4
Research and Development Trends in Robot Technology
–Toward Promoting the Commercialization of Personal Robots–
HIROSHI KOMATSU
Information and Communications Research Unit
1 Introduction
1.1 The birth year of Astro Boy
In 2003, a variety of events were held across Japan to celebrate Astro Boy’s birthday, which falls on April 7th in the famous comics featuring the robot hero. Similar enthusiasm was seen in
“ROBODEX (Robot Dream Exposition)[1],” the world’s largest-scale exhibition of partner robots.
Showcasing about 80 models of human-friendly robots, the four-day event attracted nearly 70,000 visitors. Through its history of three shows, ROBODEX has seen steady growth year after year in the number of presenters, many of which are private corporations and universities (Figure 1).
One of the demonstrations in ROBODEX 2003 featured a humanoid biped walking robot which, if it loses balance by external forces from different directions and falls, can execute a break-fall to reduce the impact of the crash and then stand up without help. Another exhibitor presented a robot that can serve as a home guard during the owner’s absence with its capability
of memorizing the contours of human faces, identifying and recognizing up to about ten persons, and reporting emergencies.
1.2 Hopes and concerns about robot technology
Since the 1990s, Japan’s output of robots, most of which are for manufacturing, has been hovering at approximately ¥500 billion[2]. The majority of them are industrial robots designed pr i mar i ly for the automobi le and electr ic machinery industries, while very few have been used in the non-manufacturing sectors. However, the appearance of AIBO[3] on the market in 1999 changed the traditional trends. The proven popularity of AIBO, a dog- shaped pet robot capable of quadruped walking, called attention to the personal robot market. As more businesses moved into the field, robots for home use now form a market that outputs ¥5 billion annually.
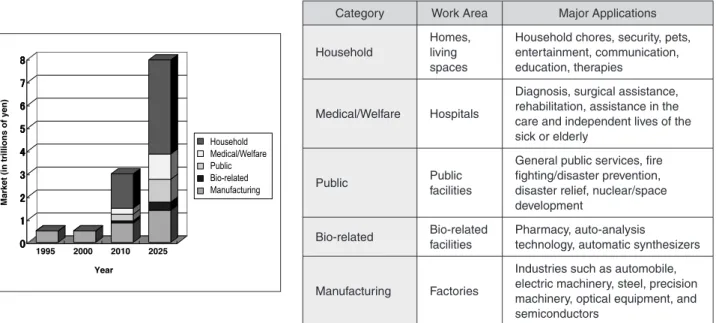
Fig u re 2 shows a long - ter m foreca st of the robot market made by the Japan Robot Association[4]. It predicts particular growth in the household sector, whose scale in value is
Source: Author’s compilation based on the official website of ROBODEX[1]. Figure 1:Trends in the number of presenters at the ROBODEX robot exhibition
forecasted to reach ¥1.5 trillion by 2010 and as much as ¥4.1 trillion by 2025.
There is no doubt that Japan will face a fast-paced aging of the population and a sharp decline in birthrate earlier than any other nation in the world during this century. To be ready for such a future society, the country is increasingly longing for domestic robots that can support, in particular, the health care and daily life of older persons. In addition, as people in Japan, a country that used to be known as the safest in the world, become more and more concerned about security and safety of their daily life, the application of robots such as the one that allows the owner to monitor the house during his/her absence is attracting attention. Another potential benefit of robots is to assist those who have limited access to information as an advanced next-generation in formation terminal that can more easily interface with humans than keyboard - based systems.
Some even expect robots to contribute to the creation of new industries and have launched regional development projects in regions such as Kinki, Gifu and Kyushu[5-7].
Given these recent developments in robotics, you can safely say that Japan is now in the first robot boom since the early 1980s, a period when industrial robots became widely available in the nation. It is therefore reasonable that Japan places great expectations on the future of the robotics
industr y, an area where Japan is generally considered to have the overwhelming technical competitive strength. Despite such a boom, however, some, especially experts, are in doubt about the future of Japan’s robot technology.
In contrast to the general expectations on robots and the superficial sophistication of robot technology, there is a sense of frustration particularly in the industry over robot technology, where no innovative technological advancement has been made.
This article describes the trends in robot technology, focusing on personal robots that are intended for coexisting with humans, and identifies challenges in this field.
2 What is a robot?
2.1 Basic elements
A wide range of machines including toys are called robots*1, and are being actively produced today. This trend is even mentioned as a “Cambrian explosion” in connection with biological evolution. Since robots are currently undergoing such diversification, there is no established definition of a “robot” as of now.
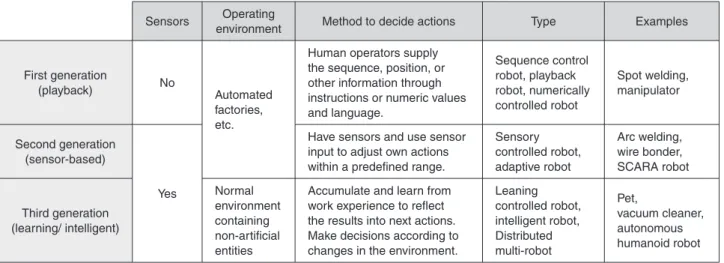
Table 1 compares the basic elements of robots discussed here and those of a human. What the author refers to as a robot in this report is machinery that contains at least a computer such as a CPU to process input information and a Figure 2:Forecast of the future robot market in value
Category Work Area Major Applications
Household
Homes, living spaces
Household chores, security, pets, entertainment, communication, education, therapies
Medical/Welfare Hospitals
Diagnosis, surgical assistance, rehabilitation, assistance in the care and independent lives of the sick or elderly
Public Public
facilities
General public services, fire fighting/disaster prevention, disaster relief, nuclear/space development
Bio-related Bio-related facilities
Pharmacy, auto-analysis
technology, automatic synthesizers
Manufacturing Factories
Industries such as automobile, electric machinery, steel, precision machinery, optical equipment, and semiconductors
Source: Author’s compilation based on “Summary Report on Technology Strategy for Creating a ‘Robot Society’ in the 21st Century”[4].
mechanical actuator system for output*2.
Recent models of sophisticated computers are sometimes enabled to accept audio or image input. Robots are different from these computers in that they produce mechanically-driven output.
You may also regard a robot as a fusion of traditional mechatronics, a computer as the brain and sensors as input organs.
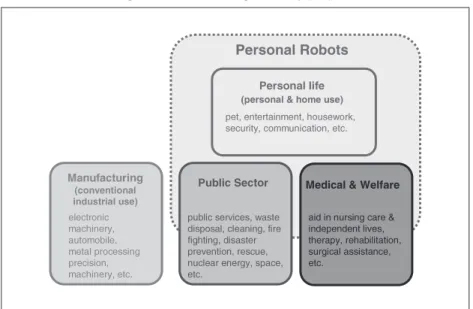
In Table 2, robots are divided into three generations based on the presence of sensors t hat act a s t he i nput dev ices, t hei r work environments, and their information processing method employed to determine their movements on the basis of the former two conditions. The first-generation consists of robots that can repeat predefined actions, such as playback robots. The second-generation robots contain sensors so that they can adjust their own movements in accordance with the input from the sensors within their given ranges. The robots in the third-generation or later are capable of learning from work experience to reflect the results into the following actions or of recognizing environmental changes and defining their next actions. The first- and second-generation robots are designed to operate in 100% artificially arranged environments (structured environments)
such as automated factories. On the other hand, the robots in the third- generation or later are intended for use in unstructured environments.
This requires them to be able to understand and identify the surrounding environment including non-artificial objects before they can decide on actions to conduct. Speaking of generations, it is common that the emergence of new-generation systems eliminates the older systems. However, the fact that technological development of the manipulator, a first- generation robot, is still ongoing[8] indicates that in robotics a new generation does not necessarily expel earlier generations.
2.2 Development History
Table 3 shows major events in past robotics research and development. Robotics research originates in the 1947 launch of the research on manipulators for nuclear facilities in the U.S. The project aimed at the creation of a master-slave manipulator on which the operator’s control of the master arm outside the wall guided the mechanical hand of the slave arm existing in the radiological environment on the other side of the wall. In the U.S., following this initial
Input Information Processing Output
Human Five senses
Brain, nerves Kinematic system
Sight, touch, etc. Arms, legs, muscles, etc.
Robot Instructions, sensor information, etc.
Computer Actuating system
Programs, vision, pressures, etc. Arms, mobile mechanism, actuators, etc.
Table 1:Comparison of the basic elements of a human and a robot
Source: Author’s compilation based on the “Robot Handbook”[2].
Sensors Operating
environment Method to decide actions Type Examples
First generation
(playback) No
Automated factories, etc.
Human operators supply the sequence, position, or other information through instructions or numeric values and language.
Sequence control robot, playback robot, numerically controlled robot
Spot welding, manipulator
Second generation (sensor-based)
Yes
Have sensors and use sensor input to adjust own actions within a predefined range.
Sensory controlled robot, adaptive robot
Arc welding, wire bonder, SCARA robot
Third generation (learning/ intelligent)
Normal environment containing non-artificial entities
Accumulate and learn from work experience to reflect the results into next actions.
Make decisions according to changes in the environment.
Leaning controlled robot, intelligent robot, Distributed multi-robot
Pet,
vacuum cleaner, autonomous humanoid robot Table 2:Robot generations on the basis of their decision making process
Source: Author’s compilation based on Reference [9] and other material.
attempt, studies on controlling manipulators through computers were conducted. By the latter half of the 1960s, the Massachusetts Institute of Technology and others successfully invented robot hands and wheeled mobile robots, among others, and further robotics development efforts continued mainly for use in experiments to demonstrate theories on artificial intelligence.
I n Japa n, where computer s had not yet flourished as much as in the U.S. at the time, sequence control was utilized in engineering research on mechanical fingers. In the area of industrial robots, Japan initiated the development of its own models motivated by American robots, which were patented and commercialized in the U.S. and imported to Japan in the latter half of the 1960s. This later led to the advancement and spread of industrial robots in Japan.
In the 1970s, further progress was made in the research into the second- generation robots as
well as in various sensor technologies, followed by the launch of the research activities toward the intelligent third-generation robots in the 1980s.
One of the recent events that attracted attention was the 1996 presentation of the world’s first humanoid robot capable of autonomous biped dynamic walking*3 named P2 by Honda Motor Co., Ltd. Compared to P2, standing 1.8m tall and weighing 210kg, ASIMO[11], one of the succeeding models, is significantly smaller and lighter at 1.2m in height and 43kg in weight. Primary contributors to the downsizing were lighter materials for the robot, smaller-sized, higher-performance motors used as the actuators, and the shrunk and lower-power control system including the LSI circuits. Even with such a compact body, however, ASIMO’s battery lasts only about 30 minutes, highlighting the power issue as a challenge not limited to ASIMO but also common across all kinds of mobile robots.
Table3 :History of robotics research and development
*1: The patent was filed by G.C. Devol of the U.S.
*2: Consolidated Control Corporation of the U.S.
*3: Unimation Inc. and AMF Corporation, both of the U.S.
*4: SCARA stands for “Selective Compliance Assembly Robot Arm” (horizontally articulated).
Source: Author’s compilation based on Reference [10].
Decade Year Generation Major R&D activity Related issue
1940 47
First
Start of research on the manipulator (U.S.)
1950
54 58
Grant of the first industrial robot patent (U.S.)*1 Creation of the first prototype industrial robot (U.S.)*2
1960
61 62
67 68
Computer-controlled manipulator (U.S.) Playback robot (U.S.)*3
Technical tie-up with Unimation (Kawasaki Heavy Industries)
Import of industrial robots from the U.S., followed by widespread development activities in Japan
Second 1970
70 73
Visual computer control (Hitachi)
WABOT-1 (Waseda Univ.; the first humanoid capable of biped static walking)
1980
80
83 85
SCARA*4 robot
Dawn of the robot age (Proliferation of industrial robots in Japan)
Foundation of the Robotics Society of Japan
Public presentation of robots at the Tsukuba Expo
Third
1990 96
99
P2
(a humanoid capable of autonomous biped dynamic walking from Honda)
Release of a pet robot AIBO (Sony)
2000 01 Release of a home vacuum cleaning robot
(iRobot, U.S.)
3 What are personal robots?
3.1 Robot classification by purpose, and development examples of personal robots
Figure 3 shows different types of robots classified by purpose. Figure 4 is a two-dimensional chart of the application fields of robots categorized by the two primary aspects: the control method and mobility.
Personal robots are any type of robot that can assist people in their daily life, including ones that are aimed at helping people live independent lives by par tial ly per for ming household and cooking chores and nursing care such as rehabilitation therapies, and ones
that are intended for security, communication, mental therapy, education, entertainment and so forth. While robots in these application fields, collectively called the household field, are often used by individuals in homes, some find application in the medical/welfare field and public facilities in the forms of electric wheelchairs, RT (Robot Technology) beds, and even RT houses and RT hospital rooms in which the entire facilities can operate like a robot.
The traditional robots used for manufacturing are enabled to perform preprogrammed tasks in structured environments such as automated factories. By contrast, personal robots work alongside humans and provide a variety of services as in interacting with humans.
Figure 3:Robots categorized by purpose
Source: Author’s compilation based on the handout of a meeting of the Council for Science and Technology Policy[12] and other material.
Figure 4: Major robotic capabilities and their application fields
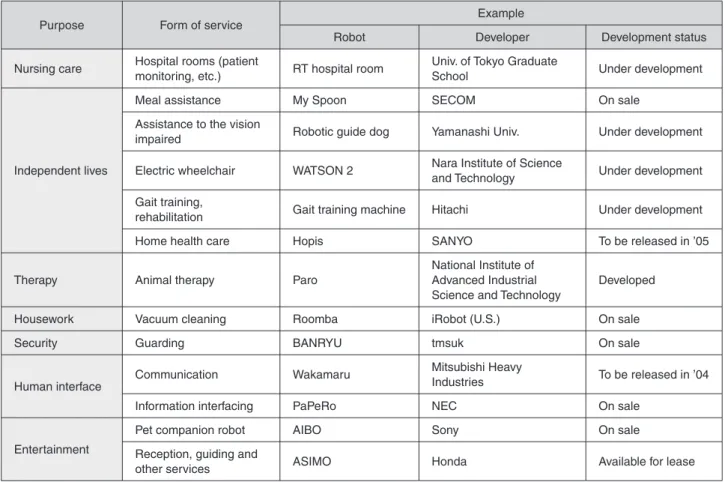
Table 4 shows the application fields of personal robots along with examples and the development status in each category.
3.2 Technologies Essential to Personal Robots
In the two aspects indicated in Figure 4, functional requirements for personal robots a re sig n i f ica ntly d i f ferent f rom those for conventional industrial robots. Although some industrial robots such as automatic transfer systems are enabled to move through space, their actions occur only within the designated areas in a factory. The second-generation robots, which can autonomously adjust their actions on the basis of input signals from sensors, are also categorized as robots for manufacturing.
Since these robots are given relatively simple i n for mation and options when they ma ke decisions on their next movement, programs input by operators are not complex. In this way, industrial robots are basically assigned a single function and, therefore, far exceed humans in terms of work processing speed, accuracy and so on, as far as that specific task is concerned. These
conventional industrial robots are typically in a shape optimized for the assigned task.
On the other hand, personal robots are expected to work in the same space that humans live in. This is where personal robots differ considerably from the conventional industrial robots, which are required by law*4 to operate in spaces completely separate from humans’ for the protection of industrial safety and health.
Personal robots need to move autonomously in accordance with human movements. The need to operate in the human living space makes it extremely difficult for robots to recognize their environment. Unlike automated factories, human living environments vary widely. This means a tremendous increase in the volume of information a robot must identify and make decisions from. Moreover, since appearance is an important element of personal robots in interactions with humans, some are designed to resemble pets or humans. Based on these aspects, the functional requirements for personal robots are summarized as follows.
Table 4: Examples of personal robot development projects
Purpose Form of service Example
Robot Developer Development status
Nursing care Hospital rooms (patient
monitoring, etc.) RT hospital room Univ. of Tokyo Graduate
School Under development
Independent lives
Meal assistance My Spoon SECOM On sale
Assistance to the vision
impaired Robotic guide dog Yamanashi Univ. Under development
Electric wheelchair WATSON 2 Nara Institute of Science
and Technology Under development Gait training,
rehabilitation Gait training machine Hitachi Under development
Home health care Hopis SANYO To be released in ’05
Therapy Animal therapy Paro
National Institute of Advanced Industrial Science and Technology
Developed
Housework Vacuum cleaning Roomba iRobot (U.S.) On sale
Security Guarding BANRYU tmsuk On sale
Human interface Communication Wakamaru Mitsubishi Heavy
Industries To be released in ’04
Information interfacing PaPeRo NEC On sale
Entertainment
Pet companion robot AIBO Sony On sale
Reception, guiding and
other services ASIMO Honda Available for lease
(1) Mobi lit y i n the human livi ng space (unstructured environments);
(2) C a p a b i l i t y o f r e c o g n i z i n g a n d comprehendi ng thei r envi ron ment, including changes as they move;
(3) Capability of determining their next actions on the basis of their environment;
and
(4) Sa fet y i n not ha r m i ng hu ma ns a nd reliability in not having to depend on humans.
In contrast to industrial robots, which are in principle single - function robots that can efficiently perform only specific tasks, personal robots are required to offer versatile functions as well as to adapt to versatile environments.
Personal robots will need to incorporate, in addition to sensors that act as input devices, sophisticated artificial intelligence to process input information and make decisions based on the results. Furthermore, not to mention safety to humans, high reliability of systems to allow these robots to operate independent of human assistance is demanded.
4 Recent trends in personal robots
Vacuum cleaning robots for households have been marketed abroad since 2001, and since the latter half of 2002 in Japan. They are the second type of personal robots with autonomous mobility after pet robots that have found their way into homes. Since the beginning of 2003, more consumer electronics manufacturers have expressed their intention to enter this market.
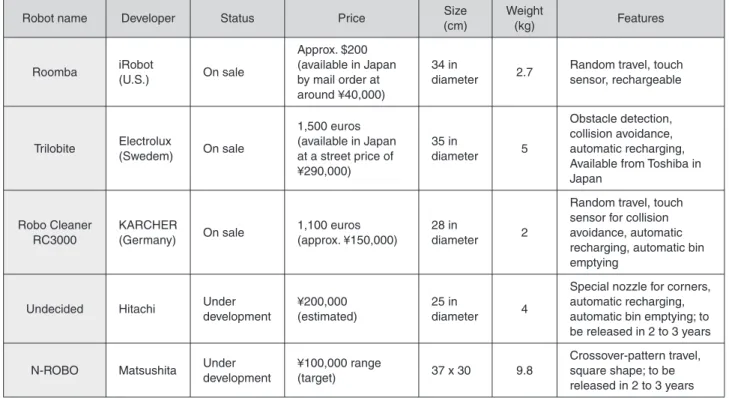
Table 5 shows the commercialization status of autonomous vacuum cleaner robots.
As long as its task is limited to vacuum cleaning, a robots’ shape and mobile mechanism may be relatively simple, thereby allowing this type of autonomous mobile robots to be usable in homes.
Although their functions and prices vary widely depending on the models, vacuum cleaning robots are already available at affordable prices for many consumers. While some doubt whether vacuum cleaners as expensive as ¥200,000 will sell, demand for such products could be high among older persons who feel floor cleaning is too exhausting or among double - income couples who want to save time in household chores. The fact that some consumer electronics manufacturers have recently announced their Table 5:Commercialization status of home vacuum cleaning robots
Prices as of July 2003
Robot name Developer Status Price Size
(cm)
Weight
(kg) Features
Roomba iRobot
(U.S.) On sale
Approx. $200 (available in Japan by mail order at around ¥40,000)
34 in
diameter 2.7 Random travel, touch sensor, rechargeable
Trilobite Electrolux
(Swedem) On sale
1,500 euros (available in Japan at a street price of
¥290,000)
35 in
diameter 5
Obstacle detection, collision avoidance, automatic recharging, Available from Toshiba in Japan
Robo Cleaner RC3000
KARCHER
(Germany) On sale 1,100 euros (approx. ¥150,000)
28 in
diameter 2
Random travel, touch sensor for collision avoidance, automatic recharging, automatic bin emptying
Undecided Hitachi Under
development
¥200,000 (estimated)
25 in
diameter 4
Special nozzle for corners, automatic recharging, automatic bin emptying; to be released in 2 to 3 years
N-ROBO Matsushita Under
development
¥100,000 range
(target) 37 x 30 9.8
Crossover-pattern travel, square shape; to be released in 2 to 3 years
plans to market vacuum cleaning robots also suggests that businesses are foreseeing potential growth in this market. Given that companies who have already released their first model are working toward more advanced successors, it is highly likely that vacuum cleaning robots will come into widespread use and become available at lower prices, resulting in the rapid expansion of the market.
The popularity of pet robots is somewhat reliant on consumers’ curiosity and the rarity value of the products as seen at the time of the release of AIBO for limited sale. Their toy-like nature makes their sales highly sensitive to enthusiasm among consumers. Since vacuum cleaning robots, unlike pet robots, are purchased for their “usefulness,” they will steadily penetrate into society once accepted.
Aside from pet and vacuum cleaning robots, some other types of robots are already available on the market or are scheduled to be available:
a guard robot (Sohgo Security Services Co., Ltd., Mitsubishi Heavy Industries, Ltd., and tmsuk Co., Ltd.) and a household robot with the capabilities of voice/image recognition and reading e-mail me s s a ge s ( N E C Cor por at ion a nd Tosh iba Corporation). In the area of home security, with a view to taking greater advantage of robots as physical entities, a company has made a prototype robot that can provide physical services such as carrying out initial fire suppression with its built-in fire extinguisher by remote control, in addition to sending alerts upon detection of unusual events and generating audible or light alarms[13].
5 The Current status and challenges of robotics research and development
5.1 Technological competitiveness
Japan began importing robotic products and technologies from the U.S. in the late 1960s and i n itiated its own development ef for ts concurrently. This move was followed by the development of second - gener ation robots from the beginning of the 1970s, which has allowed the nation to lead the world in the field of industrial robots in terms of technological
development, output, and the application to production factories. It is safe to say that the introduction of robots to production facilities has served as the basis of the Japanese manufacturers’
international competitiveness. Even today, Japan contributes approximately 60% to the worldwide production of industrial robots, demonstrating s ol i d t e c h nolo g ic a l d o m i n a nce a s f a r a s production for the industrial sector is concerned.
What should be noted is that most of the technologies used for industrial robots are second-generation or earlier robot technologies, which were fundamentally developed during the period between the 1960s and the first half of the 1980s. Discussions on future international competitiveness in robot technology should focus on third- generation robot technologies in the household sector, where considerable market growth is forecasted toward the future. In fact, the U.S. and Europe, where robotics development has primarily been driven by national projects, reportedly hold a competitive edge over Japan in advanced robots for use in extreme environments in such fields as space exploration, nuclear development, and disaster response[5]. According to the Japan Robot Association ( JARA), while Japan is competitive in the application of robots for manufacturing and construction, the U.S. and Europe maintain strength in applying robotics to the nuclear energy, space, marine, probing, and welfare fields. As Table 6 shows, the JARA concludes that Japan has a competitive edge in leg- and wheel-based mobile technologies as well as in visual recognition and sensor technologies.
In comparison with the U.S. results, however, there are no f ields where Japan surpasses t he r iv a l except for whe el - b a s e d mobi le technology.
Today it is a reality that Japan is about to lose its lead to the U.S. in advanced robot technology, despite Japan’s current large share in the production of industrial robots. Japan was the world’s leader in the development of the second - generation robots, which were sensor- based and therefore permitted visual recognition and sensor technologies to form the core of the systems. However, Japan already lags behind the U.S. in human interfaces, networking, media and software, which are the technologies
essential to the third - generation robots, the robots that are a critical element in determining future technological strength.
Japan should be aware that its dominant competitive strength in robot technology, a widely accepted assumption, comes from the production volume of industrial robots and that robots for household purposes, which is a prospective growth sector, require different sets of technologies. From this perspective, it is questionable whether Japan can remain competitive in robot technology in the future over a long period of time.
5.2 Challenges in research and development
Table 7 shows past major national projects concerning robot development. Since these previous projects centered on the development of constituent technologies, none of them were designated to achieve a specific final system in the first place. Each project aiming at a different set of constituent robotics technologies was further divided into detailed projects, resulting i n l it t le con nec t ion bet ween t he projec t teams. It is no doubt that the development of constituent technologies is an essential element to be considered in the beginning of a project.
However, what is equally important is to provide the project team with the concept of the final
system and a concrete goal to achieve with that system so that the original theme can be divided into constituent technologies. This would help the project team identify its target level and time limit, thereby promoting systematic development.
One of the challenges Japan currently faces in robotics development activities, as in the past projects shown in Table 7, is the vagueness of the development objectives and of the target systems.
This may sometimes be unavoidable depending on the design of the project and the technological level to start with. Nevertheless, the system to be achieved should be clearly defined for future projects, now that examining technical prospects is easier than in earlier times.
Constituent technologies must be intended for integration into a certain system. However, the national projects in the past and many of the ongoing robotics research activities at universities have not gone beyond the development of constituent technologies, often stopping short of constructing any practical systems. Even in the rare case where such a system has been built, problems remain such as that researchers fail to fully ascertain problems concerning the robustness and reliability of the resulting system because they do not emphasize field trials.
If a project aiming at developing a system involves field testing, it could be a long-term, Table 6:International competitiveness in advanced element technologies in robotics
Source: “Summary Report on Technology Strategy for Creating a ‘Robot Society’ in the 21st Century”[4]
Application field Japan U.S. Europe
Manipulation △ ○ △
Mobility (legs) ○ ○ △
Mobility (crawlers) △ △ ○
Mobility (wheels) ○ △ △
Multi-fingered hands △ ○ △
Remote-controlled devices and associated controllers △ ○ ○
Micro- and nano-level devices △ △ △
Simulation △ ○ ○
Human interfaces △ ○ △
Intelligent control technology △ △ △
Sensors ○ ○ △
Visual recognition ○ ○ △
Networking technology △ ○ △
Media technology △ ○ △
Software △ ○ ○
○; Competitive
△; Average level
×; Not competitive
la rge - budget project. W hat t ype of robot should be pursued is still an important issue in such a project. Considering social needs in the approaching aged society of Japan and the ripple effect that technologies could have, it is recommended that robotics projects in Japan be directed toward the commercialization of robots for application to public services such as supporting nursing care and the independent lives of the elderly.
A not her ch a l lenge i n t he re s e a rch a nd development of robot technology in Japan is a gap between industry and academia stemming from the difference in their directions of efforts.
In Japan, the development of robot technologies, particularly that of industrial robots, has been conducted by private businesses. This may seem reasonable in a country where more than 250 firms, the peak number, were involved in the production of robots and their components as of 1985, when the application of industrial robots swelled, and where over 150 firms still exist in the industry at present. In reality, however, businesses are narrowing the scope of their research and development to concentrate on potentially profitable areas in a shortsighted r e s p o n s e t o i n t e n s i f y i n g i n t e r n a t i o n a l competition. Honda’s development of humanoid robots is one of a few examples against such trends. On the other hand, university-led research activities focus on autonomous mobile robots, among other third-generation robots, and often seek to add new capabilities to them. University researchers’ intention to pursue new techniques and concepts on which they can write academic papers have widened the gap between industry and academia.
Since robotics is a popular research discipline among Japanese students, perhaps encouraged by
robot contests*5 [14], there are roughly 100 robotics laboratories in universities across Japan*6 [15]. If these laboratories continue to seek different academic goals on an individual basis, their research activities will become dispersed and scaled- down. A common goal should be set to prevent these research and development activities from scattering.
The personal robot market for the public sector has not shown significant growth so far, even though the sector is expected to serve as an engine for the diffusion of robots for households.
The development of robots for public facilities is hardly a task that can be conducted solely by the private sector, because there are hurdles before their commercialization such as setting safety standards. The development of robots in this area should be facilitated by the national government a n d l o c a l p u b l i c o r g a n i z a t i o n s t h r o u g h procurement of robotic systems or subsidization to promote purchases of such systems. For example, a public body can place a relatively large order for robots to a private corporation and have them delivered with designated specifications within a set time limit. The public body can then let the manufacturer compile field problems over the next few years while having them perform maintenance of the robots. If the project is too large to be met by a single company, it will inevitably lead the company to seek partnerships with other companies and universities. As different organizations work together toward a single project under the initiative of the company that assumes responsibility for the overall construction of the system, laboratories with outstanding development capacity will be naturally connected with each other.
Other than such procurement projects, the government should establish safety standards Table 7:Major national projects for the development of robot technology
Year Project Budget (¥100M) Items developed
’82 – 89 Advanced Robot Technology 180 Articulated / multi-fingered manipulators, intelligent / high-presence remote control
’91 – 00 Micro machine Technology 250
Autonomous robotic inspection system for pipes
(micro robots, integration of functions), sensor catheters, micro factory technologies
’98 – 02 Humanoid Robotics 50
Humanoid biped walking robot
Platforms (Motion simulator, remote control cockpit, sophisticated hands, etc.)
Source: Author’s complation based on “Robot Handbook”[2]
concerning robot technology. Although national safety standards for industrial robots already exist, they basically regulate how to isolate the operating areas of robots from those of humans and are, therefore, not applicable to personal robots. In addition to the development of safety standards and regulations, the government should also take the initiative in the standardization of robot technology.
6 Robotics development in the future
Computers have proven themselves far superior to humans in speed and accuracy when it comes to performing the four fundamental operations of arithmetic. Their high ability combined with reduced prices has made them prevalent among ordinary citizens and a must in people’s daily life.
For the same reason, robots for the manufacturing industry have rapidly taken the place of human workers in limited operational areas. Robots in the household sector, which are mainly designed to perform tasks that could otherwise be handled by humans, should also move toward the same goal, that is to say, functionality and performance outside of human reach. In continuous patient monitoring and 24 -hour security guarding, for example, robots might prove superior to human counterparts in that robots never become tired, if their operating accuracy could improve.
However, before people can take advantage of mobile robots over traditional surveillance cameras, further technological development is needed i n order to reduce thei r power consumption, to sophisticate the batteries, and to enhance the information processing capacity including artificial intelligence to recognize the conditions of the environment.
It is often the case that ordinary people or even robotics developers assume a robot must be something special, such as a showcase of state - of - the - art technologies or a dream to be pursued. In fact, however, today’s robots generally employ the same technologies as used in daily electronic appliances such as camcorders.
Even in terms of the number of sensors and
actuators and power consumption per unit weight, robotic systems do not substantially differ from automatic teller machines and washing machines. For the combination of electronic and mechanical components used in them, the robot may be regarded as an interdisciplinary technology. However, each constituent robotics technology is the same as the ones used for a purely electrical or mechanical system. Based on the awareness that robots do not consist of high technologies and other special components, researchers should seek steady progress in constituent technologies and in the performance achieved as a system.
According to Hans Moravec at Carnegie Mellon University, the current computer’s computing power per cost is 1,000 MIPS per $1,000, which is equivalent to the visual processing power of a lizard or a lower fish and is inferior to humans by about five orders of magnitude[16]. Under such circumstances, only for the reason that biped walking is most suited for robots that share the same living spaces with humans would be insufficient to justify giving a high priority to the research on humanoid robots for domestic use. Such prioritization would cause imbalances among different technologies. A more preferable development process should start with the optimal shape for a specific task, as was the case with the vacuum cleaning robot, followed by gradual evolution in shape and the addition of functions. If the development of robots is aimed at providing end users with useful equipment, emphasis should be placed on the systematic creation of systems intended for general users.
This is the most impor tant perspective in developing technologies for the household sector.
Encouraged by the robot boom in the country, the population of robotics researchers, many of them university researchers, has grown to the largest-ever level. At a time like this, failure to produce robots that can substantially benefit people as more realistic entities might mean failure to measure up to social expectations and could result in disappointment across society.
Preventing this from happening is a common challenge to all researchers in robotics.
7 Conclusion
Personal robots are completely different from industrial robots that have been supporting Japanese industry, with respect to the required technologies, expected functionality as systems, and work environment. From the technical point of view, areas that need further progress include sensor technology to generate input signals, information processing capability on the basis of input from the sensors, and smaller and refined actuator or output systems.
Because of its large share in the production of robots for the manufacturing industry, Japan is generally considered competitive in the robotics field. However, this is no longer true even of constituent technologies, as far as advanced robot technologies are concerned.
The author earlier cited two problems in current robotics research in Japan: vagueness of development objectives and target systems;
and a large gap between industry and academia in the directions of development. While private companies, the major contributor to the past com mercial ization of robots i n Japan, are being forced to concentrate their development efforts only on prospective business fields, u n iver sit y re s e a rcher s of ten st ick to t he invention of new functions that would allow them to write academic papers. At least where commercialization is concerned, Japan has yet to take advantage of the technological development capacit y i n academ i a, where va st hu m a n resources are available for robotics research thanks to the discipline’s popularity among students as a result of the promotional effects of robot contests.
In Japan, as a rapidly aging nation, a need for personal robots will certainly persist for a long time into the future. However, the personal robot market for the public sector, which is expected to serve as an engine to drive the growth of the consumer market, remains relatively small and, therefore, has not succeeded in attracting many businesses for lack of profitability in the market. An effective measure to invigorate the development of robots for the public sector is for government agencies or local public bodies
to purchase a considerable number of robotic systems or subsidize purchases of such systems as part of a promotional program.
Acknowledgements
This article was written based on research results of the National Institute of Science and Technology Policy and the lecture “Challenges and Prospects toward the Promotion of Robotics”
delivered by Dr. Masakazu Ejiri, former chairman of the Robotic Society of Japan, on July 17, 2003 at the Institute. Dr. Ejiri also provided assistance in preparing this article by offering reference material. The author would like to express his sincere thanks to Dr. Ejiri.
Notes
*1 Karel Capek (the Czech Republic, 1890-1938) was the first to use the word “robot” in his play “Rossum’s Universal Robots (R.U.R)” in 1920. The word was coined from the Czech word “robota,” which means “to be forced to work,” or from the Slovak word “robotnik,”
representing a worker, to imply “slave machinery.”
*2 Although recently there are robots that virtually operate on the Internet, known as “virtual robots,” only physically existing robots are considered in this article.
*3 In dynamic walking, the center of gravity is not always maintained within the bottom area of the supporting foot. By contrast, in static walking, the center of gravity is always somewhere within the sole area of the supporting foot.
*4 Stipulated by Article 150 of the Industrial Safety and Health Law.
*5 Reference[14] indicates that 10 domestic contests have already been held through June 2003, with an additional 25 scheduled before the end of the year (as of July 11, 2003).
*6 The count is based on the number of links to university laboratories’ websites provided by Reference[15] in the section about Robotics Research in Japan. The exact count is 96 laboratories at 38 universities as of July 2003.
References
[1] Website of ROBODEX. :
http://www.robodex.org/
[2] “Robot Handbook,” Japan Robot Association, March 2001 (in Japanese).
[3] Website of Sony Corporation. :
http://www.sony.net/Products/aibo/aiboflas h.html
[4] “Summary Report on Technology Strategy for Creating a ‘Robot Society’ in the 21st Century,” The Japan Machinery Federation, Japan Robot Association, 2000 (in Japanese).
: http://www.jara.jp/jp/07_books/Rt.pdf [5] “Report on next- generation robots in the
Kinki region,” Kansai Bureau of Economy, Trade and Industry (in Japanese). :
http://www.city.kobe.jp/cityoffice/27/kogyo u/rt/index.htm
[6] Website of Gifu Robot Project (GPR21). : http://www.stp.pref.gifu.jp/htmlstpc/grp21/
[7] Website of Kyushu Bureau of Economy, Trade and Industry on the next-generation industries and manufacturing. :
http://www.kyushu.meti.go.jp/seisaku/seizo /frame.htm
[8] Okuwada, “Trend in the Introduction and Development of Robotic Surgical Systems,”
No.10, Science & Technolog y Trends - Quarterly Review. :
http://www.nistep.go.jp/index-j.html
[9] Website of the Kawasaki Laboratory of the
Faculty of Engineering, Gifu University. : http://robo.mech.gifu-u.ac.jp/index.html [10] Eji r i a nd K i nosh it a, “Robot ics a s t he
Trans-disciplinary Science and Technology,”
Keisoku to Seig yo, Vol. 42, No. 3, pp.
209-214, March 2003 issue (in Japanese).
[11] Website of Honda Motor Co., Ltd. : http://www.honda.co.jp/robot/
[12] Handout 5 -1 of the 24th meeting of the Council for Science and Technology Policy held on January 28, 2003 (in Japanese). : http://www8.cao.go.jp/cstp/siryo/haihu24/s iryo5-1.pdf
[13] Website of tmsuk Co., Ltd. :
http://www.tmsuk.co.jp/jap/s_agent/index.h tml
[14] Website of ROBOCON Magazi ne f rom Ohmsha, Ltd (in Japanese). :
http://www.ohmsha.co.jp/robocon/
[15] Links to Robotics Research in Japan on the website of the Robotics Laboratory, Graduate School of Information Science, Nara Institute of Science and Technology. :
http://robotics.aist-nara.ac.jp/jrobres/index-j .html
[16] Website of Carnegie Mellon University Field Robotics Center. :
http://www.frc.ri.cmu.edu/_hpm/talks/revo.
slides/2030.html
(Original Japanese version: published in September 2003)
![Fig u re 2 shows a long - ter m foreca st of the robot market made by the Japan Robot Association [4]](https://thumb-ap.123doks.com/thumbv2/123deta/6926281.2265756/1.918.223.698.900.1170/fig-shows-foreca-robot-market-japan-robot-association.webp)