47
ニ ュー ラル ネ ッ トワー ク に よる滑走 艇 の実 用 的抵 抗 推 定 法
一Series62デ
ー
一タ の 汎 化 学 習 とそ の 応 用 シ ス テ ム ー
正員
松
村
竹
実*正
員
大
庭
直
樹*
A Practical Estimation Method of Resistance for Planing Hull with Artificial Neural Networks - Generalization of the data for Systematic Series 62 and its Application System
-by Taketsune Matsumura, Member Naoki Ohba, Member
Summary
This paper proposes a practical design system for the resistance estimation of high
speed mono-hull craft. It uses regressive approach with artificial neural networks, which
learn the teaching sample data of many pairs of input/output vectors, generalize it, and
establish the nonlinear mapping relation between its i/o.
The system consists of a tank test database, mapping neural networks, and a descriptive
neural network. The tank test database is based on the Series 62 which has 1725 data records.
The input of the Mapping neural networks is a set of speed, length, chine breadth, weight,
and center of gravity position. While, its output is a set of residuary resistance, running
trim, rise of center of gravity, and wetted surface. The descriptive neural network denotes
the density of the tank test data. It indicates the designer how reliable the estimation is.
The learning process of these artificial neural networks is based on back propagation
method. The proposed system is easily implemented into the spreadsheet software, very easy
to use, and has the practical accuracy, if the learning of the networks is once established.
1.は じめ に
1.1高
速滑走艇の初期計画
沿岸用漁業 取締 船や巡視船等に代表 され る小 中型 の高
速 業務艇 において は、 部分的な変更が容易 に全 体に波及
*三 井造船㈱ 船舶閲麟1業本部 基本設計部 原 稿 受理 平 成16年10月15日す る。 そのた め、諸性 能のバ ランスが崩れやす く、初期
計画 にお けるデザイ ンスパイ ラルの収 束が難 しい1)。
特 に高速滑走艇 の場 合、重量重心位置 が抵抗特 性に強
く影響 を及 ぼすた め2)、 初期計画の段階か ら主要 目、配
置、 重量、 重心\ 諸性能(復 原性能、 耐航性能 、速力性
・
能)の 検討 を渾 然一体 とな っ て進 める必要があ る
。従 っ
て、船速 、要 目、重量 、重心 か らなる入力ベ ク トル と、抵
抗や 姿勢1青
報か らな る出力ベ ク トル との間の写像 関係 を
把握 してお くことは初期計画 において非 常に有益 となる。
然 るに、 近年 の軽 量大 出力 主機 関お よび ウォ ー・
ター
48 日本 造 船学 会 論 文 集 第196号
ジェッ ト推進 を採 用 した高速艇 では、速力 も実績範疇 を
超 えた滑走域 に及 んでお り、従来 の計画手法 や推定 図表
で は上述 の写像 関係 が捉 え きれ な い場 合が多 い。 写像
関係 に現れ る多次 元パ ラメー タを統一 的に扱 える ライ ト
CAEツ
ール3)が 新たに望まれ てい る。
1.2ニ
ュー ラルネ ッ トワー クの導入
この よ うな写 像 関係(Fig.1参 照)を 捉 える試 み と し
て、池 田等4)5)は 一連 の完全拘束模型に よる3分 力計測
試 験 を実施 し、 その計測結果 を流体力デ ータベース とし
て用いたシ ミュ レーシ ョン法 を提案 してい る。 た だ し計
測精度、 取得情報 量、簡便 さの点で現実的 にはやや難 し
い面 もあるこ とが指摘 され ている6)。
一方
、既存 の多数 の 自由曳航模型試験 や実船試運転 の
結果 を流用 して回帰的 に近似 ・補 間モデル を導 くことも
考え られ る。 ただ し従来 のチ ャー トや統計回帰式 に基づ
いた近似 ・補間モ デル7)8)は 、 多次元ベ ク トル 間の非
線 形写像 には不 向きであ り、 しか も既存 デー タ(推 定用
バ ックデー タ)の 存在領域 を簡 明に示唆 ・更新で きない
難 点がある9)。
これ らの難 点に対処す る新 しいモデル として、著者等
は以前 より階層型 ニ ュー ラルネ ッ トワー ク10)の 導入 を
提案 してきた。 ニ ュー ラルネ ッ トワー クは多数の入 出力
ベ ク トルのペア群 を教示デー タ とみな し、 それ らの入 出
力間 に非線型な写像 関係 を構築す る技 術で ある。既 に高
速艇の推進性能計画11)、 高速船の造波抵抗推定12)、 お
よび横切 面積 曲線最適化13)へ の応用 が試み られてお り、
それぞれ 良好な成 果が得 られ てい る。
本 論では、滑走 艇の抵抗推定 に本技術 を導入 す ること
を試み 、適切なネ ッ トワー ク構造お よびネ ッ トワー ク構
築法 を提案 す』
る。 なお、教示 データにはFig.1に 示す各
要素が広範 囲かつ詳 細に調査 されたSeries622)の
自由
曳航試験結果 を採用 し、 これ を利用 した単胴 滑走艇の実
用的抵抗推定システムを提 案する。
2.ニ ュ ー ロ型推 定 シス テ ム 2.1シ ス テ ム 構 成概 要 .本 論 で 提 案 す るニ ュ ー ロ型 抵 抗 推 定 シ ス テ ム はFig.2 に示 す よ うに 、(1)既 存 情 報 を 離 散 的 に蓄 積 す る デ ー タ ベ ー ス部(Database)、(2)既 存 情 報 の 写 像 関係 を 学 習 した推 定ネ ッ ト部(EstimatingNets)、(3)既 存'皆報の 密 度 分 布 を 学 習 した 随 伴 ネ ッ ト部(DescriptiveNet)、 の 大 き く3つ の部 分 か ら構 成 され る。データベース部 は個 々の船型デー タと水槽試験結果が
離散的 に蓄積 された ものであ る。1隻1状
態 に対応 した
情報がひ とつ のデ ータ レコー ドを構成 し、 教示デー タの
入 出力ベク トルのペアに対応す る。
推 定ネ ッ ト部はデー タバ ンク部 に蓄積 され た水槽 試験
結剰 青報を学習 したニ コ.一
ラルネ ッ トワークである。 本
論では船速 、要 目、重量 、重心 か らなる入力ベ ク トル と、
走航姿勢、 浸水面積 、抵抗 か らな る出力ベ ク トル との 間
に存在す るベ ク トル写像 関係 を学習 させ る。 学習が施 さ
れ た推定ネ ッ トが回帰推定 の中核 を担 う。
入力ベ ク トルが η次元 の場合、1隻1状
態 に対応 した
既存の水槽試験結果(教 示学習点)は η 次元超空間 中の
1点 で表 され ることになる。 推 定対象 とな る計画 点 も1
点で表 され ることになる。 随伴ネ ッ ト14)は この π次元
超空間 におけ る教示学習 点の擬似 的密 度分布 を0∼1の
範囲で示す。 随伴ネ ッ トの 出力値が高 くな る入力領域は
学習点の密度が高 く、計画点 と類似 の既存 情報 が豊富に
存在するこ とを意味する。
2.2学
習データ
高速 滑走艇 の場 合、船速 に応 じて航 走姿勢や浸水面積
が著 しく変化す る。 この種の姿勢変化情報 が詳細 に調 査
Fig. 1 JMapping Relations between the Parameters for Resistance Char-acteristics of Planing Hull forms
ニ ュー ラ ル ネ ッ トワー ク に よ る滑走 艇 の実 用 的 抵抗 推 定 法 49 され た 教 示 デ ー タ と して 、 本 論 で はSeries622)を 採 用 す る。 Fig.3に 示す よ うに、Series62の 船 型 は 、 船 尾 滑 走 面 に ヒネ リの な い モ ノヘ ドロ ン ス タ ー ン を採 用 して お り、 従 来 の ヒネ リ(ワ ー プ)の あ る オ メ ガ船 型15)と は異 な る。 相 対 的 に 船 尾 キ ール の没 水度 が深 く、 船 尾 デ ッ ドラ イ ズ角 も比 較 的 大 き い の で、 保 針性 に優 れ16)、 通 常舵 を 装備 しな い ウ ォ ー ター ジ ェッ ト推 進 艇 に は有 効 な雛型 船 型 シ リー ズ に な る と思 われ る。 特 にイ ン レ ッ トダ ク トま で ユ ニ ッ ト化 され た タイ プ の ウ ォ ー ター ジ ェッ ト推 進 器 を採 用 す る場 合に は 、 工 作 面 で も非 常 に メ リ ッ トの あ る 船 型 で あ り、 耐 航性 等 を 考 慮 して 船 首 を コ ンケ イ ブ(凹 面)に す れ ば 業務 艇 の実 用 船 型 に な る と考 え られ る。
水槽試験データは長 さ幅比L/Bの
異 なる5隻 のモデ
ル の 自由曳航模型 試験 群に基づ き、様 々 な状態(総 計85
状態)に 対応 した抵抗、 姿勢変化 、浸水面積変化等 が詳
細 に計測 され ている。Series62モ
デル の特徴 を以下 に
記す。
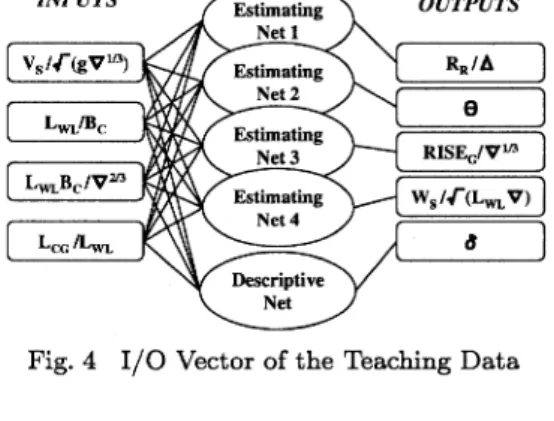
● チ ャイ ン長 さ幅 比.Lp/.Bp .xは2∼7ま での5種 ● トラ ンサ ム 後 端 で のデ ッ ドライ ズ は約12.5度 ● チ ャ イ ン 幅 は船 尾 端 で 最大 幅 の約65% ● 船 尾 滑 走面 は ヒネ リの無 い モ ノヘ ドロン形 状 ● 船 首 滑 走 面 は コンベ ッ クス(凸 面)形 状 水 槽 試 験 は 重 量 お よび 重 心 位 置 を 変 更 した総 計5×17= 85の 静 止 姿 勢 状 態 で 行 な われ 、 船 速 脇 に 応 じた 抵 抗 RT、 浸 水 面 積8w、 トリム変 化 θ 、 重 心 上 昇RσG 等 が 計測 され て い る。 単 胴 高 速 滑 走艇 の場 合、(1)長 さ幅 比 、(2)船 体 サイ ズ 重 量 比 、(3)重 心位 置 の3つ が抵 抗 に影 響 を強 く与 え る パ ラ メー タ と して挙 げ られ て い る2)。 本 論 で も これ に倣 い 、Fig.4に 示 す パ ラ メー タを 学習 教 示 デ ー タの入 出力 ベ ク トル 要 素 とす る。 こ こに 、長 さ 五WLと 幅Bσ はそ れ ぞれ 静 止 時水 線 長 とチ ャ イ ン最 大 幅 を表 し、 艇 体 サ イ ズ は長 さ と幅 の積 で 代 表 させ て い る。 ま た 、 剰 余 抵 抗RR に は走 行 中の 浸 水 面積W:5に 基 づ い た 実験 解析 に基 づ く 値 を採 用 して い る。 教 示 デ ー タ の入 出 力 ペ ア と して は 総 数1725組 に上 る。 これ よ り入 力 ベ ク トル は4次 元 で構 成 され る こ とに な り、Fig.5に 示 す よ うに 、4次 元 パ ラ メ ー タ超 空 間 中 に 1725点 の 水 槽 試 験 点 が 散 在 す る こ とに な る。 な お 、 随 伴 ネ ッ トの 教 示 デ ー タ にお け る水 槽 試 験 点の 密 度 出力 値 δ は0.9と してい る。 2.3ニ ュ ー ラ ル ネ ッ トと教 示 学 習 推 定ネ ッ トと随 伴 ネ ッ トの具 体 的 な構 造 は3層 構 造 と し、 中間 層 の ニ コ.一ロ ン数 は どの ネ ッ トで も7と して い Fig. 3 iBody Plan of Series 62 Model Fig. 4
I/O Vector of the Teaching Data
Fig. 5 Concept of Four-Dimensional De-sign Parameter Space
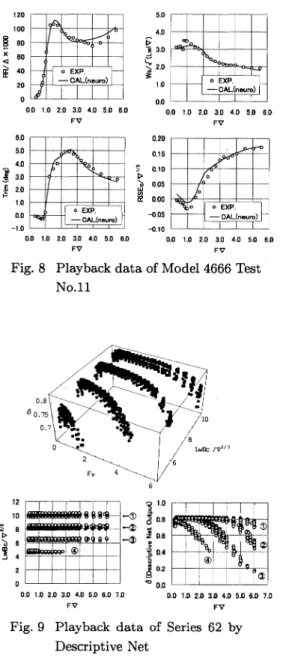
50 日本 造 船 学 会論 文 集 第196号 る。Fig.6にFig.4に 対 応 した 具 体 的 な ネ ッ トワ ー ク構 造 を示 す 。 先 述 の4次 元 パ ラ メ ー タ超 空 間 中 に散 在 す る1725点 の 水 槽 試 験 点 を基 に 、4つ の推 定 ネ ッ トと1つ の 随 伴 ネ ッ トを教 示 学 習 す る。 推 定 ネ ッ トの 学 習 は通 常 の 誤 差 逆 伝 播 法10)に よ り行 う。 学 習 回数1725points×50,000stepsの とき の教 示 デ ー タ と再 現 推定 値(Playbackdata)の 比 較 をFig.7 に示 す 。 相 関係 数 は0.962∼0.988と な っ て い る。 構 築 され た 推 定 ネ ッ トに よ り、 教 示 デ ー タ を 再 現 推 定 した結 果 の 一 例 をFig.8に 示 す 。 対象 はSeries62モ デ ル 番 号4666、 試 験 番 号10に 相 当 す る実 験 デ ー タ2) で あ る。 推 定 曲線 は 全 体 的 に平 滑 化 され て い るが 、 実験 デ ー タ の ハ ン プ ホ ロー の 傾 向 は適 切 に 捉 え られ て い る の が解 る。 一 方、 随伴 ネ ッ トに は 入 力パ ラ メ ー タ空 間 に お け る 学 習 点 の"密 度"を 出 力 させ る。 これ は 空 間 分 割 に類 似 し た非 線 形 性の 強 い 写 像 関 係 で 、 そ の 教 示 に は多 少 の 工夫 を要 す る。 まず 、 学 習 デ ー タ は以 下 の2種 類 の集 合 で構 成 す る。 1.推 定 ネ ッ トの 学 習 に用 い たZ個 の 学 習 点 に対 応 す る集 合 で、 そ の要 素 は4つ の入 カ パ ラ メー タ座 標 値 と出 力 値 δ・=0.9の 組 で あ る。 これ を学 習 点 集 合 丁乞 とす る。 2.入 力 パ ラ メー タ空 間 中に一 様 ラ ン ダム に分布 した η 個 の座 標 点 に対 応 す る集 合 で 、 そ の 要 素 は4つ の入 力 パ ラメー タ座 標 値 と出力 値 δ=0.1の 組 で あ る。 これ をバ ッ クグ ラ ウン ド集 合 恥 とす る。
以上、2つ の集合 を混ぜ た学習デー タを随伴ネ ッ トに教
示 す る。 学 習 計 算 の 際 に は 職 の 要 素 を ラ ン ダ ム に 変 化 させ る。 す なわ ち 、 η 個 の 要 素 点 の 座 標 値 を 学 習 の1step 毎 に一 様 乱 数 に て 生成 す る。 但 し、 高 次 元 空 間 を対 象 と す る場 合 、 線 形 合 同法 に よ る乱 数 生 成 だ と系 列 相 関 が生 じて 空 間 を埋 め尽 くせ な い 恐 れ が あ る17)。 そ こで 本 論 で は最 小 乱 数 生 成 法 に切 り混 ぜ アル ゴ リズ ム を併 用 した 手 法17)を 用 い る こ とにす る。 これ に よ り随 伴 ネ ッ トは 学 習 点 の 擬 似 的 な密 度 を 出力 す る よ うに な る。 こ こ で は1725点 の 学 習 点集 合 既 に 対 し、 同 様 に 1725点 の バ ック グ ラ ウ ン ド集合 職 を用 意 し、(1725十 1725)pointsx50,000stepsに 及 ぶ 学 習 計 算 を 実 施 した。 教 示 デ ー タ は本 来4次 元 超 空 間 を 占め るが 、Fig.9に 示 す よ うに 馬 と 五wBσ/▽2/3の2次 元 平 面 にそ の 分 布 を投 影 す る と、 高速 域 で船 体 サ イ ズ が 小 さ く重 量 の 重 い 領 域 で は デ ー タ の密 度 が 低 くな っ て い る の が 解 る。 学 習 済 み の随 伴 ネ ッ トに よ る プ レイ バ ッ ク推 定値 を 同 図 に併 せ て掲 げ て い るが 、 随 伴 ネ ッ トは的 確 に こ の傾 向 を 捉 え てい るの が示 され て い る。 3.他 船 型 へ の 適 用 例 3.1抵 抗 推 定 例 先 述 の よ うにSerie言62は コ ンベ ッ ク スバ ウ、 モ ノヘ ドロ ンス タ ー ンだ が 、 業 務 艇 で は 耐 航 性 等 を考 慮 して 、 Fig. 6 Structure of NeuralProposed System
Networks in
Fig. 7 Comparisons between the Teach-ing data and the Playback data of the Estimating Nets
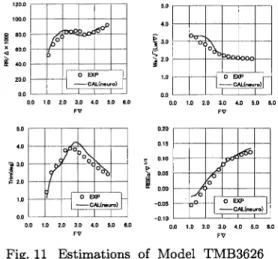
ニ ュ ー ラル ネ ッ トワー ク に よる滑 走 艇 の 実用 的 抵 抗 推定 法 51 船 首 は コン ケイ ブ(凹 面)に され る こ とが 多 く、 船 尾 形 状 もオ メガ タイ プ が ま だ主 流 とい え る。 こ こ で は こ の よ うな 船 型 と して 、SNAMESmall CraftDataSheets18)に 掲 載 され て い るNo.7船 型 (TMB3626)とNo.8船 型(TMB3941)を 取 り上 げ 、 構 築 され た ネ ッ トに よ る他 船 型 の 抵 抗 推 定 の応 用 可 能 性 を検 証 して み る。Fig.10に 両 者 の 正 面 線 図 を 、Table1 に 主 要 目比 等 を 示 す 。 双 方 と も 随 伴 ネ ッ ト出 力 値 δが 0.7以 上 に及 ぶ も の で あ り、 参 考 と な る水 槽 試 験 デ ー タ が比 較 的 充 実 して い る こ とが 示 され てい る。 No.7船 型 を 対 象 に実 験 結果 と構 築 され たネ ッ トに よ
る推定結果 をFig.11に 、No.8船 型 を対象 にした結果 を
Fig.12に 示す。 抵抗、浸:水
面積、 トリム、重 心上昇量の
全て に渡 っ て、概ね 良好 な推定精度 を実現 してい ること
が解 る。
一般 に
、排水容積 フルー ド数 が3以 上にも及ぶ滑走域
で は、 重心位置は後方 の方 が抵抗 的には望ま しい ことが
多 く、 ニ ュー ロによる推定結果では両者の違いにその傾
向が現れてい る。 しか しNo.8船 型 の実験 結果 では滑走
速力域で推定結果 と若干 の乖離 があ り、浮上率 が推 定ほ
ど大 きくな く、それ に呼応 して浸水面積や剰余抵抗 の減
Fig. 8 Playback data of Model 4666 Test No.11
Fig. 9 Playback data Descriptive Net
of Series 62 by
Fig. 10 Body Plans of No.7 & No.8 Model
Table 1 Main Specifications of No.7 & No.8 Model
52 日本 造 船 学会 論 文 集 第196号
少 率 も低い。No.8船 型 の よ うなオメガ船尾形 状は滑走
域 での滑走効 率がモ ノヘ ドロン船尾形状 と比較 してやや
悪い ことが予想 され る。
3.2他
推定法 との比較
滑走 高速艇 の抵抗推 定法 として世界的 に広 く利用 され
てい るものに、Savitsky19)の 手法が ある。 準理論 的な
アプローチに より数 式 とチ ャー トを組み合 わせ た推 定法
であ り、 プ レジ ャーボー ト等 の設 計に広 く利用 され てい
る。 全抵抗 の他 に姿勢変化 も推定で きる点 で機能 的には
本 手法に類似す るが、 実質的には 中低速域の推定 に制 限
がある。
Fig.13に 先 述 の モ デ ル2種 を対 象 にSavitskyに よ る手 法 と本 手 法(ニ ュ ー ロ)に よ るモ デ ル 全 抵 抗 の 推 定 結 果 の 比 較 を示 す 。No.8船 型 の高 速 滑 走 域 で は先 述 の 理 由 に よ り実 験 値 と推 定 値 に若 干 の 乖 離 が 見 られ る が 、 ニ ュ.一ロに よる 手 法 は 低 速域 か ら高 速 域 に か けて 全 体 的 に実 験値 と良好 な一 致 を示 して い る。 No.7TMB3626No.8TMB3941 2020 魅.魅重15重15 む り 923 10510 切 切 朋」 艦oO o α:o: ・85し ・85 垂 垂 00 0.02.55.07.510.00.02.55.07.510n ModelSpoodVm(m/s)鰯odelSpeodVm(rn/s) Fig.13ResistanceEstimationsofModel TMB3626(No.7)andTMB3941 (No.8)byProposedSystema:nd Savitsky,sMethod実際に業務艇 に採用 され る船型 は、耐航性や横 安定性
の観 点か らSeries62船
型 よ りも船首船央デ ッ ドライ ズ
角 が高 く、船尾チ ャイ ン幅の広い船型 になることが多い。
これ は滑走効率 の低減 を意味 し、Series62船 型 よ りも
中低速域 で抵 抗が低 く高速滑走域 で抵抗 が高 くなる傾 向
を意味す る。
この よ うな船型差 に基 づ く影 響は排 水容積 フルー ド数
の関数 として表現 でき る。 例 えば、雛形船型 の実験 結果
を表 すベ ク トル ブe叩 が1つ あれ ば
本推 定 システ ム
に よる推 定結果ベ ク トル τ♪cα
εとの相 関が排水 容積 フ
ルー ド数の関数Q(馬)と
して取得できる。
舞
一Q(馬)
(1)
このよ うな関数 を1つ 取得 しておけば、タイプシ ップ船
型 毎に、要 目変化、 重量重心変化 の影響 を簡便 に推定 で
きることにな る。
4.結 論 本 研 究 で はSeries62の デ ー タ を一 連 の ニ ュ ー ラル ネ ッ トワー ク に汎 化 学 習 させ 、 船 速 、 要 目、 重 量 、 重 心 か らな る入 力 ベ ク トル と、 走 航 姿i勢、 浸 水 面積 、 抵 抗 か らな る 出 力 ベ ク トル と の 間 に 陽 なベ ク トル 写 像 関係 を構 築 す る こ と を試 み た 。 ま た 、Series62の 擬 似 的 な デ ー タ密 度 を示 す 陽 関数 を 、 同 じ くニ ュ ー ラル ネ ッ トワー ク を用 い て構 築 す る こ とを試 み た。 そ して 、Series62と Fig. 11Estimations of Model TMB3626
(No.7) by Proposed System
Fig. 12
Estimations of Model TMB3941
(No.8) by Proposed System
ニ ュー ラル ネ ッ トワー クに よ る滑 走 艇 の実 用 的 抵 抗推 定 法 53
は異 なる実用船型設計へ の応用 が、 どの程度可能 か検討
してみた。
その結果、 以下の諸点が判明 した。
● 推定 ネ ッ トの学習結 果 は非 常 に良好 で、剰 余抵
抗、浸水面積、 走行 トリム、重心艀 上量の どの項
目に関 して もプ レイバ ック推 定値 と教示 データ と
の一致度 は良好である。
● 随 伴ネ ッ トは、 学習 点 集 合 とバ ッ ク グ ラ ウン ド集 合 を混 ぜ た 教 示 デ ー タ を学 習 させ る こ とに よ り、 的確 にSeries62の 分布 密 度 を 再現 す る こ とが で き る。 これ よ り、 推 定 に 際 してバ ッ クデ ー タ が ど れ 程 充 実 して い る領 域 か 容 易 に 把 握 す る こ とが で き る。● 推 定ネ ッ トと随伴ネ ッ トの出力の組み合 わせ によ
り、計画点 に対す る標準性能 と実績分布密度が得
られる。 これ よ り船型の優劣判断や開発必要度の
判 断がで きる。
ニ ュー ラルネ ッ トワー クは人工知能 との関連 で論 じら
れ るこ とが多 いが、本研究 にお ける認識 は、 知能 とい う
よ りもむ しろ非線型超 空間補 間法の一種 であ る。 それは
極 めて単純 だが非線型 な振 る舞い を行 う小 さな素子 が多
数寄 り集 まっ たものであ り、 これ らの非線型素子が相 互
に連絡す る と、全体 としては思 い もかけず便利 な振 る舞
い を示す とい う具合である。
本論 ではシ リーズの実験 デー タを対象 としたが、CFD
等の一連 の重い計算結果 を学習 させ る ことで も、 同様 な
応用が考え られ、今後、様々 な展 開が期待 され る。但 し、
その場合で も本論で示 したデータベース部 、推定ネ ッ ト
部、および随伴ネ ッ ト部 か らなる骨格は不変 と考 えられ、
普遍 性のあるシステム構成 と考 えられ る。
謝
辞
本論文 の作成 に際 しては、東京大学生産技術 研究所 の
浦環教授 による御指導 を頂い た。 ここに感謝 の意 を表す
る次第 である。
参 考 文 献
● 対 象船型 がSeries62と
異 な る船 型 で も、 中高
速域 か ら滑走域 に至るまで幅広い速カ レンジに渡
り、十分実用 的な推定精度 を有す ることが判 明 し
た。 この点は適用範 囲が限定 され る従来のチ ャー
トや推 定法 と比べ て本 手法 が優れ て い る と言 え
る。 但 し、F▽>3.0に
お よぶ滑走域 では船型差
が有意 な推 定誤差 にな り得 るので、船型毎 に相 関
関数 を把握 してお くこ とが望ま しい。
● 従 来のオメガ船尾 形状 はモ ノヘ ドロン船尾形状 と
比較 して滑走域 で適切 な走行姿勢が得 られず 、滑
走効率がやや劣 り、抵抗増 になる可能 性がある。
● 実際 に、漁 業取締 艇 の船 型設 計 に本 システ ム を
適 用 した ところ、初期計画の段階か ら重量重・
酎立
置影響 を把握 できた他 、走行姿勢1青
報 も推定で き
るこ とか ら、スプ レー リス トや トリム タブ等の付
加物設計 にも有益 であることが判 明 した。 この点
も従来他手法 と比べて、 本手法が優 れてい る点で
ある。
● 学習計算 自体は複雑な繰 り返 し収 束計算 ステ ップ
を踏む が、一度学習済み のニ ュー ラルネ ッ トは、
表計算 ソフ トの類に も容 易に実装 できるロジ ック
である。 特に、最近の表計算 ソフ トが もつ最適化
検討 機能(ソ ルバー・)を用いれば、非線形計画に
よる最適要 目、 最適 重心位置等 も検討 することが
できる実用性 を有 している。
1)松 村 竹 実:技 術 論 説 「特 殊 船 型 の 基 本 特 徴 と そ の 応 用 」,船 の 科 学,Vol.53(2000-7),pp.58-70 2)Clement,E.P.andBlount,D.L.Resistance TestofaSystematicSeriesofPlaningHull Forms,Tbans.SNAME,Vo1.71(1963),pp.491-579 3)栗 山 利 彦:車 両 最 短 開 発 の 戦 略 ツ ー ル パ ワ ー CAEと ラ イ トCAE,一CAEに よ る 自動 車 の コ ス トダ ウ ン を 目指 して 一,自動 車 技 術 会 シ ン ポ ジ ウム, No.9512(1995),pp.4-10 4)池 田 良穂,他:小 型 高速 艇 に働 く流 体 力 に 関す る研 究,関 西 造船 協 会誌,Vo1.218(1992),PP.111-120 5)横 溝 幸冶,池 田良穂:流 体 力 デ ー タベ ー ス を使 用 し た 高速 艇 の航 走 姿 勢 シ ミ ュ レー シ ョ ン,関 西造 船 協 会 誌,Vo1.218(1992),PP.101-110 6)鳥 野 慶 一,他:高 速 小 型 漁 船 模 型 の 曳 航 実 験 法 に 関 す る 基礎i的研 究,関 西 造 船 協 会 誌,Vol.220(1993), pp.83-95 7)丹 羽 誠 一:高 速 艇工 学,舟 艇 協 会 出版 部(1971) 8)大 隅三 彦,木 原 和 之:/J・ 型 高 速 艇 の 推進 性 能 の推 定 法,西 部 造船 会 会 報,No.75(1987),PP.36-51 9)松 村 竹 実:ニ ュ ー ラル ネ ッ トワ ー ク を利 用 した 船 舶 設 計 手 法,一船 型 初 期 計 画 に 対す る新 しい 回 帰 的 ア プ ロー チ ー,造船冊 究,Vol.31(2000-4),PP.9-18日本 造 船 学会 論 文 集 第196号 54 10)石 川 真 澄:コ ネ ク シ ョ ニ ズ ム と 学 習,認 知 科 学 の 発 展,4(1991),pp.51-77 11)松 村 竹 実,浦 環:ニ ュ ー ラル ネ ッ トワ ー ク を 利 用 し た 中 高 速 艇 の 速 力 性 能 初 期 推 定 ツ ー ル の 構 築,日 本 造 船 学 会 論 文 集,Vol.181(1997),pp.221-232 12)松 村 竹 実,浦 環:ニ ュ ー ラ ル ネ ッ ト ワ ー ク を 利 用 し た 船 型 初 期 計 画(第1報),日 本 造 船 学 会 論 文 集, Vo1.183(1998),pp.91-100 13)松 村 竹 実,浦 環:ニ ュ ー ラ ル ネ ッ ト ワ ー ク を 利 用 し た 船 型 初 期 計 画(第2報),日 本 造 船 学 会 論 文 集, Vo1.184(1998),pp.551-560 14)浦 環,石 井 和 男:ニ ュ ー ラ ル ネ ッ ト形 成 時 の 学 習 領 域 の 記 憶 と 知 識 獲 得,日 本 造 船 学 会 論 文 集, Vo1.171(1992),pp.587-593 15)丹 羽 誠 一:新 高 速 艇 講 座<43>,舟 艇 技 報, No.39(1993),pp.1-13 16)丹 羽 誠 一:新 高 速 艇 講 座<3>,船 舶,Vo1.54 No.594(1981),pp.65-70 17)Press,W.H.,Flannery,B.P.,Teukolsky,S.A., andVetterling,W.T.NumericalRecipesin C,技 術 評 論 社,(1992),pp.307-312 18)SNAME:SMALLCRAFTDATASHEETS, setof16SNAMETechnical&ResearchPub-lications:Datasheets,(1967) 19)Savitsky,D.:HydrodynamicDesignofPlaning HUIIs,MarineTechnology,Vol.lDec.(1964), pp.71-94 Appendix 婦 ・=婦=ω91汁 ん量 雌=∫(nu乞)(η ≧2) ∫(u)=・1/(1+exp(一u))