超音波レーダーを作ってみよう
製作の手引き
図1.1 はんだづけの要領*
Ⅰ
超音波レーダーの作り方
準備
次の道具を用意しましょう。 1. 小さめのラジオペンチ 2. 小さめのニッパ 3. 30W ぐらいのはんだごて 4. 1mmφ前後のはんだ(錫の割合は 60%ぐらいがグッド) 5. 調整用のマイナスドライバ さて、道具の確認ができたら、ハンダごてを温めておく間に製作する部品の確認をしましょう。資料の図 2.1 の部品図を見ながら実際の部品を眺めておきましょう。部品を種類ごと大きさごとに並べておくと作る とき便利です。道具の使い方と注意事項
特殊で操作の難しい道具は一つも必要ありません。 唯一はんだごての使い方は少しコツがあるのですが、 やってみればすぐになれますからどんどんやってみま しょう。はんだごては十分に温まってから使います。図 1.1 を参照しながらやってみましょう。はんだごてで火 傷しないようにね。 部品の抵抗やダイオードなどのリード線を曲げるとき は、部品のリード線の付根側をラジオペンチで摘まん でから手で曲げます。こうすると部品に付いている線か ら部品本体に不要な力を与えることがなくなるので部 品をいためることがなくなります。不要になった線をニッ パで切り取りますが、この時線材が飛び散るので目に 入らないよう注意しましょう。他人に対しても注意しまし ょう。いよいよ作ってみよう
部品はそろっていましたか?似たような部品がたくさ んあるので色や形に注意しましょう。特に、プラスマイナ スのある部品、IC の足の番号は逆さに見てしまうと動 かなくなるばかりか壊れてしまうので注意しましょう。 どの部品からはんだづけしなければならないとか言 うルールはありません。しかし、ひとつだけ最初にしな ければならない部品があります。部品の下に隠れてし まうジャンパー線です。これだけは一番最初にはんだ づけしましょう。次からは作りやすさから小さくて、背の 低い部品を先にはんだづけしましょう。もしわからないことがあればなんでも質問してください。 1. ジャンパー線とダイオードを最初にはんだづけしてみましょう。プリント基板(15cm×10cm の 板)にはたくさんの穴が開いていてまだ一つも部品が刺さっていません。どこに取り付けたらよ いか図2.2 のパターン面図をよく見て場所を確認しましょう。ダイオードは方向が決まっていま すよ。最初は見本を参考にしながら作業をしましょう。 2. 次は抵抗をつけてみましょう。抵抗は立てて取り付ける場合と寝かして取り付ける場合がありま す。(図2.2~2.3)。抵抗の値の見つけ方は、色に数字が割り付けてあり色を判別して抵抗の 値を探します。下記に色と数字の対応表を載せておきます。 表1 抵抗のカラーコード 色 黒 茶 赤 橙 黄 緑 青 紫 灰 白 銀 数 0 1 2 3 4 5 6 7 8 9 倍率 100 101 102 103 104 105 106 107 108 109 10-2例えば、470kΩの場合は上の表から 4 は黄色で 7 は紫色です。倍率は 104=10000 で黄色と なってこれを並べるて見ると、黄紫黄=470000 になります。最後に抵抗の精度を示す銀色がき ます。ですから、まず抵抗を手にとって見て、銀色が右手側にくるように持つと、左から先ほどの 黄紫黄銀となりますね。別の抵抗の例を図2.1 に載せておきました。 コンデンサーなどをつけていきましょう(図 2.4)。コンデンサーを付け終わると峠は越しました。 あと少しです。 3. IC は足が少し広がっているので机などの平面で押しつけて足の幅を狭めます。IC は上から見 るとへこみが端にあります。この端を基準にして1 番ピンを見つけます(図 2.1 の IC の例を参 照)。1 番ピンの位置は IC の足の数に左右されず、反時計まわりに番号が振られていきます。 IC のうちマイクロコンピュータの IC はソケットを利用して取り付けます。(ソケットにもへこみの印 がありますよ。)もし、皆さんがマイクロコンピュータに興味があって自分でプログラミングしてみ たいと思ったときに、このIC を取り外してプログラムを書き込むことができるようにしました。 4. スイッチもつけましょう(図 2.5)。スイッチは足が出ている方向があるので図と照らし合わせます。 電池をとめるための、丸いピンもつけましょう。穴の方向はどこを向いていても問題ありませんが、 みんな同じ方向にしておくと見た目はかっこいいですね。 5. 順調に行ってますか。さて、数字を表示する7セグメント LED を取り付けます。小数点を表示す るドット部分が右下になるようにします。LED を取り付ける前に、一番最初に取り付けたジャン パー線が正しく取り付けられているか再度確認しましょう。 6. 超音波センサーの取り付けです。超音波センサーは送信用と受信用があるのに加えて取り付 け足にプラスマイナスがあるので資料の図2.1 と見比べて付けましょう。はんだづけ面積が今ま でよりも広いので基板を十分温めてからさっと付けます。センサーは送信と受信が平行になるよ うに取り付けます。ゆがんで付けると測定距離が伸びません。 7. 最後に電池のスナップをつけて終わりです(最後ということで失敗しやすいのが+-を間違える ことです。電気の世界では赤色がホット側と言って、普通は+側を示します)
確認
さて電池をつないで使ってみたいところですが、ぐっと我慢して、その前にもう一度部品の取りつけが間 違っていないか、はんだづけのはんだが飛び出してとなりとくっついていないかよく確認してみましょう。少 し休憩してから確認作業をしたほうが、気分転換ができて見落としていたものも見つかるかもしれません。 確認ができたら、電池をつないでスイッチを押してみましょう。数字が出ましたか?調整
配線やはんだづけの不良がなければスイッチを押すと何か表示が出るはずです。それでも何にも表示 が出ない時はすぐに電池を外してもう一度部品の取り付け状態を確認しましょう。 さて、なにかしら数字が出たら次は調整です。壁に向かって、ただし、でこぼこしていないところに向か いましょう。壁からメジャーを当てて、1mで、まず測定してみます。“100”ぐらいの数字が出ていればとりあ えずOK なのですが、測定距離を超音波レーダーが持つ最大能力まで引き出すために次の調整をしま す。数字が表示されている状態で、壁から後ずさりします。そうすると壁からの距離が大きくなるにしたがっ て数値も増加します。ある距離までくると、1 桁目だけが”0”でフリッカ表示になります。この位置が超音波 レーダーで測定できる距離の限界です。このとき、ボリューム(半固定抵抗)をドライバーでゆっくりとまわし て、壁からの距離がさらに大きくなっても距離表示が出るように最良点を見つけます。もしかしたら、最初 のボリュームの位置が最良点かもしれません。 以上の作業ですべて完了です。お疲れ様でした!
Ⅱ
資料
図2.1 部品の外観図 1SS108
注意:この図は配線(プリントパターン)の面です。部品はすべてこの反対側(部品面)に
取り付けます。
ジャンパー線を最初にはんだ付けしましょう。
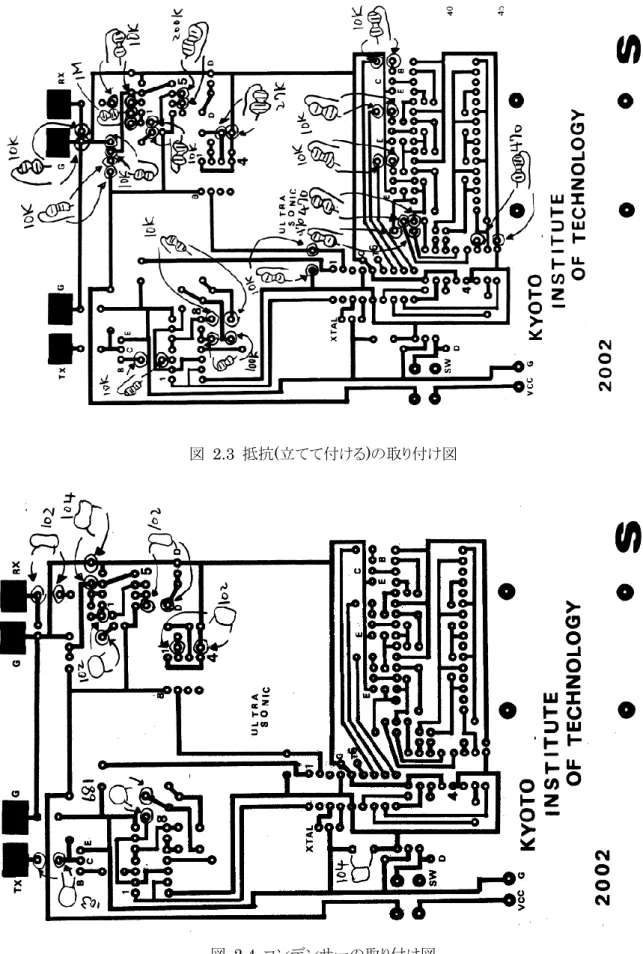
図 2.3 抵抗(立てて付ける)の取り付け図
注意:IC ソケットを使用するのは CPU だけです 部品の足の番号や方向に注意してください スイッチは方向があります。足の出ている方向が外側と内側に! トランジスターと 3 端子レギュレータは外見がそっくりです 図 2.5 IC その他の取り付け
Ⅲ
超音波レーダーのしくみ
概要
本装置は、パルスレーダーの原理により被測定物までの距離を超音波を利用して測定できます。 送受信素子には超音波センサーを利用しています。利用している超音波周波数は40KHz で、測位距 離は40cm からおよそ 3mまでで、分解能 1cm です。動作説明
音波を利用して被測定物へ送信しその反射音を受信します。音波による被測定物までの往復の時間 をパルス数に変換し、これをカウントして距離をデジタル表示します。レーダーの回路構成は、演算処理 回路,40KHz 発生回路,送信回路,受信回路,距離検出回路及び表示回路からなります。回路のブロック 図を図3.1 に示します。 図 3.1 超音波レーダー ブロック回路図 送信部では、40KHz の基準周波数を C-MOS の NAND を用いて CR 発振させます。これは、セン サーの個々のばらつきにより感度ピークが必ずしも40KHzにあるわけではないので、この周波数の周辺 を可変しピークを探せるようにしました。距離測定では演算処理回路(CPU)からの制御により送信を約 470μsec 行います。送信回路はできるだけ高い電圧を送信用センサーに印加したいので、トランジスタ を用いて電源電圧いっぱいでドライブします。 送信部により送信された40KHz の音波は空間を伝わり、目標の測定物にあたってこの一部が反射波 として受信センサーへ帰ってきます。このため微弱な信号を増幅するためにオペアンプを用いて約66dB の増幅率で増幅します。受信回路で増幅された信号は、距離検出回路に送られます。距離測定は距離 検出回路において受信回路からの信号を比較電圧と比較判定するためにコンパレータを用いています。 反射波の信号が比較電圧より高くなるとコンパレータは5V の出力であったものが 0V となり、これを CPU で検出します。この検出タイミングまでを送信制御開始からのCPU のカウンタ数で積算したものが、音波 が往復に要した時間となります。カウンタ数はCPU の命令サイクルを利用します。このため時間の精度は CPU のクロックの精度に依存し、また、プログラムの分岐処理のアンバランスで決まります。また、レーダ ーにごく近接した物は送信エコーのためうまく検出できません。このため、CPU 側でガードタイムを設定し て、40cm 未満の距離検出は無効にします。 CPU では検出回路からのパルスをトリガーとして演算処理を行います。CPU のアーキテクチャは「ハ ーバードアーキテクチャ」と呼ばれるものでワンチップの中にデータバスとプログラムバスが別々に存在し 演算処理回路 PIC16F84 表示回路 74HC4511 受信回路 NJM4580 40KHz 発生回路 74HC00 送信回路 2SC1815 距離検出回路 LM311 TX RX8 8 8
て、内部構造が簡単及び命令速度が速いなどの特徴があります。プログラムはあらかじめこのチップの中 に書き込まれておりこれに基づいて演算処理がなされます。 演算処理されたデータは表示回路にBCD コードで送られます。BCD コードから 7 セグメント LED を 直接ドライブできるIC を用いて表示させます。本装置は乾電池が電源となっているため省電力化を測る 必要があります。このために、ダイナミック点灯方式を採用しています。この方法は、人間の目の残像効果 を利用しています。プログラム制御で3 桁ある表示の 1 桁目だけを 5msec 点灯します。次に1msec すべ ての表示を停止する休止期間を設けます。次に2 桁目だけを先ほどと同じように 5msec だけ点灯します。 次に3 桁目を同じ方法で点灯します。これらの繰り返しで表示を行います。こうしてやれば低い能力の電 源でも十分な表示を行うことが可能となります。 演算処理回路(CPU)に用いたプログラムのソースファイル(アッセンブリ言語で記述)が必要な方は、お っしゃって頂ければコピーをお渡しいたします。
音について
音速は気体の状態により影響を受けます。最も影響があるのが気体温度です。音速は絶対温度の平 方根に比例します。乾燥空気中では331.45m/s(0℃)*ですが、温度係数は 1 度上昇あたり 0.607m/s の 増加となります。例えば次のようなことが考えられます。冬に(気温 0℃)の時に測定した値を記録しておい て、夏(30℃)にもう一度測定するとすれば気温の差は 30℃ですから、0.607×30=18.21m/sとなって 331.45+18.21=349.66m/sと速くなります。このことから、冬に 1m を測定して、夏にもう一度測ってみると 約4cm も短く表示されます。 また、気体の音速度は圧力にはほとんど無関係です。理科年表を参照して みましょう。参考文献
「PIC 活用ガイド」後閑哲也 技術評論社 2001 超音波センサーで利用したマイクロコンピュータの親切な解説が載っています。 「実装技術」小林龍夫 CQ 出版社 1983 http://www.microchip.co.jp/ マイクロコンピュータのデータやプログラム開発のためのツールなどをダウンロードできます。 http://www.national.com/JPN/ http://www.njr.co.jp/ http://www.niec.co.jp/ http://www.paralightled.com/ 「理科年表」 国立天文台編 丸善 1995 物理から生物などいろいろなデータの宝庫 これはおもしろい必見!