ACC
車両による直線道路における渋滞の解消
2015SC089高田康平指導教員:陳幹
1
はじめに
従 来 か ら 研 究 開 発 さ れ, 商 品 化 さ れ て い る Adaptive Cruise Control (ACC) Systemとは,前方の車両と車間
距離を一定に保ちながら走行する機能である.また,交通 渋滞の解消方法として用いられている.さらに,ACC搭載 車の数が増加することで,後方の車両への速度伝播が少な くなることから,渋滞の解消が期待できる.しかし,ACCは 普及が進むにつれ,交通流の乱れや疎密の抑制を改善して いく必要があると考えられる[1].改善していくためには, 車群安定性と交通の流れが安定していることが重要である [2].本研究では,ACC搭載車を用いる.10台の車群を用い て,先行車以外の9台をACC搭載車とする.制御器設計を 行い,前方の車両の状況に合わせて,交通の流れが安定する ようにモデルを設計し,シミュレーションを評価する.
2
モデリング
2.1 モデル式 10台の車群の渋滞の一部から切り取った2台の車両の 追従走行を表すモデル図を図1とする.ACC搭載車と先行 車の車間距離は,d(t)である.車両追従のモデルを式(1)と する.理想の加速度の入力値をu(t),ACC搭載車の加速度 a(t)を出力とし,1時遅れの式とする[3]. 図1:先行車と追従車のモデルui(t)= τ ˙ai(t)+ ai(t) (1)
2.2 物理パラメータ 本研究で取り扱う物理パラメータを表 1 に示す.i は i >= 2であり,車両の番号を表す. 表1 物理パラメータ ai−1(t) i− 1 番目の車両の加速度 [m/s2] ai(t) i 番目の車両の加速度 [m/s2] ui(t) i 番目車両の入力値 [m/s2] vi−1(t) i− 1 番目の車両の速度 [m/s] vi(t) i 番目の車両の速度 [m/s] vri(t) i− 1 番目と i 番目の 2 車両の相対速度 [m/s] di(t) i− 1 番目と i 番目の 2 車両の車間距離 [m] dpi(t) i− 1 番目と i 番目の 2 車両の目標車間距離 [m] ϵi(t) 車間距離と目標車間距離の誤差 [m] τ 時定数 [s] h 目標車間時間 [s] 2.3 状態方程式 ai−1(t)を外乱とし,状態変数を(2)式とする.(2)式より, 状態方程式は(3)式となる. xi(t)= vari(t)i(t) ϵi(t) (2) ˙ xi(t)= Ax(t)+ Bui(t)+ Dai−1(t) (3) A = − 1 τ 0 0 −1 0 0 −h 1 0 B = 1 τ 0 0 , D = [ 0 1 0 ]
3
制御器設計
3.1 PD制御 先行車に対してのACC搭載車の追従性能を向上させる ために,本研究では制御器にPD制御を用いる.入力ui(t) を(4)式とする.ui(t)= kp(vi−1(t)− vi(t)) + kd(di(t)− dpi(t)) (4)
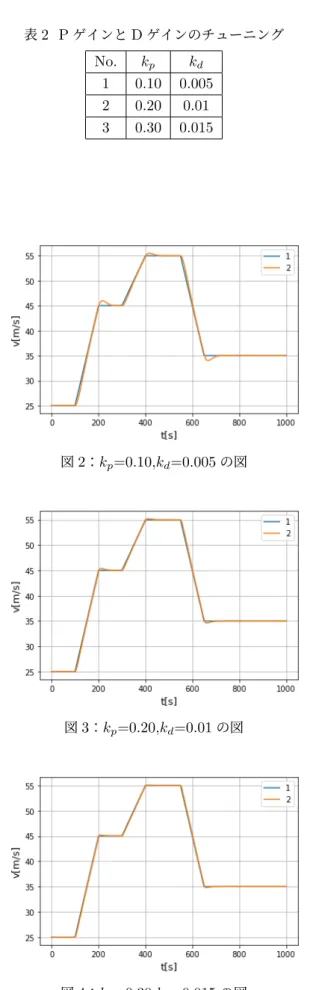
直線道路に2 台の車両が,追従走行しているとする.3組 のゲインを組み込み,シミュレーションに用いるのに妥 当なゲインを求める.1台目を先行車,2台目をACC搭載 車とする.1台目の先行車の加速度を100∼200[s]の間で 0.2[m/s2],300∼400[s]の間で0.1[m/s2],550∼650[s]の間 で-0.2[m/s2],その他では0[m/s2]になるように設定する.1 台目の速度に応じて,2台目が追従する.表2にPゲインと Dゲインのチューニングを示す.また,結果を図2,図3,図 4に示す. 1
表2 PゲインとDゲインのチューニング No. kp kd 1 0.10 0.005 2 0.20 0.01 3 0.30 0.015 図2:kp=0.10,kd=0.005の図 図3:kp=0.20,kd=0.01の図 図4:kp=0.30,kd=0.015の図 図2,図3,図4より,先行車とACC搭載車の速度の誤差 が少ないのは,図4である.よって,PゲインとDゲインは (kp,kd)=(0.30,0.015)が妥当である.
4
シミュレーション
本研究では,直線道路に10台の車両が1列で走ってい るとし,一番前の車両を先行車,それ以外の車両をACC搭 載車とする.1台目の車両の初速度を25[m/s]とし,200∼ 300[s]の間で0.3[m/s2],500∼600[s]の間で-0.2[m/s2],そ の他では0[m/s2]になるように設定する.2台目から10台 目を1台目に追従させることで,速度の結果を見る.1台目 から10台目までの速度の比較図を図5とする. 図5:速度の比較図 2台目から10台目のACC搭載車は,1台目の先行車を追 従している.また,2台目から10台目と先行車との速度の誤 差を少なくすることができた.5
考察
,
課題
考察として,ACC搭載車を用いたシミュレーションよ り,2台目から10台目と先行車との速度の誤差が少ない観 点において,渋滞の解消を行うことができている.誤差を0 にするために,制御器の精度を向上させていく必要がある.6
おわりに
本研究の成果は,渋滞の解消を行うための制御器を設計 し,車両間の誤差を少なくしたことで,直線道路上の渋滞の 解消を行うことができた。今後の課題としては,車両を増 やした後,無作為にACC搭載車を設定し,より現実的なシ ミュレーションを行うことである.参考文献
[1] 山 本 吉 典, 瀬 戸 陽 治, 永 井 正 夫:「 車 車 間 通 信 を 利 用 し た 車 群 安 定 ACC の 研 究 」. 日 本 機 械 学 会 誌,Vol.73,No.726,p18-22,(2007). [2] 川邊武俊:「知的交通システム (ITS)における自動操 縦制御-車間距離制御と車群安定性-」.日本機械学会 誌,Vol.104,No.989,p42-45,(2001).[3] Jing Zhou,Huei Peng,”Range Policy of Adaptive Cruise Control Vehicles for Improved Flow Stabil-ity and String StabilStabil-ity”,IEEE Transactions on In-telligent Transportation Systems,Vol.6,No.2,p229-237,(2005).