ㸬
㌿ື㏿ᗘ㐪࠸࠾ࡅࡿ㌴㍈ື᥎ᐃ
㌿ື㏿ᗘ㐪࠸࠾ࡅࡿ㌴㍈ືࡢኚࡣධຊ≉ᛶኚ
ࡀᅉ⪃࠼ࡽࢀࡿ㸬ࡲࡓ㸪㌿ື㏿ᗘ౫Ꮡࡏࡎ᥋ ᆅ㠃ෆᅽຊศᕸࡣ୍ᐃ࡛࠶ࡿࡇࡽ7)㸪ධຊศᕸࡢ
Fig. 10. tire model for prediction of vertical spindle force.
Fig. 11(a). Identification of road force due to 1.5 mm cleat at rolling speed 30 km/h.
Fig. 11(b). Comparison of spindle force between estimation and experiment.
ࡁࡉࡣኚࢃࡽࡎ㸪ධຊ㛫ࡀኚࡋࡓࡶࡢ᥎ᐹࡉ
ࢀࡿ㸬ࡑࡇ࡛㸪ࡍ࡛ྠᐃࡋࡓ㞳ᩓࣥࣃࣝࢫධຊ
ࢆ⏝࠸࡚㸪௵ព㌿ື㏿ᗘ࠾ࡅࡿ㌴㍈ືࢆ᥎ᐃࡍࡿ
᪉ἲࢆ⪃࠼ࡿ㸬
㌿ື㏿ᗘV1࠾࠸࡚ධຊࢆྠᐃࡍࡿ㸬ྠᐃࡋࡓ㞳 ᩓࣥࣃࣝࢫධຊࡢࡁࡉࢆIinput㸪༢୍ࣥࣃࣝ
ࢫධຊࡢస⏝㛫't1ࡍࡿ㸬ࡇࡢࡁ㸪ධຊస⏝
㛫
t
1ࡍࡿ㸬ࡇࡢࡁ㸪ධຊస⏝㛫t
1ࡣḟࡢࡼ࠺࡞ࡿ㸬
1
1 n t
t ' (6)
ࡇࡇ࡛㸪nࡣࣥࣃࣝࢫධຊᩘࢆ⾲ࡍ㸬ࡍ࡞ࢃࡕ㸪
input
I ࡢࢹ࣮ࢱᩘᑐᛂࡍࡿ㸬㌿ື㏿ᗘV2ࡢධຊࡢ
ࣥࣃࣝࢫධຊᩘࡀྠࡌࡍࡿ㸬ࡇࡢࡁ㸪ධຊస⏝
㛫t2ࡣḟᘧ࡞ࡿ㸬
2
2 n t
t ' (7)
ධຊస⏝㛫ࡣ✺㉳ࡀ᥋ᆅ㠃ෆ࠶ࡿ㛫┦ᙜࡍ
ࡿࡇࡽ㸪ḟᘧࡀᡂࡾ❧ࡘ㸬
2 2 1
1V n tV t
n' ' 1
2
2 1 t
V
t V '
'
(8)
㌿ື㏿ᗘ30 km/h㸪✺㉳㧗ࡉ1.5 mm㸪ࢭࣥࢱ࣮㒊ධ
ຊࡋࡓሙྜࡢධຊࢆ⏝࠸࡚㸪㌿ື㏿ᗘ 50 km/h࠾ࡅ
ࡿධຊࢆ᥎ᐃࡋࡓ㸬᥎ᐃࡋࡓධຊࢆFig. 12(a)♧ࡍ㸬 ᥎ᐃࡋࡓධຊࢆ⏝࠸࡚ண ࡋࡓ㌴㍈ືࢆFig. 12(b)
♧ࡍ㸬ࡇࡢ⤖ᯝࡽ㸪㌴㍈ືࡣⰋዲ୍⮴ࡋ࡚࠸ࡿ
ࡇࡽ㸪㌿ື㏿ᗘ㐪࠸࠾ࡅࡿ㌴㍈ࢆண ྍ⬟࡛࠶
ࡿࡇࡀࢃࡿ㸬
✺㉳㧗ࡉ㐪࠸࠾ࡅࡿ㌴㍈ື᥎ᐃ
࣊ࣝࢶࡢ᥋ゐ⌮ㄽࡼࡾ㸪ᚤᑠ✺㉳ࡾ㉺ࡋࡢධ ຊࡢࡁࡉࡣ㸪ࡑࡢᚤᑠ✺㉳ࡢ௦⾲༙ᚄࡢ 3/2ẚ
ࡍࡿࡇࡀሗ࿌ࡉࢀ࡚࠸ࡿ 8)㸬ࡑࡇ࡛㸪௦⾲༙ᚄ
✺㉳㧗ࡉࡀẚࡍࡿࡶࡢࡋ࡚㸪✺㉳㧗ࡉ㐪࠸࠾ࡅ
ࡿධຊࡢࡁࡉࢆ᥎ᐃࡍࡿ㸬
࣊ࣝࢶࡢ᥋ゐ⌮ㄽࡀᡂࡾ❧ࡘࡍࡿ㸪✺㉳㧗ࡉ
h1ᑐࡍࡿࣥࣃࣝࢫධຊࡢࡁࡉIn,1㛵ࡋ࡚ḟ ᘧࡀᡂࡾ❧ࡘ㸬
2 3 1 1
, C h
In n (9)
ࡇࡇ࡛㸪ῧ࠼Ꮠࡢnࡣn␒┠ࡢ㞳ᩓࣥࣃࣝࢫධຊ
ࢆ⾲ࡍ㸬ྠᵝ✺㉳㧗ࡉh2ᑐࡍࡿࣥࣃࣝࢫධຊ ࡢࡁࡉIn,2㛵ࡋ࡚ࡶḟᘧࡀᡂࡾ❧ࡘ㸬
2 3 2 2
, C h
In n (10)
ࡇࡇ࡛㸪ᘧ(9)㸪(10)ࡼࡾ㸪ḟᘧࡀᡂࡾ❧ࡘ㸬
1 , 2 3
1 2 2 2 ,
3 2 2 3 1 2 ,
1 ,
n n
n n n
n I
h I h h
C h C I I
¸¸¹
·
¨¨©
§ (11)
ᘧ(11)ࡣ࠶ࡿ✺㉳㧗ࡉᑐࡍࡿධຊࢆྠᐃࡍࡿࡇࡀ
࡛ࡁࢀࡤ㸪௵ពࡢ✺㉳㧗ࡉᑐࡍࡿධຊࢆ᥎ᐃࡍࡿࡇ
Fig. 12(a). Estimation of road force due to 1.5 mm cleat at rolling speed 50 km/h.
Fig. 12(b). Comparison of spindle force between estimation and experiment.
Fig. 13(a). Estimation of road force due to 3.0 mm cleat at rolling speed 30 km/h.
Fig. 13(b). Comparison of spindle force between estimation and experiment.
ࡀ࡛ࡁࡿࡇࢆពࡍࡿ㸬㌿ື㏿ᗘ 30 km/h㸪✺㉳
㧗ࡉ 1.5 mm㸪ධຊ⨨ࢭࣥࢱ࣮㒊ࡢ᮲௳࠾࠸࡚ྠ
ᐃࡋࡓධຊࢆ⏝࠸࡚㸪✺㉳㧗ࡉ 3.0 mm࠾ࡅࡿධຊ
ࢆ᥎ᐃࡋࡓ㸬᥎ᐃࡋࡓධຊࡢ⤖ᯝࢆFig. 13(a)♧ࡍ㸬
ࡲࡓ㸪᥎ᐃࡋࡓධຊࢆ⏝࠸࡚ண ࡋࡓ㌴㍈ືࢆ Fig.
13(b)♧ࡍ㸬ࡇࡢ⤖ᯝࡽ㸪㌴㍈ືࡣⰋዲ୍⮴ࡋ
࡚࠸ࡿࡇࡽ㸪✺㉳㧗ࡉ㐪࠸࠾ࡅࡿ㌴㍈ࢆண ྍ
⬟࡛࠶ࡿࡇࡀࢃࡿ㸬
ࡲࡵ
ᮏ◊✲࡛ࡣ㸪ᚤᑠ✺㉳ࡼࡿࢱࣖືఏ㐩≉ᛶࢆ
᫂ࡽࡋࡓୖ࡛㸪1⮬⏤ᗘࢱࣖࣔࢹࣝࢆᥦࡋ㸪
⡆᫆௵ព᮲௳ୗࡢ㌴㍈ືࢆண ࡍࡿ᪉ἲࢆᥦࡋ ࡓ㸬௨ୗᚓࡽࢀࡓ▱ぢࢆ♧ࡍ㸬
1. ከ✺㉳ࡾ㉺ࡋࡢ㌴㍈ືࡀ༢✺㉳ࡾ㉺ࡋ
ࡢ㌴㍈ືࡢ㔜ࡡྜࢃࡏ࡛⾲⌧࡛ࡁࡿࡇࢆ♧ࡋ㸪 ᚤᑠ✺㉳ࡼࡾບ㉳ࡉࢀࡿ㌴㍈ືࡣ⥺ᙧᛶࢆ᭷
ࡍࡿࡇࢆ᫂ࡽࡋࡓ㸬
2. ୖୗ㌴㍈ື1ḟ㉳ᅉࡍࡿࢱࣖ࿘᪉ྥ1ḟࣔ
࣮ࢻࡀᅇ㌿ຠᯝ㸪᥋ᆅࡼࡿቃ⏺᮲௳ࡢᙳ㡪ࢆཷ
ࡅ࡞࠸ࡇࢆᇶ㸪㌿ືࢱࣖ1⮬⏤ᗘࣔࢹࣝ
ࢆᵓ⠏ࡋࡓ㸬ࡇࡢࣔࢹࣝࣃ࣓࣮ࣛࢱ࡛࠶ࡿᅛ᭷
ືᩘཬࡧῶ⾶ẚࡣ㌴㍈ື1ḟඹࡼࡾྠᐃ࡛ࡁ
ࡿ㸬
3. ᵓ⠏ࡋࡓ1⮬⏤ᗘࣔࢹࣝᐇ ㌴㍈ືࡼࡾධຊ
ࢆྠᐃࡋࡓ㸬ྠᐃࡋࡓධຊࢆࡶ㌿ື㏿ᗘ㸪✺
㉳㧗ࡉ㐪࠸࠾ࡅࡿධຊࢆ᥎ᐃࡋ㸪㌴㍈ືࢆண
ࡋࡓ㸬㌴㍈ືࡢᐇ㦂್ண ್ࢆẚ㍑ࡋ㸪ᮏ ᡭἲࡢጇᙜᛶࢆ♧ࡋࡓ㸬
ᮏ◊✲࠾࠸࡚ࡣᮾὒࢦ࣒ᕤᴗ㸦ᰴ㸧ᢸᙜㅖẶࡼࡾ
㈗㔜࡞◊✲ࢹ࣮ࢱࢆᥦ౪ࡋ࡚࠸ࡓࡔ࠸ࡓ㸬ࡇࡇグࡋ
࡚ㅰពࢆ⾲ࡍ㸬
ཧ⪃ᩥ⊩
1) ᯇᒸஂ⚈㸪͆ᐃᖖἼ㞳ᩓࢱࣖࣔࢹࣝࡼࡿࣟ
࣮ࢻࣀࢬゎᯒ͇㸪᪥ᮏ㡢㡪Ꮫㄅ㸪66(5)㸪245- 250㸪(2010)㸬
2) ᆏ⏣ဴᚰ㸪᳃ᮧᏹ᫂㸪ฟ⚽ᖾ㸪࣮͆ࣟࢻࣀࢬ
ཬࡰࡍࢱࣖ✵Ὕඹ㬆ࡢᙳ㡪ࡘ࠸࡚͇㸪⮬ື
㌴ᢏ⾡Ꮫ⾡ㅮ₇๓ๅ㞟㸪No.881㸪45-48㸪 (1988)㸬
3) ᰘ⏣ᓫ㸪ᒣෆ♸ྖ㸪㙊⏣ᐉ㸪Ⳣཎಇᙪ㸪ᑠ▼ṇ 㝯㸪ụ⏣ಇஅ㸪࣮͆ࣟࢻࣀࢬධຊࡢࣔࢹࣝᡭ ἲࡢᥦண ゎᯒ⢭ᗘࡢ᳨ド͇㸪⮬ື㌴ᢏ⾡
Ꮫ⾡ㅮ₇๓ๅ㞟㸪No.81-02㸪1-4㸪(2002)㸬
4) ᒣ⏣ⱥྐ㸪▼ᕝಟ㸪⏕ἑ῟㸪ᑠᕝᏹ㸪࣮͆ࣟ
ࢻࣀࢬண ᡭἲࡢ㛤Ⓨ͇㸪⮬ື㌴ᢏ⾡Ꮫ⾡ㅮ
₇๓ๅ㞟㸪No.65-00㸪1-4㸪(2000)㸬
5) M. Matsubara㸪T. Koizumi㸪N. Tsujiuchi㸪F. Nakamura㸪 K. Matsuyama㸪͆Identification of Tire Equivalent Stiffness for Prediction of Vertical Spindle Force͇㸪APAC-16㸪 Paper No.2011-28-0093㸪(2011)㸬
6) ᑠἨᏕஅ㸪㎷ෆఙዲ㸪ᯇཎ┿ᕫ㸪ᯇᒣᖾྖ㸪┦ᕝ ᑗ㝯㸪ᓥ⿱Ꮚ㸪͆ᅇ㌿ຠᯝ╔┠ࡋࡓࢱࣖ
ືᣲືゎᯒ͇㸪᪥ᮏᶵᲔᏛㄽᩥ㞟 C⦅㸪77㸪 (777)㸪2018-2029㸪(2011)㸬
7) ୰ᕝ༤㈗㸪ᑠἨᏕஅ㸪㎷ෆఙዲ㸪᳃ཱྀ㔠ஓ㸪͆3㍈ ຊぬࢭࣥࢧࢆ⏝࠸ࡓࢱࣖ㌿ືࡢ㊰㠃ධຊゎ ᯒ͇㸪⮬ື㌴ᢏ⾡Ꮫ⾡ㅮ₇๓ๅ㞟㸪No.123-07㸪 (2007)㸬
8) 㬗ῲኸ㸪ᑠἨᏕஅ㸪㎷ෆఙዲ㸪ᓥ୍㑻㸪͆㌿ື
ࢱࣖື㛵ࡍࡿ◊✲͇㸪⮬ື㌴ᢏ⾡Ꮫ⾡ㅮ
₇๓ๅ㞟㸪No.101-04㸪15-18㸪(2004)㸬