筋の変動に対応可能な筋電信号計測法の開発
著者
小西 有人
学位名
博士(工学)
学位授与機関
大阪電気通信大学
学位授与年度
2013
学位授与番号
34412甲第38号
URL
http://id.nii.ac.jp/1148/00000122/
Creative Commons : 表示 - 非営利 - 改変禁止 http://creativecommons.org/licenses/by-nc-nd/3.0/deed.ja様式博3
博 士学位 論文
題 目 筋の変動に対応可能な筋電信号計測法の開発 担当指導教員名 吉田 正樹 ㊞ 申 請 年 月 日 2014年 02月 03日 申 請 者 専 攻 名 医療福祉工学専攻 学 D08601 生 番 号 氏 小西 有人 ㊞ 名大 阪 電 気 通 信 大 学 大 学 院
博 士 学 位 論 文
題 目 筋の変動に対応可能な筋電信号計測法の開発 学 生 番 号 D08601 氏 小西 有人 名大 阪 電 気 通 信 大 学 大 学 院
目次 第1 章 緒論 ... 1 第2 章 筋収縮と筋電図に関する知見 ... 7 2.1 諸言 ... 7 2.2 筋の構造 ... 7 2.3 骨格筋の収縮 ... 9 2.4 平行筋と羽状筋 ... 12 2.5 筋電図と計測方法 ... 14 2.6 表面筋電図の誘導方法 ... 16 2.7 積分筋電図 ... 18 2.8 結言 ... 20 第3 章 筋線維走行方向推定法の開発 ... 21 3.1 諸言 ... 21 3.2 仮想単極誘導法 ... 21 3.3 筋線維走行方向推定法 ... 23 3.4 結言 ... 26 第4 章 模擬筋電図を用いた筋線維走行方向推定法の妥当性の検証 ... 28 4.1 諸言 ... 28 4.2 模擬筋電図の生成 ... 28 4.3 模擬筋電図を用いた筋線維走行方向推定 ... 31 4.4 模擬筋電図を用いた筋線維走行方向推定結果 ... 32 4.5 考察 ... 37
4.6 結言 ... 39 第5 章 外側広筋の筋線維走行方向推定実験 ... 41 5.1 諸言 ... 41 5.2 実験方法 ... 41 5.3 仮想単極誘導法のハムノイズに対する有用性検討結果 ... 44 5.4 膝関節運動時の筋線維走行方向推定結果 ... 47 5.5 考察 ... 53 5.6 結言 ... 59 第6 章 筋線維走行方向に沿った位置間の差動信号算出 ... 60 6.1 諸言 ... 60 6.2 模擬筋電図を用いた電極間信号の推定方法 ... 61 6.3 電極間信号の推定結果と電極間筋電信号の算出結果 ... 63 6.4 考察 ... 68 6.5 結言 ... 69 第7 章 結論 ... 70 謝辞 参考文献
図目次 図 1 筋の構造の概略図(断面図) ... 8 図 2 運動単位 ... 10 図 3 平行筋と羽状筋 ... 12 図 4 収縮による羽状角の変化 ... 13 図 5 電極の種類 ... 15 図 6 筋電図の誘導方法 ... 17 図 7 積分筋電図処理の流れ ... 19 図 8 従来の双極誘導法 ... 23 図 9 仮想単極誘導法 ... 23 図 10 筋線維走行方向推定法の概略図 ... 24 図 11 筋電図モデル ... 29 図 12 模擬筋電図基本波形 ... 30 図 13 生成した模擬筋電信号 ... 33 図 14 模擬筋電信号の差分結果... 34 図 15 差動信号の相互相関関数... 35 図 16 伝導角度推定結果の平均値と標準偏差 ... 36 図 17 推定結果の誤差と電極の関係 ... 38 図 18 電極貼付位置 ... 43 図 19 仮想単極誘導法により計測された信号 ... 45 図 20 仮想単極誘導法により計測された信号の差動信号 ... 45 図 21 仮想単極誘導法により計測された信号の周波数解析結果 ... 46 図 22 仮想単極誘導法により計測された信号の差動信号の周波数解析結 果 ... 47 図 23 仮想単極誘導法により計測した表面筋電図 ... 48 図 24 仮想単極誘導法により計測された信号の差動信号 ... 49 図 25 差動信号より求めた相互相関関数 ... 50 図 26 筋線維走行方向推定結果の平均値と標準偏差 ... 52 図 27 推定結果を平面に描写した様子 ... 52
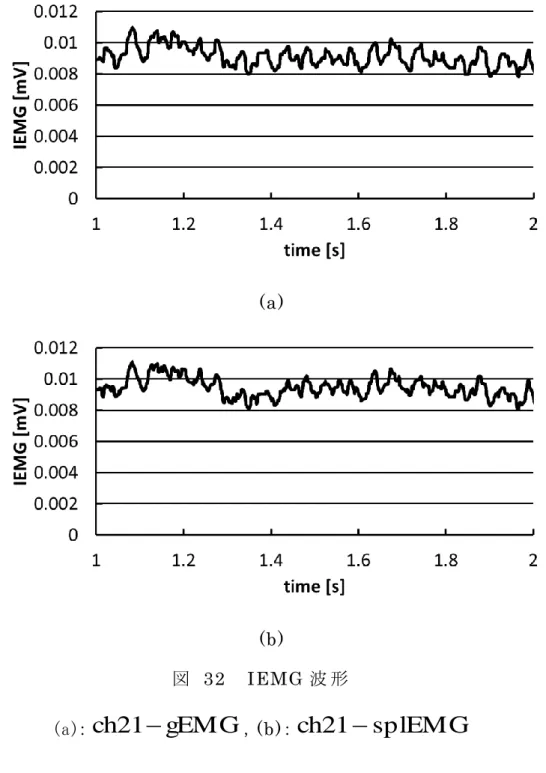
図 28 外側広筋[文献 36 より引用して改変] ... 55 図 29 961ch 模擬筋電図のチャンネル番号 ... 62 図 30 ch263 EMG 波形 ... 64 図 31 ch21 と gEMG,splEMG との差動信号 ... 65 図 32 IEMG 波形 ... 66 図 33 計測した ch③の EMG と推定した ch263 の EMG ... 67 図 34 推定した筋線維走行方向に沿った表面筋電図 ... 68
1
第
1 章 緒 論
人 は筋 を収 縮 させることで関 節 運 動 をはじめとする様 々な動 作 を行 って いる.筋 は脳 からの 指 令 を受 けて収 縮 している.脳 からの 指 令 がα運 動 ニ ューロ ンを 介 し て筋 に伝 達 されると 活 動 電 位 が 発 生 し , 筋 が 収 縮 す る . こ の 活 動 電 位 , つ ま り 筋 電 位 を 導 出 ・ 記 録 し た も の が 筋 電 図 (Electromyogram : EMG)である.筋 電 位 の導 出 法 は用 いる電 極 によっ て大 きく 2 つに分 類 されている.1 つは,筋 内 に刺 入 する針 電 極 を用 いる もので,針 筋 電 図 と呼 ぶ.針 筋 電 図 計 測 法 では,人 体 に対 し て侵 襲 性 が あるものの,筋 内 の電 位 変 化 を高 い空 間 分 解 能 で識 別 できることから,神 経 筋 疾 患 の診 断 などの臨 床 分 野 で用 いられている[1].もう 1 つは皮 膚 表 面 に 貼 付 す る 表 面 電 極 を 用 い る も の で , 表 面 筋 電 図(Surface EMG : sEMG)と 呼 ぶ . 表 面 筋 電 図 計 測 法 は 無 侵 襲 で あ り , さら に 皮 膚 表 面 に 電 極 を貼 付 するだけで容 易 に計 測 できることから,様 々な分 野 において用 いら れて い る. ス ポー ツ 科 学 やリハ ビ リテー ショ ンの 分 野 にお い て は , 筋 活 動 や筋 疲 労 を表 す指 標 の 1 つとして用 いられている[2,3].また,医 工 学 分 野 においては筋 電 義 手 や様 々なパ ワーアシスト 装 置 等 の制 御 信 号 とし て 用 い ら れ て い る[4,5].本 研 究 では ,無 侵 襲 で容 易 に計 測 可 能 な 表 面 筋 電 図 計 測 法 に着 目 して研 究 を行 う. 双 極 誘 導 法 は,皮 膚 表 面 の 2 箇 所 に貼 付 した表 面 電 極 から導 出 され2 る 2 点 間 の電 位 差 を計 測 することにより,生 体 信 号 計 測 において同 相 で 混 入 し てくる ハ ムノイズ を 低 減 させることができる .現 在 ,表 面 筋 電 図 は双 極 誘 導 法 によって計 測 されることが多 い. 双 極 誘 導 法 では筋 線 維 走 行 方 向 と直 交 するように 2 つの電 極 を貼 付 し てし まっ た 場 合 , 筋 が活 動 し てい るにも か か わら ず微 小 な信 号 し か 記 録 されない問 題 点 がある事 から,双 極 誘 導 法 で表 面 筋 電 図 を計 測 する際 に は,2 つの電 極 を筋 線 維 走 行 方 向 と平 行 に貼 付 することが望 ましいとされ ている.神 経 筋 接 合 部 を挟 むように 2 つの電 極 を貼 付 した場 合 にも,同 様 の 問 題 点 が あ る こ と が 報 告 さ れ て いる[6][7].また,筋 線 維 走 行 方 向 と電 極 貼 付 方 向 とがずれている場 合 ,導 出 される筋 電 波 形 が歪 んでしまうとい う 問 題 点 も 報 告 さ れ て い る[8].このように ,表 面 筋 電 図 は 皮 膚 表 面 に電 極 を貼 付 するだけで容 易 に計 測 可 能 であるが,電 極 貼 付 に関 しては考 慮 しなければならない点 がある. さら に,計 測 対 象 で ある筋 の種 類 によ っ ても 考 慮 し な ければ なら ない点 がある.骨 格 筋 は筋 束 の配 列 によって平 行 筋 と羽 状 筋 に分 けることができ る.羽 状 筋 では筋 束 は筋 の長 軸 と斜 めに一 定 の角 度 を持 って配 列 してい る.この角 度 を 羽 状 角 と呼 ぶ. そのた め,筋 束 の長 さが筋 長 よ りも 短 くなっ ている[9].そして,羽 状 筋 はその収 縮 強 度 によって羽 状 角 が変 化 すること が報 告 されている[10].つまり,羽 状 筋 では収 縮 強 度 によって皮 膚 表 面 か ら 見 た 相 対 的 な 筋 線 維 走 行 方 向 が 変 動 し て い る 可 能 性 が ある . も し , 皮
3 膚 表 面 から 見 た 相 対 的 な筋 線 維 走 行 方 向 が変 動 し ていた 場 合 ,先 に述 べ た よ う に 筋 線 維 走 行 方 向 と 電 極 貼 付 方 向 とがず れ るた め に 導 出 さ れる 筋 電 波 形 が歪 んでしまう問 題 を引 き起 こす恐 れがある. 一 方 , 電 極 間 隔 を 非 常 に 狭 く し 単 位 面 積 当 た り の 電 極 数 を 高 密 度 に した多 チャンネル表 面 電 極 を用 いて,筋 電 信 号 を計 測 する研 究 が近 年 盛 んに行 われている[11-13].それらの中 に,単 一 な神 経 に由 来 する電 位 に ついての 発 火 頻 度 や発 火 間 隔 といった指 標 を得 るために, 高 密 度 多 チャ ンネル表 面 筋 電 図 か ら 運 動 単 位 の活 動 電 位 を 分 離 する 筋 電 図 デコンポ ジショ ン法 の 開 発 を行 っ ている報 告 がある[14][15].デコンポジションを行 う際 には,運 動 単 位 の活 動 電 位 波 形 が変 動 しないように, 筋 線 維 走 行 方 向 と 電 極 貼 付 方 向 と が 合 致 し て い る こ と が 望 ま し い . し か し , 実 際 に は 筋 の 収 縮 強 度 や 関 節 角 度 の 変 化 に 伴 い 筋 線 維 走 行 方 向 は 変 動 し , 運 動 単 位 の活 動 電 位 波 形 が変 形 し,デコンポジションを難 しくしている. また ,関 節 運 動 に 伴 い先 述 した 神 経 筋 接 合 部 の皮 膚 に 対 する相 対 的 位 置 が移 動 することも報 告 されている[6][16].そのため,関 節 運 動 に伴 い 移 動 し た 神 経 筋 接 合 部 の 位 置 を 推 定 す る 研 究 や 神 経 筋 接 合 部 の 及 ぼ す影 響 を低 減 する方 法 を開 発 する研 究 がなされている[17-20]. 本 研 究 で は , 筋 収 縮 や 関 節 角 度 の 変 化 に 伴 い , 筋 線 維 走 行 方 向 が 変 化 することと神 経 筋 接 合 部 の移 動 することを,筋 の変 動 と呼 ぶ.筋 の運 動 が ダ イ ナ ミ ッ ク で あ れ ば 必 ず 筋 の 変 動 が 起 こ り , 表 面 筋 電 信 号 計 測 に
4 影 響 を与 え,正 確 な信 号 計 測 ができなくなる.従 来 の研 究 は,この問 題 点 に 対 処 す る の では なく , い か に 避 け る か を 主 眼 が 置 か れ て いた . こ れ に 対 し て本 研 究 は ,回 避 方 法 を 開 発 するの で はなく , どのよ う な 状 況 でも 正 確 な信 号 計 測 が 可 能 と なる手 法 を 開 発 する ことを 目 的 と する 画 期 的 な研 究 である.本 研 究 が完 了 すれば,表 面 筋 電 計 測 がより容 易 でかつ信 頼 性 の ある 結 果 が 得 ら れ るよ う に なり ,利 用 場 面 を 画 期 的 に拡 大 する こ とが可 能 となる. 本 研 究 の目 的 は,ダイナミックな筋 の変 動 に対 応 可 能 な筋 電 信 号 計 測 法 の開 発 である.従 来 の筋 電 信 号 計 測 の根 本 的 問 題 点 は,双 極 誘 導 法 の 差 動 増 幅 に 用 いる 2つの 電 極 が予 め決 めら れており,筋 の変 動 に対 応 す る た め に 変 更 で き な い こ と で あ る . こ の 問 題 点 を 解 決 す る た め に , 本 研 究 で は , 筋 線 維 走 行 方 向 に 沿 っ た 皮 膚 表 面 上 の 任 意 の 2 点 か ら 誘 導 さ れる信 号 の差 動 信 号 を得 ようとするものである.具 体 的 には,多 点 同 時 計 測 により得 られた 表 面 筋 電 信 号 から筋 線 維 走 行 方 向 を推 定 し ,推 定 した 筋 線 維 走 行 方 向 に沿 う 2 点 間 の差 動 信 号 を推 定 する. 従 来 , 表 面 筋 電 図 計 測 を 行 う 際 に は , ま ず 解 剖 学 の 成 書 を 用 い て 被 験 筋 の 起 始 と 停 止 や筋 の 形 状 な ど を 調 べて お お ま か な 電 極 貼 付 位 置 を 決 め,次 に多 チャンネルアレイ電 極 を用 いて予 備 的 に表 面 筋 電 図 を計 測 し 神 経 筋 接 合 部 の 位 置 と動 作 に伴 う移 動 範 囲 を 調 べ,神 経 筋 接 合 部 の 影 響 を受 けない場 所 に電 極 を貼 付 することが望 ましいとされている.しかし
5 本 研 究 で 開 発 す る 筋 の 変 動 に 対 応 可 能 な 筋 電 信 号 計 測 法 が 実 現 で き れ ば , マ ト リ ク ス 状 電 極 を 被 験 筋 上 の 皮 膚 表 面 に 貼 付 す る だ け で , 計 測 後 に神 経 筋 接 合 部 の影 響 を受 けない,筋 線 維 走 行 方 向 に沿 った任 意 の 2 点 間 の差 動 信 号 を算 出 することができる.つまり,被 験 筋 がどこにあるか という 解 剖 学 的 知 識 さえ あれば表 面 筋 電 図 計 測 が可 能 とな り,表 面 筋 電 図 計 測 がより簡 便 なものとなる.さらに従 来 の計 測 法 では,筋 の変 動 により 皮 膚 表 面 に貼 付 した電 極 と被 験 筋 との相 対 的 な位 置 関 係 が実 験 開 始 前 の 安 静 時 と 実 験 中 の 筋 収 縮 時 とで ず れ て し まっ て いた 可 能 性 も 考 え ら れ る . し か し 本 計 測 法 を 用 い れ ば , た と え 安 静 時 と 筋 収 縮 時 で 皮 膚 表 面 の 電 極 と被 験 筋 との相 対 的 な位 置 関 係 がずれたとし ても,対 応 可 能 である. 本 研 究 では ,仮 想 単 極 誘 導 法 を用 いて計 測 した表 面 筋 電 信 号 から筋 線 維 走 行 方 向 を推 定 する手 法 を開 発 した.そして筋 電 図 モデルを用 いて 生 成 し た 模 擬 筋 電 図 に 対 し て 推 定 方 法 を 適 用 し , 開 発 し た 推 定 法 の 妥 当 性 を 確 認 し た . 続 い て , 実 際 に 膝 関 節 屈 曲 時 お よ び 伸 展 時 の 外 側 広 筋 の 表 面 筋 電 図 に 推 定 法 を 適 用 し ,筋 線 維 走 行 方 向 を 推 定 し た .推 定 し た 筋 線 維 走 行 方 向 に 沿 う 電 極 が マト リ ク ス状 電 極 中 に 存 在 し ない 場 合 がある問 題 点 を解 決 するため,スプライン関 数 を用 いて電 極 が存 在 しない 位 置 での 筋 電 信 号 の 推 定 を 行 った .最 後 に推 定 した電 極 間 の 筋 電 信 号 を用 いて,推 定 した筋 線 維 走 行 方 向 に沿 う差 動 信 号 の算 出 を行 った. 第 2 章 で は , 次 章 以 降 に 必 要 な 筋 収 縮 と 筋 電 図 に 関 す る 基 本 的
6 な 知 見 に つ い て 述 べ る . 第 3 章 で は , 本 研 究 で 提 案 す る 仮 想 単 極 誘 導 法 と , 仮 想 単 極 誘 導 法 か ら 得 ら れ た 信 号 を 用 い た 筋 線 維 走 行 方 向 推 定 法 に つ い て 述 べ る . 第 4 章 で は , 開 発 した筋 線 維 走 行 方 向 推 定 法 の有 用 性 について検 証 するために ,既 知 信 号 として生 成 した 模 擬 筋 電 図 に推 定 法 を適 用 する. 第 5 章 で は , 実 際 に膝 関 節 屈 曲 時 および伸 展 時 の外 側 広 筋 の表 面 筋 電 図 を 仮 想 単 極 誘 導 法 によ り計 測 し ,その筋 線 維 走 行 方 向 を 本 推 定 法 によ り推 定 する.推 定 結 果 よ り本 推 定 法 により筋 線 維 走 行 方 向 が推 定 可 能 であることを検 証 する. 第 6 章 では,マトリクス状 電 極 下 の任 意 の2点 に対 する信 号 を,スプライ ン 関 数 を 用 いて 推 定 す る . さ ら にそ の 推 定 精 度 は , 推 定 値 と実 測 値 を 比 較 して行 う. 最 後 に 第 7 章 で は ,筋 の変 動 に対 応 可 能 な筋 電 信 号 計 測 法 の開 発 を 目 的 と し た 本 研 究 か ら 得 ら れ た 結 果 に つ い て 統 括 す る と と も に , 今 後 の 課 題 に つ い て 言 及 す る .
7
第
2 章 筋 収 縮 と 筋 電 図 に 関 す る 知 見
2.1 諸 言
本 章 で は , 次 章 以 降 に 必 要 な 筋 に 関 す る 基 礎 的 な 知 見 を 整 理 す る .具 体 的 に は ,筋 の 構 造 と 筋 収 縮 の 発 生 機 序 ,筋 の 種 類 に よ る 筋 収 縮 の 違 い , そ し て 筋 電 図 の 計 測 方 法 に つ い て 述 べ る .2.2 筋 の 構 造
筋 は 横 紋 筋 と 平 滑 筋 に 分 類 さ れ る . さ ら に 横 紋 筋 は 骨 格 筋 と 心 筋 に 分 類 さ れ る . 骨 格 筋 が 張 力 を 発 生 す る 構 造 上 の 最 小 単 位 は 筋 節 で あ る . 筋 節 は 長 さ が 2~3μm, 直 径 が 1~2μm 程 度 の 円 柱 状 な い し 多 角 柱 状 で あ り , 長 い 方 向 を 筋 線 維 の 長 軸 方 向 に 向 け て 並 ん で い る . 筋 原 線 維(muscle fibril)は , 筋 節 が 非 常 に 多 数 , 直 列 に 連 な っ て で き て い る . し た が っ て , 筋 節 が 短 く な る と 筋 原 線 維 が 短 縮 す る . す な わ ち , 個 々 の 筋 節 の 収 縮 の 合 計 が 筋 原 線 維 全 体 の 収 縮 と な る . 筋 原 線 維 は 多 く の 筋 節 が 連 な っ て お り 非 常 に 長 い . 筋 節 の 連 な り が 多 い ほ ど , 筋 の 収 縮 速 度 は 早 く , 収 縮 に よ っ て 短 縮 す る8 長 さ も 大 き い . 図 1 筋 の構 造 の概 略 図 (断 面 図 ) 図 1 に 示 す よ う に , 筋 線 維 (muscle fiber)は , 筋 原 線 維 が 多 数 束 ね ら れ て 構 成 さ れ て い る . 筋 線 維 は 収 縮 す る 能 力 が 特 に 発 達 し た 細 胞 で あ る .筋 線 維 の 内 部 に は ,筋 線 維 の 長 軸 方 向 に 配 列 し た 筋 原 線 維 が 数 百~数 千 本 束 ね ら れ て お り , そ の 直 径 は 10~100μm で あ る .筋 原 線 維 は 筋 線 維 の ほ ぼ 全 長 に わ た っ て 伸 び ,そ の 端 は 細 胞 膜 に 終 わ っ て い る .そ れ ぞ れ の 筋 線 維 は ,細 胞 膜 の す ぐ 表 面 を ,基 底 膜 と い う 薄 い 細 胞 外 基 質 の 層 で お お わ れ て い る .ま た ,基 底 膜 の 上 に は , 筋 線 維 1 本 1 本 を 包 ん だ り , 筋 線 維 間 の 隙 間 を 埋 め た り す
9 る よ う な 結 合 組 織 が あ る . こ の 結 合 組 織 は 筋 内 膜 と 呼 ば れ て い る . 筋 束(muscle bundle)は 筋 線 維 が 数 十 本 集 ま る こ と で 構 成 さ れ て い る .筋 束 の 周 囲 は ,筋 周 膜 と い う 結 合 組 織 で 包 ま れ て い る .さ ら に ,筋 束 が 多 数 集 ま っ て ,上 腕 二 頭 筋 や 外 側 広 筋 な ど の ,名 前 の 付 い た 筋(muscle)を 構 成 し て い る .筋 の 表 面 は ,筋 上 膜 で お お わ れ て い る .こ の よ う に ,筋 線 維 1 本 ず つ は 筋 内 膜 ,筋 線 維 の グ ル ー プ で あ る 筋 束 は 筋 周 膜 ,筋 束 の 集 合 で あ る 筋 全 体 は 筋 上 膜 で 包 ま れ ,こ れ ら の 結 合 組 織 は 張 力 を 伝 達 す る .筋 の 両 端 は ,腱 と な っ て 骨 に 付 着 し て い る 場 合 が 多 い が ,筋 が 直 接 骨 に つ い て い た り ,皮 膚 や 筋 膜 に 終 わ っ て い た り す る 場 合 も あ る[9].
2.3 骨 格 筋 の 収 縮
先 述 し た よ う に ,筋 は 横 紋 筋 と 平 滑 筋 に 分 類 さ れ る .さ ら に 横 紋 筋 は 骨 格 筋 と 心 筋 に 分 類 さ れ る . こ れ ら の 筋 の 中 で 関 節 運 動 に 関 わ っ て い る の は 骨 格 筋 で あ る . 骨 格 筋 の 収 縮 は 脊 髄 の 中 に あ る α 運 動 ニ ュ ー ロ ン (alpha-motor neuron)の 興 奮 か ら 始 ま る . α 運 動 ニ ュ ー ロ ン が 興 奮 す る と , そ の 興 奮 イ ン パ ル ス が 神 経 軸 索(nerve axon)を 伝 わ り ,筋 線 維 と つ な が10 る 神 経 筋 接 合 部(neuromuscular junction)の シ ナ プ ス 前 膜 に 達 す る .す る と ,小 胞 の 内 容 物 で あ る 化 学 伝 達 物 質 の ア セ チ ル コ リ ン が 放 出 さ れ る . ア セ チ ル コ リ ン は 神 経 筋 接 合 部 の 筋 線 維 側 に あ る 筋 終 板 に 作 用 し , 筋 線 維 の 細 胞 膜 の イ オ ン 透 過 性 を 変 え 脱 分 極 電 位 を 誘 発 さ せ ,活 動 電 位 が 発 生 す る .筋 線 維 に 活 動 電 位 が 発 生 す る と , 筋 収 縮 が 起 こ る[21] . 通 常 ,1 つ の 筋 線 維 に は 1 ヶ 所 の 神 経 筋 接 合 部 が 存 在 し ,1 つ の α 運 動 ニ ュ ー ロ ン に 対 し て ,多 数 の 筋 線 維 が 繋 が っ て い る .こ れ ら 1 つ の α 運 動 ニ ュ ー ロ ン に 支 配 さ れ た 筋 線 維 群 は 1 つ の 単 位 と し て 機 能 す る . そ の た め , こ れ ら α 運 動 ニ ュ ー ロ ン と 筋 線 維 群 を ま と め て 運 動 単 位 と 呼 ぶ[22].運 動 単 位 は ,筋 張 力 制 御 の 最 小 基 本 単 位 で あ る [23]. 図 2 に 運 動 単 位 の 概 略 図 を 示 す . 図 2 運 動 単 位
11 筋 張 力 は ,個 々 の 運 動 単 位 か ら 発 生 す る 張 力 の 総 和 で あ る .運 動 単 位 は『 全 か 無 か の 法 則 』に 従 い ,興 奮 す る か し な い か の デ ジ タ ル 的 な ふ る ま い を す る こ と か ら ,筋 張 力 を 変 化 さ せ る に は ,運 動 単 位 の 発 射 頻 度 か 活 動 す る 運 動 単 位 の 数 を 変 化 さ せ る 必 要 が あ る . 筋 張 力 の 上 昇 に 伴 い , 新 た な 運 動 単 位 が 活 動 を 始 め る こ と を 活 動 参 加 と い う .ま た ,筋 張 力 を 増 加 さ せ て い く と ,あ る 決 ま っ た 順 序 で 運 動 単 位 の 活 動 参 加 が 起 こ る .運 動 初 期 に 活 動 を 始 め る の は ,運 動 ニ ュ ー ロ ン の サ イ ズ が 小 さ く 支 配 し て い る 筋 線 維 数 も 少 な い 運 動 単 位 で あ る .こ れ と は 逆 に ,運 動 後 期 に 活 動 を 始 め る の は ,運 動 ニ ュ ー ロ ン の サ イ ズ が 大 き く 支 配 し て い る 筋 線 維 数 も 多 い 運 動 単 位 で あ る . こ れ を サ イ ズ の 原 理 と 呼 ぶ . 発 射 頻 度 と 活 動 参 加 の ど ち ら の 制 御 を 用 い て 筋 張 力 の 調 整 を 行 う か は 筋 に よ っ て ,ま た 筋 の 収 縮 強 度 に よ っ て 異 な る .精 密 な 制 御 が 必 要 と な る 手 先 な ど の 小 さ な 筋 で は , 運 動 単 位 の 発 射 頻 度 を 調 節 す る こ と で 筋 張 力 の 制 御 を 行 う 場 合 が 多 い .一 方 ,姿 勢 の 保 持 や 歩 行 動 作 に 必 要 と な る 大 き な 筋 で は , 活 動 に 参 加 す る 運 動 単 位 の 数 を 調 節 す る こ と で 筋 張 力 の 制 御 を 行 っ て い る . つ ま り 筋 張 力 は , 行 お う と す る 運 動 や 動 作 の 種 類 及 び 目 的 に 応 じ て , 運 動 単 位 の 発 射 頻 度 や 活 動 参 加 の 数 を 調 節 す る こ と で 制 御 さ れ て い る .
12
2.4 平 行 筋 と 羽 状 筋
関 節 運 動 に 関 与 し て い る 筋 は 骨 格 筋 で あ る .骨 格 筋 は筋 束 の配 列 によって平 行 筋 と羽 状 筋 に分 けることができる. 図 3(a)に平 行 筋 ,図 3(b) に羽 状 筋 の概 略 図 を示 す. (a) (b) 図 3 平 行 筋 と 羽 状 筋 (a) 平 行 筋 , (b) 羽 状 筋13 平 行 筋 で は 筋 の 長 軸 方 向 と平 行 に 筋 束 が 走 っ てい るた め 筋 束 は筋 の 全 長 とほぼ等 し くなる.しかし ,羽 状 筋 では筋 束 は筋 の長 軸 と斜 めに一 定 の角 度 (羽 状 角 )を持 って配 列 している.そのため,筋 束 の長 さが筋 長 より も短 くなっている.羽 状 角 とはすなわち,筋 の作 用 方 向 と筋 線 維 走 行 方 向 が な す 角 度 を 示 し てい る[24].羽 状 角 は筋 収 縮 に伴 い増 加 することが報 告 されている[10].図 4 に安 静 時 と収 縮 時 の羽 状 筋 の概 略 図 を示 す.図 4 中 の破 線 矢 印 A は腱 が引 っ張 られる方 向 を,実 線 矢 印 B は筋 が腱 を 引 っ張 る方 向 を示 している. (a) (b) 図 4 収 縮 に よ る 羽 状 角 の 変 化 (a) 安 静 時 , (b) 収 縮 時
14 羽 状 角 が大 きくなると,筋 が腱 を引 っ張 る方 向 と腱 が引 っ張 られる方 向 (力 を 発 揮 した い方 向 )が離 れてし まい,力 が分 散 し てし まう . 一 般 的 な傾 向 として,立 位 姿 勢 の維 持 などにおいて抗 重 力 機 能 を担 う下 肢 筋 群 には 羽 状 筋 が多 い[25].一 方 ,大 きな関 節 角 度 変 化 を伴 った運 動 が要 求 され る関 節 に配 置 される筋 には平 行 筋 が多 い[26].
2.5 筋 電 図 と 計 測 方 法
筋 の活 動 電 位 を 導 出 ・記 録 したものを筋 電 図 という.心 電 図 ,脳 波 など ととも に ,臨 床 診 断 な どに 広 く応 用 さ れて いる.筋 電 図 検 査 に よ り,筋 とそ れ を 支 配 す る 運 動 神 経 だ け で な く , 中 枢 神 経 組 織 の 診 断 , 予 後 判 定 等 の検 討 が可 能 である. ま た , 随 意 的 な 運 動 を 行 っ た 際 に 発 生 する 筋 電 図 と は 異 な り , 生 体 に 電 気 的 ,機 械 的 または磁 気 的 な刺 激 を与 え た ときに誘 発 される筋 電 図 を 誘 発 筋 電 図 と呼 ぶ.誘 発 筋 電 図 の振 幅 の変 化 より筋 や神 経 筋 接 合 部 の 活 動 水 準 の診 断 や,同 一 神 経 を 2 箇 所 刺 激 したときの潜 時 の差 より神 経 の伝 導 速 度 を求 めることができる. 筋 電 図 の 計 測 方 法 は ,大 きく 分 け ると 筋 に針 , また はワイ ヤ を 挿 入 し て 計 測 する針 筋 電 図 と,皮 膚 表 面 に貼 り付 けた電 極 を用 いて計 測 する表 面15 筋 電 図 がある.図 5 に電 極 の種 類 とそれぞれの計 測 方 法 について示 す. (a) (b) 図 5 電 極 の 種 類 (a) 針 電 極 (b)表 面 電 極
16 針 筋 電 図 は,生 理 学 ,整 形 外 科 学 の領 域 では,一 般 筋 電 図 診 査 の標 準 的 方 法 で,個 々の運 動 単 位 活 動 電 位 の識 別 が可 能 である.したがって, 筋 収 縮 に伴 う運 動 単 位 の発 火 状 況 を分 析 することができる.また,測 定 範 囲 が狭 いため,局 所 的 な情 報 のみを得 ることができる.しかし,運 動 時 など は,皮 膚 と筋 の相 対 的 位 置 が変 化 するため,筋 に損 傷 を与 える可 能 性 や, 苦 痛 を与 えることがある. こ れ に 対 し て , 表 面 筋 電 図 は , 複 数 の 運 動 単 位 か ら の 活 動 電 位 を 同 時 に無 侵 襲 で,計 測 することができる. 計 測 方 法 もとても容 易 であり, 皮 膚 表 面 に電 極 を貼 り付 けるだけでよいため,筋 収 縮 時 に痛 みもなく,筋 活 動 のモニタ リングにも 広 く用 いら れる.しか し ながら ,電 極 直 下 周 辺 に存 在 す る 複 数 の 運 動 単 位 の 活 動 電 位 を 全 て 足 し た 信 号 を 計 測 し て し ま う た め , 個 々の 運 動 単 位 の活 動 の 様 子 を知 るた めには複 雑 な信 号 処 理 が 必 要 と なる.
2.6 表 面 筋 電 図 の 誘 導 方 法
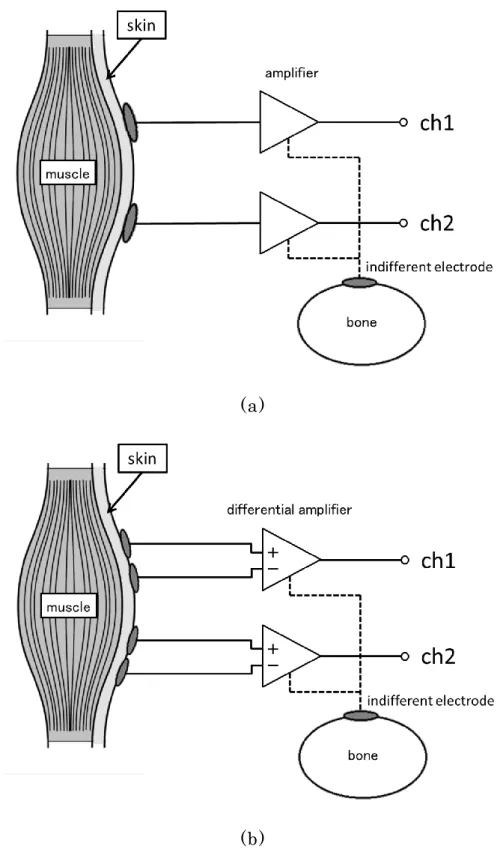
筋 電 図 の誘 導 方 法 に は,単 極 誘 導 と双 極 誘 導 がある . 本 研 究 で提 案 する仮 想 単 極 誘 導 法 については第 3 章 にて説 明 する.図 6 にそれぞれの 導 出 方 法 の概 略 図 を 示 す.17
(a)
(b)
図 6 筋 電 図 の 誘 導 方 法 (a)単 極 誘 導 (b)双 極 誘 導
18 単 極 誘 導 は測 定 したい筋 の皮 膚 上 に貼 り付 けた1 つの電 極 と,電 気 的 に 関 係 の な い 部 分 に 貼 り 付 け た 不 関 電 極 と の 間 に 発 生 す る 電 位 を 測 定 するものである.これに対 し,双 極 誘 導 は測 定 したい筋 の皮 膚 表 面 の 2 箇 所 に貼 付 した表 面 電 極 から導 出 される 2 点 間 の電 位 差 を測 定 する方 法 である[27].こうすることで,2 つの電 極 に混 入 してくる同 相 信 号 成 分 であ るハムノイズを除 去 することができる.
2.7 積 分 筋 電 図
動 作 分 析 な ど を 行 う 際 に 表 面 筋 電 図 を 用 い る 場 合 に は , 筋 の 放 電 量 および放 電 のタイミングから,どの筋 がどの時 点 でどの程 度 活 動 したのかを 知 るために平 均 振 幅 を求 める.平 均 振 幅 の特 徴 量 とし ては,自 乗 平 均 平 方 根(Root Mean Square: RMS)と整 流 平 滑 化 (Averaged Rectified Value: ARV)の 2 つがある[28].RMS は,一 定 の時 間 範 囲 の筋 電 信 号 を二 乗 して,範 囲 内 の平 均 を求 めた後 ,平 方 根 をとった量 である.
ARV は,信 号 の振 幅 の絶 対 値 をとった波 形 (整 流 波 )を,一 定 の時 間 範 囲 で 積 分 , あ る い は , ロ ー パ ス フ ィ ル タ を か け て 平 滑 化 し た も の で あ る .
歴 史 的 には,積 分 筋 電 図(Integrated EMG: IEMG)と表 現 されるものも
19 図 7 に表 面 筋 電 図 を積 分 筋 電 図 に変 換 する処 理 の流 れを示 す.図 7(a) は 生 体 表 面 に 貼 り付 けた 表 面 筋 電 図 よ り導 出 し 差 動 増 幅 を 行 っ た 表 面 筋 電 図 である.図 7(b)は図 7(a)を整 流 化 した整 流 波 である.図 7(c) は 図 7(b) に ロ ー パ ス フ ィ ル タ に よ る 平 滑 化 処 理 を 行 っ た も の で あ る . IEMG は表 面 筋 電 図 の外 形 のような波 形 となる. (a) (b) (c) 図 7 積 分 筋 電 図 処 理 の 流 れ (a) 表 面 筋 電 図 , (b)整 流 波 , (c)積 分 筋 電 図
20
2.8 結 言
本 章 では以 降 の論 文 に必 要 な筋 収 縮 と筋 電 図 についての基 礎 的 な知 見 ,そし てその 解 析 方 法 に ついて 記 述 し た . 具 体 的 には, 筋 収 縮 の発 生 機 序 について説 明 し た.さら に,筋 の種 類 による筋 収 縮 の違 いについても 述 べ た . ま た , 筋 電 図 の 計 測 方 法 と 表 面 筋 電 図 の 誘 導 法 の 違 い に つ い て説 明 し,積 分 筋 電 図 についても簡 単 に説 明 した.21
第
3 章 筋 線 維 走 行 方 向 推 定 法 の 開 発
3.1 諸 言
本 章 で は , 仮 想 単 極 誘 導 法 と 開 発 し た 筋 線 維 走 行 方 向 推 定 法 の 原 理 に つ い て 記 述 す る . 本 研 究 で 開 発 し た 筋 線 維 走 行 方 向 推 定 法 は こ の 仮 想 単 極 誘 導 法 に よ り 計 測 し た 表 面 筋 電 信 号 の 特 定 の 電 極 間 の 差 動 信 号 の 伝 達 時 間 差 を 利 用 し て 筋 線 維 走 行 方 向 を 推 定 す る 手 法 で あ る .3.2 仮 想 単 極 誘 導 法
マ ト リク ス 状 電 極 を 用 い て 表 面 筋 電 図 計 測 を 行 う 際 に , 双 極 誘 導 法 を 用 いれば,皮 膚 表 面 の 2 箇 所 に貼 付 した表 面 電 極 から導 出 される 2 点 間 の 電 位 差 を 計 測 す ることによ り , ハ ムノイ ズ を 低 減 させる ことが できる .し かし,双 極 誘 導 法 では差 動 増 幅 に用 いる 2 つの電 極 があらかじめ決 めら れてし まっているため,関 節 運 動 に伴 う 筋 の変 動 や神 経 筋 接 合 部 の移 動 に 追 従 す る こ と は で き ず 計 測 さ れ る 表 面 筋 電 図 が 歪 む 可 能 性 が あ る . 単 極 誘 導 法 な ら こ の 問 題 は 起 こ ら な い が , ハ ム ノ イ ズ が 混 入 し て い て も 除 去 できずそのまま計 測 されてしまう.22 そこ で, 本 研 究 で は 従 来 の 双 極 誘 導 法 と は異 な り, マトリク ス状 電 極 の 各 電 極 から導 出 された信 号 と基 準 電 極 (Electrode R)から導 出 された信 号 (基 準 信 号 )とを差 動 増 幅 した信 号 を記 録 する仮 想 単 極 誘 導 法 を提 案 する.仮 想 単 極 誘 導 法 は デ ジ タ ル 脳 波 計 の 計 測 方 法 を 表 面 筋 電 図 計 測 に 応 用 し た 計 測 法 で あ る .デ ジ タ ル 脳 波 計 で は 各 電 極 に差 動 増 幅 器 が接 続 されており、すべての電 極 からの信 号 とある共 通 の基 準 電 位 との 間 で差 動 増 幅 が行 われる. 図 8 に従 来 の双 極 誘 導 法 を,図 9 に仮 想 単 極 誘 導 法 を示 す.仮 想 単 極 誘 導 法 では,記 録 された信 号 の中 から任 意 の2つの信 号 の差 動 信 号 を 求 めることで基 準 信 号 が打 ち消 され,任 意 の電 極 間 において双 極 誘 導 信 号 と同 様 の信 号 を得 ることができる. 図 9 に示 す電 極 A の信 号 と電 極 B の差 動 信 号 は,(AR)の信 号 と ) (BR の信 号 の差 動 を取 ることによって求 められる.
)
1
(
)
(
)
(
A
R
B
R
A
B
このように任 意 の電 極 間 の差 動 信 号 を算 出 することができる. 上 記 の よ う に , 本 研 究 で 提 案 す る 仮 想 単 極 誘 導 法 で は 計 測 後 に 任 意 の 2 つ の 電 極 を 選 び , そ の 電 極 間 で の 差 動 信 号 を 算 出 す る こ と が 可 能 と なる.本 誘 導 法 により,マトリクス状 電 極 の隣 り合 う電 極 間 だけでなく,2 つ あるいは3 つ離 れた電 極 間 での差 動 信 号 や,斜 めに配 置 された電 極 間 で23 の差 動 信 号 を算 出 することが可 能 となった. 図 8 従 来 の 双 極 誘 導 法 図 9 仮 想 単 極 誘 導 法
3.3 筋 線 維 走 行 方 向 推 定 法
本 研 究 で 開 発 し た 筋 線 維 走 行 方 向 推 定 法[29]は,まず,仮 想 単 協 誘 導 法 を用 いて計 測 された表 面 筋 電 信 号 か ら特 定 の組 み合 わせの電 極 間24 の差 動 信 号 を算 出 する.これらの差 動 信 号 の伝 達 時 間 差 は,筋 線 維 と電 極 列 との 間 の 相 対 的 な角 度 に 起 因 し て い る .そ こ で , 伝 達 時 間 差 を 求 め るた めに 得 ら れた 差 動 信 号 同 士 の 相 互 相 関 関 数 を 求 め る . そし て , 求 め た相 互 相 関 関 数 がピーク値 をとる時 刻 から筋 線 維 走 行 方 向 を 推 定 するも のである. 本 研 究 で 開 発 し た 筋 線 維 走 行 方 向 推 定 法 の 詳 細 な 説 明 を 以 下 に 示 す. 図 10 筋 線 維 走 行 方 向 推 定 法 の 概 略 図
25 まず,筋 線 維 走 行 方 向 と電 極 貼 付 方 向 を図 10 のように仮 定 する.筋 線 維 走 行 方 向 は 実 線 矢 印 , 電 極 貼 付 方 向 は 破 線 矢 印 で 表 し て いる . また , 図 10 中 の○A,○B ,○C ,…,○G は計 測 に用 いるマトリクス状 電 極 の電 極 を示 している. 筋 線 維 走 行 方 向 と 電 極 貼 付 方 向 とが な す角 度 を
と す る . ま ず , 電 極F
E
間 の 差 動 信 号 を
, 電 極E
B
間 の 差 動 信 号 を
, 電 極C
E
間 の差 動 信 号 を
とする. また,電 極E
F
間 と電 極E
B
間 の筋 電 信 号 の伝 導 距 離 の差 をd
1, 電 極E
B
間 と 電 極E
C
間 の 筋 電 信 号 の伝 導 距 離 の差 をd
2と す る . これらより,線 分 FB を斜 辺 とする直 角 三 角 形 より)
2
(
sin
1d
d
線 分 BC を斜 辺 とする直 角 三 角 形 より)
3
(
cos
2d
d
が成 り立 つ. 次 に ,t
1を
と
の 相 互 相 関 関 数 が ピ ー ク 値 を と る 時 刻 ,t
2 を
と
の相 互 相 関 関 数 が ピ ーク 値 を とる時 刻 とす る. また ,筋 線 維 伝 導 速 度 をv
とする. すると,
間 では速 度v
の筋 電 信 号 が距 離d
1を時 間t
1かけて移 動26 したことになる.同 様 に
間 では,速 度v
の筋 電 信 号 が距 離d
2を時 間t
2 かけて移 動 したことになる.よって,)
4
(
1 1v
t
d
)
5
(
2 2v
t
d
が成 り立 つ.以 上 の 式(2)(3)(4)(5)より,)
6
(
tan
2 1 1
t
t
を得 る.3.4 結 言
本 章 では本 研 究 で提 案 する仮 想 単 極 誘 導 法 ,及 び,本 研 究 で開 発 し た 筋 線 維 走 行 方 向 推 定 法 につ いて 述 べ た . 仮 想 単 極 誘 導 法 とは デジタ ル脳 波 計 の計 測 方 法 を表 面 筋 電 図 計 測 に応 用 した計 測 法 であり, マトリ クス状 電 極 の各 電 極 から導 出 された信 号 と基 準 電 極 から導 出 された信 号 とを差 動 増 幅 した信 号 を記 録 する誘 導 法 である.仮 想 単 極 誘 導 法 を用 い れ ば , 多 点 同 時 計 測 に よ り 得 ら れ た 表 面 筋 電 信 号 か ら 任 意 の 電 極 間 の 差 動 信 号 を計 測 後 に 算 出 することができる .本 研 究 で開 発 した 筋 線 維 走 行 方 向 推 定 法 は,仮 想 単 協 誘 導 法 を用 いて計 測 された表 面 筋 電 信 号 か27
ら 特 定 の 組 み合 わ せ の 電 極 間 の 差 動 信 号 を 算 出 し , 得 ら れ た 差 動 信 号 の 相 互 相 関 関 数 の ピ ーク 値 の時 間 差 か ら 筋 線 維 走 行 方 向 を 推 定 す るも のである.
28
第
4 章 模 擬 筋 電 図 を 用 い た 筋 線 維 走 行 方 向 推 定 法
の 妥 当 性 の 検 証
4.1 諸 言
本 章 では,第 3 章 で述 べた筋 線 維 走 行 方 向 推 定 法 の妥 当 性 の検 証 に ついて述 べる.具 体 的 な方 法 としては,まず筋 電 図 モデルを用 いて伝 導 さ せる角 度 を 5deg 刻 みで変 化 させた模 擬 筋 電 図 を生 成 した.生 成 した模 擬 筋 電 図 の伝 導 角 度 を本 研 究 で開 発 した筋 線 維 走 行 方 向 推 定 法 により 推 定 することで,本 推 定 法 の妥 当 性 を検 証 した.4.2 模 擬 筋 電 図 の 生 成
本 研 究 で用 いる筋 電 図 モデルでは以 下 を仮 定 している. (1) 活 動 電 位 は,筋 線 維 上 を双 極 子 が伝 導 することで発 生 する (2) 筋 線 維 と皮 膚 表 面 に貼 付 された電 極 との間 の空 間 は一 様 な空 間 である. (3) 観 測 される筋 電 図 は,活 動 電 位 の線 形 和 である. 図 11 に本 研 究 で使 用 した筋 電 図 モデルについての概 要 図 を示 す.I
は 電 流 源 強 度[A] ,
は 導 電 率[S/m],r
は 電 極 か ら 双 極 子 の 正29 極 子 までの距 離[m],
r
は電 極 から双 極 子 の負 極 子 までの距 離[m]を表 す.活 動 電 位 V は式 (7)により求 められる[30].)
7
(
1
1
2
r
r
I
V
図 11 筋 電 図 モデル 図 12 に式 (7)より得 られる模 擬 筋 電 図 の基 本 波 形 を示 す.この基 本 波 形 は電 極 直 下 20mm の深 さを走 行 している 1 本 の筋 線 維 を支 配 してい る 1 つの運 動 単 位 があり,その運 動 単 位 が 1 度 だけ発 火 した状 況 を仮 定 している.30 図 12 模 擬 筋 電 図 基 本 波 形 本 研 究 で 生 成 す る 模 擬 筋 電 図 は 発 揮 筋 力 を 10%MVC(Maximum Voluntary Contraction) と想 定 した.そこで,先 行 研 究 を参 考 に模 擬 筋 電 図 に含 まれる運 動 単 位 数 を 10,各 々の運 動 単 位 が支 配 している筋 線 維 数 を1本 ,各 々の運 動 単 位 の発 火 頻 度 を 5Hz から 20Hz に設 定 し た[31].また,双 極 子 の正 電 荷 と負 電 荷 間 の距 離 は 1mm,伝 導 速 度 は 3m/s から 6m/s に設 定 した[30][32].さらに,各 々の運 動 単 位 から生 じる 筋 電 信 号 が 同 じ 伝 導 経 路 を た どら な いよ う に
r
の値 を 設 定 し た . ま た ,全 て の 筋 線 維 が 皮 膚 表 面 と 平 行 に 走 行 し て い る と 仮 定 し , 筋 線 維 走 行 方 向 も一 様 であると仮 定 した.発 生 した活 動 電 位V
を皮 膚 表 面 に貼 付 した 16ch マトリクス状 電 極 の電 極 毎 に算 出 した. 模 擬 筋 電 図 のサンプリング周 波 数 は 10kHz に設 定 した.計 測 に使 用 する電 極 には,電 極 中 心 間 距 離 10mm のマトリクス状 電 極 を想 定 し模 擬31
筋 電 図 を生 成 した.また,本 研 究 では,模 擬 筋 電 信 号 が図 10 で示 す電
極
E
F
間 を通 過 するように模 擬 筋 電 図 を生 成 した.4.3 模 擬 筋 電 図 を 用 い た 筋 線 維 走 行 方 向 推 定
伝 導 角 度 を 0deg から 90deg まで 5deg 刻 みで変 化 させた模 擬 筋 電
信 号 を 生 成 し , 生 成 し た 模 擬 筋 電 信 号 の 伝 導 角 度 を 本 研 究 で開 発 し た 筋 線 維 走 行 方 向 推 定 法 を用 いて推 定 した. また,筋 線 維 走 行 方 向 推 定 法 の 妥 当 性 の検 証 と合 わせて,3.3 章 にて 述 べた 相 互 相 関 関 数 を求 めるのに用 いる差 動 信 号 の最 適 なセグメ ント長 についても同 時 に検 討 した.これは, 実 際 に筋 線 維 走 行 方 向 推 定 法 を用 いて表 面 筋 電 図 から 筋 線 維 走 行 方 向 を 推 定 する際 に ,1 回 の計 測 で得 ら れ た 表 面 筋 電 信 号 か ら よ り 多 く の 筋 線 維 走 行 方 向 推 定 を 行 う こ と を 想 定 し ている か ら で ある .よ り多 くの 筋 線 維 走 行 方 向 推 定 を 行 い , その推 定 結 果 を加 算 平 均 することにより誤 差 の低 減 が可 能 となる.本 研 究 で述 べる セ グ メ ン ト 長 と は , 表 面 筋 電 信 号 を 任 意 の 時 間 で 切 り 分 け た 時 の 時 間 の 長 さを示 している.本 研 究 では表 面 筋 電 図 の周 波 数 帯 域 が5Hz~500Hz, つまり周 期 が2ms~0.2s であることからその半 周 期 の 0.1s を中 心 に 0.05s, 0.1s,0.15s,0.2s の 4 種 類 のセグメント長 から最 適 なセグメント長 の検 討 を行 った.
32 本 研 究 で 開 発 し た 筋 線 維 走 行 方 向 推 定 法 の 妥 当 性 , 及 び 最 適 な セ グメント長 の検 証 方 法 は以 下 のとおりである.まず,0deg から 90deg まで の各 伝 導 角 度 において 25 回 模 擬 筋 電 図 を生 成 する.次 に,各 々の模 擬 筋 電 図 において 0.05s,0.1s,0.15s,0.2s の 4 種 類 のセグメント長 の差 動 信 号 を 算 出 す る . 算 出 し た 差 動 信 号 を 用 い て 相 互 相 関 関 数 を 求 め , そ れ ぞ れ の セ グ メ ン ト 長 で の 筋 線 維 走 行 方 向 推 定 を 行 う . 得 ら れ た 推 定 結 果 か ら 本 研 究 で 開 発 し た 筋 線 維 走 行 方 向 推 定 法 の 妥 当 性 , 及 び 最 適 なセグメント長 について検 証 する.
4.4 模 擬 筋 電 図 を 用 い た 筋 線 維 走 行 方 向 推 定 結 果
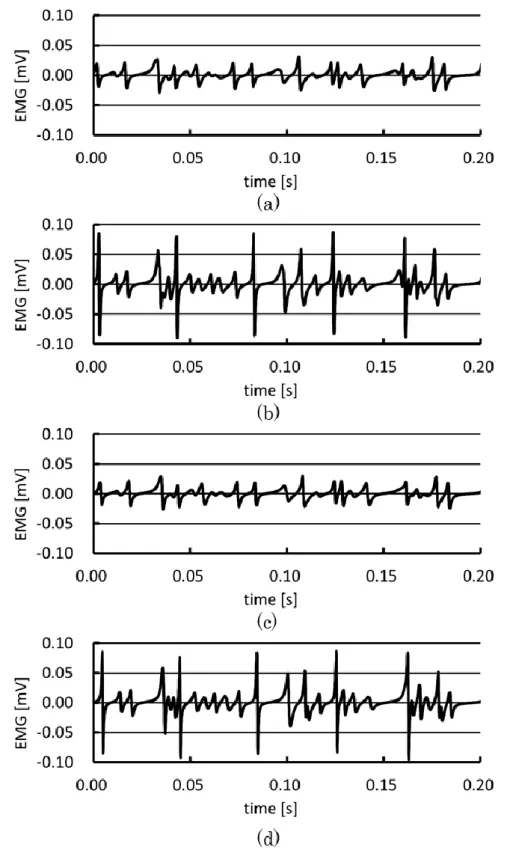
筋 電 図 モデルにより生 成 した模 擬 筋 電 信 号 を図 13 に示 す.図 14 は 得 ら れ た 各 信 号 を 差 分 し た 結 果 を 示 す . こ の 結 果 は 各 電 極 間 の 双 極 誘 導 信 号 に等 しい信 号 が得 られているものと考 えられる.33
図 13 生 成 した模 擬 筋 電 信 号
34 (a) (b) (c) 図 14 模 擬 筋 電 信 号 の差 分 結 果 (a):
B
A
,(b):C
A
,(c):D
A
この結 果 から ,B
A
とC
A
の相 互 相 関 関 数 とD
A
とC
A
の 相 互 相 関 関 数 を求 めた.図 15 に上 記 の 2 つの相 互 相 関 関 数 を示 す.この35 相 互 相 関 関 数 が ピー ク 値 を と る時 刻
t
1とt
2 か ら 模 擬 筋 電 信 号 の 伝 導 角 度 を推 定 した. (a) (b) 図 15 差 動 信 号 の相 互 相 関 関 数 (a):(
B
A
,
C
A
)
,(b):(
C
A
,
D
A
)
36 図 15 の例 では,
t
1
0
.
0007
,t
2
0
.
0006
となる . このt
1とt
2 を 式 (6)に代 入 すると,
4
.
49
0006
.
0
0007
.
0
tan
1
が得 られる. 模 擬 筋 電 図 を 用 いた 筋 線 維 走 行 方 向 推 定 結 果 の平 均 値 と標 準 偏 差 を図 16 に示 す.模 擬 筋 電 図 は伝 導 角 度 を 0deg から 90deg まで変 化 さ せて生 成 した .しか し,65deg 以 上 の伝 導 角 度 においては推 定 に用 いる 2t
の値 が 0 になってしまい,推 定 結 果 を求 めることができなかった.そのた め,推 定 結 果 は 60deg までとなっている.また,各 々の結 果 は 25 回 の平 均 値 である. 図 16 伝 導 角 度 推 定 結 果 の平 均 値 と標 準 偏 差37
4.5 考 察
本 章 ではまず,筋 電 図 モデルにより生 成 した模 擬 筋 電 図 を用 いて本 研 究 で開 発 した筋 線 維 走 行 方 向 推 定 法 の有 用 性 の 検 証 を行 った. 図 16 より,相 互 相 関 関 数 に用 いる差 動 信 号 のセグメント長 が 0.05s の 時 の誤 差 が他 のセグメント長 を用 いて推 定 した結 果 より顕 著 に大 きいこと が分 かった.この誤 差 の原 因 は模 擬 筋 電 図 を生 成 する際 に仮 定 した発 揮 筋 張 力 にあると考 える. 本 研 究 では発 揮 筋 張 力 を 10%MVC と仮 定 して模 擬 筋 電 図 を生 成 し た.つまり,模 擬 筋 電 図 に含 まれる運 動 単 位 数 を 10,各 々の運 動 単 位 の 発 火 頻 度 を 5Hz から 20Hz に設 定 している.そのため,0.05s 内 に含 ま れる運 動 単 位 数 が大 きく異 なってしまっていた可 能 性 が考 えられる.その 結 果 ,他 のセグメント長 と比 較 して誤 差 が大 きくなってしまったのではない かと考 える.よって,10%MVC 発 揮 時 の表 面 筋 電 図 に本 推 定 法 を用 い て筋 線 維 走 行 方 向 を推 定 する際 には,相 互 相 関 関 数 に用 いる差 動 信 号 のセグメント長 は 0.1s 以 上 が望 ましいことが示 唆 された. そこで,1 度 の計 測 で得 られた表 面 筋 電 図 からより多 くの筋 線 維 走 行 方 向 推 定 結 果 を得 ることができるように,第 5 章 で述 べる外 側 広 筋 の筋 線 維 走 行 方 向 推 定 に用 いるセグメント長 は 0.1s とした. また,推 定 可 能 な角 度 にも制 限 があることが分 かった.模 擬 筋 電 図 は伝38
導 角 度 を 0deg から 90deg まで 5deg 刻 みで変 化 させて生 成 した.しか
し ,65deg 以 上 の結 果 においては推 定 結 果 を算 出 できなかった.これは
推 定 に用 いる
t
2 の値 が 0 になってしまったからである.しかし,伝 導 角 度が 5deg から 45deg までの間 では真 値 と推 定 値 との誤 差 が 4deg 以 内 で
あ っ た . 本 研 究 で は 表 面 筋 電 図 を 仮 想 単 極 誘 導 法 で 計 測 す る こ と を 前 提 としている.その際 に使 用 する 電 極 には,電 極 中 心 間 距 離 10mm のマ トリクス状 電 極 を想 定 している.図 17 に示 すように,電 極 中 心 間 距 離 であ る 10mm を底 辺 とする直 角 三 角 形 を考 えた場 合 ,
が 4deg の時 の直 角 三 角 形 の高 さは 0.7mm である.本 研 究 では直 径 1mm の純 銀 線 を用 い てマトリクス状 電 極 を作 製 して いるため,推 定 した筋 線 維 走 行 方 向 が最 大 で 0.2mm ほど電 極 から外 れてしまう. 図 17 推 定 結 果 の誤 差 と電 極 の関 係39 しかし,第 2 章 で述 べたように,筋 とは筋 束 の集 合 体 であり,筋 束 は筋 線 維 の 集 合 体 で あ る . つ ま り , 筋 線 維 走 行 方 向 と 筋 束 , あ る い は 筋 の 走 行 方 向 は 骨 格 筋 に おいて同 じ であると考 え ら れる. 骨 格 筋 の筋 線 維 の直 径 は 10~100μm であるが[33],筋 線 維 の集 合 体 である筋 束 の直 径 は大 腿 四 頭 筋 で 2~5mm であると報 告 されている[34].よって,この 0.2mm 外 れ てし まう という 誤 差 は本 研 究 に おける筋 線 維 走 行 方 向 推 定 には問 題 ない 誤 差 であると考 えられる.このことから,5deg から 45deg までの間 の筋 線 維 走 行 方 向 推 定 結 果 は最 大 で 4deg の誤 差 が生 じるものの妥 当 であると 考 えられる. 以 上 の事 より,本 推 定 法 は推 定 可 能 な角 度 が限 定 されてしまうが, 特 定 の角 度 においては筋 線 維 走 行 方 向 を推 定 可 能 であることが示 唆 された.
4.6 結 言
本 章 では,第 3 章 で述 べた筋 線 維 走 行 方 向 推 定 法 の妥 当 性 の検 証 に つ い て 述 べ た . 筋 電 図 モ デ ル を 用 い て 伝 導 角 度 を 変 化 さ せ た 模 擬 筋 電 図 を 生 成 し , 生 成 し た 模 擬 筋 電 図 の 伝 導 角 度 を 本 研 究 で 開 発 し た 筋 線 維 走 行 方 向 推 定 法 により推 定 することで,本 推 定 法 の妥 当 性 を検 証 し た.結 果 から,相 互 相 関 関 数 に用 いる差 動 信 号 のセグメント長 が 0.05s の 時 の 誤 差 が 他 の 結 果 よ り 大 き い こ と が 分 か っ た . ま た , 伝 導 角 度 が ,40
65deg 以 上 の推 定 においては推 定 結 果 を算 出 できなかった.しかしなが
ら,本 研 究 で開 発 し た筋 線 維 走 行 方 向 推 定 法 は 0.1s 以 上 のセグメント
長 を用 いれば,5deg から 45deg 間 の推 定 結 果 については妥 当 であること が示 唆 された.
41
第
5 章 外 側 広 筋 の 筋 線 維 走 行 方 向 推 定 実 験
5.1 諸 言
本 章 では , 外 側 広 筋 の 表 面 筋 電 図 を 計 測 し ,筋 線 維 走 行 方 向 を 推 定 し た 結 果 に つい て述 べる .ま ず ,仮 想 単 極 誘 導 法 によ り 表 面 筋 電 図 を 計 測 するため,マトリクス状 電 極 を開 発 した.次 に, 仮 想 単 極 誘 導 法 のハムノ イズに対 する有 用 性 について検 討 した.その後 ,第 3 章 で述 べた筋 線 維 走 行 方 向 推 定 法 を用 いて膝 関 節 屈 曲 時 及 び膝 関 節 伸 展 時 の外 側 広 筋 の筋 線 維 走 行 方 向 推 定 を行 った[35].筋 線 維 走 行 方 向 推 定 に用 いる差 動 信 号 のセグメント長 は第 4 章 で行 った模 擬 筋 電 図 を用 いた筋 線 維 走 行 方 向 推 定 実 験 の結 果 から 0.1s とした.5.2 実 験 方 法
羽 状 筋 の筋 線 維 走 行 方 向 を推 定 するため,膝 関 節 角 度 90deg(屈 曲 位 )と 0deg(伸 展 位 )において仮 想 単 極 誘 導 法 を用 いて表 面 筋 電 図 計 測 を行 った.仮 想 単 極 誘 導 法 による表 面 筋 電 図 を計 測 するため,電 極 を 縦 8 個 ×横 8 個 の計 64 個 配 置 したマトリクス状 電 極 を作 製 した.それぞ れ の 電 極 は 直 径 1mm の 純 銀 線 を 用 い て い る . 電 極 は 縦 横 そ れ ぞ れ42 5mm 間 隔 で配 置 されている.各 電 極 にはそれぞれボルテージフォロア回 路 を組 み込 み能 動 化 している. 本 研 究 では ,筋 の 変 動 に 対 応 可 能 な 筋 電 信 号 計 測 法 の 活 動 電 位 伝 導 速 度 計 測 への応 用 を考 慮 し電 極 中 心 間 距 離 を 10mm とした.これは, 電 極 中 心 間 距 離 5mm,サンプリング周 波 数 10kHz で活 動 電 位 伝 導 速 度 計 測 を行 った 場 合 ,先 行 研 究 の報 告[33]にある活 動 電 位 伝 導 速 度 で ある 3~6m/s 間 の分 解 能 が悪 くなってしまうからである.そのため,全 部 で 64 個 ある電 極 の内 ,縦 4 個 ×横 4 個 の計 16 個 の電 極 を用 いて,表 面 筋 電 図 計 測 を行 った. マトリ クス状 電 極 か らの 信 号 を 増 幅 するために,16 チャンネルの筋 電 ア ンプを用 いた.計 測 に用 いた筋 電 アンプの増 幅 率 は 60dB,周 波 数 帯 域 は 4.5Hz~452Hz である. ま た , 仮 想 単 極 誘 導 法 の ハ ム ノ イ ズ に 対 す る 有 用 性 に つ い て 検 討 す る ため,膝 関 節 角 度 屈 曲 位 において計 測 された表 面 筋 電 信 号 の周 波 数 解 析 を行 った. 被 験 者 は健 常 成 人 男 性 1 名 である.利 き足 及 び被 験 足 は右 足 である. 本 実 験 にお ける 計 測 は,皮 膚 表 面 に電 極 を 貼 付 し て計 測 する 表 面 筋 電 図 計 測 法 を利 用 するため被 験 者 に無 侵 襲 である.また.被 験 者 には実 験 の 説 明 を 十 分 に 行 い , 実 験 内 容 に つ い て の 同 意 を 得 た 上 で 実 験 を 行 っ た.
43 開 発 し た マ トリ ク ス 状 電 極 を 上 前 腸 骨 棘 と膝 蓋 骨 上 縁 を 結 ん だ線 上 の 遠 位 1/3 から 3cm 外 側 に固 定 し[10],膝 関 節 屈 曲 位 ・伸 展 位 それぞれ の外 側 広 筋 の表 面 筋 電 図 を計 測 した.図 18 にマトリクス状 電 極 ,基 準 電 極 ,不 関 電 極 の 貼 付 位 置 を 示 す .図 中 の 番 号 は そ れぞ れ マト リ ク ス状 電 極 のチャンネル番 号 を示 している. 図 18 電 極 貼 付 位 置
被 験 者 には椅 坐 位 (股 関 節 角 度 90deg)で膝 関 節 角 度 90deg と 0deg
の 2 肢 位 において 3 秒 間 の等 尺 性 随 意 収 縮 を行 なうよう指 示 した.その
際 の発 揮 筋 張 力 は 10%MVC とした.
44 波 数 は 10kHz で PC に取 り込 み保 存 した. 計 測 した筋 電 信 号 に筋 線 維 走 行 方 向 推 定 法 を適 用 し,膝 関 節 屈 曲 位 と膝 関 節 伸 展 位 での外 側 広 筋 の筋 線 維 走 行 方 向 を推 定 した.
5.3 仮 想 単 極 誘 導 法 の ハ ム ノ イ ズ に 対 す る 有 用 性 検 討
結 果
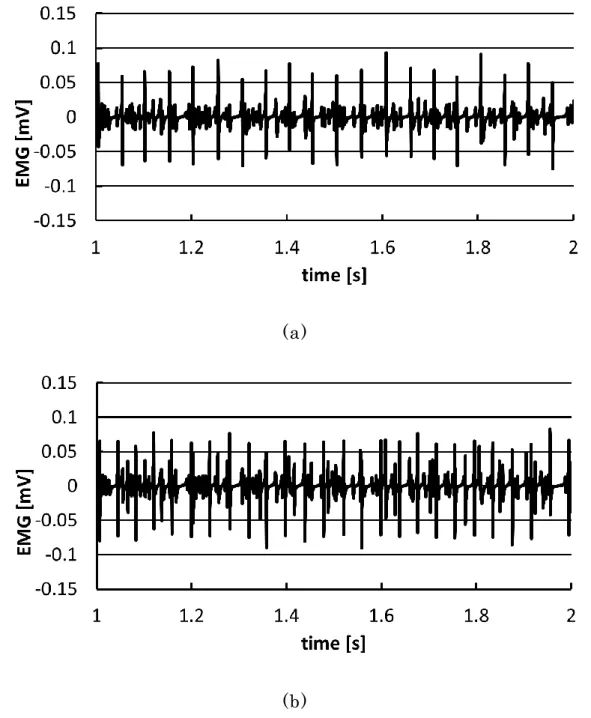
まず, 仮 想 単 極 誘 導 法 のハ ムノイ ズに対 する有 用 性 について 検 討 し た . 図 19 に仮 想 単 極 誘 導 法 により計 測 された信 号 を示 す.また,図 20 に仮 想 単 極 誘 導 法 によ り計 測 された 信 号 から 求 めた 差 動 信 号 を示 す. それぞ れの信 号 の周 波 数 解 析 を行 った.45 (a) (b) 図 19 仮 想 単 極 誘 導 法 により計 測 された信 号 (a):
③
R
,(b):④
R
図 20 仮 想 単 極 誘 導 法 に よ り 計 測 さ れ た 信 号 の 差 動 信 号46 図 21 に
③
R
と④
R
の周 波 数 解 析 結 果 を,図 22 に③
④
の 周 波 数 解 析 結 果 を示 す.③
,④
はそれぞれ図 18 に示 すマトリクス状 電 極 の各 電 極 を示 す. 図 21 では 60Hz にピークがあり,③
R
や④
R
といった仮 想 単 極 誘 導 法 により計 測 した信 号 そのものにはハムノイズ が残 留 していることが分 かった.しかし,図 22 では 60Hz のピークはなくなり,③
④
のように差 動 信 号 を算 出 することでハムノイズが低 減 されることを確 認 できた. (a) (b) 図 21 仮 想 単 極 誘 導 法 に よ り 計 測 さ れ た 信 号 の 周 波 数 解 析 結 果 (a):③
R
,(b):④
R
47 図 22 仮 想 単 極 誘 導 法 により計 測 された信 号 の差 動 信 号 の周 波 数 解 析 結 果
5.4 膝 関 節 運 動 時 の 筋 線 維 走 行 方 向 推 定 結 果
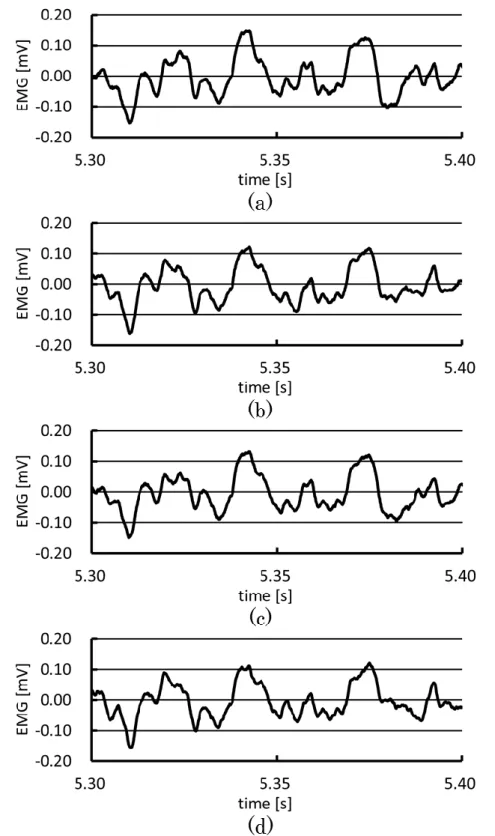
図 23 に仮 想 単 極 誘 導 法 により計 測 した表 面 筋 電 図 の 1 例 を示 す.ま た,図 24 に,図 10 に示 した筋 線 維 走 行 方 向 推 定 に必 要 な差 動 信 号 を 示 す.図 25 に図 24 に示 した差 動 信 号 より求 めた相 互 相 関 関 数 を示 す. 図 25 に示 した例 では,t
1
0
.
0008
,t
2
0
.
0011
である.このt
1とt
2 を 式(6)に代 入 し,
0
.
36
0011
.
0
0008
.
0
tan
1
が得 られる.48
図 23 仮 想 単 極 誘 導 法 により計 測 した表 面 筋 電 図 (a):ch3,(b):ch6,(c):ch7,(d):ch10
49 (a) (b) (c) 図 24 仮 想 単 極 誘 導 法 により計 測 された信 号 の差 動 信 号 (a):
ch
7
ch
3
,(b):ch
6
ch
3
,(c):ch10
ch
3
50 (a) (b) 図 25 差 動 信 号 より求 めた相 互 相 関 関 数 (a):
(ch
7
ch
3
,
ch
6
ch
3
)
,(b):(ch6
ch
3
,
ch10
ch
3
)
本 研 究 では 3 秒 間 の等 尺 性 随 意 収 縮 時 の表 面 筋 電 図 を計 測 してい る . ま た , 筋 線 維 走 行 方 向 推 定 に 用 い る 差 動 信 号 の セ グ メ ント 長 は 第 451 章 で 行 っ た 模 擬 筋 電 図 を 用 い た 筋 線 維 走 行 方 向 推 定 実 験 の 結 果 か ら 0.1s とした.よって,セグメント長 が重 ならないように差 動 信 号 を切 り出 すと, 1 度 の計 測 で 30 回 の筋 線 維 走 行 方 向 推 定 を行 うことができた.模 擬 筋 電 図 を 用 いた 筋 線 維 走 行 方 向 推 定 結 果 よ り,本 推 定 法 によ る 推 定 結 果 が妥 当 であると考 えられる範 囲 は 5deg から 45deg までの間 であることも 分 かっている.そこで,30 回 推 定 を行 い,25 回 以 上 5deg から 45deg 間 の結 果 を算 出 できた推 定 結 果 を結 果 として採 用 した.その結 果 を図 26 に 示 す .A は
:
⑦
③
,
:
⑥
③
,
:
⑩
③
の 組 合 せ で ,B は④
⑪
④
⑦
④
⑧
,
:
,
:
:
の 組 合 せ で 筋 線 維 走 行 方 向 を推 定 した結 果 である.また,図 27 に推 定 した筋 線 維 走 行 方 向 を二 次 元 平 面 上 に矢 印 で描 画 した様 子 を示 す.52 図 26 筋 線 維 走 行 方 向 推 定 結 果 の平 均 値 と標 準 偏 差 (a) (b) 図 27 推 定 結 果 を平 面 に描 写 した様 子 (a)屈 曲 位 (b)伸 展 位
53
5.5 考 察
本 研 究 では,実 際 に計 測 した外 側 広 筋 の表 面 筋 電 図 からの筋 線 維 走 行 方 向 推 定 を 行 っ た . ま ず, 仮 想 単 極 誘 導 法 のハ ムノイ ズ に 対 する 有 用 性 の 検 討 を 行 っ た . 結 果 よ り ,③
R
や④
R
と いっ た 仮 想 単 極 誘 導 法 により計 測 した信 号 そのものにはハムノイズが混 入 していたが,③
④
のように差 動 信 号 を算 出 することでハムノイズ の低 減 を確 認 できた. 次 に外 側 広 筋 の筋 線 維 走 行 方 向 推 定 結 果 について考 察 する. 本 研 究 では,計 測 された信 号 の伝 達 時 間 差 から筋 線 維 走 行 方 向 を推 定 している. そのため ch1 から ch16 までの全 16ch が計 測 されるタイミングについて考 慮 する必 要 がある.本 研 究 で使 用 した AD 変 換 器 のチャンネル間 遅 延 は s
1 . 2 である.つまり,ch1 が計 測 されるタイミングと ch16 が計 測 されるタイ ミ ングとの 間 に31.5
sの 遅 延 が生 じ ていた ことになる. し かし ,本 推 定 法 は 特 定 の 電 極 間 の 差 動 信 号 の 伝 達 時 間 差 ,つ ま り 図 10 に 示 す
と
の相 互 相 関 関 数 がピーク値 をとる時 刻t
1と,
と
の相 互 相 関 関 数 がピ ー ク 値 を と る 時 刻t
2 か ら 筋 線 維 走 行 方 向 を 推 定 す る 手 法 で あ る .
と
及 び
と
は最 大 で 4ch 離 れた組 み合 わせが考 えられる.その際 の チ ャ ン ネ ル 間 遅 延 は8.4
sで あ る . こ の 遅 延 は 本 実 験 の サ ン プ リ ング 周 期 である 100
sと比 較 して十 分 に小 さい値 である ことから,本 実 験 の結 果 に54 影 響 を与 えるものではなかったと考 える. 結 果 よ り , 本 研 究 で 開 発 し た 筋 線 維 走 行 方 向 推 定 法 によ り 電 極
③
の 貼 付 された皮 膚 下 を走 行 する筋 線 維 走 行 方 向 は,膝 関 節 屈 曲 位 におい て 36 [deg],膝 関 節 伸 展 位 において 24 [deg],電 極④
では膝 関 節 屈 曲 位 において 40 [deg], 膝 関 節 伸 展 位 において 26 [deg]であると推 定 された .この 結 果 が 実 際 の筋 線 維 走 行 方 向 と一 致 し ているのか無 侵 襲 で 証 明 することは不 可 能 である.し か し ,解 剖 学 の書 籍 に記 載 されている 外 側 広 筋 の画 像 か ら 推 測 され る筋 線 維 走 行 方 向 は本 研 究 の 結 果 と大 き な 差 異 はないように見 受 けられる. 図 28 に解 剖 学 の書 籍 に記 載 されている 外 側 広 筋 の画 像 を示 す.55 図 28 外 側 広 筋 [文 献 36 より引 用 して改 変 ] ま た , 外 側 広 筋 は 大 腿 骨 の 粗 線 外 側 唇 に 起 始 し , 大 腿 直 筋 と 共 同 の 腱 を 作 り 膝 蓋 骨 , 膝 蓋 靭 帯 を 経 由 し て 脛 骨 の 脛 骨 粗 面 に 停 止 し て い る 筋 である.本 研 究 の 結 果 は膝 関 節 の伸 展 に伴 い 停 止 部 が起 始 部 に 近 づ い て い る こ と を 示 唆 し て い る . 外 側 広 筋 は 膝 関 節 の 伸 展 に 作 用 す る 筋 で あり,この点 も筋 の解 剖 学 的 知 見 と一 致 している. Zipp らは人 間 工 学 について研 究 する上 で満 足 な表 面 筋 電 図 を計 測 す ることができる電 極 貼 付 位 置 と電 極 貼 付 方 向 を決 定 するための lead line を提 唱 している[37].大 腿 部 では内 側 広 筋 の lead line が上 前 腸 骨 棘 と
56
膝 関 節 の内 側 顆 とを 結 んだ線 であるとされている.Stensdotter らはこの 報 告 を 元 に 外 側 広 筋 の 表 面 筋 電 図 計 測 に お い て ,Zipp ら の提 唱 する lead line に対 して外 側 20deg の方 向 に表 面 電 極 を貼 付 している[38].
Zipp らの提 唱 する lead line と本 研 究 でマトリクス状 電 極 の貼 付 位 置 を 決 定 す る の に 用 い た 上 前 腸 骨 棘 と 膝 蓋 骨 上 縁 を 結 ん だ 線 と の 間 に は 20deg 前 後 のずれが生 じている.本 研 究 では,上 前 腸 骨 棘 と膝 蓋 骨 上 縁
を結 んだ線 を基 準 線 と呼 ぶ.本 研 究 では基 準 線 から垂 らした垂 線 を 0deg
とし,時 計 回 りに+域 を取 っている.図 26 の結 果 より,膝 関 節 屈 曲 位 にお
いて筋 線 維 走 行 方 向 はおよそ 40deg である.Stensdotter らの電 極 貼
付 方 向 は,Zipp らの lead line と本 研 究 の基 準 線 との差 を考 慮 すると, 本 研 究 で推 定 した膝 関 節 屈 曲 位 での筋 線 維 走 行 方 向 と概 ね一 致 する. しかし,膝 関 節 伸 展 時 においてはおよそ 20deg 程 ずれる結 果 となってい る.これは膝 関 節 伸 展 に伴 い外 側 広 筋 が収 縮 したためであると考 えられる. また,この結 果 より,従 来 の電 極 貼 付 方 向 では関 節 運 動 に伴 い皮 膚 上 に 貼 付 した表 面 電 極 と筋 線 維 走 行 方 向 とがずれてしまっ ていた可 能 性 が示 唆 された. 本 研 究 では,本 実 験 において得 られた 3 秒 間 の表 面 筋 電 図 のデータを 0.1s 刻 みのセグメント長 に分 けることで 30 回 の推 定 を行 うことができた.そ の 結 果 ,2 通 りの推 定 結 果 を得 ることができた.しかしながら,結 果 として 30 回 中 25 回 以 上 推 定 できた組 合 せは 2 通 りしかなかったとも言 える.こ