マイクロ環境発電応用のための極低電力回路技術
道関
隆国
†a)田中
亜実
†宇都宮文靖
††Ultralow-power Circuit Techniques for Applications with Micro-scale Energy
Harvester
Takakuni DOUSEKI
†a), Ami TANAKA
†, and Fumiyasu UTSUNOMIYA
††あらまし マイクロ環境発電応用として,発電電力がナノワット級の環境発電素子を用いて機器の待機電力 を削減する極低電力ノーマリオフセンサスイッチ回路構成を述べる.特に,センサスイッチ回路に必須となる ED-CMOS 極低電力レベル変換回路構成を述べる.また,ノーマリオフセンサスイッチ回路の応用例として,環 境発電素子に赤色LED 光電池を用いた自動センサスイッチ搭載のワイヤレスマウス構成と赤外線 LED 光電池 を用いた赤外線無線ウェイクアップ受信機構成を述べる. キーワード 環境発電,極低電力,ノーマリオフ,ED-CMOS 回路,LED 光電池
1.
ま え が き
あらゆるモノにセンサを取り付けインターネットに 接続することにより新たな価値を創出するIoT (In-ternet of things)社会の実現に向けて,様々な技術レ イヤーの研究開発が盛んに行われている.IoT技術の 今後の問題の一つに,モノをインターネットに接続す るための近距離無線センサ端末の電源問題がある.電 池駆動のセンサ端末は電池交換が必要となるからで ある.端末の電源問題を解決する一つの手法として, 我々の身の回りに微小ながら常に存在する熱,光,振 動といったアンビエントエネルギー源を活用するマイ クロ環境発電技術が注目されている[1]. 発電電力がミリワット級の環境発電応用としては, 照明用スイッチに電磁誘導型の発電素子を組込み,無 線で照明のON/OFF制御を行う無線スイッチ[2]や, 列車の車軸に振動発電素子を組込み,無線で車軸のベ アリングを監視するモニタリングシステム[3]が,既 に実用化されている.我々は,人間の尿で発電する尿 †立命館大学理工学部,草津市Department of Electronic and Computer Engineering, Ritsumeikan University, 1–1–1 Noji-Higashi, Kusatsu-shi, 525–8577 Japan
††セイコーインスツル株式会社半導体事業部,松戸市
Semiconductor Division, Seiko Instsuruments Inc., 563 Takatsuka-Shinden, Matsudo-shi, 270–2222 Japan a) E-mail: [email protected] 発電電池をおむつに組み込み無線で尿漏れを検知する 尿漏れセンサシステムを試作し,その有用性を実証し てきた[4]∼[8].mW級の環境発電応用は,今後,多 くの製品展開が期待できる. 一方,発電電力がマイクロワット級の環境発電応用 は,発電量の制限から電卓や腕時計に限られていた. 我々は,植物の樹液で発電する樹液発電電池を用い, 樹液発電電池の発電電力を,いったん,充電キャパシ タに充電し,充電後に無線機を駆動する間欠駆動方式 の無線機で無線信号を送信するとともに,受信機で送 信信号の信号間隔から植物の健康状態をモニタリング する植物モニタリングシステムを開発し,マイクロ環 境発電素子でもセンサシステムが実現できることを実 証してきた[9], [10].更に,発電電力がナノワット級の 環境発電応用として,パワースイッチトランジスタを 用いて,環境発電の有無により機器の起動及びスリー プ制御を行うノーマリオフセンサスイッチ回路[11]∼ [13]が,機器の待機電力を削減できることを示してき た.ノーマリオフセンサスイッチ回路は,トイレの自 動洗浄,自動ドア,自動点灯/消灯機能付き室内照明等 のセンサ制御による自動システムで,人の検出に常時 必要なセンサ回路の消費電力を削減できる.また,リ モコン制御のテレビ,エアコン,照明機器等の待機電 力を削減できる.昨年,ナノワット級の環境発電素子 として赤色LED光電池を用いたノーマリオフ自動セ ンサスイッチ回路搭載のワイヤレスマウス[14]を実用
ランジスタを駆動する際に必須技術となる極低電力レ ベル変換回路構成を2.で述べる.3.では,環境発電 素子に赤色LED光電池を用いたセンサスイッチ回路 をワイヤレスマウスに適用した場合の回路構成を,4. では,環境発電素子に赤外線LED光電池を用いたセ ンサスイッチ回路を赤外線無線受信機のウェイクアッ プ回路に適用した場合の回路構成を述べる.
2.
マイクロ環境発電を用いたノーマリオ
フセンサスイッチ回路のための極低電力
ED-CMOS
レベル変換回路
環境発電素子の発電の有無により電子機器の起動及 びスリープ制御を行うノーマリオフセンサスイッチ回 路構成を図1に示す.センサスイッチ回路は,マイク ロ環境発電素子,電流駆動型の極低電力レベル変換回 路,及び,パワースイッチトランジスタからなる.環 境発電素子で発電電流が発生すると,レベル変換回路 の入力とグランド端子間に接続した高抵抗素子を介し て,発電電流を発電電圧に変換することで,レベル変 換回路は発電電圧を増幅し,後段のパワースイッチト ランジスタを駆動することで電子機器が起動する.ま た,環境発電素子が発電を停止すると,発電電圧が 0 Vに低下し,極低電力レベル変換回路の出力も0 V となるため,パワースイッチトランジスタはスリープ 状態となり,消費電力をナノワットレベルまで削減で きる.このため,環境発電素子を用いたノーマリオフ 図 1 マイクロ環境発電を用いたノーマリオフセンサス イッチ回路構成Fig. 1 Normally-off sensor switch circuit scheme with micro-scale energy harvester.
回路構成を用いると,CMOSインバータを構成する pMOSFETのサイズ(ゲート長)を大きくしなくては ならず,インバータの入力容量が増加し,環境発電素 子でインバータを駆動する遅延時間が増大する.この ため,単一入力型レベル変換には,nMOSFET駆動 のnMOSインバータ回路構成が有用となる.以下で は,nMOSインバータ回路構成で極低電力化が可能な ED-CMOS [15], [16]レベル変換回路構成を述べる. 2. 1 マイクロワット動作ED-CMOSレベル変換 回路 動作時の消費電力をマイクロワットレベルに抑えた 電流駆動型のED-CMOSレベル変換回路を図2に示 す.レベル変換回路は,ED MOSインバータ[17], [18] とCMOSインバータからなる.ED MOSインバータ は,負荷にゲート・ソース端子を接続したデプレッショ ン型nMOSFETを用い,負荷を定電流源として動作 させるnMOSFET駆動型のインバータであり,抵抗 負荷型インバータに比べて利得を大きくできる.また, 回路の電源電圧が変動しても,負荷が定電流源として 動作するため,他のインバータ構成に比べて論理しき い値電圧変動を抑制でき,電源変動に対してロバスト なレベル変換を行うことができる.図2示す初段の ED MOSインバータの負荷には,デプレッション型 nMOSFETのソースに高抵抗を挿入することにより, デプレッション型nMOSFETのサイズを小さくして, 図 2 マイクロワット動作 ED-CMOS レベル変換回路
Fig. 2 Microwatt-power-level ED-CMOS level con-verter.
図 3 ED-CMOSレベル変換回路の応答特性 Fig. 3 Simulated input and output waveforms of
ED-CMOS level converter.
図 4 光電池の発電特性
Fig. 4 Power generation characteristics of photo-voltaic energy harvester.
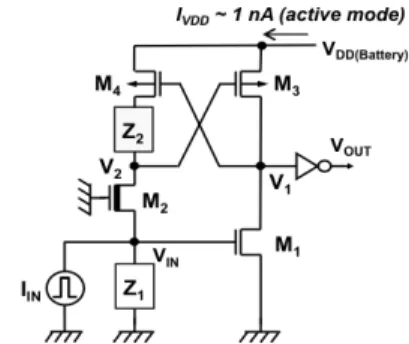
ED MOSインバータの出力の寄生容量を削減した. ED-CMOSレベル変換回路を0.6-µm CMOSプロ セス[5]で試作した場合のシミュレーション波形を図3 に示す.動作時電流1 µAの条件で,入力振幅0.5 V の入力信号を3 Vの信号振幅にレベル変換する場合, ED-CMOSレベル変換回路の遅延時間は0.2 µsと なる. 2. 2 ナノワット動作ED-CMOSレベル変換回路 マイクロ環境発電素子として光電池を用いた場合の 蛍光灯下200 lxでの発電特性を図4に示す.各素子を 従来のフォトセンサとして用いる場合には,各素子に 逆バイアスを印加して使用するため,少なくとも40 ナノアンペア以上の消費電流が必要であり,消費電流 は光量に比例して増大する.一方,素子を光電池とし てセンサスイッチに用いるためには,1ナノアンペア レベルの消費電流を持つレベル変換回路が必要になる. ナ ノ ワット 動 作 の ED-CMOS レ ベ ル 変 換 回 路 [11], [12] を 図5に 示 す.レ ベ ル 変 換 回 路 は ,駆 動 nMOSFET M1,M2,クロスカップル型pMOSFET 負荷M3,M4,高抵抗素子Z1,Z2,及び,CMOSイ ンバータからなる.本レベル変換回路は,駆動トラン ジスタM2にデプレッション型のnMOSFETを用い 図 5 ナノワット動作 ED-CMOS レベル変換回路
Fig. 5 Nanowatt-power-level ED-CMOS level con-verter.
図 6 デプレッション型 nMOSFET の電流電圧特性
Fig. 6 IDS-VGScharacteristics of depletion-type nMOSFET. たことに特徴がある.本レベル変換回路の入力に入力 電流が発生すると,高抵抗素子Z1によりレベル変換 回路の入力電圧VINが上昇し,駆動nMOSFET M1 が導通状態となる.駆動nMOSFET M2は,ゲート・ ソース間電圧が負バイアス状態となるため,図6に 示すようにM2は非導通状態になる.このため,レベ ル変換回路の出力ノードV1,V2は,それぞれ,0 V とVDDレベルとなり,レベル変換回路の出力電圧は VDDレベルとなる.レベル変換回路の消費電流は,駆 動nMOSFET M2 とpMOSFET負荷M3 のリーク 電流で決まる.駆動nMOSFET M2のリーク電流は, ゲート・ソース間電圧の負バイアスが大きくなる赤色 LED光電池(図4参照)を用いることにより,リーク 電流をナノアンペアレベルに抑えることができる.レ ベル変換回路の入力電流が消滅すると,レベル変換回 路の入力電圧は0 Vとなり駆動nMOSFET M1 は非 導通状態となる.このとき,駆動nMOSFET M2の 電流駆動能力はnMOSFET M1 よりも大きくなるの で,レベル変換回路の出力ノードV1,V2は,それぞ
図 7 ED-CMOSレベル変換回路の入力電流に対する消 費電流特性
Fig. 7 Measured current dissipation vs. input current of ED-CMOS level converter.
図 8 ED-CMOSレベル変換回路の過渡特性
Fig. 8 Measured input and output waveforms of ED-CMOS level converter.
れ,VDDレベルと0 Vとなり,レベル変換回路の出力 電圧は0 Vとなる.レベル変換回路の消費電流は,駆 動nMOSFET M1と負荷pMOSFET M4で決まり, リーク電流をnAレベルに抑えることができる. 高抵抗素子にゲート・ソース端子を接続したデプレッ ション型のnMOSFETを用いたED-CMOSレベル 変換回路の入力電流に対する消費電流特性を図7に示 す.出力変化時に18 nAの消費電流が発生するが,動 作時の消費電流を1 nA以下に抑えてレベル変換でき ることがわかる.ED-CMOSレベル変換回路の過渡 応答特性を図8に示す.レベル変換に要する遅延時間 は125 µsである.
3.
ノーマリオフ自動センサスイッチ搭載ワ
イヤレスマウス
光電池としてSi系に比べて安価なGaAs系の赤色 LEDを二つ用いたノーマリオフ自動センサスイッチ 回路を搭載したワイヤレスマウスを図9に示す.マウ スの握り部にLED1を配置し,もう一方のLED2を 常に手で覆われないマウスの先端部に配置することに 図 9 赤色 LED 光電池を用いたノーマリオフ自動センサ スイッチ搭載ワイヤレスマウスの写真Fig. 9 Photograph of wireless mouse that has au-tomatic sensor switch with red LED photo-voltaic energy harvesters.
図 10 赤色 LED 光電池を用いたノーマリオフ自動セン
サスイッチ回路構成
Fig. 10 Circuit diagram of normally-off automatic sensor switch with red LED photovoltaic en-ergy harvester. より,LED1に入射する光が遮光されるかどうかで自 動でマウスの電源をON/OFFできるようにした. LED光電池を用いたノーマリオフ自動センサスイッ チ回路構成[19]を図10に示す.自動スイッチ回路は, 二つのLED光電池に接続したカレントミラー回路, ナノワット動作ED-CMOSレベル変換回路,パワー スイッチ回路,及び,暗所での起動用自動スリープ 回路からなる.ED-CMOSレベル変換回路の高抵抗 素子としては,ゲートとソースを接続したデプレッ ション型のnMOSFETを用いた.先ず,明所での動 作を説明する.マウスを使用しない待機時には,LED2 に接続したカレントミラー回路のnMOSFET M6の チャネル幅をLED1に接続したカレントミラー回路 のnMOSFET M5のチャネル幅より大きく設定して おくことにより,発電電流をグランド側に流すことで, ED-CMOSレベル変換回路への入力電流を遮断して パワースイッチトランジスタが“OFF”状態となるよ
図 11 明所での自動スイッチのシミュレーション動作波形 Fig. 11 Simulated waveforms of automatic switch in
bright place. うにした.マウスを握る動作時には,LED1での発電 が遮断されるので,LED2 の発電電流がED-CMOS レベル変換回路に流れ,パワースイッチトランジスタ が“ON”状態になるようにした.明所での自動スイッ チ回路のシミュレーション波形を図11に示す. LED2のみ発電するとpMOSFET型のパワースイッ チトランジスタを導通してマウスをON状態にできる ことがわかる. 次に,暗所での動作を説明する.暗所ではLED2で の発電がなくなるため自動スイッチ機能は停止する. プレゼンテーション会場での暗所での動作も保証する ため,1クリック動作は必要となるが,暗所でも動作可 能な自動スリープ回路[6]をスイッチ回路に付加した. 自動スリープ回路は,タクタイルスイッチ(SW),充 電キャパシタ(C),二つのツェナーダイオード(ZD1, ZD2),及び,高抵抗(R1)の五つのディスクリート部 品からなる.先ず,1クリック動作によりSWが押さ れると,ZD1,R1を介してレベル変換回路の高抵抗 トランジスタM7に電流が流れ,レベル変換回路の入 力電圧VINが上昇する.入力電圧VINが上昇すると レベル変換回路を介してパワースイッチトランジスタ が導通する.その後,SWが開放されると充電キャパ シタ(C)から高抵抗素子M7 に放電を開始する.レ ベル変換回路の入力電圧VINがレベル変換回路の駆 動トランジスタM1のしきい値電圧以下まで低下する と,レベル変換回路を介してパワースイッチトランジ スタが非導通状態となり自動的にスリープ状態に入る. マウスの1クリック後の動作時間は,充電キャパシタ の放電時間で決まり,放電時間は充電キャパシタと高 抵抗トランジスタM7のRC時定数で決まる.光電池 LED2とSWの間に挿入した高抵抗R1は,充電キャ パシタからLED2 に流れる放電電流を抑えて,充電 図 12 暗所での自動センサスイッチ回路のシミュレーショ ン動作波形
Fig. 12 Simulated waveforms of automatic sensor switch in dark place.
キャパシタからの放電時間の損失がないようにした. また,ZD2は充電キャパシタとチャージポンプ回路を 構成し,マウスのモーション信号により充電キャパシ タの放電時間の延命を行った.充電キャパシタ(C)の 容量値を100 nF,R1= 1 MΩとした場合の暗所での 自動センサスイッチ回路のシミュレーション動作波形 を図12に示す.モーション信号がない場合には,ス イッチ動作後,107秒間動作状態となり,その後に自 動的にスリープ状態に入ることがわかる.モーション 信号を用いた場合には,35秒間の様々なモーション 信号に対して,動作時間を40秒延命できることがわ かる.
4.
赤外線無線ノーマリオフウェイクアップ
受信機
市販リモコンからの赤外線を常時点灯照射した場合 の赤外線(IR) LEDの発電特性を図13に,室内光下 での発電特性を図14に示す.リモコンからの赤外線 照射による発電電流は1 nA以下と小さく,室内光下 での発電電流に比べて小さくなることがわかる. IR LED光電池を用いて,リモコンからの赤外線パ ルス信号で受信機を起動させるためには,室内光によ る発電電圧の上昇を抑えて,赤外線の光パルス信号に よる急激な光強度変化をLEDの発電変化で検出する ことが必要となる.ピコワット動作の光パルス検出回 路[13]を図15に示す.光パルス検出回路は,IR LED 光電池,立ち上がりエッジ検出回路,及び,DC電圧図 13 市販リモコンからの赤外線照射による赤外 LED の 発電特性
Fig. 13 Power generation characteristics of IR LED for light source of commercial IR remote con-troller.
図 14 蛍光灯下における赤外 LED の発電特性
Fig. 14 Power generation characteristics of IR LED under fluorescent light.
図 15 赤外 LED を用いたピコワット動作光パルス検出
回路構成
Fig. 15 Picowatt-power-level ultralow-power light pulse detector with IR LED.
リミッタ回路からなる.立ち上がりエッジ検出回路は, 一方の入力を直接LED光電池に,もう一方をRC遅 延素子を介してLEDに接続したカレントミラー型の 差動増幅回路からなる.立ち上がりエッジ検出回路の 動作原理を図16に示す.LED発電電圧の立ち上がり が急しゅんになるほどRC遅延素子により差動増幅回 路の入力振幅が大きくなるので,立ち上がりエッジ検 出を行う発電電圧の立ち上がり速度の判定基準は,差 動増幅回路の入力振幅で調整できる.
Fig. 16 Operation principle of sub-Vth rising-edge detector.
図 17 RC遅延素子による入力電圧差を検出するための
カレントミラー型差動増幅回路の設計法 Fig. 17 Circuit design of differential
current-mirror-type amplifier for detecting input-voltage dif-ference with RC delay element.
発電電圧の立ち上がり速度2 V/sを検出する場合 のカレントミラー型差動増幅の設計手法を図17に示 す.MOSFETのしきい値ばらつきにより差動増幅回 路が誤動作を起こさないように,駆動nMOSFET M9 のチャネル長L9を20 µmに設定した.更に,カレン トミラー接続された負荷pMOSFETのチャネル長を 100 µmに設定し,負荷を高インピーダンス化させる ことにより,pMOSFETのゲート・ソース間電圧を 大きくしてpMOSFETのばらつきが極力回路に影響 を与えないようにした.発電電圧の立ち上がり速度が 2 V/sの場合,差動増幅回路の入力振幅は12 mVとな る.入力振幅12 mV以上の入力で差動増幅回路が増 幅動作を行い,入力振幅12 mV以下の入力で差動増 幅回路の出力電圧を減衰させるためには,差動増幅回 路のRC遅延素子に接続された駆動nMOSFET M10 のチャネル長(L10)を駆動nMOSFET M9のチャネ ル長(L9)に対してL10/L9= 0.85になるよう設定し て,M10の入力に見かけ上のオフセット電圧をもたせ ればよい. DC電圧リミッタ回路は,室内光による発電電圧の 上昇を検知するスイッチnMOSFET M11,カレント ミラー接続した負荷pMOSFET,及び,低しきい値
図 18 直流電圧リミッタ回路の動作原理 Fig. 18 Operation principle of DC voltage limiter.
図 19 光パルス検出回路の発電電流に対するステップ及
びランプ応答波形
Fig. 19 Simulated step and ramp response wave-forms of light pulse detector for input cur-rent. (Vth = 0.3 V) nMOSFET M12からなる.LED発電 電圧が0.3 V以上に上昇すると,スイッチトランジス タM11が導通し,負荷pMOSFETを介して,低しき い値nMOSFET M12がMOSダイオードとして動作 する.低しきい値nMOSFET M12で構成したMOS ダイオードの電流・電圧特性に室内光によるLEDの 発電特性を重畳した電流・電圧特性を図18に示す. 発電電圧が0.3 V(動作点A)を越えると,リミッタ 回路の動作点は,MOSダイオードの電流特性とLED の発電電流特性が交差する0.15 V (動作点B)に遷移 していく.過渡状態では,発電電圧が0.3 V以下にな ると,スイッチトランジスタM11は,非導通状態とな るが,pMOSFET負荷素子間に接続したキャパシタ C2によりMOSダイオード特性を維持できる.また, 発電電圧が0.15 Vになった後は,キャパシタC1によ り,その発電電圧を維持できるようにした. 光パルス検出回路の発電電流に対するステップ及び ランプ応答をシミュレーションで評価した結果を図19 に示す.ステップ入力の発電電流に対して,光パルス 図 20 ノーマリオフウェイクアップ受信機構成
Fig. 20 Normally-off wake-up receiver scheme.
図 21 ノーマリオフウェイクアップ受信機の入出力電圧
特性
Fig. 21 Measured input and output voltage charac-teristics for fabricated normally-off wake-up receiver. 検出回路は発電電流の立ち上がりエッジを検出できる のに対して,スルーレート0.15 nA/sをもつランプ入 力の発電電流に対しては,光パルス検出回路は発電電 流の立ち上がりエッジを検出できなくなる. ピコワット動作の光パルス検出回路を用いた赤外線 無線ノーマリオフウェイクアップ受信機構成を図20 に示す.赤外線受信機は,IR LED光電池駆動の光パ ルス検出回路,CMOSラッチ回路付きレベル変換回 路,及び,パワースイッチトランジスタからなる. 光パルス検出回路は,赤外線パルス光の立ち上がり 時の急しゅんな光強度変化を検出したときのみ,孤立 パルスを発生するため,レベル変換にはマイクロワッ ト級のED-CMOSレベル変換回路を用いた. 実際に試作した赤外線無線ノーマリオフウェイク アップ受信機で検出可能な入力電圧のスルーレートを 評価した結果を図21に示す.スルーレート2 V/s以 上の立ち上がりエッジをもつ入力電圧を赤外線受信機 は検出できることがわかる.赤外線受信機の過渡応答 を実際の赤外送受信機で評価した結果を図22に示す. 試作した赤外線受信機は,遅延時間50 msで送信機に 対して応答できることがわかった. 試作した赤外線無線ノーマリオフウェイクアップ
wake-up receiver.
図 23 赤外線無線ノーマリオフウェイクアップ受信機を
搭載したリモコンカーの写真
Fig. 23 Photograph of IR remote control car with normally-off wake-up receiver.
受信機を赤外線制御のリモコンカーに組み込んだ写 真を図23に示す.リモコンカーで電源スイッチの ON/OFF操作をすることなく,リモコン操作時に,常 にリモコンカーが動作することを確認した.
5.
む す び
マイクロ環境発電応用として,発電電力がナノワッ ト級の環境発電素子を用いて機器の待機電力を削減で きる極低電力ノーマリオフセンサスイッチ回路構成を 述べるとともに,その有用性をワイヤレスマウスや赤 外線受信機で実証した. マイクロ環境発電は,環境発電素子の発電電力が, たとえ,ナノあるいはピコワットと小さくても,極低 電力回路技術とアイディア次第で新しいアプリケー ションを創出できる魅力のある要素技術である.しか しながら,環境発電技術は,現状,実用化された製品 例も少なく,市場が期待する発電量,信頼性,コスト に達しておらず,まだ,普及に至っていない.理由と して,環境発電素子は,どんなシステムにも対応可能 な汎用の電池と異なり,内部抵抗が大きく,電源変動 も大きいため,電池駆動のシステムに対して電源を単 に環境発電素子で置き換える設計指針では,バッテリ レスでシステムを動作させることが難しいことが挙げ られる.環境発電を普及させていくためには,新たな 設計指針として,各環境発電素子の発電特性を理解し, 文 献 [1] 桑野博喜,竹内敬治(監修),エネルギーハーベスティン グの設計と応用展開,シーエムシー出版,東京,2015. [2] Alliance, EnOcean. EnOcean Equipment ProfilesV2.5. tech. rep., EnOcean Alliance, 2013.
[3] J. Southcmbe, “SJ embraces remote bearing monitor-ing,” Proc. Railway Gazette International, vol.170, no.11, p.64, Nov. 2014.
[4] A. Tanaka, Y. Nakagawa, K. Kitamura, F. Utsunomiya, N. Hama, and T. Douseki, “A wireless self-powered urinary incontinence sensor system,” Proc. IEEE SENSORS 2009 Conference, pp.1674– 1677, 2009.
[5] A. Tanaka, F. Utsunomiya, and T. Douseki, “A wireless self-powered urinary incontinence sensor sys-tem,” SICE J. Control, Measurement, and System Integration, vol.5, no.1, pp.8–12, 2012.
[6] A. Tanaka, T. Yamanaka, H. Yoshioka, K. Kobayashi, and T. Douseki, “Self-powered wireless urinary in-continence sensor for disposal diapers,” Proc. IEEE SENSORS 2011 Conference, pp.1491–1494, 2011. [7] A. Tanaka and T. Douseki, “Wireless self-powered
urinary incontinence sensor for disposal diapers,” IE-ICE Trans. Commun., vol.E97-B, no.3, pp.587–593, March 2014.
[8] A. Tanaka, F. Utsunomiya, and T. Douseki, “Wear-able self-powered diaper-Shaped urinary-Inconti-nence sensor suppressing response-time variation with 0.3-V start-up converter,” Proc. IEEE SEN-SORS 2014 Conference, pp.684–687, 2014.
[9] A. Tanaka, T. Ishihara, F. Utsunomiya, and T. Douseki, “Wireless self-powered plant health-monitoring sensor system,” Proc. IEEE SENSORS 2012 Conference, pp.311–314, 2012.
[10] A. Tanaka, F. Utsunomiya, and T. Douseki, “Wire-less self-powered sensor system with sap-activated battery for plant health monitoring,” IEEJ Trans. SM, vol.134, no.3, pp.52–57, March 2014.
[11] F. Utsunomiya and T. Douseki, “Nanowatt-power-level automatic-switch circuit combining CMOS and photodiode,” Proc. IEEE SENSORS 2010 Confer-ence, pp.1918–1921, 2010.
[12] F. Utsunomiya and T. Douseki, “Nanowatt-power-level automatic-switch combining ED-CMOS circuit and LED,” IEICE Trans. Electron, vol.E95-C, no.6, pp.1104–1109, June 2012.
[13] F. Utsunomiya, A. Tanaka, and T. Douseki, “A self-powered photosensor switch detects only rising edge of infrared-light pulse for wireless zero-standby-power wake-up receiver,” Proc. IEEE SENSORS 2010 Con-ference, pp.1432–1435, 2013.
[14] エレコム株式会社,ニュースリリース (HP),http://www. elecom.co.jp/news/201508/m-wk01db/index.html [15] T. Douseki, T. Shimamura, and N. Shibata, “A
0.3-V 3.6-GHz 0.3-mW frequency divider with differen-tial ED-CMOS/SOI circuit technology,” ISSCC Dig. Tech. Papers, pp.114–115, 2003.
[16] T. Douseki, T. Shimamura, and N. Shibata, “A sub-0.5 V differential ED-CMOS/SOI circuit with over-1-GHz operation,” IEICE Trans. Electron, vol.E88-C, no.4, pp.582–588, April 2005.
[17] T. Masuhara, M. Nagata, and N. Hashimoto, “A high-performance n-channel MOS LSI using depletion-type load elements,” IEEE J. Solid-State Circuits, vol.SC-7, no.3, pp.224–231, June 1972. [18] T. Tokuda, K. Okazaki, K. Sakashita, I. Ohkura, and
T. Enomoto, “Delay-time modeling for ED MOS logic LSI,” IEEE Trans. Comput.-Aided Des. Integr. Cir-cuits Syst., vol.CAD-2, no.3, pp.129–134, July 1983.
[19] 田中亜実,宇都宮文靖,吉見 歩,道関隆国,“nW 級暗 所起動用回路を搭載した可視光 LED 発電によるノーマリ オフ自動スイッチ付きワイヤレスマウス,”平成 27 年度電 気学会センサ・マイクロマシン部門総合研究会,pp.9–13, 2015. (平成 28 年 1 月 10 日受付,5 月 12 日公開) 道関 隆国 (正員) 1982年 3 月福井大学大学院修士課程了. 同年日本電信電話公社(現 NTT)電気通 信研究所入社.以来,低電圧 ECL-CMOS メモリ回路,低電圧 MTCMOS 回路,極 低電圧 MTCMOS/SOI 回路等の CMOS 回路研究に従事.2006 年 4 月立命館大学 理工学部電子情報デザイン学科教授.2012 年 4 月同大学理工学 部電子情報工学科教授.環境発電を利用したバッテリレスシス テムの研究開発に従事.2009 年電子情報通信学会業績賞受賞. 応用物理学会,電気学会,IEEE 会員.工学博士(大阪大学). 田中 亜実 (正員) 2011年 3 月立命館大学大学院理工学研 究科創造理工学専攻博士課程前期課程修了. 2014年 3 月同大学大学院理工学研究科総 合理工学専攻博士課程後期課程修了.工学 博士.同年 4 月立命館大学理工学部電子情 報工学科特任助教.以来,身の回りの自然 エネルギーを利用したバッテリレスシステム構築の研究に従事. IEEE会員. 宇都宮文靖 1992年 3 月国立豊橋技術科学大学大学 院工学研究科修士課程生産システム工学専 攻修了.2014 年 3 月立命館大学大学院理 工学研究科総合理工学専攻博士課程後期課 程満期退学.工学博士.1992 年 4 月セイ コー電子工業株式会社(現セイコーインス ツル株式会社)入社.以来,低電圧,低消費電力 CMOS 回路 開発設計に従事.