社団法人 電子情報通信学会
THE INSTITUTE OF ELECTRONICS,
INFORMATION AND COMMUNICATION ENGINEERS
信学技報
TECHNICAL REPORT OF IEICE.
CIELAB 色空間に基づく輝度を排除した色相画像の生成法
木下 裕磨
†貴家 仁志
†† 東京都立大学システムデザイン学部情報科学科〒191-0065 東京都日野市旭ヶ丘 6-6
E-mail:
†{ykinoshita,kiya}@tmu.ac.jp
あらまし
本稿では,照明光源に依存しない物体色の情報をのみ記録した RGB カラー画像推定を目的とし,一般の
ディジタルカメラにより撮影された RAW 画像から照明光源の輝度の影響を排除した色相画像を生成する手法を提案
する.人間の視覚が持つ色の恒常性を計算機上で再現することは未だ達成できておらず,カメラにより記録される画像
の色は,撮影時の照明条件に影響を受ける.さらに,カメラ内における非線形な処理は,撮影される RGB 画像の色を
変化させる.提案法では,シーンに合わせて正確にホワイトバランス調整を行い,その後,CIELAB 色空間における
明度および彩度の均一化を行う.これらの処理により,照明光源の輝度の影響を排除し,CIELAB 空間における色相
のみが各画素で異なる色相画像を生成できる.提案法は,最終的な色相画像の画素値が sRGB 色空間に収まるよう考
慮しつつ処理を行うため,一般的なディスプレイを用いてシーンの色相情報を適切に表示することを可能とする.2 組
の実画像を用いた色相画像生成実験により,提案法が輝度の影響を排除した色相画像を生成できることが確認される.
キーワード カラー画像処理, 色の恒常性, CIELAB 色空間, RGB 色空間, 色相画像
Luminance-Independent Hue Image Generation Method Based on
CIELAB Color Space
Yuma KINOSHITA
†and Hitoshi KIYA
†† Department of Computer Science, Faculty of Systems Design,
Tokyo Metropolitan University, 191-0065, Tokyo, Japan
E-mail:
†{ykinoshita,kiya}@tmu.ac.jp
Abstract
In this paper, we propose luminance-independent hue-image generation method based on the CIELAB
color space, from RAW images taken by commonly-used digital cameras. The color constancy of human vision
has not been reproduced on a computer yet. In other words, colors of images captured by cameras are affected
by lighting conditions at the time of shooting. Furthermore, non-linear operations in the cameras change colors
of resulting RGB images. In the proposed method, the white balance is adjusted precisely according to a lighting
condition of scene and then the brightness and saturation in CIELAB color space are equalized. The proposed
method enables us to display the hue information of a scene appropriately on a typical display because pixel values
are processed in the proposed method so that all pixel values of a final hue image are within the sRGB color gamut.
A hue image generation experiment using two pairs of real images show that the proposed method can produce a
hue image without the effect of luminance.
Key words
Color Image Processing, Color Constancy, CIELAB Color Space, RGB Color Space, Hue Image
1.
は じ め に
ディジタルカラー画像処理の分野においては,画像強調など の種々の画像処理法により入出力画像間で色の歪みが発生する ことが知られている.この色歪みの回避を目的として,色相を 考慮した様々な画像処理法が既に提案されている [1]∼[5].色 相を考慮した画像処理法では,入力画像が正しい色相を持つと 仮定し,入出力間で色相差が生まれないよう処理を行う.例え ば,植田ら[4]は,RGB色空間中の等色相平面上で画素値を変 化させることで,入力画像の色相を変化させずに画像強調を行 う手法を提案してる.一方,ディジタルカメラによって撮影さ れる画像の色は,照明光源の強度や分光分布,カメラ内部にお ける色補正処理や階調補正処理の影響を受ける.したがって, これらの影響を排除しつつ物体の持つ色情報を獲得する手法の確立が,より写実的なディジタル画像処理アルゴリズムの開発 や,様々な条件下で撮影された画像から物体認識を行うアルゴ リズムの開発のために必要である. ディジタルカメラとは異なり,人間の視覚には,照明光源が 変化しても色の見えは大きく変わらない,色の恒常性という性 質がある[6], [7].例えば,人間は,視覚系に到達する色信号の スペクトル組成が大きく変化しているにも関わらず,昼光の青 空の下でも夕方の赤い空の下でも木々の葉を緑として認識でき る.しかしながら,一般に用いられるカメラによる撮影では, このような色の恒常性を実現するには至っていない.本研究は, 照明光源の変化に頑健なディジタル画像の撮影,すなわち計算 機による色の恒常性の実現を目的に行われている. 色の恒常性の実現問題は,しばしば,シーンにおける物体表 面の分光反射率を推定する問題として取り扱われる[8].これ は,分光反射率がわかれば,照明光源に依存しない正確な物体 色を計算することができるからである.しかしながら,ディジ タルカラー画像が持つ3次元情報からの高次元の分光反射率の 推定は容易でない.また,物体色の情報をRGBカラー画像と して表示することを目的とした場合,高次元の分光関数を再度 3次元へマッピングすることへなるため,分光関数を推定する ことは冗長である. このような背景から,本稿では,物体色のみの情報を記録し たRGBカラー画像推定を目的に,一般のディジタルカメラに より撮影されたRAW画像から照明光源の輝度の影響を排除し た色相画像を生成する手法を提案する.提案法により生成され る色相画像は,CIELAB空間における明度および彩度がすべて の画素で一定であり,色相のみが各画素で異なる.すなわち, 色相画像は,色相情報のみを記録した画像である.提案法では, 照明条件の差異による色相の変化を抑制するため,撮影時の照 明に合わせたホワイトバランス調整を行う.さらに,撮影され た画像の明度および彩度を均一化する処理においては,最終的 な色相画像の画素値がsRGB色空間に収まるよう考慮しつつ処 理を行う.提案法により生成される色相画像は,シーンの物体 色を確認するためのみならず,色相補正法[5]への応用や深層 学習におけるデータの前処理などへの応用が期待できる. 提案法の有効性を評価するため,2組の実画像を用いた実験 を実施した.実験の結果,提案法は,シーン中の物体の一部に 影が差すよう撮影したRAW画像から影の境界で色の変化がほ とんどない色相画像を生成できることが明らかとなる.すなわ ち,提案法により輝度の影響を排除した色相画像が生成できる ことが示される.また,提案法におけるホワイトバランス調整 の精度が,生成される色相画像の品質に大きく影響することが 確認される.
2.
準
備
本章では準備として,まず一般的なディジタル画像撮影の流 れを簡潔に説明し,RGB色空間およびCIELAB色空間につい て要約する.その後,一般的なディジタルカメラを用いて物体 色を取得する際の課題を述べる. 2. 1 ディジタル画像撮影の流れ 図1に,ディジタルカメラを用いた場合における代表的な画 像撮影の流れを示す. ディジタルカメラの撮像センサから出力される値xcを直 接記録した画像を,RAW画像と呼ぶ.撮像センサには,R, G, Bに対応する波長の光のみを透過させるカラーフィルタ Hr(λ), Hg(λ), Hb(λ)が配置されており,ある色c∈ {r, g, b}に 対応したセンサ出力xcは,次式で与えられる. xc= s ( ∆t ∫ ∞ 0 Ec(λ) dλ ) (1) ここで,λは光の波長,∆t∈ [0, ∞)はシャッタースピード,Ec はカラーフィルタHcを透過した光の分光放射照度であり,光 源の分光分布P (λ)と物体の分光反射率R(λ)を用いて Ec(λ) = P (λ)R(λ)Hc(λ) (2) として記述できる.また,s : [0,∞) → [0, 1]はセンサの飽和を 表す関数であり, s(t) = t (0≤ t < 1) 1 (1≤ t) (3) のようにモデル化できる.E(p, λ)は, 一般的なディジタルカメラは,RAW画像に対し,デモザイ キング,ホワイトバランス調整,色空間変換,階調補正などの 処理を施した後,最終的なRGB画像として記録している[9]. これら処理の概略は以下の通りである. デモザイキング カラーフィルタHr(λ), Hg(λ), Hb(λ)はベイ ヤー配列などの規則的なパターンに従ってセンサ上に配置 されているため,RAW画像の1つの画素には,RGB成 分xr, xg, xbのうちいずれか1つのみしか記録していない. デモザイキングは,これらRGB成分を空間的に補間し, 各画素がRGB成分のすべてを持つようにする処理である. ホワイトバランス調整 ホワイトバランス調整は,人間の視覚 が,異なる分光分布を持つ光源の下でも同じ物体の色を同 じ色として知覚する性質(色の恒常性)を考慮し,撮影時の 光源の色が撮影される画像に与える影響を抑制する処理で ある. 色空間変換 ディジタルカメラは,式(2)から確認できるよう に,カラーフィルタHcの特性に依存したRGB値を記録 している.色空間変換では,フィルタ特性に依存したカメ ラ固有のRGB色空間(カメラRGB)から,標準的な色空 間(sRGB色空間やAdobeRGB色空間など)への変換を 行う. 階調変換 階調変換処理では,ディスプレイで色を正しく表示 するためのガンマ補正や,記録できる輝度のダイナミックレ ンジを向上させるためのトーンマッピングなどの非線形処 理を,各画素についてそれぞれ適用する.これら非線形処 理を表す関数は,カメラ応答関数(CRF) h : [0, 1]→ [0, 1]CRF White
Balance Camera RGBto sRGB
Sensor
Irradiance 𝐸𝐸𝑐𝑐 𝜆𝜆 RAW Image sRGB Image
Demosicing
𝑠𝑠 𝑡𝑡 ℎ 𝑡𝑡
𝑥𝑥𝑐𝑐
図1 Imaging pipeline of digital camera
と呼ばれる. 2. 2 RGB色空間 ディジタル画像の符号化には,sRGB色空間[10]やAdobe RGB色空間[11]をはじめとするRGB色空間が一般に利用さ れている.また,個々のディジタルカメラは,カラーフィルタ Hcによって定まるRGB色空間上で色を表現している.これら のRGB色空間上では,R, G, B (0≤ R, G, B ≤ 1)を要素とす る3次元ベクトルCRGB= (R, G, B)⊤として色を表現するこ とができる.RGB色空間はCIE1931 XYZ色空間[12](以下, XYZ色空間)に基づいて定義されている.XYZ色空間では, X, Y, Z≥ 0を要素とする3次元ベクトルCXYZ= (X, Y, Z)⊤ を用いて色を表現する.XYZ色空間からRGB色空間への変 換は次式により与えられる.
CRGB= (f (Rlin), f (Glin), f (Blin))⊤ (4)
ただし,
(Rlin, Glin, Blin)⊤= MCXYZ (5)
である.ここで,Mは3× 3の正則行列であり,f (·)は光– 電気変換関数である.式(5)で得られたCRGBの各要素は, 0≤ R, G, B, ≤ 1となるようクリッピングされる. 例えば,画像符号化に最も広く用いられるsRGB色空間の場 合,変換行列M,および非線形関数f (·)は次式のように定義 される. M = 3.2410 −1.5374 −0.4986 −0.9692 1.8760 0.0416 0.0556 −0.2040 1.0570 (6) f (x) = 12.92x (x≤ 0.0031308) 1.055x1/2.4− 0.055 (otherwise) (7) 2. 3 CIELAB色空間 RGB色空間が画像の符号化のために定義された色空間であ る一方で,CIELAB色空間は,人間の色覚を正確にモデル化す る目的で定義された色空間である.CIELAB色空間は,RGB 色空間と同様に,XYZ色空間に基づいて定義される.
XYZ 色 空 間 の 色CXYZか ら CIELAB色 空 間 の 色C = (L∗, a∗, b∗)⊤への変換は次式により与えられる.
L∗= 116g(Y /Yw)− 16 (8)
a∗= 500 (g(X/Xw)− g(Y/Yw)) (9)
b∗= 200 (g(Y /Yw)− g(Z/Zw)) (10)
ここで,
Hue Image 𝐼𝐼RGB,out
RAW Image 𝑥𝑥𝑐𝑐
White Balance
Demosicing LightnessEqualization ChromaEqualization
CIELAB
Camera RGB XYZ sRGB
𝐼𝐼cam ̂𝐼𝐼XYZ ̃𝐼𝐼LAB
図2 Proposed hue image generation method
g(x) = x1/3 (x > δ3) x 3δ2 +294 (otherwise) , δ = 6 29 (11) であり,(Xw, Yw, Zw)はXYZ色空間における白色点の座標で ある. CIELAB色空間とそれに基づく色差の計算式を用いること で,2色C1, C2間の人間が知覚する色差を定量的に計算する ことができる( [13], [14]参照). 2. 4 問 題 設 定 照明に依存しない物体の色情報,すなわち物体色のみを記録 した画像は,コンピュータビジョンやコンピュータグラフィッ クスの分野において,色相補正法[5]への利用や深層学習におけ るデータの前処理への利用など,様々な分野に応用できること が期待される.人間の視覚は照明条件に関わらず物体色を認識 することができる色の恒常性と呼ばれる性質を持つ一方で,こ の色の恒常性を計算機上で実現することは未だ達成されていな い.シーンにおける物体表面の分光反射率を推定することによ り色の恒常性を実現する取り組みが既に行われているが,RGB カラー画像から分光反射率を推定することは容易でない[8].ま た,物体色の情報をRGBカラー画像として表示することを目 的とした場合,高次元の分光関数情報を推定することは冗長で ある. 加えて,2.1項で述べたディジタルカメラによるデモザイキ ング,ホワイトバランス調整,色空間変換,および階調補正処 理は,得られるRGB画像の色情報に影響を及ぼす.このこと は,カメラにより獲得されたRGB画像から,物体色情報を獲 得することをさらに困難にしている. そこで,本稿では,ディジタルカメラによる処理の影響を受 けていないRAW画像から,照明光源の輝度の影響を排除した 色相画像を生成する手法を提案する.
3.
色相画像生成法の提案
提案する色相画像生成法は,カメラにより記録されるRAW 画像から,光源の輝度に依存しない物体の色相情報のみを記録 した色相画像を生成する. 3. 1 実 行 手 順 図2に,提案する色相画像生成法の概要を示す. 提案法の実行手順は以下の通りである.i 入力RAW画像に対しデモザイキング処理を施し,画像 Icamを得る. ii 画 像Icam が 持 つ カ メ ラRGB色 空 間 上 の 色Ccam = (xr, xg, xb)⊤を,XYZ色空間上の色CXYZ= (X, Y, Z)⊤ へ変換し,画像IXYZを得る. iii IXYZに対し,次式に従いホワイトバランス調整を施し, 画像IˆXYZを得る[15]. ˆ CXYZ= MWBCXYZ (12) ここで,行列MWBは, MWB= M−1A ρD/ρS 0 0 0 γD/γS 0 0 0 βD/βS MA, (13) MA= 0.8951 0.2664 −0.1614 −0.7502 1.7135 0.0367 0.0389 −0.0685 1.0296 (14)
である.また,(ρin, γin, βin)および(ρout, γout, βout)は,
入力画像の白色点Win= (Xw,in, Yw,in, Zw,in)⊤と所望の
白色点Wout = (Xw,out, Yw,out, Zw,out)⊤ を用いて,そ
れぞれ(ρin, γin, βin)⊤ = MAWin, (ρout, γout, βout)⊤ =
MAWoutとして与えられる.本稿では,正確なホワイト
バランス調整のため,入力画像の白色点Winを自動で推
定せず,入力画像中の白色領域を人手で選択しその領域 の平均XYZ値を白色点Winとした.
iv 画像IˆXYZが持つXYZ色空間の色CˆXYZ= ( ˆX, ˆY , ˆZ)⊤
をCIELAB色空間の色CˆLAB= ( ˆL∗, ˆa∗, ˆb∗)⊤へ変換し, 画像IˆLABを得る. v IˆLABに対して,3.3項で述べる明度均一化処理を施し,画 像I˜LABを得る. vi I˜LABに対して,3.4項で述べる彩度均一化処理を施し,画 像ILAB,outを得る.
vii 画像ILAB,outが持つ色CLAB,out= (Lout∗ , a∗out, b∗out)⊤を sRGB色空間の色CRGB,out= (Rout, Gout, Bout)⊤へ変
換し,出力画像IRGB,outを得る. これら処理においては,最終的な色相画像IRGB,outの画素値が すべてsRGB色空間に収まるよう考慮している.以降では,明 度および彩度の均一化処理について説明する. 3. 2 明度の均一化 CIELAB色空間において,色CLAB= (L∗, a∗, b∗)⊤の色相 H∗と彩度C∗は以下のように与えられる. H∗= 0 (b∗= a∗= 0) tan−1(b∗/a∗) (otherwise) (15) C∗=√a∗2+ b∗2 (16) 式(15)より,CIELAB色空間における明度L∗は,色相H∗(お よび彩度C∗)に影響しないことがわかる.したがって,色 �𝑪𝑪LAB 0 𝑎𝑎∗ 𝑏𝑏∗ 𝒟𝒟
(a) Maximization step
Min. 0 𝑎𝑎∗ 𝑏𝑏∗ 𝒟𝒟 𝑪𝑪LAB,out (b) Equalization step 図3 Chroma equalization 相画像生成のための明度の均一化は,明度L∗を定数とす る こ と に よ り 達 成 さ れ る .す な わ ち ,IˆLAB に お け る 色 を ˆ CLAB = ( ˆL∗, ˆa∗, ˆb∗)⊤とすると,明度が均一化された画像 ˜ ILABにおける色はC˜LAB= ( ˜L∗, ˜a∗, ˜b∗)⊤= (α, ˆa∗, ˆb∗)⊤ して 与えられる.本稿では,明度を中間のグレーとするためα = 50 とした. 3. 3 彩度の均一化 彩度の均一化は,入力画像の色相情報および前節で均一 化した明度情報を保ったまま,画像から彩度の差異を取り 除 く こ と を 目 的 と し て い る .式(15)お よ び (16)よ り ,色 (L∗, ma∗, mb∗)⊤, m∈ [0, ∞)は,色(L∗, a∗, b∗)⊤と同じ色相と 明度を持つ.このことから,画像I˜LABの持つ色相と明度を保っ たまま彩度を均一にするためには,全画素に共通の彩度Cout∗ ∈ [0,∞)を用いてCLAB,out= (L∗LAB,out, a∗LAB,out, b∗LAB,out)⊤= ( ˜L∗,C∗out C∗out˜a ∗,Cout∗ ˜ C∗ ˜b∗)とすればよい.ただし,C∗ outの決定にお いては,最終的な色相画像がsRGB色空間の色域Dに収まら ない,または,色相の差を視認することが難しくなる,などの 問題を考慮する必要がある. この理由から,本稿では,すべての画素について,sRGB色 空間に収まる最大のCout∗ (p)を求めた後,それら{Cout∗ (p)}の うち最小のものをCout∗ とする(図3参照).ここで,pは画素 の空間座標を表す.本稿では,{C∗ out(p)}の計算のため二分法 を利用した.
4.
実
験
提案する色相画像生成法の有効性を評価するため,実画像を 用いた実験を実施した. 4. 1 実 験 条 件本実験では,Canon EOS 5D Mark IVを用いて撮影された
2組のRAW画像を用いて,提案法により色相画像を生成した. これら2組のRAW画像は,以下に示す異なる2つの条件下で それぞれ撮影した. • ある光源下で,シーン中の物体の一部に影が差すよう撮影 • 昼光および夕暮れの2種の光源下で撮影 図4に,撮影した画像を示す.ただし,表示のためにデモザイ キングおよび色空間変換の処理を施した.撮影時のシャッター スピード∆tは,カメラの自動露出アルゴリズムに基づき,適
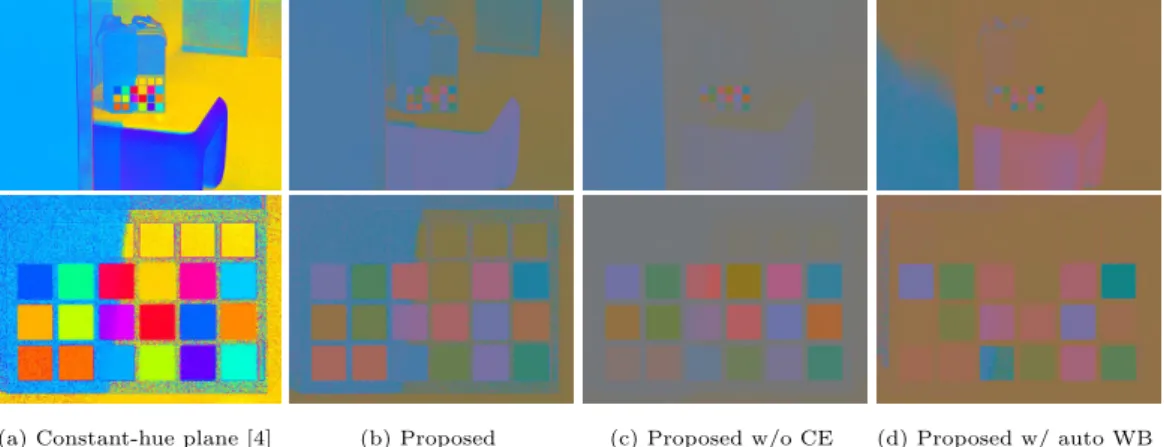
(a) with/without shadow (b) Captured under different light sources. left: daylight, right: sunset. 図4 Input images 正露出となるよう選択した.生成した色相画像の評価は,主観 的に色の差異を確認することにより行った. また,比較のため,文献[4]で用いられる等色相平面に基づ き色相を可視化した画像を用意し,提案法と同様に評価した. 等色相平面に基づく色相は,HSI色空間における色相に相当す る[2]. 4. 2 実 験 結 果 図5に,図4(a)に示すRAW画像から生成した色相画像を 示す.図5(a)を見ると,カラーチェッカー上の影の境目(特に 紫色のパッチ上)で色が変化していることがわかる.したがっ て,等色相平面に基づき色相を可視化した場合には,得られる 色相画像は照明の輝度変化の影響を受けるといえる.一方,提 案法を用いて生成された色相画像は,影の境目で大きな色の違 いが発生することはなかった(図5(b)参照).このことから,提 案法は輝度の影響を排除した色相画像を生成できているといえ る.ここで,図5(a)および(b)のどちらの場合においても,無 彩色の領域(カラーチェッカーの上段)では影の境界で色が変 化していることが確認できる.これは照明光源の色,あるいは 撮影時のノイズによる無彩色領域の色の僅かな変化が,結果と して得られる色相画像の色に大きな変化をもたらすためである. 色相画像においても無彩色領域を無彩色として表示するた めには,提案法における彩度の均一化を行わないことで達成 できる.彩度の均一化を適用しなかった場合の画像(Proposed method without chroma equalization)を図5(c)に示す.この 場合には,入力RAW画像の彩度と色相が保存され明度のみが 均一化されるため,無彩色領域を無彩色として表示することが 可能となる.一方,画像全体で彩度が均一にならないため,色 相の差のみを表示する目的には適していない.
提案法におけるホワイトバランス調整を自動で行った場合 の色相画像(Proposed method with auto white balance)を図
5(d)に示す.図5(d)より,ホワイトバランス調整を自動で行っ た際には,カラーチェッカー上の影の境目(特に青色のパッチ 上)で色が変化していることがわかる.この色の変化は,人手 でホワイトバランス調整を行った場合には発生していない(図 5(b)参照).すなわち,色相画像の生成には,ホワイトバラン スの調整を高精度に実行する必要があるといえる. 図6には,図4(b)に示すRAW画像から等色相平面に基づ き生成した色相画像を示す.等色相平面に基づき生成した2枚 の色相画像を比較すると,昼光のシーンと夕暮れのシーン間で, カラーチェッカー上の左下に位置するパッチの色を含むシーン 全体で色が変化していることがわかる.また,図7には,図 4(b)に示すRAW画像から提案法を用いて生成した色相画像 をそれぞれ示す.提案法を用いて生成した色相画像を比較する と,カラーチェッカー上のパッチの色は大きく変化していない 一方で,空や階段部分などで大きく色が変化していることがわ かる.このことから,提案法を用いた場合でさえ,照明光源の 分光分布に依存しない色相画像の生成は達成できていないとい える.
5.
お わ り に
本稿では,照明光源に依存しない物体色の情報をのみ記録し たRGBカラー画像推定を目的とし,一般のディジタルカメラ により撮影されたRAW画像から照明光源の輝度の影響を排除 した色相画像を生成する手法を提案した.提案法により生成さ れる色相画像は,CIELAB空間における明度および彩度がすべ ての画素で一定な,色相情報のみを記録した画像である.提案 法では,照明条件の差異による色相の変化を抑制するため,撮 影時の照明に合わせてホワイトバランス調整を正確に行う.そ の後,最終的な色相画像の画素値がsRGB色空間に収まるよう 考慮しつつ,CIELAB色空間における明度および彩度を均一化 を行う. 2組の実画像を用いた実験の結果,提案法は,シーン中の物体 の一部に影が差すよう撮影したRAW画像から影の境界で色の 変化がほとんどない色相画像を生成できることが明らかとなっ た.したがって,提案法により輝度の影響を排除した色相画像 が生成できることが示された.また,提案法におけるホワイト バランス調整の精度が,生成される色相画像の品質に大きく影 響することが確認できた.一方,異なる光源下で撮影された2 枚のRAW画像から提案法により生成された色相画像は,異な る色を持つことが確認された.すなわち,提案法を用いた場合 でさえ,照明光源の分光分布に依存しない物体色相画像の生成 は達成できていない.今後は,照明光源の分光分布に依存しな い色相画像の生成を目指し研究を実施すると同時に,分光反射 率推定に基づく物体色推定法との定量的な比較評価実験を進め ていく. 謝辞 本研究はJSPS科研費JP18J20326の助成を受けたも のである. 文 献Con-(a) Constant-hue plane [4] (b) Proposed (c) Proposed w/o CE (d) Proposed w/ auto WB
図5 Resulting hue images (top) and their zoom-ins (bottom) generated from Fig. 4(a)
(a) Hue image for daylight scene
(b) Hue image for sunset scene
図 6 Resulting hue images (top) and their zoom-ins (bot-tom) of boxed region generated from Fig. 4(b) (Constant-hue plane [4])
(a) Hue image for daylight scene
(b) Hue image for sunset scene
図 7 Resulting hue images (top) and their zoom-ins (bot-tom) of boxed region generated from Fig. 4(b) (Pro-posed)
trast Enhancement Using Adaptive Gamma Correction With Weighting Distribution,” IEEE Trans. Image Process.,
vol.22, no.3, pp.1032–1041, Mar. 2013.
[2] S.K. Naik and C.A. Murthy, “Hue-preserving color image
enhancement without gamut problem,” IEEE Trans. Image Process., vol.12, no.12, pp.1591–1598, Dec. 2003.
[3] K. Dabov, A. Foi, V. Katkovnik, and K. Egiazarian, “Color
Image Denoising via Sparse 3D Collaborative Filtering with Grouping Constraint in Luminance-Chrominance Space,” Proc. IEEE Int. Conf. Image Process., pp.313–316, IEEE, Sep. 2007.
[4] Y. Ueda, H. Misawa, T. Koga, N. Suetake, and E. Uchino,
“HUE-Preserving Color Contrast Enhancement Method Without Gamut Problem by Using Histogram Specifica-tion,” Proc. IEEE Int. Conf. Image Process., pp.1123–1127, IEEE, Athens, Oct. 2018.
[5] Y. Kinoshita and H. Kiya, “Hue-Correction Scheme Based
on Constant-Hue Plane for Deep-Learning-Based Color-Image Enhancement,” IEEE Access, vol.8, pp.9540–9550, Jan. 2020.
[6] 富永昌治,“コンピュータビジョンと分光反射率推定,” 光学,
vol.26,no.12,pp.671–676,Dec. 1997.
[7] M. Afifi, B. Price, S. Cohen, and M.S. Brown, “When Color
Constancy Goes Wrong: Correcting Improperly
White-Balanced Images,” Proc. IEEE Conf. Comput. Vis. Pattern Recognit., pp.1535–1544, IEEE, Jun. 2019.
[8] 村上百合,“分光反射率の推定理論,” 日本写真学会誌,vol.65,
no.4,pp.234–239,Aug. 2002.
[9] T. Brooks, B. Mildenhall, T. Xue, J. Chen, D. Sharlet, and
J.T. Barron, “Unprocessing Images for Learned Raw De-noising,” Proc. IEEE Conf. Comput. Vis. Pattern Recognit., pp.11028–11037, Nov. 2018.
[10] IEC, “IEC 61966-2-1:1999 Multimedia systems and
equip-ment - Colour measureequip-ment and manageequip-ment - Part 2-1: Colour management - Default RGB colour space - sRGB,” 1999.
[11] Adobe Systems, “Adobe RGB (1998) Color Image
Encod-ing,” Technical report, Adobe Systems Incorporated., 2005.
[12] CIE, Commission internationale de l’Eclairage proceedings,
Cambridge University Press, Cambridge, UK, 1932.
[13] ISO/CIE, “ISO/CIE 11664-6:2014 Colorimetry-Part 6:
CIEDE2000 Colour-Difference Formula,” 2014.
[14] G. Sharma, W. Wu, and E.N. Dalal, “The CIEDE2000
color-difference formula: Implementation notes, supplemen-tary test data, and mathematical observations,” Color Res. Appl., vol.30, no.1, pp.21–30, Feb. 2005.
[15] B. Lindbloom, “Chromatic Adaptation”.
http://www.brucelindbloom.com/index.html ?Eqn ChromAdapt.html