JAIST Repository
https://dspace.jaist.ac.jp/
Title
正規型自然観測法理論における不確定性原理の検討に関する研究
Author(s)
Wahyu, WidadaCitation
Issue Date
1997‑03Type
Thesis or DissertationText version
authorURL
http://hdl.handle.net/10119/1070Rights
Description
Supervisor:飯島 泰蔵, 情報科学研究科, 修士修 士 論 文
正規型自然観測法理論における不確定性原理 の検討に関する研究
指導教官
飯島泰蔵 教授
北陸先端科学技術大学院大学 情報科学研究科情報処理学専攻
Wahyu Widada
1997年2月14日
Copyright c
1997byWahyuWidada
要 旨
本論文では、波形の観測手法として正規型自然観測法理論を用い、不確定性原理の観点か らこの理論の検討を行なった上で、基本観測値系列を利用した瞬時波形の構造解析法を提 案する。
目 次
1 序論 1
1.1 研究の背景 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 1
1.2 研究の目的 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 1
1.3 構成 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 2
2 自然観測法理論 3
2.1 自然観測法の基礎理論 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 3
2.1.1 近接型自然観測法理論 : : : : : : : : : : : : : : : : : : : : : : : : : 3
2.1.2 平衡型自然観測法理論 : : : : : : : : : : : : : : : : : : : : : : : : : 4
2.1.3 再構成公式 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 5
2.1.4 伝達関数表現 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 5
2.2 正規型自然観測法理論 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 6
2.2.1 正規型基本観測変換 : : : : : : : : : : : : : : : : : : : : : : : : : : 7
2.2.2 再構成公式 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 7
2.2.3 正規型自然観測フィルタの特性 : : : : : : : : : : : : : : : : : : : : 8
3 正規型自然観測法理論における不確定性原理の検討 10
3.1 フーリエ変換における不確定性原理 : : : : : : : : : : : : : : : : : : : : : : 10
3.1.1 不確定性原理 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 10
3.1.2 等価時定数を用いたフーリエ変換における不確定性原理 : : : : : : 11
3.2 正規型自然観測法における大域的な不確定性原理 : : : : : : : : : : : : : : 12
3.2.1 観測次数の平均と分散 : : : : : : : : : : : : : : : : : : : : : : : : : 12
3.2.2 平均次数指標 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 13
3.2.3 等価時定数と平均次数指標との間の関係 : : : : : : : : : : : : : : : 14
3.2.4 平均次数指標と観測次数の分散との間の関係 : : : : : : : : : : : : : 14
3.2.5 大域的な特徴のシミュレーションと結果 : : : : : : : : : : : : : : : 16
3.3 正規型自然観測法における瞬時的な不確定性原理 : : : : : : : : : : : : : : 18
3.3.1 瞬時的な計算方法 : : : : : : : : : : : : : : : : : : : : : : : : : : : : 18
3.3.2 観測次数の瞬時平均と瞬時分散 : : : : : : : : : : : : : : : : : : : : 18
3.3.3 観測波形の瞬時変化の傾向fg に関する瞬時特徴の検討 : : : : : : 19
3.3.4 瞬時的な特徴のシミュレーションと結果 : : : : : : : : : : : : : : : 21
3.4 考察 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 24
3.4.1 大域的な不確定性についての考察 : : : : : : : : : : : : : : : : : : : 24
3.4.2 瞬時的な不確定性についての考察 : : : : : : : : : : : : : : : : : : : 24
3.5 本章のまとめ : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 26
4 正規型自然観測法による瞬時波形の構造解析 27
4.1 基本観測値系列からのモーメント波形 : : : : : : : : : : : : : : : : : : : : 27
4.2 瞬時波形の構造解析推定法 : : : : : : : : : : : : : : : : : : : : : : : : : : : 28
4.3 瞬時構造解析のシミュレーション : : : : : : : : : : : : : : : : : : : : : : : 32
4.3.1 周波数が一定の場合 : : : : : : : : : : : : : : : : : : : : : : : : : 32
4.3.2 考察 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 38
4.3.3 周波数が変化する場合 : : : : : : : : : : : : : : : : : : : : : : : : : 41
4.3.4 考察 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 47
4.4 本章のまとめ : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 50
5 おわりに 52
5.1 結論 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 52
5.2 今後の課題 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 52
図 索 引
2.1 0(p)の周波数特性 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 6
2.2 3(p)の周波数特性 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 6
2.3 M位正規型自然観測フィルタ : : : : : : : : : : : : : : : : : : : : : : : : : 8
2.4 M位正規型自然観測フィルタの振幅特性と位相特性 : : : : : : : : : : : : : 9
3.1 ( t
s )
2 と平均 m と間の関係 : : : : : : : : : : : : : : : : : : : : : : : : : : 16
3.2 ( t
s )
2 と平均 m と間の関係 : : : : : : : : : : : : : : : : : : : : : : : : : : 17
3.3 ( t
s )
2 と (4m
M )
2 と間の関係: : : : : : : : : : : : : : : : : : : : : : : : : : : 17
3.4 観測次数の瞬時的な平均値m(t) : : : : : : : : : : : : : : : : : : : : : : : : 21
3.5 観測次数の瞬時的な分散(4m)2
(t)
: : : : : : : : : : : : : : : : : : : : : : : 22
3.6 瞬時的平均値m(t)
; s =021 の場合 : : : : : : : : : : : : : : : : : : : 23
3.7 瞬時的分散(4m)2
(t)
; s=021 の場合 : : : : : : : : : : : : : : : : : : 24
3.8 大域的と瞬時的な平均値 : : : : : : : : : : : : : : : : : : : : : : : : : : : : 25
3.9 大域的と瞬時的な分散 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 25
4.1 自然観測法による瞬時構造解析 : : : : : : : : : : : : : : : : : : : : : : : : 30
4.2 入力波形f0
(t) : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 33
4.3 波形hl
(t);l=0、(M =3) : : : : : : : : : : : : : : : : : : : : : : : : : : : 33
4.4 波形hl(t);l =1、(M =3) : : : : : : : : : : : : : : : : : : : : : : : : : : : 34
4.5 波形hl(t);l=2、(M =3) : : : : : : : : : : : : : : : : : : : : : : : : : : : 34
4.6 波形hl(t);l=3、(M =3) : : : : : : : : : : : : : : : : : : : : : : : : : : : 34
4.7 波形hl(t);l=4、(M =8) : : : : : : : : : : : : : : : : : : : : : : : : : : : 34
4.8 波形hl(t);l =5、(M =8) : : : : : : : : : : : : : : : : : : : : : : : : : : : 34
4.9 波形hl(t);l=6、(M =8) : : : : : : : : : : : : : : : : : : : : : : : : : : : 34
4.10 波形hl(t);l=7、(M =8) : : : : : : : : : : : : : : : : : : : : : : : : : : : 35
4.11 波形hl(t);l=8、(M =8) : : : : : : : : : : : : : : : : : : : : : : : : : : : 35
4.12 p
1 (t
0 );p
2 (t
0
) : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 35
4.13 角周波数!(t0) : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 35
4.14 変化する様相(t0
) : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 35
4.15 成分の強度C(t0
) : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 35
4.16 位相角 (t0
) : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 36
4.17 瞬時構造解析ft0
=1g、M =3 : : : : : : : : : : : : : : : : : : : : : : : : 37
4.18 瞬時構造解析ft0
=2g、M =3 : : : : : : : : : : : : : : : : : : : : : : : : 37
4.19 瞬時構造解析ft0
=3g、M =3 : : : : : : : : : : : : : : : : : : : : : : : : 37
4.20 瞬時構造解析ft0
=4g、M =3 : : : : : : : : : : : : : : : : : : : : : : : : 37
4.21 フーリエ解析法t0 =2:5秒 : : : : : : : : : : : : : : : : : : : : : : : : : : : 38
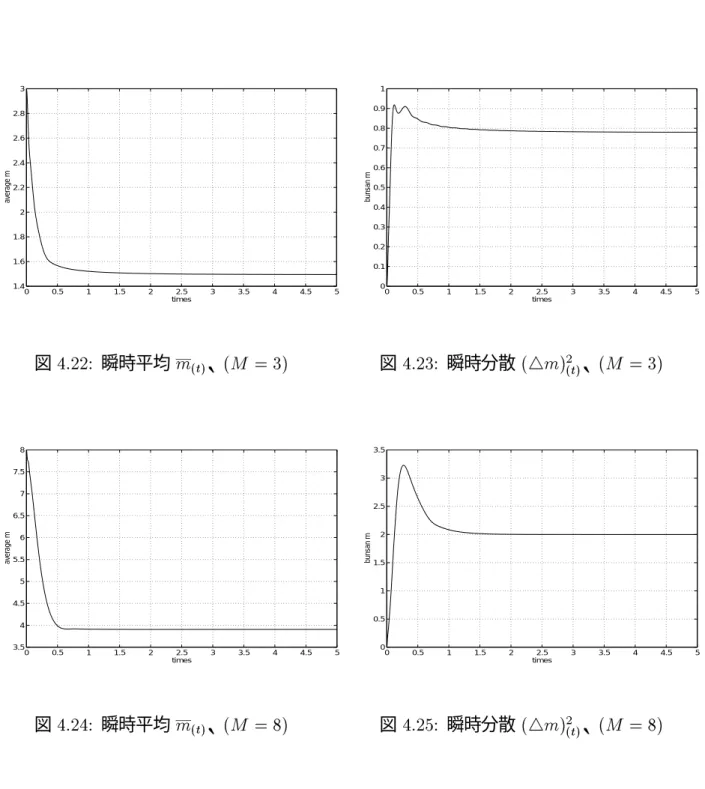
4.22 瞬時平均m(t)、(M =3) : : : : : : : : : : : : : : : : : : : : : : : : : : : : 39
4.23 瞬時分散(4m)2(t)、(M =3) : : : : : : : : : : : : : : : : : : : : : : : : : : 39
4.24 瞬時平均m(t)、(M =8) : : : : : : : : : : : : : : : : : : : : : : : : : : : : 39
4.25 瞬時分散(4m)2
(t)
、(M =8) : : : : : : : : : : : : : : : : : : : : : : : : : : 39
4.26 基本観測値系列のパワー成分、(M =3): : : : : : : : : : : : : : : : : : : : 40
4.27 基本観測値系列のパワー成分、(M =8): : : : : : : : : : : : : : : : : : : : 41
4.28 入力波形f0
(t) : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 42
4.29 波形hl
(t);l =0、(M =3) : : : : : : : : : : : : : : : : : : : : : : : : : : : 42
4.30 波形hl(t);l =1、(M =3) : : : : : : : : : : : : : : : : : : : : : : : : : : : 43
4.31 波形hl(t);l =2、(M =3) : : : : : : : : : : : : : : : : : : : : : : : : : : : 43
4.32 波形hl(t);l =3、(M =3) : : : : : : : : : : : : : : : : : : : : : : : : : : : 43
4.33 波形hl(t);l =4、(M =8) : : : : : : : : : : : : : : : : : : : : : : : : : : : 43
4.34 波形hl(t);l =5、(M =8) : : : : : : : : : : : : : : : : : : : : : : : : : : : 43
4.35 波形hl(t);l =6、(M =8) : : : : : : : : : : : : : : : : : : : : : : : : : : : 43
4.36 波形hl(t);l =7、(M =8) : : : : : : : : : : : : : : : : : : : : : : : : : : : 44
4.37 波形hl(t);l =8、(M =8) : : : : : : : : : : : : : : : : : : : : : : : : : : : 44
4.38 p
1 (t
0 );p
2 (t
0
) : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 44
4.39 角周波数!(t0
) : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 44
4.40 変化する様相(t0) : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 44
4.41 成分の強度C(t0) : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 44
4.42 位相角 (t0) : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 45
4.43 瞬時構造解析ft0 =1g、M =3 : : : : : : : : : : : : : : : : : : : : : : : : 45
4.44 瞬時構造解析ft0
=2g、M =3 : : : : : : : : : : : : : : : : : : : : : : : : 45
4.45 瞬時構造解析ft0
=3g、M =3 : : : : : : : : : : : : : : : : : : : : : : : : 46
4.46 瞬時構造解析ft0
=4g、M =3 : : : : : : : : : : : : : : : : : : : : : : : : 46
4.47 フーリエ解析法t0
=2:5 : : : : : : : : : : : : : : : : : : : : : : : : : : : : 47
4.48 フーリエ解析法t0
=1 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 48
4.49 フーリエ解析法t0
=2 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 48
4.50 フーリエ解析法t0
=3 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 48
4.51 フーリエ解析法t0 =4 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 48
4.52 瞬時平均m(t)、(M =3) : : : : : : : : : : : : : : : : : : : : : : : : : : : : 49
4.53 瞬時分散(4m)2(t)、(M =3) : : : : : : : : : : : : : : : : : : : : : : : : : : 49
4.54 瞬時平均m(t)、(M =8) : : : : : : : : : : : : : : : : : : : : : : : : : : : : 50
4.55 瞬時分散(4m)2
(t)
、(M =8) : : : : : : : : : : : : : : : : : : : : : : : : : : 50
4.56 基本観測値系列のパワー成分、(M =3): : : : : : : : : : : : : : : : : : : : 51
4.57 基本観測値系列のパワー成分、(M =8): : : : : : : : : : : : : : : : : : : : 51
5.1 瞬時的な平均値m(t)
: : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 60
5.2 瞬時的な分散(4m)2
(t)
: : : : : : : : : : : : : : : : : : : : : : : : : : : : : 60
表 索 引
4.1 時刻t=t0 の各瞬時パラメータ : : : : : : : : : : : : : : : : : : : : : : : : 36
4.2 大域的な平均m と分散(4m)2 : : : : : : : : : : : : : : : : : : : : : : : : 39
4.3 時刻t=t0 の各瞬時パラメータ : : : : : : : : : : : : : : : : : : : : : : : : 46
4.4 大域的な平均m と分散(4m)2 : : : : : : : : : : : : : : : : : : : : : : : : 49
第
1章 序論
1.1
研究の背景
一般に、時間波形の解析法として、本来時間軸上の関数で記述される波形を周波数軸上 で取り扱うために、これまで主にフーリエ解析法などが用いられてきた。しかし、これ らの手法は波形の定常性を仮定し過去から未来まで全てを熟知しなければならない。そ のため、便宜的にrunningspectrumといった概念を採用するといった不合理な問題を内 在している。 この不合理性を排除する手法として飯島教授により自然観測法が提唱され
た[1]{[11]。自然観測法理論では、自然観測の条件に従って波形を観測することによって、
合理的な波形観測理論の構築を目指したものである。この理論では、原始関数と呼ばれる 関数を用いた、数学的に完全な波形観測システムとして構築された。自然観測法には近接 型、平衡型、正規型の3種類が存在する。自然観測法理論は、波形の定常性を仮定する必 要がなく、瞬時波形の解析が可能である。また自然観測法は、基本観測値系列と呼ばれる 関数列の総和として、原波形を完全再現する特徴がある。本研究は正規型自然観測法理論 における変換特性について、基礎的な検討を行なったものである。
1.2
研究の目的
本研究の目的は、不確定性原理という視点から正規型自然観測法による波形観測変換の 特徴を検討することに在る。具体的には、波形を自然観測変換によって基本観測値系列と して表わしたとき、この系列の中に波形がどのように分布しているのかを明らかにするこ
とである。また、この結果を踏まえて基本観測値系列を用いた、短時間における波形の構 造解析法の提案を行なった。
1.3
構成
本論文の構成は次に示す通り。まず2章で波形の観測手法である自然観測フィルタにつ いて解説を行なう。自然観測法の基礎理論から近接型、平衡型について解説し、本研究に 用いた正規型への展開とその特性を述べる。3章では正規型自然観測法による波形観測に おける不確定性原理について解説する。実際の数値計算を行ない、傾向や特性を明らか にする。4章では正規型自然観測法による波形構造解析法を示し、その特徴を数値計算に よって明らかにする。
第
2章
自然観測法理論
本章では飯島教授により提唱された自然観測法理論、特にその理論を基礎とした自然観 測フィルタに関して解説する。
波形の瞬時構造を数学的に解析する目的で、飯島教授により自然観測法理論が提案され た。また、自然観測フィルタは自然観測法理論を基礎として理論展開されたものである。
自然観測法は、近接型、平衡型、正規型の三種類があるが、本研究では正規型自然観測法 理論を使用している。
2.1
自然観測法の基礎理論
自然観測法では、
lim
T!1 1
2T Z
T
0T jf(t)j
2
dt<1 (2.1)
なる条件を満たす波形f(t) を観測の対象とする。
2.1.1
近接型自然観測法理論
式(2.1)を満たす波形f(t) を時刻t で観測して得た観測波形をA0(t) とすれば、この
ときの観測誤差 "0(t) は、
f(t)0A
0
(t)="
0
(t) (2.2)
で表されることになる。そこで2つの条件、
f(t)0 ならば A0(t)0 ; (2.3)
"
0
(t)=s d
dt A
0
(t); s>0 (2.4)
を仮定する。式(2.3)は波形f(t)が恒等的に零ならば、その観測値も恒等的に零であるこ とを意味している。 式(2.4)は観測値の変化が観測誤差に比例する関係を示しているが、
比例定数sが正であるということは、観測値が常に観測誤差の絶対値を減少させる方向に 変化することを意味している。つまり、観測波形A0(t) が波形 f(t) に追従して近接しよ うとする傾向を表している。ここで式(2.2)と式(2.4) から"0(t) を消去すれば、
s d
dt +1
!
A
0
(t)=f(t) ; (2.5)
なる常微分方程式が得られるから、これを式(2.3)なる条件の下に解くことにすれば、a0(t) の値が一意的に定まって、
A
0 (t)=
1
s Z
1
0 e
0=s
f(t0)d (2.6)
となる。この式を近接型自然観測の原始形式と言う。ここで観測を逐次繰り返すと、
A
m (t)=
d
dt Z
1
0 e
0=s
A
m01
(t0)d (m=1;2;:::) (2.7)
なる観測値の系列が得られる。
2.1.2
平衡型自然観測法理論
今度は、波形 f(t) の傾き d
dt
f(t) を時刻 t で観測して得た観測波形を d
dt B
0
(t) とすれ ば、このときの観測誤差"0(t) は、
d
dt
f(t)0 d
dt B
0
(t)="
0
(t) (2.8)
と表されることになる。そこで2つの条件、
f(t)定数 ならば B0(t)0 ; (2.9)
"
0 (t)=
1
s B
0
(t); s>0 (2.10)
を仮定する。式(2.9)は波形f(t)が恒等的に一定ならば、その観測波形b0(t) は恒等的に 零であることを意味している。式(2.10)は観測誤差"0(t) の値が観測波形B0(t) に比例す る関係を表している。つまり、観測波形B0(t)が波形f(t) の変化によって励起されるが、
常にその平衡点である零を保とうとする傾向を表している。ここで、式(2.8)と式(2.10) から"0
(t)を消去すれば、
s d
dt +1
!
B
0
(t)=s d
dt
f(t) (2.11)
なる常微分方程式が得られるから、これを式(2.9)なる条件の下に解くことにすれば、B0(t) の値が一意的に定まって、
B
0 (t)=
d
dt Z
1
0 e
0=s
f(t0)d (2.12)
となる。この式を平衡型の自然観測の原始形式と言う。ここで観測を逐次繰り返すと、
B
m (t)=
Z
1
0 1
s e
0=s
B
m01
(t0)d (m=1;2;:::) (2.13)
なる観測値の系列が得られる。
式(2.6)式(2.7)で表される観測値の系列を近接型基本観測値系列、式(2.12)式(2.13) で表される観測値を平衡型基本観測値系列と呼ぶ。
2.1.3
再構成公式
近接型と平衡型の基本観測値系列を逆変換すると、
f(t)= 1
X
m=0 A
m
(t;s) (2.14)
f(t)= 1
X
m=0 B
m
(t;s) (2.15)
式(2.14)と式(2.15)のように原波形を再構することが出来る。
2.1.4
伝達関数表現
2つの観測形式から得られる式(2.6)と式(2.12)をLaplace変換すると、
A
0
(p;s)= 1
1+sp
F(p) (2.16)
B
0
(p;s)=
1+sp
F(p) (2.17)
となる。ただし、pはLaplace変換の変数で、s は自然観測パラメータ、F(p) はf(t) の ラプラス変換表示である。ここで式(2.16)の伝達関数を0(p)、式(2.17)の伝達関数を3(p) とおくと、
0(p) = 1
1+sp
(2.18)
3(p) = sp
1+sp
(2.19)
となる。それぞれ、cuto周波数が 1
2s
[Hz]の低域通過フィルタおよび高域通過フィルタ を表している。図2.1,図2.2に0(p) および3(p)の周波数特性を示す。だたしcuto周波 数は1 [kHz] である。
10 1 10 2 10 3 10 4
−20
−15
−10
−5 0
Amplitude [s=1/(2pi*1000)]
Gain [dB]
Frequency [Hz]
図2.1: 0(p)の周波数特性
10 1 10 2 10 3 10 4
−40
−35
−30
−25
−20
−15
−10
−5 0
Amplitude [s=1/(2pi*1000)]
Gain [dB]
Frequency [Hz]
図2.2: 3(p)の周波数特性
2.2
正規型自然観測法理論
これまでに波形の観測形式には近接型と平衡型とよばれる2つの理論体系に大別されて いることを述べた。この両型の観測系は相互に無関係ではなく、密接な表裏の関係を保っ ている[9]。ここでは近接型および平衡型の特性を生かし、有限個の観測値で原波形の特 徴を表現することのできる正規型自然観測フィルタについて説明する[11][12]。
2.2.1
正規型基本観測変換
自然観測フィルタを構成する2つの観測変換0と3は、それぞれ次のように定義するこ とができた。
(0f)(t)= Z
1
0 1
s e
0=s
f(t0)d (2.20)
(3f)(t)= d
dt Z
1
0 e
0=s
f(t0)d (2.21)
そうすれば両作用素の間には、
0+3 =I (Iは恒等作用素) (2.22) なる関係が成り立つことが既に示されている [9]。観測位数をM とした正規型基本観測 変換(正規型基本観測作用素)を、
X (M)
m
=3 m
0 M0m
(m=0;1;111;M) (2.23)
のように新たに定義すれば、
M
X
m=0 M
m
!
X (M)
m
=I (2.24)
が成り立つことになる。
2.2.2
再構成公式
また任意の波形f(t)に対してXm(M) なる作用素で表されるフィルタを用いて観測した 系列を、
n (M)
m
(t) = (X (M)
m
f)(t) (m=0;1;111;M) (2.25)
と表し、これを自然観測フィルタと呼ぶ。このとき式(2.24)によって、
f(t)= M
X
m=0 M
m
!
n (M)
m
(t) (2.26)
なる波形の再構成式が得られる。
ここで式(2.25)は正規型理論を用いた波形の変換式であり、得られた観測値の系列を
正規型基本観測値系列と呼ぶ。このときの正規型自然観測フィルタのブロック図を図2.3 に示す。
n (t)
f(t)
n (t)
n (t)
n (t)
n (t)
0
1
M-2
M-1
M (M) (M) (M) (M)
Γ Γ (M)
Γ Γ
Γ Γ
Γ
Γ Γ
Γ Λ
Λ Λ
Λ
Λ Λ Λ
Λ Λ
Λ
図2.3: M位正規型自然観測フィルタ
2.2.3
正規型自然観測フィルタの特性
正規型自然観測フィルタの伝達関数Xm(M)
(p) は、式(2.23)によって
X (M)
m
(p) =
(sp) m
(1+sp) M
(m=0;1;111;M) (2.27)
となる。その振幅特性と位相特性はそれぞれ
jX (M)
m
(i!)j=
j!sj m
(1+! 2
s 2
) M=2
(2.28)
6
X M
m
=m=20M (但し =arctan(s!)) (2.29)
で与えられる。そこで位数M = 8 、cuto周波数 1
2s
=1 [kHz] とした場合の正規型
自然観測フィルタの周波数特性を図2.4に示す。この図からフィルタX0(M) は低域通過、
フィルタ XM(M) は高域通過、それ以外のフィルタは帯域通過フィルタである。またこの フィルタ群は、cuto周波数fc= 1
2 s
で対数軸上で対称となっていることも分かる。
10 1 10 2 10 3 10 4 10 5
0 0.5 1
m=0 m=M
Normal Filter [M: 8 s:1/(2pi*1000)]
Gain [dB]
10 1 10 2 10 3 10 4 10 5
−20
−10 0 10 20
m=M
m=0
Phase [rad]
Frequency [Hz]
図2.4: M位正規型自然観測フィルタの振幅特性と位相特性
第
3章
正規型自然観測法理論における不確定性原 理の検討
前章では、正規型自然観測フィルタの構成とその特性について述べた。本章では、波形 を自然観測フィルタによって正規型基本観測値系列として表したとき、この系列の中に観 測波形がどのように分布しているのかを明らかにする。これは正規型自然観測法理論にお ける不確定性原理と言えるものであり、大域的と瞬時的な特性の検討を行なった。
3.1
フーリエ変換における不確定性原理
不確定性原理は二つの物理量それぞれを確率変数としてを捉え、それらの分散の積を 計算したときに、その値が一定値未満に成り得ないことを示すものである。この理論は最 初、量子力学の分野において、ド イツのW.Heisenb erg(1927) によって提唱された。その 後、他の分野においてもこの原理が展開されて来た。その一つは波形解析としてのフーリ エ変換である。
3.1.1
不確定性原理
この理論は、フーリエ変換の場面では時間軸t 上における波形の分散(4t)2 と角周波 数軸! 上における波形の分散(4!)2 の積の値に対して
(4t) 2
(4!) 2
1
4
(3.1)
なる関係式が成り立っている、と言うものである。これはフーリエ変換における不確定性 原理と呼ばれている。この式によって分散 (4t)2 と分散(4!)2 の積の最小値が1/4で ある。次の節では、等価時定数を新たに導入することによって不確定性原理の式を表現 する。
3.1.2
等価時定数を用いたフーリエ変換における不確定性原理
まず、波形f(t) に対して
(t) 2
= Z
1
01 f(t)
2
dt
Z
1
01 ff
0
(t)g 2
dt
(3.2)
なる量を「等価時定数」と呼ぶ。等価時定数は瞬時的な時定数を波形の傾きの大きい所に 重みをつけて平均したものである。パーセバルの等式を用いれば式(3.2)は
(t) 2
= Z
1
01
jF(i!)j 2
d!
Z
1
01
! 2
jF(i!)j 2
d!
(3.3)
と表すことができる。一方フーリエ変換の角周波数軸! 上における波形の分散(4!)2 を 求めれば
(4!) 2
= Z
1
01
! 2
jF(i!)j 2
d!
Z
1
01
jF(i!)j 2
d!
(3.4)
である。そして、波形の分散(4!)2 と等価時定数の間の関係は式(3.3)と式(3.4)から
(4!) 2
= 1
(t) 2
(3.5)
となる。この結果を用いて式(3.1)によって表されたフーリエ変換における不確定性原理 を等価時定数に着目して表現すれば、
8
>
>
>
>
<
>
>
>
>
: (4t)
2
1
4 (t)
2
(4!) 2
(t) 2
=1
(3.6)
と表される。この表現式によれば、(4t)2 の最小値が等価時定数の 1
4 (t)
2 で与えられ、
(4!)
2 は(t)2 の逆数となっていることを示している。この表現式は従来の不確定性原理
の表現式をより細かく表現できる。つまり、(4t)2、と(4!)2 との積には最小値が存在さ れるトレードオフの関係にあることは従来から知られたが、そのトレードオフの本質な部 分は (t)2 と (!)2 との関係に成り立つ、逆比例関係であることが明確に表現されている のである。
3.2
正規型自然観測法における大域的な不確定性原理
本節では、観測した入力波形の基本観測値系列における広がり特性について不確定原理 と言う観点から明らかにする。
3.2.1
観測次数の平均と分散
まず、入力波形f(t) に関する基本観測値系列をfn(M)m
(t)gとすれば、
f(t)= M
X
m=0 M
m
!
n (M)
m
(t) (3.7)
が成り立つ。そして、入力波形f(t)のノルムkfkを
kfk 2
= Z
1
01 f(t)
2
dt (3.8)
で定義すれば、
kfk 2
= M
X
m=0 M
m
!
kn (M)
m k
2
(3.9)
が成り立つ。式(3.9)を右辺のf(t) のフーリエ変換F(!)で表すと、
M
X
m=0 M
m
!
kn (M)
m k
2
= 1
2 Z
1
01 M
X
m=0 M
m
!
! 2
s 2
(1+! 2
s 2
) jF(!)j
2
d!
= 1
2 Z
1
01
jF(!)j 2
d! (3.10)
である。そこで、基本観測値系列fn(Mm )
(t)g に対して、そのノルムの二乗の分布に対する 観測次数m の平均値m を
m= M
X
m=0 m
M
m
!
kn (M)
m k
2
M
X
m=0 M
m
!
kn (M)
m k
2
(3:11)
で定義する。この値は
m=M Z
1
01
! 2
s 2
1+! 2
s 2
jF(!)j 2
d!
Z
1
01
jF(!)j 2
d!
(3.12)
と表せる。次に観測次数の分散(4m)2 を
(4m) 2
= M
X
m=0
(m0m) 2
M
m
!
kn (M)
m k
2
M
X
m=0 M
m
!
kn (M)
m k
2
(3.13)
(3.14)
で定義する。ここで分散は
(4m) 2
= m
2
0(m) 2
(3.15)
のようにも表せることに着目し、その値を計算することにする。m2 の値を計算すると
m 2
=M Z
1
01
! 2
s 2
1+! 2
s 2
jF(!)j 2
d!
Z
1
01
jF(!)j 2
d!
+M 2
Z
1
01
! 2
s 2
1+! 2
s 2
jF(!)j 2
d!
Z
1
01
jF(!)j 2
d!
(3.16)
である。よって分散(4m)2 の値が式(3.12) と式(3.16)を用いることによって
(4m) 2
= M
2 (
Z
1
01
! 4
s 4
(1+! 2
s 2
) 2
jF(!)j 2
d!:
Z
1
01
jF(!)j 2
d!0 Z
1
01
! 2
s 2
(1+! 2
s 2
) jF(!)j
2
d!
)
Z
1
01
jF(!)j 2
d!
2
+ M
(
Z
1
01
! 2
s 2
(1+! 2
s 2
)
jF(!)j 2
d!:
Z
1
01
jF(!)j 2
d!
)
Z
1
01
jF(!)j 2
d!
2
(3.17)
と求められる。
3.2.2
平均次数指標
観測位数M の仲介量に関して規格化された m として
L= m
M 0m
(3.18)
なる量を定義し、「平均次数指標」と呼ぶことにする。L の値は m M=2 のとき 0
L1、mM=2のとき L1 となる。この値は式(3.11)を用いると
L= Z
1
01
! 2
s 2
1+! 2
s 2
jF(!)j 2
d!
Z
1
01 1
1+! 2
s 2
jF(!)j 2
d!
(3.19)
となる。以降では、平均次数指標を仲介量として、等価時定数と観測次数の分散との間の 関係を明らかにするとしている。
3.2.3
等価時定数と平均次数指標との間の関係
L
2 と (t)2 との間の関係は次のいずれかである。
もし s2
( t) 2
1 ならば
0L 2
s
2
(t) 2
1 (3.20)
である。
もし s2
( t) 2
L
2 ならば
1 s
2
(t) 2
L 2
(3.21)
である。
3.2.4
平均次数指標と観測次数の分散との間の関係
平均次数指標と観測次数の分散との間の関係を明らかにするために
(4m) 2
m(M 0m)
(3:22)
なる量を考える。いまA と B を
A= (
Z
1
01
! 4
s 4
(1+! 2
s 2
)2
jF(!)j 2
d!:
Z
1
01
jF(!)j 2
d!0 Z
1
01
! 2
s 2
(1+! 2
s 2
)
jF(!)j 2
d!
)
(
Z
1
01
! 2
s 2
(1+! 2
s 2
)
jF(!)j 2
d!:
Z
1
01 1
(1+! 2
s 2
)
jF(!)j 2
d!
)
(3.23)
B =
Z
1
01
! 2
s 2
(1+! 2
s 2
) jF(!)j
2
d!:
Z
1
01
jF(!)j 2
d!
(
Z
1
01
! 2
s 2
(1+! 2
s 2
)
jF(!)j 2
d!:
Z
1
01 1
(1+! 2
s 2
)
jF(!)j 2
d!
)
(3.24)
とすれば、式(3.22)は式(3.12)、(3.17)から
(4m) 2
m(M 0m)
=A+ B
M
(3:25)
と表せる。また、式(3.23),(3.24)との間に
8
>
<
>
:
A =10B
A 0; B >0
(3:26)
なる関係が成り立つ。そして式(3.18)と式(3.22) から
(4m) 2
m(M 0m)
= 4m
M
!
2
(L+1) 2
L
(3:27)
なる関係が判明する。また、式(3.25)と式(3.27)から(4m)2 とL の間には
4m
M
!
2
=
L
(L+1) 2
(A+ 1
M B)
=
10
M 01
M B
L
(L+1) 2
(3.28)
なる関係が成り立つ。
以上、式(3.20),(3.21)と式(3.28)から正規型自然観測値系列の特徴を等価時定数と観
測次数の分散との間の関係がまとめると、以下のようになる。
( t
s )
2
!1のとき、L!0となるので、観測次数の平均値m=0になる。このとき 観測次数の分散は(4m)2 =0 となる。
L ! 1 のとき、( t
s )
2
1 となる。このとき観測次数の平均・分散は m = M 、
(4m) 2
=0 となる。
0<( t
s )
2
<1のとき、(t
s )
2 の減少に従って、観測次数の平均値m が増加するが、
観測次数の分散 (4m)2 は単調に増加してから途中で減少に変わる。
以上で得られた等価時定数と観測次数の分散の関係を図3.1 のように示す。これは知ら れていた不確定性原理とは異なる性質であり、正規型基本観測値系列における広がり特徴 を表している。