海洋調査技術(Journal of the Japan Society for Marine Surveys and Technology) (1) p. 31-42 March 1989
ROV
(無人潜水機)による海底調査について*
服 部 陸 男**
Bottom Surveys by ROV (Remotely Operated Vehicle)牢
Mu tuo Hatto ri * *ABSTRACT
Recently, development of ROV (Remotely Operated V ehicle) and their related activities have been abruptly advanced. T ot al numbers o f tethered self- pro p elled ROVs were beyond 1, 200 in the world and 120 in J ap an. About 96 % of ROV s in J ap an are sm all ROVs, depth rated between 100m to 500m. T hose small ROVs are easily oper. ated from sm all fishing bo ats or small ships of opportunity, therefore chance of observa. t ion of sea bottom is provided more easily before few years ago. But those ROVs h ave
also limitations in their speed and periferal gears such as acoustic navig ation sys tem. Most of them are very difficult to operat e under current condition beyond 1 knot and to determine precise position.
W e have been developed small ROVs an d used for bottom surveys since 1980. This paper describes a examples of bottom surveys using small ROVs their limit ation・ T h is p aper also describes about an example of deep sea su rvey by a large deep submergence
(3, 300m) ROV “ DOLPHI N- 3K" and it's performance.
1. はじめに 1970年代後半 から1980年代にかけて, ROV の開 発と利用は, 急激 に発展 してきており, 主流である 有索自航 式ROV の累積生産台数は, 世界で1,200 台, 我が国でも120台を越えた . 諸外国で、は, 主 と して沖 合石油開発の現場と機雷掃討用という軍事 目 的で使用されている. 諸外国て、は, これらのROV のうち約半数が中型か大 型のROV であるが, 我が 国では, 96%が小型又は低価格のROVで占められ る. これらのROV は, 漁船程度の小船で使用でき るので, 海底の観察や写真撮影が従来よりも容 易に 行えるようになった . た だし, 位置決めのた めの音 響航 法装債は, 小型ROV よりも高価なので, あま り使用されず, 従って位置精度は船に積んだロラン C 等により決定される. また , 流速が l ノ ット を越 えると, 告IJ御 が困難となる機種が多い. 海洋科学技 術 センターでは, 1980年頃 から小型ROV の開発を 行い, 海底調査に使用してきた . 小型ROV による * 1989年1月9日受理 海底調査のøu, 小型ROV の限界等について述べる. 次に大 型で, 3,300m潜航 可能なROV, ドノレフィ ン ー 3 K が訓練潜航 の際に示した 調査能力を紹介 する. 2. 小型ROVによる調査 2 -1. 我が国の小型ROV 我が国で製造されたROV をT able. 1 に示す. 約 120台のうち半数が水深100m程度の小型( 低価格) のROV で, 本体重量も20 kg以下 でごく手軽 に使 用できる. DLT -300とホー 不ッ トのプロトタイプは, 1980 年と1984年に筆者らが開発した ものである ( 名執ほ か1982 ;青木・服部1982 ;青木ほか1984 ). Fig. 1 か ら Fig.5に代表的小型ROV を示す. これらの小型 ROV は, 1982年頃 から製造され始め, 1986年頃 か ら急増 した. 初期の頃 は, デモン ストレーション を 兼ね た サーヒスとして魚礁等の調査を行っていた が, 最近 では, 調査機器としての地位を確立 しつつ ** 海洋科学技術 センター 深海開発技術部 〒237 横須賀市夏島町2 の15
32 海洋調査技術 第l巻 第l号 1989年 3月
T able. 1. ROVs manufatured in ]apan
;立子\
台リタ持 (
) 償 種 ,,-1 0 0 1 0 0 6 2 (4) RTV-l00 KOWA-l00 KOWA-150 2 0 0 1 8 H I ・ ROV-15 MARCAS DLT-300 3 0日 3 0 (2) RTV-300 MURS-300 RTV-500 5 0 0 1 2 (3) ホーネット " -5 0 0 2. 5 0 0 MARCAS 2 - 2 5 0 0 3. 3 0 0 ドJレフィンー3 K 計 1 2 4 (9)Fig. 1. DLT - 300andムー1 00ROVs manufactur ed by Q.1. I nc.
Fig. 3 . Kowa- 15 0 ROV with a sonar and a still camer a, manuf actur ed by Kowa Co. , Ltd.
Fig. 4 . HIROV ROV with a manipulator and a st ill camera, manufactur ed by Hit achi Zosen Co., Lt d.
Fig. 2 . Launch of Hornet-5 00 ROV, manufac. Fig. 5 . RTV - 1 00 ROVs manufactured by恥1itsui tured by Sumitomo Heavy I ndustries Co.,
Ltd.
恥1 ar. 1989 J our. J apan Soc. 恥1ar.Su rv. Tec h. 33 ある. 製造者が運用しているROV の使用は, ある 程度把握できるが売却先での使用状況は不明な点が 多い. 小型のROV は使用水深が浅く, 小型の母船 とともに流れや天候の変化に左右されやすいので 1 回の運用時間も1 - 3 時間程度で, 月 に多くて40か ら60時間位使用される(服部, 1988a). 小型ROV の使用 目的は, 主として TV カメラ, スチ ノレカメラによる視 覚情報の提供である. それで は TV カメラにより どの程度の映像を得ることが できるのだろうか. 一般のROV が装備してし、る TV カメラは, 通常%インチCCDのカラーTV カ メラ( KOWA 150は%イン チ) で水平解像力は350 本程度である. 適切な照明とノイズの少ない通信回 線を使用すれば, 十分実用に耐える. た だ し放送局 級の画像が必要な場合は,よほ ど条件が良くないと, %インチCCDでは画質は落ちるので, 相応の高画 質の TV カメラが必要となる. ホーネ ットは, 水 平解像力400本, S/N 比58db の 単管式カラーTV カメラを装備しており, 非常に鮮明な画像を提供で きる. 通常 VTR に録画すると画質は落ちるが, SVHS 等を使用して画質の劣化を少なくする必要 がある. ROV 用のスチルカメラも市販されているが, 自 家製のスチ ノレカメラを使用しているROV も多い. た とえば, ] TV - 1 やホーネ ットには, 筆者が設 計した 水中小型カメラが装備可能である. この小型 カメラは, ワインダかモータドライ ブ付きのオリン パス OM - 1 , OM- 2 か OM - 4 とオートストロ ボを, それぞれ500m耐圧ケースに収納した もので ある. 一眼レフのスチ ルカ メ ラのファインダの後ろ に小型の TV カメラを取り付ければ, 船上で TV モニ タを見ながらカメラの シャ ツタを押すことがで きる. ROV の中には小型のマニピュレータを装備する ことのできるものもあり, DLT-300, HIROV 400, ホーネ ット等オプションで装備している機種もあ る. 魚、礁調査には, ソーナーが有効であり, KOWA 150は, 簡単な ソーナーを装備して効果を挙げてい るとL、う. 海底調査には, 精度の良い位置決めが必要である が, 経済性との兼合いであろう. 通常, 漁船程度で は, 市販のロラン Cの絶対位置精度誤差100-200m で調査すれば, 浅海用小型ROV の位置は, ケー プ ノレが短いので, コアサンプノレやドレ ッジと同じで母 船の位置と変わらない ことになる. むしろ 目標物と の相対位置関係を重視 して, 場合によっては海底に 標識等を設けて調査をする必要がある. 相対位置精 度の良い, 市販の音響航 法装置は小型ROV よりも 高価である. 最近では, 廉価な装置もあるが, 精度 の点でいろいろ問題があり, 使用にあたっては十分 に検討する必要がある. なお小 型 ROV 等 国産のROV の現状について は, 作業船一水中ロボ ット特性一(1988) を 参照さ れたい. 2 -2. 小型ROVによる調査 筆 者 ら は, 1980 年に 小 型 の ROV , ]TV - 1
(JAMSTEC TETHERED VEHI CLE - 1 ) を開 発した . このビーク ノレの市販型が, 我が国最初の商 用機キュー ・ アイ社の DLT-300である. ]TV- 1 は, ナウ ノレ島での温度差発電の取水管調査(110m まで潜航 ), 四国沖での貴石サンゴ調査, セコム科 学財団助成金によるダイパと協力しての魚礁調査, そして文部省科研費による富山県沖の埋没林調査 ( 藤井・ 奈須, 1988) 等に使用された. Fig.6 から Fig.8 に魚、礁調査の状況と, ビーク ノレに取り付けた スチルカメラによる写真を示す. この初めての, ダ イパとROV の協力による調査により, ROV とダ イハにより認められる魚種は, 基本的には相違がな い ことが明らかになり, ROV による魚礁調査の道 を聞いた . 我が国の本格的なROV による学術調査 は, 第25次 南極調査の際, 1984年1 月 に行われた DLT - 300 に よ る 海 底 生 物 調 査 で あ ろ う
(N umanami et aL, 1985;Hamada et aL, 1986).
この調査では DLT -300に ステレオス チルカメラ ( キャノンオートボーイ 2台) を取り付け, 昭和基 地近辺の水深16- 200mの底棲 生物の写真撮影, VTR による TV カメラの映像の記録を行い, 生物 群集, パイオマスの解析を行っている. 南極におけ る初めてのROV の利用として記録されるべきであ ろう. ROV による調査は, 最近かなり行われているが, 調査, 観察報告が論文にされてし、るものは今までの と ころ少ない. また 最も多く行われている調査, 報 告は, 魚網の設置前, 設置後の調査, パイ プライン 調査, 魚場調査, 魚、礁調査等であり, 公表になじみ にくいのか, 公表した がらない性質のものか, 利用 されているわりには現状がわからない. ユーザーに
34 海洋調査技術 第1巻 第l号 1989年 3月 の聞に, 三陸沿岸で, 網 メーカーの 手により 1台 のRTV- 100を使って定 置網を中心にした 調査が 行われ,113日間使用されている. 主た る調査項 目は, 海底の状況の調査と網成状態の調査であった . これ はROV が良く稼動している好適な例である. 小型ROV の有効利用のた めに, 使用上の限界, 注意すべき点について述べる. (1) 船はアンカーして母船のスクリューは止めてお くことが望ましい. (2) ビークルの運動を霞も規制するのはケーフソレに 対する流れの影響である. ケープノレカテナリをあら かじめ計算しておき, 運用可能な条件を設定してお く. オベレーションマニュアルを作成する. 製造者 にこれらを要求し, 経験により, 改定しておくと良 ( 3) 使用上, 最も多いトラフツレはケーブ ルの絡みや 損傷であり, ケーフソレの状態は常に把握する. ( 4) 海底においても, ケーブノレをTV カメラで見 る. 特にビークノレが母船方向, すなわちケーフソレが 弛む方向に移動するときは頻繁に監視する. これは ケーフソレの, 浮力材を付けない部分が海底と接触す るのを防ぐため で‘ある. (5) 常に, 風, 流れの方向, 強さに留意する. また 母船, ROV, ケーフソレの関係を把握しておく.
Fig. 7 . Launch of JTV ー1 with a still came ra ( 6) 母船のスクリューを回してのオベレーションは
and a strobe. 小型の母船の方が小回りがきき, ケーブノレも良く監
Fig. 6 . JTV - 1 ROV working with dive rs.
収 V の 色 機 一 ス プ 理 い 員 ク 内 学 ー と Z ト オ ク い 無 浅 業 ス や 科 め 野 明 一 ボ ツ な ・ は 作 に 内 洋 水 心 視 恥 オ ロ パ わ る 深 ' 特 港 海 着 の の H M ば ト は ら す 水 ・ 法 ・ た ば ら ラ 汁 れ ス ラ 逆 査 ・ ぃ 方 く ま え も あ メ ソ き ' メ ・ に 調 る 良 船 お ・ 例 合 イ カ わ で を カ す れ て げ ば 操 て る ( は ル い ん ' の ル 離 流 つ 上 え ' し す ル の 時 チ打 は も チ け ' ら り 行 容 明 明 ク こ ・ る ス 吋 ボ た ス だ は ね 切 も 内 説 説 一 ・ る す る J ロ い と る 時 を で で 業 く て ビ る す 用 す く ト つ ポ き る り 位 度 作 よ れ の い 止 使 対 お ス の ロ で す ま % 何 め て 入 他 て 停 を に て -) ト め 査 止加 で じ い を し を ラ 度 し い 整 ス た 調 潮 の ま か っ 念 る 適 一 メ 角 握 良 調 ・ の を ・ け 画 る ら に は す で ユ カ き 把 で 量 る 止 離 る だ 計 き あ 等 作 習 の リ ル 傾 を 定 光 す 防距 て る で で に 容 操 練 る ク チ の 係 国 動 用 タ い た き い ら 長 内 の く き ス ス ラ 関 も 自 使 ツ 長 を で な か 船 業 一 よ で は メ 置 り ( で ヤ ン し だ 作 ユ で 視 時 間 カ 位 絞 構 ト キ 附 ラ 附 を の 帥 の リ 湾 m よ 札 月 k こ ゆ 3 免u bv n HU -( 一 バ 年 間 カ 8回 r υ 一 仏 閣 l i e 胃i 1 J 凶d メ し ら P M U 刷 網 凶 か m v 寸机 月 a l は 、a ぱ一 て 仁 年 t V し る 6 阿灯 比喝m i d 例 カ h H の 例 と 川 町 績 用 i J べ m 実 使 じ 一 凶 α た の L U 川 川 山 川淵 e u -uk一回 8 ・w 使 わ ト り R 回 目 よ る 日
恥1ar.1989 j o ur. j apa n Soc.恥1 ar.Sur v. T ech. 35 技術 センターのヒークル) のオベレーションを見学 するのも良いし, オベレーショ ンマニュアノレやカヂイ ド ライン (MTS, 1984) を 参考にするのも良い. 小型のROV は, 概して推進性能が中型, 大 型の ROV に対して劣るので, いつ, どこでも運用でき る訳でなく, 流速l ノ ット程度が限界と思われる. また , カタログ値と実際が異なる例があるので, 速 度と推力は, 実測させるのが望ましい. 2 - 3 の国 産機にもかなり推進性能の良い機種がある. 逆に, 運用の時期を 選べば, 小型機でも100m以上の深度 での調査は可能である. 筆者は, 1988年に文部省の 科研費, 海外学術調査の際, パ ラウ ( ベ ラウ)共和 固までキュー ・ アイ社のb. -100を 手荷物で運搬し, 水深110mまでのオベレーショ ンを行っている. 3. 大型ROVによる調査 3 -1 ドルフィンー3K の概要 ドルフィンー 3 Kは, 水深3, 300mまでの調査可能 の, 我 が 国 では最深, 世界 でも有数 の大 深度用 ROV である. ドノレフィン 3 Kは1982年に設計を 開始し, 1987年 8月に引き渡しを 受けた . 詳細につ いては, 服部 (1988b, 1989) を 参照されたい. ド ルフ ィンー 3 K は, 海洋科学技術 センターの運航 す る「な つ し まJ (1, 553G/T ) , rかし、 ょうJ (2, 849G/T) を 支援母船として運用される. 使用 目的 は, 有人潜水船「しんかL、2000Jのための事前調査 と万一の場合の救難である. これらの使用 目的に対 応するために1987年 8月から1988年6月にかけて運 用訓練を実施した . 1987年8月に「かいよう Jで 6 回, 1988年2月から 6月にかけて「なつしまjで25 回, 計31回の運用訓練を実施した . その内容は11回 が救難訓練, 残りが一般的な運用訓練と深海調査訓 練であった . ドノレフィンー 3 K の仕様の概要を Table. 2 に, 「なつしま」に搭載した ときの一般配置を Fig.9 に 示す. Fig. lOにビ ークノレの構成を示す. 調査用機器とし ては, 水平解像力400本, ズームレンズ付きの%イ ンチ単管式カラーTV カメラ, 水平解像力630本の %インチ単管式白黒TV カ メラ (前方ス テレオ用 特別設計した ドーム型のア クリ ルレンズが使われて おり, カ ラー TV カ メラで水平530, 垂直 420, 白黒 TV カメラで水平790, 垂直 63。の広い画角を提供し ている. TV カメラの画像は U-<チッ ク 2 台と VH S 2台の VTR に記録される. ス テレオス チル カメラは米国の P ho to s ea社製でγングルで250枚, ス テレオで100ベアの写真が撮影できる. 作業, 資 料採取用として 2 本のマニピュレータがある. 右 手 が関節の運動自由度 7 のマニピュレータ, 左手が自 由度 5 のグ ラバである. 両方とも腕の長さ (アウト リーチ) が1. 5m, 取り扱い荷重が20切である. 爪 先の聞きは15cmでこれらの 値は「しんかL、2000Jと 同等としてある. マニピュレータは, 操作者が小
Table. 2 . Main specifi catio ns of the DO LPH IN-3 K system ① ピークル 寸 法:約3 mlLlx約2 mM1x約2 mlHJ 重 量 約3.7トン 使用水深: 3,300 m 速 度:前進3ノット, 後進2ノット, 左/右進1.5ノットl 上/下 進lノット, 回転300/ sec 動 力・電動油圧式, 電動機( 3Ø, 2,250V, 40kw) スラスタ 前後2 x 15馬力, 左/右2x 9.5馬力、 上/下2x9馬力 観測調査用装置 高品質カラ TVカメラ, 白黒ステレオTVカメラ, 後方白黒TVカメラ, ライト, ステレオスチノレカメラ, マニ ヒ・ュレータ( 7自由度) , グラパ( 5自由度) , ディスクカ yタ, シアカッ タ, 流速計 航海装置:前方障害物探知ソ ナー, 音響方位探知ソーナー, 高度、ノー ナー, 深度計, ジャイロコンパス, レ トジャイロ, 傾斜計, レスポンダ ② 船上装置 総 合制 御室・総合操作盤, データ処理制御装置等 着水場収装置. ケ プJレウインチ, トラクションウインチ, ラムテンソ ョナ, ジンパルシープ, �IJ索による着水揚収装置等 ケ ー プル:光 電気複合ケ プJレ(長さ5,∞Om, 直径30皿v 破断 16.5トン以上) ‘�ー=守司ー 一町二二 句 .... ニ�.- Tether Cable ι戸 >〆 、 2台, 後方用 1 台) , カラーTV カメラと同じ上下 Fig. 9 . A rrangement of the DOLPH IN-3K sys-左右 旋回装置に取り付けた ステレオス チルカ メラと tem o n the deck of the suppo rt ship ストロボがある. TV カメラ用耐圧ケースの窓には, “Natsushi ma"
36 海洋調査技術 第 1巻 第1号 1989年 3月
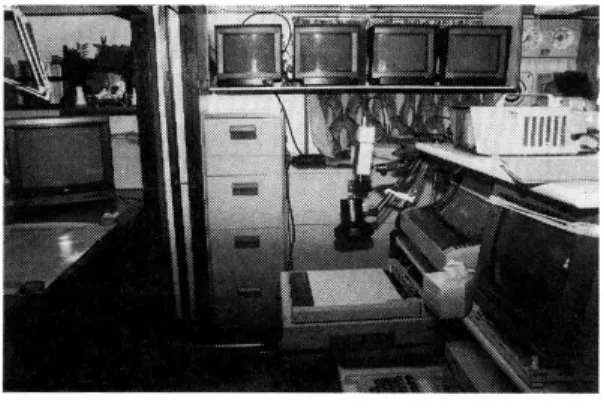
Fig.10. Detail of the DOLPH IN-3K vehicle. 型の腕 (マスタ ーアーム ) を装着し, 操作するとビー クノレのマニピュレータ ( スレーブア ーム ) が同じ動 きをするマスター・ スレーブ方式である. この方式 だと動作も早く正確で, 迅速にサンプリング等が行 える. グラ パは, ジョイ スチック操作によるレート コントロール方式であり, 一度に一つの関節しか操 作できない. また , 救難用に回転式のカッタと押し 切り式のカッタを有し, これらは, 機器の回収用や 岩石等の採集用に使用できるであろう. あるいは, これらの 2 つの油圧用ポートを利用して, オプショ ン機器を作動て‘きる. 現在 CTDを製作中で, 1989 年 3月頃までに, ピークノレに装備し試験する予定で ある. なお, ビークノレの方位は, ジャイ ロコンパス によっているが, 精度は:t 1 0, 深度計の精度は3, 500mフノレスケーノレで 0.1%, 高度計の精度は高度 の 1 % :t0.1 m, 音響航 法装置の精度はス ラ ントレ ンジの1. 4%以内である. 次に, ドノレフ ィンー 3 Kオベ レ ーショ ン中, 観 察者は, 船上のどこにいて, どのような情報が得ら れるかについて述べる.rなつしまjの場合, ドノレフィ ンー 3 K �こ関する情報が得られる場所は, ビーク ノレの操作を行う総合操作室内 (コンテ ナハウス 6 (L ) X2.4 ( W ) X2.4 (H ) m) , ブリ ッジの後部 の総合指令室内, 後部操舵室内そして第l ラ ポ内で ある. 主観察者は, 総合操作室内 (Fig.11 ) でビー クノレ指簿者に要求を伝える. ドノレフィンー3 Kの場合は, rしんかし、2000Jと 異なり観察者は船上にいるので, 複数の, 専門の異 なる観察者による調査が可能である. Fig.11の 2
Fig.11. T he co ntrol co nsole of the DOLPH IN-3K
つのパイ ロット席の後部中央にビークノレ指揮者が着 席しており, 2 - 3 名の観察者はその後方にいるこ とができる. 観察者は, 主として20イ ンチモニタで カ ラー TV の画像を見ながら, 必要 に応じ, LED ポイ ンタで画面上をさして, 採取して欲しい資料等 をビークノレ指揮者 に伝えることができる. Fig. 12 に総合指令室を示す. 総合指令室の前方の ブ リッジに20イ ンチモニタ, その右手上方に 4台の14イ ンチモニタが配置してあ る. 20イ ンチモニタでは, ビー クノレのカ ラー TV 画面を, 14イ ンチモニタでは, それぞれ切り替えで, ビークノレのカラーTV 画面, 白黒TV 画面, 音響 航 法画面, 総合操作室内 TV 画面 2台の甲板TV 画面, 前方障害物探知 ソーナー画面等を見ることが できる. Fig. 12の中央 下 側 に示すX-yプロッタ で:.11, あらかじめパーソナルコンビュータに入力し てある等深線図を任意の縮尺で出力させ, その上に, 支援母船, ビークノレの位置がプロットされる. 総合 指令室では総合操作室内の状況, 音声も14イ ンチモ ニタで知ることができ, 両室聞は有線での通信がで きるので, 全体指揮者や観察者の一部は, 総合指令 室で観察等を行うことができる. また 総合指令室で は 2台のパーソナノレコンビュータの CRTに音響 航 法の簡易 3次元表示, ケー プソレ繰り出し状況の表 示等が示される. これらは, X-yプロッタへの位 置プロットとともに, システム 受領後海洋科学技術 センターで開発した (高橋ほか1989) . 後部操舵室 には, 操船に必要なビークノレに関する情報が, 第l ラ ボには, 20イ ンチモニタ 1台の切り替えで, 総合 指令室のモニタと同様な画像が提供される. このよ うに, 観察者に対しては, 船内の 3 カ 所で十分な情 報が提供される.
Mar. 1989 J òur. J apan So c. Mar. Surv. T ech 37
Fig. 12. T he o p eratio n cent er of the DOL PHIN-3K 3 -2 . ドルフィンー3Kによる調査 ここでは, ドノレフィン 3 K による特定の海域 の調査結果について述べるのではなく, これまでに 行った 深海調査訓練の実例を通して, ドノレフィン 3 Kの調査能力について述べる. 3-2ー, . ドルフィン -3Kの行動範囲 ドルフィン- 3 Kは, 海外のROV に多く見られ るランチャ ー型ではないので, 海底での行動範囲は 広いが,ケ ーフソレに対する流れの影響は大きく,ケー ブノレ抵抗に打ち勝つ推進力の範囲で行動て‘きる. 流 れ, ケーブ ノレ長, 推力等のパ ラ メータを変えた 場合 のケーブ ノレカノレテ ナリ, ビークノレの行動範囲につい ては計算しマニュア ルを作成しである. おおまかな 行動範囲について簡単に述べる. 水深 2,OOOmで流 速 1 ノ ッ ト, ケーフノレ長 4,OOOmの場合, ビークノレ は海底で, 支援母船の位置を原点として, 前方に約 1, OOOm, 後方に約 3,500m, 左右に約l,OOOmの移 動が可能である. 水深 3,300mで流速 0. 5ノ ット, ケーフソレ長 4,150mの場合, ビークノレは海底で, 前 方に約700m, 後方に約2, 500m, 左右に約l,500m の移動が可能である. 支援母船が位置を保持してい る場合は, これを目安として, この 値の70- 80%内 側で行動すれば自由に動ける. もちろん支援母船が 移動すれば, 行動範囲は拡大する. 実際上は, 支援母船も操船して, ケーフソレをス ラ ントレンジに対して最大で1.2倍, 通常は1.1倍以内 に保ち, かつヒータ ノレから150m離れてケーブ ルに 取り付けた 小型 ト ランスポンダの海底からの高度 を, 海底から約50m程度に保てば, ケーフノレが海底 と接触することなく,安全にオベレーションできる. なお, ケーフソレが海底と接触し, 傷つくのを防ぐた め, 支援母船はヒータ ノレよりも常に水深の深いほう に位置するように操船している. Fig. 13にドノレフィンー 3 Kと「なつし ま」の航 跡の例を示す. 海域は相模湾初島南方で, 当初の予 定通りのノレート で調査, サンプリングを実施した . 3- 2 - 2 . 観察と資料採取 有索自航式ビークノレの利点の 1 つは, 船上で多数 の観察者が同時に観察でき, オベレータに要望を伝 えられることである. 従って, TV カ メラの画像は 鮮明さが要求される. ドノレフィンー 3 K のカ ラー TV カ メラはズーム レンス付きで, 500w 5灯の前 方照明と信号 の減衰, ノイスの少ないデン タ ノレ光 ファイバ通信により鮮明な画像を提供している. ま た , 白黒TV カ メラは, 低照度で, 約10m位前方 までの広い画角の闘像を提供している. Pho to sea 社のステレオスチノレカ メラも良好に作動している. なお, このステレオスチノレカ メラ用に, 簡易 型のス テレオ解析装置が使用できる. TV カ メラのモニ タ 画面には, 現在時刻, ビークノレの水深, 高度が表示 されているが,平成元年度中には CT Dデ ータ,ビー クノレ及びTV カ メラ方位, 支援母船方位等も追加 する予定である. Fig. 14, 15, 16にステレオスチ ルカ メラによる ステレオ写真を示す. Fig.14は, 駿河湾戸田沖水 深l, 400mで撮影した 完新世と推定される粘土, シ ノレ ト, 粗粒砂層を切る断層で, 走向はN270E, 南 落ち落差 3 m以上と推定される. Fig.15は, 相模湾, 沖の山堆のシロウリカイコロニーにおける生貝の産 状で, この場所における近接写真のステレオ解析に よると 1 平方 メートノレ当たり430個体が数えられ た. Fig.16は, f中の山堆麓の角れき凝灰岩と 2 種 類のチューブワームの産状を示す. スチノレカ メラのスト ロボの電源はビー クノレから供 給されており, ストロボの充電には約 6秒を要する. また , カ メラの撮影枚数は250枚 (ステレオで100ベ ア)なのでビデオからハードコピーをとる必要が生 じる. 今のところ, ビデオ画面を写真撮影するのが 1番簡単である. Fig. 17, a, b �こ例を示す. 資料採取は, 主として 7 自由度のマニピュレータ により行っている. ドノレフィンー3 K の場合マニ ピュレータ作業は, ["しんかし、2000Jに比べ格段に 早く, 正確である. ["しんかし、 2000Jの場合, 採取 した い資料を決めてから, パ ラスト調整し, 着底し
38 海洋調査技術 第l巻 第1号 1989年 3月
/
ð RtlV Rl <!> XPNO T1 白 炉問T2 0 伊問T3 ※ E倒IJRG う官俗?tFrh抑制:Fig. 13. A n example of the tracking c hart of the vehic le and the support ship.
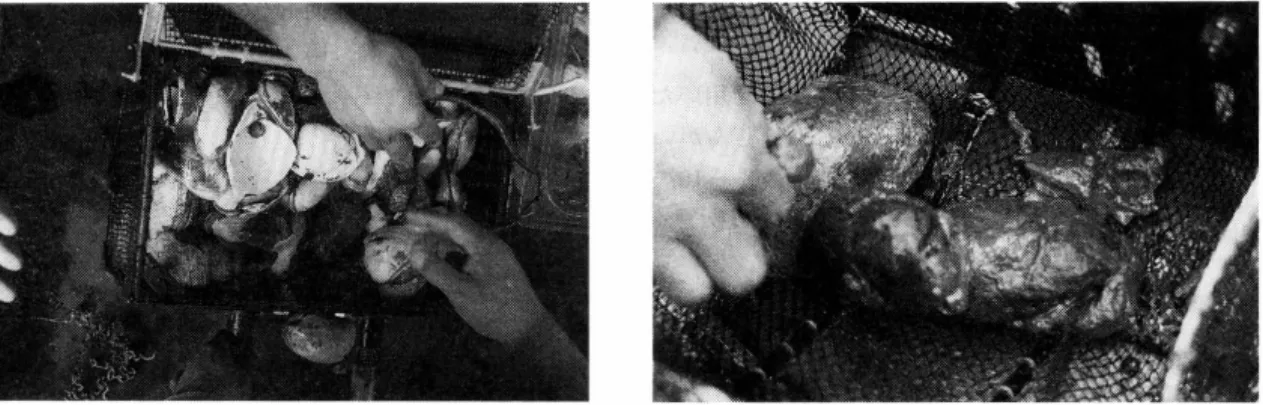
てマニピュレータを引き出すまで約10-15分を要す る. ドルフィン -3 Kの場合は, 2 - 3 分で着底し マニピュレータを引き出すことができる. 資料採取 作業も迅速で, シロウリカイを約100個体, その他 の貝類 2 - 3 個体を採取するのに 1 時間も要しな かった . Fig. 18に資料採取の状況を示す. Fig. 19, a, b に採取した 貝類, れきを示す. 「しんかし、2000Jですでに指摘さ れているように (山崎, 加 藤, 1988 ) , 潜水船は傾斜地での資料採 取は苦手である. ドノレフィン ー3 K についても同 様な問題があった が, ビー クノレのフレーム下側に, 高さ 20cmの木製のそりを取り付けることにより, か なりの傾斜地 (45。位) での着底作業が可能となった. また , シロウリカ、イ棲息地から, 上方の露岩地帯に 続くカレ場 (傾斜300{立)では, マニピュレータと 推進器を併用してよじ登ることもでき, 微妙な着底 位置の修正もできた . 今後は, 45。以上の傾斜地で の資料採取に対応できるように, 訓練, あるいはフ レームの改造が必要となろう. 持ち込みの計測器類に対する対応としては, コネ クタの予備, カッタ用の 2 つの油圧ポートが使用で きるが, 事前の調整が必要である. 計測器等のベイ ロードは, 中性浮力ならば, 取り付け方を工夫すれ ば空中重量約150 kgに対応できる. ビークノレの上下 ス ラス タの上方推力は, 87 kgであるので, 水中重 量80 kg位の計測器の設置は工夫次第で可能であろ う. ちなみに, マニピュレータ, グラパの吊り下げ 可能重量は, 各 40 kg, 腕 を前方にまっすぐ延ばし た ときの持ち上げ可能な重量は, 各 20 kg ( 実測し た 実力は各 40 kg) である. 3 -2 -3. 運用時間, 目標探査方法 ドノレ フィ ン 3 K の 訓 練時の 運 用 タ イ ム ス ケ ジューノレは, 大体 Table. 3 のとおりである. 水深 2, 000mで約 5 時間, 3, OOOmで約 4 時間の調査が可 能である. もちろん状況によりもっと長時間の調査 はできる. ドノレフィン 3 Kの潜航 は, ビー クノレの 上 下 ス ラス タ によって 行 う の で, 速度 は最大 30 m/min. 浮上は, ウインチでケーブ ルを巻 き上げ るので最大45m/min. である. これまでの経験による音響航 法装置の位置精度
Mar. 1989 Jour. Japan Soc. Mar. Surv. T ech 39
Fig . 14. A pic ture taken by stereo still camera shows the H olocene se mic onsolidate d deposits c ut by nor mal fault, Suruga Bay, off H eta, depth about 1, 400 m.
Fig . 15. A stereo sc opic pic ture of a c olony of living Calyptogena, Oki noya ma Bank, de pth 1, 120m. は, 仕様の, ス ラン トレン ジの1. 4%より若干悪い 結果が出ているよう である. た とえば, 資料採取の ため, 約 1 時間着底していた時のビークノレ位置のば らつきは, 水深約1, 200mス ラントレン ジ1, 400mで 40mから70mの円内におさまっていた. 同じ 目標物あるいは目標点に何度も潜航 する必要 がある場合, 上述の位置精度では再接近に時間がか かる. あらかじめ ト ランスポンダが海底に設置して あれば, これを目標に接近することは確実にできる. ト ランスポンダを設置してない時は, 上述の音響航 法装置の誤差をカバーする意味で, 海底に目標物と して ガイド ラインを設置しておく方法が有効である ことが確かめられた (内田ほか, 1988) . 1988) . 4. おわりに 小型ROV そして大 型ROV はともに, 一部では かなり使用されているが, これから本格的なROV 実用化の時代が来 るものと思われる. ROV 自体の 、ードの信頼性は概して高い. ROV で最も困難な のは安全かっ効果的な運用であり, 小型, 大型の ROV 両方の開発, 運用経験を有する海洋科学技術 セン タ ーを有効に活用されんことを願う ものであ る.
40 海洋調査技術 第 1巻 第l号 1989年 3月
Fig. 16. A s tereo sco pic pic ture of living ves timentif eran tube wor ms and tuff breccias , Oki no yama Bank,
depth 1, 116m.
Fig. 17. E xamples of co lor TV recor ds pic ture d by a still camera.
a. Suruga Bay, off Heta, depth 1, 434 m .
b. Suruga Bay, off Heta, depth 1, 299 m .
Mar.1989 ]our. ]apan Soc. Mar. Sur v. Tech 41
Fig. 19. Samples colle cte d by the manipulator.
a. Samples from the Okinoya ma Bank, depth, 1,120m, living Caly.ρtogena, vestÎmentiferan tube worms, Conchocela and N,ψtunea were collecte d.
Table. 3 . Operational time sche dule of the DO LPHIN - 3 K 実施事項 スケジューJレ スケジュール 2. 000m 3. 300m 時 分 時 分 前日ケープルにガイド 索取り付け ピーヲル篭源投入 7 : 00 7:00 ピークルチェyク 8 : 00 8 : 00 デッキ作業用意 8 ・ 30 8:30 ピークル吊上 9 : 00 9 : 00 潜航 9 1 0 9 ・ 10 着底 1 0 : 20 11 ・ 00 調査, 作業等 (5 h r) (4 h r) 浮上開始 1 5 : 20 1 5 : 00 浮上 1 6 : 1 0 1 6 : 20 甲板上 1 6 : 25 1 6 : 35 引 用 文 献 青木太郎 ・服部陸男:自航式ビーグノレの開発と実用 試験, ]AMSTECTR, 9 , p. 39-49, (1982 ) 青木太郎ほか:自航式ビークノレfHORNET - 500J の開発,]AMSTECTR,12, p. 39-49, (1984 ) 藤井昭二 ・ 奈須紀幸:海底林, 東京大学出版会, (1988 )
Hama da , E., et al Observation of the Marine Benthic Crganisms Using a Remotely Oper ate d Vehicle, Mem. Natl. I nst. P olar Res., Spec. Issue, No. 40, p. 289 -298,
b. Gra vels collecte d at the Suruga Bay, off H eta, depth 1, 400m.
Res., Spec. Issue, No. 40, p. 289-298, (1986 )
服部陸男:我が国におけるROV の運用状況につ いて, S ci. & Tech., 1, 1 p. 24 - 30,
(1988a ) 服部陸男:無人探査機「ドノレフィンー 3 KJについ て, 日本造 船学会誌, 704, p.104-111, (1988b ) 服部陸男ほか:無人探索機「ドノレフィンー 3 KJ の 開発と運用訓練,]AMSTECTR, 21,印刷中, (1989 )
MTS Operationa l Guideline for ROVs, Marine
Technolog ica l S ociety, (1984 )
名執蒸 ・青木太郎・服部隆男:ケー プソレコントロー ノレ式テレビゾステムの試作, ] AMSTECTR,
9 , p. 39-49, (1982)
Numanami, H., et al: A Biomass Estimation of Epifauna l Megabenthos by Stereophotogra phy around Syowa Station, A ntarctÎca, Me m. Natl. I nst. Polar Res., Spec. Issue, No.44, p.145-150, (1986)
田淵寛:小型自航式無人探索機( L CROV ) につい て, 全国 沿岸漁業振興開発協会, 中央講習会
資料, p. 104-115, (1988)
Tabuchi, H. Mitsui RTV Series, an E xa mple of
L ow Cost ROV in ]apan, Proc., TECH NO-O CEAN '88, 11, p. 239-246, (1988 )
42 海洋調査技術 第1巻 第1号 1989年3月 高橋賢ーほか:ドルフィンー 3 K用追跡監視 シス テムの開発, ]AMSTECTR, No. 21, 印刷 中, (1989 ) 内田徹夫ほか:潜水機による ガイドラインを用いた 目標への再接近について, 第 5 回「しんかし、 2000J シンポ ジウム, 予稿集, p. 8 -10, (1988) 山崎晴雄, 加藤茂:駿河トラフ北部の海底地形・地 質と地殻変動, 第 4 回「しんかL、2000J研究 シンポ ジウム報告書, 海科技セン ター, p. 67-81, ( 1988)