1.
「小型超音速実験機 (ロケット実験機) 飛行実験データ解析完了報告」発行にあたって
1 2.次世代超音速機技術研究開発の概要
···坂田公夫,大貫 武
23.
ロケット実験機の飛行実験に関する成果報告
(1)ロケット実験機の飛行実験技術
···町田 茂
25(2)ロケット実験機の空力設計概要
···吉田憲司
45(3)ロケット実験機の空力に関する飛行実験データ解析結果
①飛行実験による空力設計コンセプトの検証
···郭 東潤
73②飛行実験における力及び圧力特性解析
···郭 東潤
92③飛行実験における
CFD解析
···石川敬掲
112④飛行実験における遷移解析
···徳川直子
136(4)ロケット実験機の空力データベース概要
···郭 東潤
162(5)小型超音速実験機第2回飛行実験時の空力弾性応答について
···齊藤健一,町田 茂
1864.
ジェット実験機の基本設計について
···村上 哲
189 5.対外発表、論文等の総括
···大貫 武
2056.
今後の JAXA 航空における研究開発計画の紹介
(1)静粛超音速研究機の研究開発の概要
···村上 哲
209(2)静粛超音速研究機の空力設計の概要
···牧野好和
221「小型超音速実験機 (ロケット実験機) 飛行実験データ解析完了報告」発行にあたって
宇宙航空研究開発機構 航空プログラムグループが推進している次世代超音速機技術の研究 開発の一環として実施した小型超音速実験機 (ロケット実験機;NEXST-1)の飛行実験データの 解析が完了した.また,小型超音速実験機の空力設計技術を広く提供し,日本における航空機 の 設 計 開 発 技 術 の 向 上 お よ び 研 究 の 発 展 に 貢 献 す る た め の デ ー タ ベ ー ス 「 NEXST-DB
(http://nexstdb.chofu.jaxa.jp)」が完成した.そこで,2008 年 7 月 10 日,社団法人日本航 空宇宙学会との共催で, 「小型超音速実験機 (ロケット実験機) 飛行実験データ解析完了報告会」
を開催した.
本特別資料は,データ解析完了報告会にあたって作成した講演論文と,当日のプレゼンテー
ション資料をまとめ,また空力弾性解析の結果を加えたものである.講演論文には飛行実験や
データ解析結果が詳細に記述されているが,一部のデータはプレゼンテーション資料に更新さ
れているので,あわせて参照して頂きたい.
次世代超音速機技術研究開発の概要
○������� �(宇宙航空研究開発機構)
National Experimental Supersonic Transport (NEXST) Project Kimio Sakata and Takeshi Ohnuki (JAXA)
Key Words : SST, Flight Experiment, CFD Abstract
National Experimental Supersonic Transport (NEXST) Project was commenced in 1997 and was finalized with the successful flight experiment in 2005. A scaled supersonic aircraft was developed to verify the aerodynamic design technology using Computational Fluid Dynamics (CFD) method. It showed that it would be expected more than 10%
improvement in aerodynamic efficiency compared with the Concord technology.
1�は�めに
航空宇宙技術研究所(宇宙開発事業団、宇宙科学 研究所と合併し、現在は宇宙航空研究開発機構:
Japan Aerospace Exploration Agency: JAXA)は、
1997年(平 成
9年)に「次世代超音速機技術研究開発」プロジェ クトに着手した。当時、英国とフランスの共同開発 による超音速旅客機コンコルドが、唯一商用運航し ていたものの、多くの課題を抱えたまま運航を続け ており、
2003年(平成
15年)に引退した。次の世代 の超音速旅客機の開発に向けては、
80年代から米国 の
HSR計画を中心とする調査、研究計画が開始され ていたが、
1999年(平成
11年)をもって
HSR計画は 中断された。しかしながら、フェーズ
Iの検討の結果、
特に離着陸時の低騒音化技術、低
NOX化技術、低ソ ニックブーム化技術などの環境適合性技術、および、
高揚抗比技術、軽量化技術などの高効率化技術が重 要とされ、現在も
PARTNERプログラム
(Partnership for Air Transportation Noise and Emissions Reduction)な どにおいてソニックブームなどの環境性適合技術の 研究が継続的に行われている。
本報告は、本研究開発の概要を述べるとともに、
今回の「小型超音速実験機(ロケット実験機)飛行 実験データ解析完了報告会」の趣旨に触れ、本研究 開発の成果、およびその評価について総括するもの である。
2�次世代超音速機技術の研究開発 2-1 全体の概要
本研究開発は、科学技術庁航空電子等技術審議会
(当時
)の
18号答申および「小型実験機研究会報告」に 基づいて開始された。
1994年(平成
6年)の航空電子 等技術審議会第
18号答申では、「(前略)
21世紀に 向けて我が国が取り組むべき重要な技術分野は、シ ステム統合技術、高速航空機技術、安全性・環境適
合性技術、飛行実証技術の
4本柱」と述べられ、シス テム統合、高速航空機、飛行実証などの技術目標が、
本計画の基盤となっている。さらにこれを受けた
1996年(平成
8年)の「小型実験機研究会報告」では、
「我が国が限られた資金及び関連する高度な技術基 盤を有効に活用して、次世代超音速機技術の研究を 効果的に推進する方策として、我が国が得意とする
CFD空力設計技術等を活用した超音速実験機の開発 を提案する。」とされ、図
1に示す技術課題のうち、
CFD
空力設計技術の確立を柱とする「次世代超音速 機技術研究開発」プロジェクトの進め方が具体化さ れた。
本研究開発計画は実験機開発・飛行実験、要素技 術研究および設備整備からなり、実験機としてロケ ット打上げ型の無人無推力実験機(ロケット実験機 と呼称)とジェットエンジンを搭載した無人実験機
(ジェット実験機と呼称)の
2種類を開発し、航空機 システム技術と
CFDを中核とする新しい設計技術を 実証することを目的としている。実験機開発は
1997年度(平成
9年度)に着手した。また、要素技術研究 は、実験機には採用されない需要技術として、空力、
構造、推進、制御の各分野の研究を進めた。
ロケット実験機の第
1回飛行実験は、
2002年(平成
14年)
7月
14日に実施したが、ロケット制御コンピュ ータ周辺の回路に不具合があり、実験は失敗した。
直ちに、原因調査委員会が設けられ、それに続く対 策検討委員会での審議を経て、原因とその背景、施 すべき対策の基本方針が明らかとなった。その後、
文部科学省科学技術・学術審議会研究計画・評価分
科会航空委員会において本研究開発計画の中間評価
が行われ、ロケット実験機に関しては対策検討委員
会の提言に従い、適切な改修を施した後、飛行実験
を再開することとした。
図1 次世代超音速機の技術課題
2-2 ロケット実験機の概要
ロケット実験機の開発は、逆問題設計手法の実証 を主目的とする。逆問題は、具体的に定めた設計目 標値を実現する形状を計算機利用で設計する技術で あるが、本研究開発においては粘性抵抗を低減し、
高揚抗比を実現する主翼の層流化を採用した。具体 的には主翼上面流を層流化させるための翼胴結合を 含めた主翼の圧力分布の目標値を実現するキャンバ ー及び翼厚分布を求めることである。また、実験機 の設計に際しては、主翼上面への自然層流翼の適用 のほか、主翼の設計にワープを施したこと、平面形 をアロー翼としたこと、および胴体形状にエリアル ールを適用したことなどの空力設計の概念を適用し た。この効果の検証には高精度の飛行実験データが 必要と考え、力学的に慣性力と重力および空力抵抗 とで成り立つ単純な力学条件を考慮し、実験機は推 進力のない、いわゆる超音速機の無人グライダー形 態とした(図2)。
図2 ロケット実験機および空力設計概念
2-3 ジェット実験機計画
ジェット実験機の設計においては、逆問題空力設 計手法を発展させ最適化手法を取り入れた、逆問題
・最適化設計技術を開発、適用した。エンジン搭載 部の複雑流れを計算機設計に取り込むことを中心に、
最適化の手法を導入した。また、フライングテスト ベッド(
FTB)として複合材構造技術およびインテー クなどの推進技術の一部適用実証を予定していた。
図3に、ジェット実験機の飛行実験状態の構想図を 示す。実験機寸法に比較して多少大きめのエンジン ナセルとなったが、研究目的に対しては実機と同等 の技術課題を扱えるものである。
図3 ジェット実験機飛行実験構想図
2-4 技術研究
実験機の開発計画と並行して進めた要素技術の研 究は、空力、構造、推進の各技術分野における重点 技術を取り上げた。これらは実験機に適用する技術 ばかりではなく、将来の超音速輸送機開発へ向けて、
重要性も高いものである。主な成果を紹介する。
(1)揚抗比の改善
空力分野においては、実験機に適用した逆問題空 力設計法の開発のほか、超音速境界層遷移点予測技 術の研究、高Re数型自然層流翼設計技術の研究を実 施している。図4に、ロケット実験機飛行実験の成果 を大型の超音速輸送機に適用した場合の揚抗比の改 善効果を示す。コンコルド世代の技術に対し、約1 3%の改善が見込まれる。
(2)ソニックブームの低減
ソニックブームの低減技術はSST実現のキーとな ると考えて研究を進めており、現在計画している静 粛超音速研究機の核の技術でもある。図5には、非軸 対称胴体設計による低ブーム機体の低抗力化を目指 し、CFD最適設計技術を近傍場逆問題設計に拡張し、
代表的な低ブーム近傍場目標圧力波形で設計ツール の確認を行った例を示す。設計結果は目標圧力波形 とよく一致している。
空力技術空力技術 超音速高揚抗比技術 超音速高揚抗比技術 機体エンジン統合技術 機体エンジン統合技術 離着陸高揚力技術 離着陸高揚力技術 CFD全機空力設計技術 CFD全機空力設計技術 境界層技術 境界層技術 低ソニックブーム技術 低ソニックブーム技術 空力試験技術 空力試験技術
��技術
��技術
可変サイクルエンジン技術 可変サイクルエンジン技術 インテーク・ノズル・ナセル技術 インテーク・ノズル・ナセル技術 高環境適合技術
高環境適合技術((低低NoxNox、、低騒音低騒音)) 高温高負荷化技術 高温高負荷化技術 耐熱複合材適用技術 耐熱複合材適用技術 エンジン試験評価技術 エンジン試験評価技術
材料・構造技術 材料・構造技術 複合材構造技術 複合材構造技術 空力弾性テイラリング技術 空力弾性テイラリング技術 ACT技術 ACT技術 材料試験技術 材料試験技術
��技術
��技術 統合画像処理表示技術 統合画像処理表示技術 革新コックピット技術 革新コックピット技術 アクチュエータ技術 アクチュエータ技術
��テム統合技術
��テム統合技術
エ�アルール設計
�ー�設計 ク�ンクトア�ー�
��層��設計
図5 近傍場低ブーム設計の一例
2-5 設備整備
本研究開発プロジェクトに必要な試験設備として、
超音速エンジン試験施設の整備(2001年)ならびに 設計室を含んだ「次世代超音速機研究センター」
(1999年)の建設を行った。超音速エンジン試験施 設は、ジェット実験機の推進システムの設計に資す るための、マッハ数2における推力1トン級のインテ ークを含む高空条件でのエンジンのシステム性能の 評価を可能とする設備で、概観を図6に示す。また、
JAXA調布航空宇宙センター飛行場分室内に建設した 次世代超音速機研究センターは、プロジェクトチー ムが一堂に会する研究棟で、実験機の設計開発と要 素研究、実験結果の検証やデータベース化等次世代 超音速機研究開発の推進センターとしての研究棟で ある。
図6 超音速エンジン試験設備全体図
3�成果
3-1 ロケット実験機第
2回飛行実験と成果 飛行実験は、無推力実験機を超音速で高空飛行さ せるため、固体ロケットモータを使用し実験条件へ 投入した。飛行実験場は南オーストラリアのウーメ ラ実験場を使用し、試験場の地理条件(空域、地上 回収に適したエリア)に適合するように飛行パター ン等を決定した。実験は、ロケットで高度約
23kmま で打ち上げた実験機を高度
18kmと
12kmでマッハ
2の 水平滑空をさせて実験データを取得し、パラシュー トおよびエアバッグで地上回収するものである。第
2回飛行実験は、
2005年(平成
17年)
10月
10日に行っ た(図
7)。この飛行実験で、予定通りのシーケンス で飛行を完了し、計画されたすべてのデータを取得 し、機体もほぼ無傷の状態で回収できた。
2002年の 失敗から関係者一同の努力により改修された実験シ ステムが、その技術成果を十分に発揮して殆ど完全 な計画飛行を完了した。後日のデータ解析でもその 完成度の高い成功が確認された。
図7 飛行実験の様子(リフトオフ直後)
本飛行実験の目的は以下の
3項目である。
(1)CFD
逆問題設計法による自然層流翼設計とその
実証
前述のように然層流翼を目標とした圧力分布を与 え,
CFD逆問題設計手法を用いて形状を求めた。図 8、図
9にマッハ2における圧力分布と翼上面の境界 層状態の比較を示す。これらにより、設計点(
M=0.2、 α
=1.6°)において、計画した圧力分布が実現できて いること、そして、層流境界層の状態が最大
40%翼玄 長まで実現されていることが確認でき
CFDを使、主 翼の設計において、超音速自った自然層流翼設計が 妥当であることが立証された。
(2)
クランクドアロー翼、エリアルール胴体、ワープ翼の設計技術の 獲得
機体の設計コンセプトとして、主翼の平面形をキン ク付のアロー翼(クランクドアロー翼)としたこと、胴体形 状の設計において面積則(エリアルール)を用いたこと、
���������������
������������
��������
��������
�������
約13%改善
���
���
���
���
���
���� ���� ���� ���� ���� ���� ���� 年
���改善��
�����設���
���設���������
�1�������
�������
図4 揚抗比改善効果
-0.03 -0.02 -0.01 0.00 0.01 0.02
Cp
2.2 2.0 1.8 1.6 1.4
1.2 X
Initial Target Final Initial
Target Final Side View
Wing Upper
Wing Lower Top View
また、主翼の設計にワープを施したこと、などの低 抵抗概念を採用した。図
10に抵抗と揚力の関係を示 す。
CFD解析結果と飛行実験結果はよく一致してお り、採用した空力低減コンセプトの効果が確認され た。
(3)
無人機による飛行実験技術の蓄積
飛行実験においては、ロケットモータ結合形態によ る上昇加速、高度および速度要求範囲内での機体と ロケットの安全な分離、無推力機の超音速での飛行 とデータ取得、指定改修地点までの誘導飛行、減速、
パラシュートおよびエアバッグを用いた機体の回収 のすべてを計画通り遂行し、飛行実験を終了させた ことにより、飛行実験技術を獲得した。
3-2 小型超音速実験機(ロケット実験機)飛行 実験データ解析完了報告会
飛行実験のデータ解析作業に約
2年費やした。その 間、
NASA、
DLR、スタンフォード大学などの海外の 研究、教育機関などの研究者を集め、国内の研究者 も参加して
SST-CFDワークショップを開催、飛行実 験結果や
SST研究の将来について活発に議論した。今 回の報告会はそれらの有益な議論が反映されており、
また、議論の過程において、有益な国際的な研究ネ ットワークも構築された。本報告会をもって、本研 究開発の完了の締めくくりとする。
3-3 外部の評価
(1)
科学技術・学術審議会研究計画・評価分科会
2006年(平成
18年)、標記委員会において「小型 超音速実験(無推力)に係わる研究開発」を対象と した評価が行われた。その結果、総合評価として、
『小型超音速実験(無推力)に係わる研究開発は概 ね適切に行われた』と評価された。また、波及効果 を含むアウトカムについては、『次世代超音速機の 開発における
CFD空力設計手法の有効性の認識に貢 献したといえる』、あるいは『一般への公表の視点 では、必ずしも具体的な成果が分かりやすく伝えら れていないため、一層の努力が必要である』等の評 価を得た。
(2)
独立行政法人評価委員会
2004
年度(平成
16年度)、
2006年度(平成
18年度)
の文部科学省独立行政法人評価において、次世代超 音速機技術の研究開発を含む「次世代航空技術の研 究開発」は、『特に優れた実績をあげた』として『
S』 評価を得た。
謝�
第
1回飛行実験の失敗にもかかわらず、対策改修 を行い、結果として世界初の飛行実験システムを完 成させ、その評価として『概ね適切に行われた』と の評価を得ることができた。ひとえに、三菱重工業
㈱、川崎重工業㈱、富士重工業㈱、㈱
IHIエアロスペ ースを始めとする関係各位の「飛行実験を成功させ よう、我が国の航空技術レベルを世界にアピールし よう」という強い不屈の意志の賜物と考える。この 場で深く敬意を表し、同時に厚く感謝を申し上げた い。
-0.1 0.0 0.1 0.2 0.3
0 10 20 30 40 50 60 70 80 90x/c(%)100
Flight (upper) Flight (lower) CFD (upper) CFD (lower) -0.1
0.0 0.1 0.2 0.3
0 10 20 30 40 50 60 70 80 90x/c(%)100
Flight (upper) Flight (lower) CFD (upper) CFD (lower) -0.1
0.0 0.1 0.2 0.3
0 10 20 30 40 50 60 70 80 90x/c(%)100
Flight (upper) Flight (lower) CFD (upper) CFD (Lower)
y/s=0.30 y/s=0.50
y/s=0.70
設計点 :CL=0.1, M=2.02, α=1.59°
Cp
Cp
Cp
I = ±244Pa[計���]
�面CpはCFD��[��Cp��]������
-0.1 0.0 0.1 0.2 0.3
0 10 20 30 40 50 60 70 80 90x/c(%)100
Flight (upper) Flight (lower) CFD (upper) CFD (lower) -0.1
0.0 0.1 0.2 0.3
0 10 20 30 40 50 60 70 80 90x/c(%)100
Flight (upper) Flight (lower) CFD (upper) CFD (lower) -0.1
0.0 0.1 0.2 0.3
0 10 20 30 40 50 60 70 80 90x/c(%)100
Flight (upper) Flight (lower) CFD (upper) CFD (Lower)
y/s=0.30 y/s=0.50
y/s=0.70
設計点 :CL=0.1, M=2.02, α=1.59°
Cp
Cp
Cp
I = ±244Pa[計���]
�面CpはCFD��[��Cp��]������
�層流+遷移�(D�-AC�
�乱流�(D�-AC�
��法���1��
1�.0���������1�.�×106
�層流+遷移�(D�-AC�
�乱流�(D�-AC�
��法���1��
1�.0���������1�.�×106
�層流+遷移�(D�-AC�
�乱流�(D�-AC�
��法���1��
H�1�.�0��������12.2×106
�層流+遷移�(D�-AC�
�乱流�(D�-AC�
��法���1��
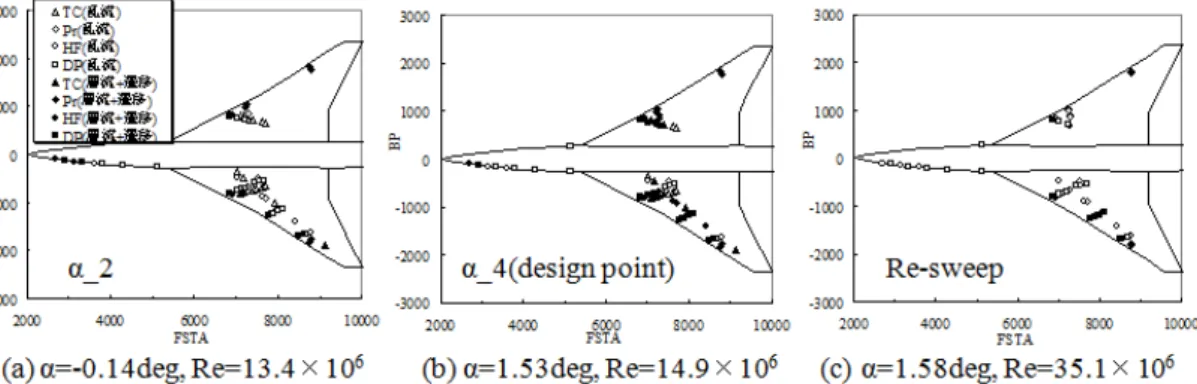
H�1�.�0��������12.2×106 非設計点 CL=0.04 @M=2.01, α=-0.09°,
H=18.8km(Rec=12.2×106)
CL=0.1 @M=2.02, α=1.59°, 設計点 H=18.1km(Rec=13.7×106)
[eN法]
・N=12.5
・N=14
�層流�遷移[HF-AC] �乱流[HF-AC]
�層流�遷移[DP-AC] �乱流[DP-AC]
図8 各断面での主翼圧力分布の比較
図9 自然層流効果の迎角比較
-0.05 0.00 0.05 0.10 0.15 0.20
0.010 0.015 0.020 0.025
CD CL
飛行実験
CFD:全面乱流(SAモデル)
CFD:全面乱流(SAモデル)+付加物 CFD:全面乱流(SAモデル)+付加物+空弾 CFD:境界層遷移(SAモデル)+付加物+空弾 CFD:境界層遷移(SSTモデル)+付加物+空弾
図
10抵抗極曲線(マッハ数
2)
内容
1. 我が国が行う研究開発の意義
2. 研究開発の技術目標とプロジェクト形態 3. ロケット実験機及び実験システムの開発 4. 飛行実験の実施とシステム改修、再実験 5. 成果の概要
6. 最近の状況など まとめ
����������������
����������������
�������������������������������
����年7月��日
��������
����
�� 武
����������
研究開発の意義-1
1. 我が国の航空機産業・活動の拡大には
① 優位技術を活用した自主開発・販売(日本ブランドの確 立とライフサイクルの完結)
② 産業の主流である国際共同開発における参加度合の拡 大、主体的担い手への脱皮
が求められ、そのために競争力のある先端技術が不 可欠。
2. (新輸送システム)超音速機はビジネスや政治にお ける国際交流が不可欠な我が国にとって海外との 距離を縮める最良の手段であり、人類のモビリティ の向上に大きな効果があり、その実現の恩恵を最も 大きく受ける国である。また、その開発に主体的役 割を果たす事が、任務として合理的である。
3
内容
1. 我が国が行う研究開発の意義
2. 研究開発の技術目標とプロジェクト形態 3. ロケット実験機及び実験システムの開発 4. 飛行実験の実施とシステム改修、再実験 5. 成果の概要
6. 最近の状況など
まとめ
内容
1. 我が国が行う研究開発の意義
2. 研究開発の技術目標とプロジェクト形態 3. ロケット実験機及び実験システムの開発 4. 飛行実験の実施とシステム改修、再実験 5. 成果の概要
6. 最近の状況など まとめ
5
3. (技術波及と先導)
経済性、省エネ性、低騒音、低NOx等が求められ る次世代の超音速機のための技術は、その波及効 果も極めて高く、他の技術を牽引するとともにヘリ コプタ・亜音速機など他の航空機の高度化に資す る。
4. (国際連携研究)これからの分野であり、将来国際 共同が必須となる超音速機の開発に先んじて、研 究開発段階における国際連携の主導的役割を果 たす意義は大きい。
研究開発の意義-2
��開発の�����
技術��の��
・���
(����
)実験機
(NEXST-1)技術���
CFD������
(����������������������)実���� ����の��機�の�����������������実��
��と���技術実��
・����実験機 (
NEXST-2)技術��� �������の�������
CFD開発
②���・�����技術
(�����������
)③��������技術������技術
実���� ����機�������機����の�����
(���
)��の 実験機���の技術���飛行実�
技術開発手順と実験機の開発・飛行実験 技術開発手順と実験機の開発・飛行実験
・������
������機����
��������験����
7
技術目標とプロジェクト形態 (1997-2002)
空力技術空力技術
超音速高揚抗比技術 超音速高揚抗比技術 機体エンジン統合技術 機体エンジン統合技術 離着陸高揚力技術 離着陸高揚力技術 CFD全機空力設計技術 CFD全機空力設計技術 境界層技術
境界層技術 空力試験技術 空力試験技術
推進技術 推進技術
可変サイクルエンジン技術 可変サイクルエンジン技術 インテーク・ノズル・ナセル技術 インテーク・ノズル・ナセル技術 高環境適合技術
高環境適合技術((低低NoxNox、、低騒音低騒音)) 高温高負荷化技術
高温高負荷化技術 耐熱複合材適用技術 耐熱複合材適用技術 エンジン試験評価技術 エンジン試験評価技術
材料・構造技術 材料・構造技術 複合材構造技術 複合材構造技術 空力弾性テイラリング技術 空力弾性テイラリング技術 ACT技術 ACT技術 材料試験技術 材料試験技術
制御技術 制御技術
統合画像処理表示技術 統合画像処理表示技術 革新コックピット技術 革新コックピット技術 アクチュエータ技術 アクチュエータ技術 システム統合技術 システム統合技術
実験機システム技術
���空力設計技術
�機体�層����
�ン�゙ン��全機設計技術
CFD�適化・���設計�
高�CFD��ト 複合材技術 推進システム技術
ロケット実験機
ジェット実験機
次世代超音速機と重要技術課題
ロケット実験機と空力設計コンセプト
�� 11.5m
�� 4.7m
�� 2 ton
�����
��������
�ロ��
��プ�
�ン����������
9
CFD逆問題設計法による超音速自然層流翼設計
設計���翼�
��
��
Cp,upper ΔCp≡Cp,lower-Cp,upper
Target Cp
����
eN
法による 自然��に
���
Cp分 布�設�
C������法による����
��に���ΔC�分 布
����
CFD-based Inverse Design
��
①
CFD��
②
Cp�分���
�����
����
1 23 4 5
30%Semi-Span
30%Semi-Span
設計��
70%Semi-Span
70%Semi-Span
Upper Lower Upper Lower
内容
1. 我が国が行う研究開発の意義
2. 研究開発の技術目標とプロジェクト形態 3. ロケット実験機及び実験システムの開発 4. 飛行実験の実施とシステム改修、再実験 5. 成果の概要
6. 最近の状況など まとめ
11
ロケット実験機開発・飛行実験全体スケジュール
ロケット実験機開発大日程 機体開発
実験場整備
設計 再点検
平成9年度 平成10年度 平成11年度 平成12年度 平成13年度 平成14年度 平成15年度 平成16年度 平成17年度 平成18年度 1997 1998 1999 2000 2001 2002 2003 2004 2005 2006
設計
機体製作/関連試験 維持設計 機体形状設計
撤収/データ解析
工事
輸送/豪州 豪州
原因調査/対策検討/機体改修
第1回飛行実験 第2回飛行実験
協定締結
豪州との協定調印風景
2001
年
4月
20日キャンベラにて 第
2回飛行実験終了後、記念パネル寄贈される
2007年
10月
14
η=2%
η=9%
η=9%
下面
η=30%
η=50%
η=70%
η=90%
右側 左側
η=80%
η=50%
計測点��
448点(��ス������計��
↓
�圧力������������������
��面����������シ�����テ�����
↓
��計測点��
332点
η=90%η=70%
η=50%
η=30%
�圧力���
(
Scanivalve���
7����
圧力�
計測システム (1/2) -圧力計測
13
打ち上げ形態空力特性試験
分離空力特性試験 実験機単体空力特性試験
機首部遷移特性試験
回収系統
回収系統機能確認試験
合計 合計 : 205 : 205 日 日 (766 (766 ブロー+ ブロー+ 198 198 ラン ラン ) )
半裁主翼遷移特性試験
ADS (エアデータシステム) 較正データ取得試験
地上試験の一例(開発試験、確認試験 ) :風洞試験
FCC
��
����������
�����������
5
�����
IMU
���������
���������
����器
��
�������
(
�������������
ADC )����器
�������������
�����������
Nz
����
����������
ٝਓΏΑΞθ
༹࣎ည൵ଷࢄΏΑΞθ
ࠗ௶ΏΑΞθ
搭載機器概要
15
熱電対
非定常圧力 Hot Film プレストン管
左 右
左��
熱電対 非定常圧力 Hot Film プレストン管
���ス���
�������ム
�熱電対
�非定常圧力����
計測システム (2/2) -境界層遷移計測
18
静強度試験 振動試験 電磁干渉試験 GNC試験
計測システム試験 非常系試験 回収系試験
機能試験 強度試験
電磁干渉試験 分離機能試験 ランチャ結合試験 地上燃焼試験
システム機能試験 振動試験
電磁干渉試験 計測システム試験
地上燃焼試験 実験機
��上�����
結合形態
地上確認試験
17
����ロケット 結合��機�
実験機
ランチャに搭載
実験機・ロケット結合形態
内容
1. 我が国が行う研究開発の意義
2. 研究開発の技術目標とプロジェクト形態 3. ロケット実験機及び実験システムの開発 4. 飛行実験の実施とシステム改修、再実験 5. 成果の概要
6. 最近の状況など まとめ
19
実験機
ロケット
結合分離機構
分離機能確認試験
後方結合分離機構 前方結合分離機構
荷重
後方機構荷重試験
地上確認試験の一例:分離機能試験
22
打ち上げフェーズ
180
°ロール・分離
回収フェーズ
飛行実験の概要
着地
計測フェーズ(
M=2)
21
����実験場����������
����実験場����������
Woomera Prohibited Area
�������127,000 km2
������
���������
������
��������������
Woomera Woomera Prohibited Prohibited AreaArea
飛行実験場
2002
2002
年 年
77月 月
1414日 日
第 1 回飛行実験-その失敗とシステム改修
ロケットノズルの破損による火炎の拡大
23
Easting [km]
Northing [km]
Altitude [km]
-80 -60 -40 -20 0
-20 0 20 40 60 80 0 10 20
Easting [km]
Northing [km]
Altitude [km]
-80 -60 -40 -20 0
-20 0 20 40 60 80 0 10 20
Easting [km]
Northing [km]
Altitude [km]
-80 -60 -40 -20 0
-20 0 20 40 60 80 0 10 20
Easting [km]
Northing [km]
Altitude [km]
-80 -60 -40 -20 0
-20 0 20 40 60 80 0 10 20
�����
��
��
��飛行
��
M2.7 19km
102km
Max. Speed:
Max. Altitude:
Max. Distance:
Max. Speed: M2.7 Max. Altitude: 19km Max. Distance: 102km
飛行実験の概要
実験機
ロケット 実験機計測��、�ッテリ�
(
回路二重化など計測の確実性、シス テム信頼性向上
)���������
ショート改修、支持法改善 電気回路
・グランド接地手法の改善
(電気回路信頼性向上)
電気回路
・グランド接地手法の改善
(電気回路信頼性向上)
�����止システム
・分離ロジックの改善
(
リセット改修、不時分離危険性回避
)ロケットストッ�
・アンビリカルケーブルのロケ ット噴流による焼損防止対策
アンビリカル��ク��ケーブル
・アンビリカルケーブルのロケット噴流 による焼損対策など
地上電���性向上
地上計測����の信頼性向上
���分離機���向 上�分離信頼性向上
回��ラシ�ートの 信頼性向上
実験システムの改修
実験システムの改修 = = 信頼性�確実性の向上 信頼性�確実性の向上
K.Sakata��分離機�
ロケット���
25
分離ボルト作動の跡
-2 0 2 4
80 100 120 140 160 180
Angle of Attack [deg]
Time from Launch [sec]
1.8 1.9 2.0 2.1
2.2 Mach Number 10
12 14 16 18
20 Altitude [km]
M1.95~2.05 M���
�����
1st Stage 19~17km
�������
2nd Stage 14~11km
計測フェーズ
NEXST-1
successful flight (2005.10.10
at Woomera)
Supersonic
Supersonic Technology : Technology : NEXST NEXST
30
飛行実験結果の概要(1/3)
飛行実験の目的・目標
目的1.CFD逆問題設計法による自然層流翼設計とその実証
目標
a.
超音速三次元翼のCFD逆問題設計ツールを開発し、設計ツールの妥当性を検証する。
b.
空気抵抗(摩擦抵抗)を低減する自然層流翼設計法を開発し、効果を確認する。
CFD
によ�設計し�����と�����を確認、��、設計�(
CL=0.1)に�
���
40%翼����の���の��を確認し、目標������。
�設計��
CL=0.04 @M=2.02, α=-0.09°,
H=18.8km
(Rec=12.4×106)
設計��
CL=0.10 @M=2.02, α=1.59°, H=18.1km
(Rec=14.0×106)
����翼��の層流�
29
内容
1. 我が国が行う研究開発の意義
2. 研究開発の技術目標とプロジェクト形態 3. ロケット実験機及び実験システムの開発 4. 飛行実験の実施とシステム改修、再実験 5. 成果の概要
6. 最近の状況など
まとめ
飛行実験結果の概要(3/3)
飛行実験の目的・目標
目的3.無人機による飛行実験技術の蓄積
目標
無人超音速機に対して、
・ピギーバック方式によるロケット打上・分離システム
・所定の試験飛行条件における空力データ取得方法
・パラシュート・エアバック方式による回収システム を開発し、システムの妥当性を実証する。
シミュレーション結果 搭載カメラの映像
分離
0.5秒後のロケットの位置
ロケット後端部分 実験機翼下面
すべてのシーケンスを計画通り遂行し、すべてのデータを取得。機体はほぼ無 傷の状態で回収。無人機飛行実験技術を蓄積。
着地した実験機
31
飛行実験結果の概要(2/3)
飛行実験の目的・目標
目的2.クランクドアロー翼、エリアルール胴体、ワープ翼の設計技術の獲得
目標
空気抵抗(圧力抵抗)を低減するクランクドアロー翼、エリアルール胴体、ワープ翼の 各設計法を実験機に適用し、効果を確認する。
-0.05 0.00 0.05 0.10 0.15 0.20
0.010 0.015 0.020 0.025
CD CL
飛行実験
CFD:全面乱流(SAモデル)
CFD:全面乱流(SAモデル)+付加物 CFD:全面乱流(SAモデル)+付加物+空弾 CFD:境界層遷移(SAモデル)+付加物+空弾 CFD:境界層遷移(SSTモデル)+付加物+空弾
抗力係数
揚力係数
飛行実験データは、
CFD解析結果とよく一致。従って、揚力に依存する抵抗は
同等であり、圧力抵抗は解析と一致。
34
成果の概要
他機への適用
飛行実証した
CFD逆問題空力設計技術は、超音速輸送機以外の航空機へも適用 できる技術であり、今後の航空機開発にも波及効果が得られる。
データの蓄積
低速、遷音速、超音速におけるすべての速度域において、一連の空力特性、構造、
並びに誘導制御に関するデータを取得。風洞試験結果、
CFD解析結果などを取り まとめたデータベース(
NEXST-DB)は、今後航空機設計時の参照データとなるなど、
将来の航空機開発の際に有効となる。
海外からの評価
国際ワークショップの開催、仏国航空宇宙研究所(
ONERA)との共同研究の実施、
豪州との連携による飛行実験の実施等、国際的な協力関係を確固なものとした。飛 行実験成果について海外企業から本プロジェクトの低抵抗技術、飛行実験技術など に関する技術的な問い合わせを受けた。静粛超音速機技術の研究開発に関して、
米国
NASAと共同研究を締結。さらに締結の拡充を検討中。
33
成果の概要
・コンコルド開発時の技術レベルに対し、
揚抗比の約13%改善(無推進系状態で の比較)に相当。本技術は、現状世界 トップレベル。
・本飛行実験の技術により、50人乗りクラ スの小型超音速旅客機の実現に要求さ れる揚抗比改善目標をクリア。
・本技術と機体/推進系干渉を考慮した最 適設計技術(技術研究)を適用することに より、さらに航続距離を伸ばすことが可能。
・大型SST開発の目標となる揚抗比に対し ては、境界層制御等の技術革新を要する。
(取得データの解析結果については、午後のセッションで報告する予定)
(取得データの解析結果については、午後のセッションで報告する予定)
13%
の�����に相当
13%の�����に相当
ᥭᢠẚ
0 2 4 6 8 10
JAXA-SST コンコルド 13%��
�航�ッ�� 2�0
�� 62�
乗客� 100人
�航�ッ�� 2�0
�� �1�
乗客� 300人
今回開発・実証した空力設計技術の効果:
最近の動き-2
1.
米国
A) NASA
:
SSBJ概念研究
(2015就航
)、
2030頃の大型
SST研究着手
B) Aerion
:
10人乗り
SBJ(
Aerion Jet@
80M$) 2007技術段階終了→開発着手、
2008年欧州販売拡大、
全体で
52機の仮受注。
2012年初飛行、
2015年完成。
C) SAI: Lockheed
が
Skunk worksで着手した低ソニッ クブーム概念を基にした
QSST(
Quiet Supersonic Transport:
2000-2006 ):小型超音速機計画。
4000nM
、
M1.6の小型機。
2.
欧州、ロシア
(1) EU- HiSAC Project
仏、蘭、独、英、露、西、伊などが参加。
10人乗り前 後の
2000nM、
M1.8の小型
SST技術の研究開発プロ ジェクト。
(-Ⅰ:
2005-2008、-Ⅱ検討中
)(2)
フランス
ONERA
基礎研究、運輸省資金による官民の研究、
日仏共同研究など実施中。
(3)
ロシア
現在は資金不足などで研究活動は一時より低調か。
最近の動き-1
1.
我が国
A) JAXA① ロケット実験機の成果により日本航空宇宙学会技術賞、
S評価など
② CFD-
ワークショップ開催にて国際情報交換
③ 国際連携
• ONERA
との共同研究
(主翼境界層
)• NASA
との共同研究��
(2008.05:��ック�ーム���ン�
)��に空�設計�、概念研究
④ 静粛超音速機(
S3TD)メーカと共同で設計研究開始
B) JADCなど民間:
M1.6機体概念研究、複合材適用研究など
JAXA
との共同研究
C)
日ー仏共同研究
(SJAC-GIFAS/JAXA-ONERA)第
1期
(2005-2008)第
2期
(2008-2011) D)その他
① 文科省航空科学技術委員会
② 超音速輸送機連絡協議会
(METI、
JAXA、大学、民間
)③ 日本航空宇宙学会「サイレント超音速旅客機研究会」
(2005~
)④ 国際フォーラムの試み
(Paris, Farnborough-Airshow, Tokyo2008)37
まとめ
次世代超音速機技術研究開発の概要を紹介するとともに、小型超音速実験 機(ロケット実験機)の飛行実験の概要を紹介した。
ロケット実験機の飛行実験は、空力設計技術の確立、実証、飛行実験技術 の蓄積を目的としたものであり、飛行実験の成功とともに次世代超音速機設 計技術の確立に関する大変貴重な空力データを取得し、大きな成果を挙げた。
ひとえに、三菱重工業㈱、川崎重工業㈱、富士重工業㈱、㈱IHIエアロスペー スを始めとする関係各位の「飛行実験を成功させよう、我が国の航空技術レ ベルを世界にアピールしよう」という強い不屈の意思の賜物と考える。この場 で深く敬意を表し、同時に感謝の意を表する次第。
今後さらに実験機による実証研究を目指している。「静粛超音速研究機」皆 様のご支援と参加をお願いしたい。
��������
���������
����������
ロケット実験機の飛行実験技術
○�� �(航空プログラムグループ運航・安全技術チーム)
System Design of Supersonic Experimental Airplane System Shigeru Machida
(Operation and Safety Technology Team, Aviation Program Group )
Key Words : Design, Flight Testing, Supersonic Transport, Experimental System, Unmanned airplane
Abstract
One of the goals of the flight test with the Supersonic Experimental Airplane (NEXST-1) is to substantiate supersonic drag reduction technology with a CFD-based optimum aerodynamic design procedure. Another goal is to establish experimental flight test technology with unmanned airplane. The second flight testing of the NEXST-1 has been successfully conducted on 10 October, 2005 at Woomera Test Range, Woomera Prohibited Area, South Australia. In this report, overview of the experimental system and design and the substantiation for system requirements from flight test data are reported.
1�は�めに
小型超音速実験機プロジェクトの重要な目的の一 つは、次世代超音速輸送機のための最適空力設計技 術(CFD逆問題設計法による自然層流翼設計およ びクランクドアロー翼、エリアルール胴体、ワープ 翼の設計技術)の開発とその飛行実験による実証で ある。もう一つの目的が「無人機による飛行実験技 術の蓄積」であり、その目標は「無人超音速機に対 して、ピギーバック方式によるロケット打上・分離 システム、所定の試験飛行条件における空力データ 取得方法、パラシュート・エアバック方式による回 収システムを開発し、システムの妥当性を飛行実証 する。」ことにあった。
平成
14年
7月に実施した第1回飛行実験の失敗を 受け、改修設計・製造および各種地上試験を行った 上、平成17年10月に第2回飛行実験に臨み成功裏に 実験は終了した。
1), 2)本報では、小型超音速実験機シ ステムによる「無人機による飛行実験技術」概要と 飛行実験によるシステムの妥当性実証について報告 する。
2�システム要求
実験機の開発における基本要求は、以下の通り である。
・最適空力設計技術を飛行により実証出来ること。
・高度、マッハ数をほぼ想定実機に相当すること、
及びレイノルズ数を近づけること。
・無人の実験機として実証目的に適切な論理的なシ ステムであること。
・これまでにない高精度のデータ取得が可能である
・技術目標以外は信頼性の高い要素、機器及びサブ システムで構成されていること。
これらの基本要求を満足するために、検討の結果 設定したシステム要求の主な項目は、次の通りであ る。
① 実験機投入能力
・高度要求:
15km以上
・速度要求:マッハ数2.0以上
・飛行制御要求:投入条件および飛行制限を満たす こと。
飛行制限 速度:マッハ数
2.75以下、高度:
21km以下、動圧:
100kPa以下
② 実験機分離能力
・実験機に支障なく分離が安全確実であること。
③ 実験機飛行能力
・投入後必要な性能・空力等データ取得を可能とす る実験飛行ができること。
④ 実験機回収能力
・回収飛行:パラシュート開傘まで飛行制御が可能 であること。
・回収:パラシュートおよびエアバックを使用し実 験機を回収する。
⑤ 通信計測系統
・基礎データ、機体諸元、空力・構造関連のデータ を計測すること。
⑥ 電気回路
・電源瞬断により誤作動する機器は、電源をピン冗 長とすること。
・不要な電流ループを作らないよう1点接地を基本
とすること。
・機器の搭載位置における温度、高度、湿度、正弦 波振動、ランダム振動
,衝撃の各要求を満足するこ と。
3�ロケット実験機システム�要
ロケット実験機は推進系を持たないので、固体ロ ケットにより高度
18km/速度マッハ
2の状態に投入さ れる。この後、超音速滑空飛行を行い、圧力分布、
揚抗比、遷移等を計測する。計測後は帰還飛行を行 い、パラシュート/エアバッグにより回収するロケ ット打上げ型の無人/無推力超音速滑空の実験機で ある。(図1)ロケット実験機は地上の風洞試験で は得られない静穏な気流状態と、大きなレイノルズ 数での空力データを得ることが可能となる。
以下、ロケット実験機と固体ロケットが結合され たシステムを実験機システム、ロケット実験機本体 を実験機と表記する。
図1 ロケット実験機システム
3-1 実験機
実験機(図2)は、全長11.5m、全幅4.7m、全備重
量約
2,000kgの小型機で、胴体・主翼ともに空気力学
的に最適な形状に設計したため、三次元的に複雑な 形状を有している。
搭載された航法/誘導/制御系統は、慣性航法装
置(
IMU)、エァデータシステム(
ADS)、加速度
センサー(
Nzセンサー)および飛行制御計算機(
FCC)からなる。
FCCからの制御信号により電動アクチュ エータを駆動し舵面(エルロン、スタビライザ、ラ ダー)による飛行制御を行う。
計測系統では、胴体および主翼の圧力分布、揚力
/抵抗、遷移、歪み、温度等、500点以上のデータを 計測する。計測されたデータは機上のデータレコー ダに記録し、高周波データを除いてはテレメータに よりダウンリンクされる。
機体に使用する構造材料は、アルミ合金をほとん どの部位で使用し、結合金具など局所的な強度が必 要な部位にのみ鋼鉄を使用している。実験機の内翼 はリブを桁に垂直に配置する多桁構造、外翼は翼厚 が非常に薄いため中実一体構造となっている。胴体 はマルチフレームのモノコック構造、尾翼および舵 面も翼厚が薄いため中実一体構造である。構造設計 に用いた安全率は、実験機と打上げロケットのいず れも打上げから回収に至るすべてのフェーズで
1.5を採用した。
回収方式として、スペース効率の良いパラシュー ト/エアバッグ方式による陸上回収を採用した。回 収系統は、引き出し用のパイロットシュート、減速 降下用のメインシュート、最終着地衝撃を吸収する ために胴体の前後に窒素ガスにより展張するエアバ ッグとからなる。実験機の主要装備品配置を、図3
水平尾翼アクチュエータ
パラシュート
後部エアバック トランスポンダ エルロンアクチュエータ
慣性航法装置 前部エアバック エアデータセンサ
エァデータコンピュータ
計測用圧力走査器B
Nz