DOI: http://doi.org/10.14947/psychono.36.26
触覚・身体感覚の錯覚を活用した感覚運動情報の提示技術
雨 宮 智 浩
NTTコミュニケーション科学基礎研究所
Display technologies of sensory-motor information
utilizing touch and somatic illusions
Tomohiro Amemiya
NTT Communication Science Laboratories
Touch, the sensation processed by the somatosensory system, is closely related to the body state. Due to the spatiotemporal characteristics of the somatosensory receptors and the structural constraints of the body, we have sometimes experienced with sensory illusions in touch as well as vision. In this paper, I introduce several techniques to generate illusory sensations which can be exploited to develop information displays. I review the previous find-ings of our experiments of the changes in the haptic perception or body image using the techniques.
Keywords: tactile, touch, sensory illusion, human interface
は じ め に だまし絵や空耳のような本来の客観的特性と異なって 知覚される現象は「錯覚」1と呼ばれ,心理物理学の分野 では脳の情報処理機構を探る手がかりとして,芸術の分 野では世界のとらえ方を問う表現手法としてそれぞれ利 用されてきた。「錯」には「乱れる,間違える」が含意 されるため,字面だけ見れば何か問題が生じている印象 があるが,この仕組みこそが日々の生活に支障を来すこ とがないように脳内に構成される世界を安定させ,即座 に環境に適応することを可能にしている。錯覚の生起に は個人差はあるものの,多くの人がおおむね同様に体験 することができる。そして,錯覚の多くは意識に上るこ となく生じるため,日常生活における錯覚の取り扱い方 は大きく次の二つに分類できる。一つは錯覚の生起を予 期して誤認やヒューマンエラーによる誤操作を回避する ことである。もう一つは錯覚の生起を積極的に活用する ことである。前者の例としては,自動車の運転などでの 見間違いが起こりやすい状況を事前に把握して注意喚起 する取り組みが挙げられる。後者の好例としては,グラ フィックディスプレイで使われるRGB混色による色表 現方法や,主観的な歪みを感じさせずに静止画や音声を 圧縮する方式が挙げられる。このように錯覚は工学の分 野においては限られたリソースで効果的な情報を提示す る原理としてしばしば利用されてきた。 視覚や聴覚以外の錯覚現象も少数ではあるが報告され ており,触覚・体性感覚でもアリストテレスの錯覚(交 差指錯覚)やベルベットハンド錯覚などが古くから知ら れている(Hayward, 2008)。しかしながら,こうした錯覚 が積極的に情報提示インタフェースに応用された事例は ほとんどない。これは触覚・体性感覚には映像ディスプ レイやプロジェクタ,あるいはスピーカやヘッドフォンに 匹敵するような標準的な提示装置が現時点では存在しな い2ため,錯覚体験の発見やシェアが容易でないことが要 因の一つとして考えられる。また,体性感覚への情報提 示が視覚や聴覚と比較してあまり重要視されてこなかっ たという背景もあろう。しかし,近年,触覚提示装置の
Copyright 2017. The Japanese Psychonomic Society. All rights reserved. Corresponding address: NTT Communication Science
Lab-oratories, NTT Corporation, 3–1 Morinosato-Wakamiya, Astugi, Kanagawa 243–0198, Japan. E-mail: amemiya. [email protected] 1 広義には認知バイアスなども含めると考えられる が,本稿では感覚入力に起因するものを扱う. 2 携帯端末に内蔵された振動モータが現時点で最も普 及しているが,提示可能な触覚の表現力は乏しく, 注意喚起のための振動刺激にとどまっている.
技術革新によって高品質な触感生成が容易になりつつあ ることや,接触によって直接的に対象の存在や属性を確 実に把握できること,人間は視聴覚だけでなく五感を中 心とした複数の感覚を通じて世界を理解していることな どから視聴覚の提示技術の高度化に牽引される形で触 覚・体性感覚そして身体感覚への関心が高まっている。 本稿では,知覚過程に内在する「歪み」である錯覚の 特性を積極的に利用した新しい情報提示デバイスの開発 と,それを用いて人間の知覚機構に迫る研究として,筆 者がこれまでに開発した触覚・身体感覚の錯覚を利用し た情報提示技術を中心に,身体に働きかける情報提示手 法について解説する。 触覚の錯覚と情報提示 バーチャルリアリティ(VR)環境で物に触れたよう な感覚を作り出すためには,物に触れたときに発生する 力を計算してPHANToM(Geomagic社)に代表されるロ ボットアーム型の力覚提示装置のトルクを制御するなど して利用者に力を返す方法が一般的に用いられる。ただ し,作用・反作用の法則によって生じる反力を環境に逃 がす必要があるため,利用者と力覚提示装置の両方を地 面などの外部環境に固定しなければならないという物理 的な制約があった。そのため,携帯電話のような外部に 支点を設けていない機器では反力を逃がすことができ ず,従来の力覚提示方法をそのまま適用できないという 問題があった。 そこで,筆者らは錯覚を活用することで物理法則の制 約から解放された情報提示を実現するアプローチを提唱 し,これまでに様々な力覚提示装置を実装してきた (Figure 1)。外部に固定されていない機器で反力を生成 するという命題に対して,「短時間の大きな力」と「長 時間の小さな力」という非対称な力の往来を周期的に繰 り返す「非対称振動発生装置」を試作し,これによって 牽引力感覚を作り出す方法を提案した(雨宮・安藤・前 田,2004)。この非対称振動発生装置は揺動クランクス ライダ機構と呼ばれる機構で構成され,物理的に正逆方 向(たとえば前方と後方)に力を発生するが,時間で平 均すると発生する力は0,つまり,物理的にはどちらの 向きにも牽引力を発生していないことになる。しかし, 「人間は素早い動きには敏感であるが,遅い動きは知覚 しにくい」という知覚の非線形特性によって,この非対 称振動が一方向の牽引力として知覚されることを明らか にしてきた(Amemiya & Maeda, 2008, 2009)。筆者らはこ の錯覚現象を「牽引力錯覚」と名付け,腕を引くような 感覚を作るためには5–10 Hzの非対称振動が効果的であ
る こ と を実 験 か ら 示 し た (Amemiya, Ando, & Maeda, 2008)。この振動を作り出す質点の動きは,屋内型の娯 楽施設のモーションライドの椅子の挙動に似たもので, 着想もそこから得ている。屋内の限られた空間で加速感 を生成するために,椅子を傾けて重力加速度の一部を前 後への「加速度」として模擬する方法がよく用いられる が,その傾いた椅子を利用者に悟られないように元の姿 勢に戻さなければならない。この操作は Wash-outと呼 ばれるが,牽引力錯覚を作り出す非対称振動装置では質 点の位置のWash-outが繰り返されている。 牽引力錯覚を生み出す非対称振動をどの方向に発生さ せるかによって様々な応用が考えられる。たとえば,あ る物体に対して非対称振動を鉛直方向に発生させれば, その物体そのものの重量を変化させることなく,あたか も重くなったように感じさせることができる(Amemiya & Maeda, 2008)3。 また,非対称振動を水平方向に発生させれば,手を引 いて方向を教えてくれる道案内のような適用先が考えら れる(雨宮,2012; Amemiya & Sugiyama, 2010)。道案内 で必要な経路情報はGPSなどの屋外測位技術,地磁気コ ンパス,経路探索アルゴリズムなどすでに携帯電話で利 用可能な機能で得られるものであるが,それをどのよう に指示するかについてはあまり議論がされていない。た とえばカーナビでは矢印や音声によって指示がなされて いるが,これは自動車のような速度や経路がモデル化し やすい場合には適している方法といえる。しかし,歩道 以外を進んだり,体の向きや歩行速度が変化したりする 歩行者に対して,単純に自動車モデルは適応できないた め,歩行者の誘導に同様の指示で十分かは議論する必要 がある。それに加えて,視覚や聴覚に情報を重畳させる ことで,歩行者の情報処理の負荷は増大し,注意が遷移 して危険を招くことも懸念される。これまでにも道案内 の注意喚起の用途で振動触覚刺激が利用されることは あったが,振動触覚刺激を使って誘導情報を伝達するに は単純な振動パターンや組み合わせのように記号的にな らざるを得ず,経路情報や誘導情報の解釈が必要とな る。誘導情報を解釈させない方法としては,不随意な運 動を誘発して方向誘導する方法,たとえばハンガー反射 と呼ばれる皮膚のせん断変形を利用した方法を腰部に適 用して腰を回転させる方法(今・中村・梶本,2016)や, 3 ただし,残念ながら本来よりも軽くなったような感 覚を作ることは難しく,需要が高いと予想される 「荷物を軽く感じさせる」ような応用は実現が困難 なようである.
前庭電気刺激(GVS: Galvanic Vestibular Stimulation)を用 いて歩行者の重心を左右に揺さぶる方法(Maeda et al., 2005)が代表例として挙げられる。一方,力感覚を用い た情報伝達は必ずしも不随意な運動を誘発することはな いが,力の特徴は方向と大きさの2つの性質を持ってい るベクトルであるため,方向を伝えるうえで解釈を必要 としない。牽引力錯覚も力感覚であり同様の性質があ る。そこで,牽引力錯覚に基づく情報伝達が実際の方向 誘導手段として有効かを検証するため,筆者は京都市消 防局,京都府立盲学校と共同で視覚障がい者を対象とし た屋内の歩行経路誘導の実証実験を実施した。実験では 予め設定された経路に向かうように逐一非対称振動の方 向が変化し,それによって生成される牽引力感覚の方向 を手がかりとして迷路状の経路を進行可能かを検証し た。その結果,視覚障がいを有する実験協力者23名中 21名(91%)が事前訓練なしで予め設定されたどおりの 経路に誘導できることが明らかになった(Amemiya & Sugiyama, 2010)。火災,発煙,警告音の発生時では視聴 覚情報が十分利用できないため,そのような状況下では 視覚障がい者に限らず,すべての利用者の歩行誘導支援 に役立つと期待される。 人に手を引かれる状況を考えると,自分自身で手を動 かして情報を能動的に受け取ることもできる。しかしな がら,このような能動的な探索動作によって牽引方向の 理解が促進されるかあるいは減退されるかについては自 明ではない。促進を支持する根拠としては,自身の手を 能動的に動かして触察する触知覚(Active touch)が挙 げられ,触覚の感度を高めるため,手の運動情報を利用 している可能性が考えられる。一方,それとは逆に減退 を支持する根拠としては手の運動によって触覚の方位知 覚が歪む報告(Kappers & Bergmann Tiest, 2013)や,運 動中は閾値付近の触刺激が検出されにくくなる感覚遮断 が生 じ る こ と(Chapman, Bushnell, Miron, Duncan, &
Lund, 1987)が挙げられる。これを検証するために,筆 者らは方位磁石のように手の向きに合わせて牽引する方 向を常時更新して世界座標系で不変となるように制御す るシステムを開発し,手を動かす(能動的な探索を許 す)条件と動かさない条件で方向知覚の精度を比較し た。その結果,探索的に手を動かすことを許すと牽引力 錯覚による方位知覚の精度が上がる,つまり知覚された 牽引方向のばらつきが減少することが明らかになった (Amemiya & Gomi, 2016)。
ここまで見てきた非対称振動装置は一万円札サイズの 箱形,あるいはコンパクトディスク(CD)サイズの円 盤形で,手で握ることを想定した試作機(Amemiya & Maeda, 2008; Amemiya & Sugiyama, 2010)であったが,非 対称振動機構そのものを小型軽量化することは当初から の開発課題であった。単純に小型軽量化すると振動を作 り出す質点の質量やアクチュエータの出力が小さくなる ため,発生する力も小さくなり,牽引力感覚も小さく なってしまう。そこで,小さな力でも十分な牽引力感覚 を担保できるように刺激提示部位の見直しをおこない, 全身の触覚の中でも指先の検出・識別能力が特に高いと いった神経心理学,神経生理学的な知見に注目し,手で 握るのではなく指でつまめるような装置を設計し,揺動 クランクスライダ機構ではなく直動型アクチュエータに よって実現した(Amemiya & Gomi, 2014)。指腹に存在 する触覚受容器の中でマイスナー小体が滑りの予兆を検 出する(Macefield, Hager-Ross, & Johansson, 1996),ルフィ ニ小体が滑りの方向識別に重要な働きを担っている (Johansson, 1978)といったエビデンスをもとに,それら が最も強く反応する周波数帯である数十Hz付近で非対 称振動をさせることで,サイズ比で約1割程度にもかか わらず明瞭な牽引力感覚が生成されることが確認された (Amemiya, 2015; 雨宮,2017; Amemiya & Gomi, 2014)。手 で握る形態で用いた比較的低い周波数の非対称振動では Figure 1. The prototypes of the force display generating an asymmetric oscillation.
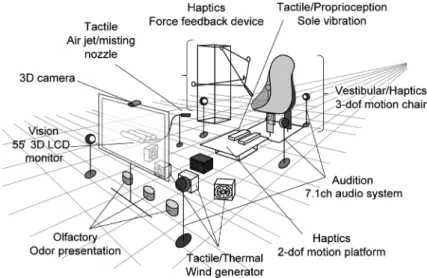
腕そのものが押し引きされるような印象であるのに対し て,指でつまむ形態で用いた比較的高い周波数の非対称 振動では指先が押し引きされてそれが引き金となって手 が動くような印象であり,両者の牽引力感覚に質的な違 いはあるものの,いずれも安定して明瞭な牽引力感覚が 生成されることが確認されている。また,現時点で標準 的な提示装置の存在しない触覚提示装置においては普及 という側面も重要であるため,本稿で紹介した基礎研究 に加え,牽引力錯覚を生み出す装置の実用化や普及に向 けた取り組みも並行して進めている。 身体感覚の錯覚と情報提示 小型・安価で広視野角のヘッドマウントディスプレイ (HMD)の登場をはじめとして近年VR技術に再び注目 が集まっている。こうした装置によって視覚や聴覚に関 しては十分な臨場感を作り出すことに成功しているが, 自分自身がVR空間の中に存在していると感じるために は視覚や聴覚だけでなく五感を中心とした感覚入力と身 体感覚との適切な連関が欠かせない。たとえば,高層ビ ルでの綱渡りのようなVRコンテンツを提供している体 験型施設では,HMDを装着した体験者の体に風を当て たり,VR空間内と対応する実物の綱や土台に触れさせ たり乗せたりといった,視覚や聴覚以外の感覚情報の手 がかりが活用されている。こうした工夫は身体感覚が没 入感に果たす役割の大きさを傍証している。 さらに自己の移動感の創出はVR空間内での物体との距 離感を得るうえで,あるいは体験者の酔いの観点からも 重要である。VR空間内で自分自身の移動に伴って生じる 感覚運動フィードバックを得るためには実際に移動する ことが最も手っ取り早い。しかしながら,VR空間の広さ が半無限であるのに対して実空間は有限であるため,実 空間における移動の仕方を工夫する必要がある。たとえ ば,実空間における歩行者の移動を物理的に相殺する方 法(Iwata, Yano, Fukushima, & Noma, 2005; Iwata, Yano, & Na-kaizumi, 2001)や,歩行速度や歩行方向を気づかれない ように操作するRedirectionと呼ばれる方法(Suma et al., 2011; Matsumoto et al., 2016)が提案されている。これら の方法では自身の足で歩いて移動する動作を活用して歩 行感覚を表現することが可能である。それに対して,筆 者らは身体を動かすことなく受動的な状態で能動的な歩 行感覚(より正確には擬似歩行感覚)を生み出す多感覚 刺 激 の 提 示 方 法 を 検 討 し て き た(Ikei, Abe, Hirota, & Amemiya, 2012)。通常の歩行と異なり,筋への運動指令 のない状態であたかも歩いているような感覚を作り出す には,触覚や自己受容感覚などの多感覚のフィードバッ クが果たす役割が大きくなると考えられる。これを検証 するために,身体の姿勢の変化,下肢への体性感覚入力 などを再現した身体感覚提示デバイスを開発し,立体映 像で撮影した歩行・走行映像とともに座位姿勢で体験で きるシステムを開発した。なお,このシステムでは実際 の歩行時に生じる風や匂いの変化など,実世界での移動 で生じるほとんどの感覚刺激を提示可能である(Figure 2)。 これまでに体験展示を通じて,ほとんどの体験者から強 い歩行・走行感が生じたことが報告されてきた。しか し,予備実験の過程で,実際に歩行したときの身体の上 下変位を事前に記録し,そのまま再現しても違和感が生
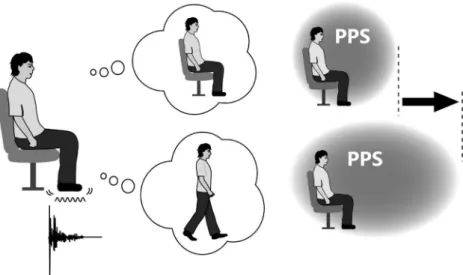
じることが多くの体験者から報告された。そこで主観的 に等価な上下変位量を調べた結果,受動的な座位姿勢で は実際の歩行の約 1/10の上下変位量であることが明ら かになった (Ikei et al., 2014)。このゲイン比の違いは自 己運動に対する遠心性コピーの欠如による感覚抑制の有 無によるものと推測される。 このように単なる記録再生に基づいた忠実な表現だけ でなく,複数の感覚情報をあたかもミキサーが適切にバ ランス調整するような「編集」作業も必要である。編集 作業の方法の一つとして,感覚間相互作用(クロスモー ダル効果)による効果の増強や相殺,あるいは異なる質 の感覚の生成が考えられる。たとえば,広視野に一様の 点群が拡大するような運動刺激が提示されたときに身体 が前方へ移動するような錯覚的な移動感覚が生じるが, それと同時に座面上から提示される振動触覚刺激の移動 速度に応じて前方への移動速度が実際よりも速く(ある い は遅く)知覚されることが確認された (Amemiya, Hirota, & Ikei, 2016)。さらに,タッピングのような時間 変化のみの刺激よりも,空間移動を伴う触覚刺激の方が 効果は大きくなることが確認された。 これ以外の身体の移動に関わる視覚と触覚間のクロス モーダル効果として,傾斜の凹凸が判断しにくい「おば け坂」のような地形の起伏形状を移動しながら判断する 課題において,身体姿勢の手がかりの方が視覚の手がか り(オプティカルフロー)よりも地形の凹凸形状に強く 影響することが確認された(雨宮・広田・池井,2016)。 このような視覚と体性感覚,身体感覚の相互作用はVR 空間を移動する表現において重要な設計指針となると考 えられる。 また,GUI環境でマウスなどの入力装置を使ってカー ソルを操作する場面を考えると,身体がカーソルに投射 された状況と解釈できる。二次元平面である GUI環境 において画面の法線方向に凹凸形状を表現する手段とし て,視覚情報の変調から擬似的に凹凸の感覚を知覚させ る手法であるPseudo-Hapticsが提案されている(Lécuyer, 2009)。Pseudo-Hapticsでは特定の領域を通過するマウス カーソルの動きとマウスの動きの比率を変化させること で凹凸面をなぞったような効果を生成する。一方で,視 覚の時間分解能は触覚に劣るため,視覚情報のみで衝突 のような短時間で生じる事象を表現することは苦手であ る。そこで,筆者は衝突事象に合わせて視触覚に過渡振 動表現を重畳する方法を提案し,それらの刺激属性の組 み合わせや感覚間の提示時間差を調整することによって 衝突感を増大させることを確認した (雨宮,2016)。物 体との衝突時には物体の素材に応じた過渡振動が物体表 面で生じているため,静的な物体の硬さを表現するより むしろ,衝突が生じたときのダイナミクスが知覚的な硬 さに関わることが報告されている(Kuchenbecker, Fiene, & Niemeyer, 2006)が,力覚提示装置を用いない構成に おいても視触覚への過渡振動の提示が衝突感や硬さ感の 生成に寄与することが確認された。 最後に着座状態で生じる擬似歩行感覚が身体に与える 影響について紹介する。われわれの身体を取り囲む空間 は身体近傍空間(Peripersonal space)と呼ばれ,身体か ら離れた領域とは異なる神経生理的,知覚的,運動的な 機能の存在が知られている。たとえば,身体に接近する
音刺激の位置が身体近傍空間の内側のときでは外側のと きより身体表面に提示された刺激への反応時間が短くな ることが知られ,この接近音の位置に応じた反応時間の 変化から身体近傍空間の境界を推定することができる (Canzoneri, Magosso, & Serino, 2012)。また,同様の課題 においてトレッドミル上を歩行する際には静止立位時よ り身体近傍空間の境界が進行方向に拡張されることも報 告されている(Noel et al., 2015)。そこで筆者らは着座姿 勢で振動刺激を足底に与えながら同様の課題で触覚の反 応時間を計測し,物理的に歩行せずに生じる擬似歩行感 覚が身体近傍空間に与える影響を調べた(Figure 3)。そ の結果,接近音が身体から1.2 mにあるとき,足底に歩 行時に録音した歩行音(足音)を振動刺激として与えた 場合では反応時間の短縮が生じたのに対し,足音の提示 開始時間を非同期にした場合や足音の代わりに正弦波振 動を提示する場合では変化が生じなかった。さらに歩行 感に関する主観評価では,歩行音(足音)刺激のときの 評定値が他よりも高かった。つまり,着座状態で歩行感 覚を生み出すような振動刺激が足底へ与えられたとき, 身体前方に身体近傍空間が拡張することが示された(雨 宮・池井・広田・北崎,2016)。この結果は主観指標だ けでなく客観指標によっても擬似的な歩行感覚の潜在的 な側面を理解できる可能性を示すもので,質の高いVR システムを開発するための多感覚刺激の設計方法にも活 用できると期待される。 お わ り に 本稿では触覚と身体感覚における錯覚現象を用いて, 感覚運動情報を提示する手法について概観した。触覚は 確信度の高い情報提示手段として優れ,身体感覚は臨場 感や没入感の醸成に重要な役割を果たすと考えられる。 錯覚現象の生起要因は一括りにできないため,錯覚現象 を情報提示手段として活用する汎用的なモデルを提案す ることは困難である。しかしながら,情報技術の技術革 新が急速であるのに対して,人間の感覚知覚特性や身体 運動特性はほとんど変化しない。そのため,錯覚を工学 的に再現し,活用できる状態にすれば,長きに渡って情 報提示技術の設計に役立つだろう。また,錯覚はそれ自 体が面白さや驚きを持ち,単体でもコンテンツになりえ る。しかし,それを単に一発芸として消費しまわないた めにも活用方法の体系化と適応可能領域の選別が必要と なるだろう。 錯覚現象の多くは意識に上ることなく生じると冒頭で 述べたが,現状では技術や効果を説明する都合上,その 特異性が前面に押し出されていることが多い。しかし, 気づかれないうちに日常生活のどこかで多くの錯覚が情 報提示に利用されている状況こそが最終目標である。そ のためにも,さらなる錯覚を活用した情報提示技術の開 発とともに,そうした提示技術の普及・浸透によって触 覚・体性感覚の理解が進むことが必要である。 引用文献 雨宮智浩 (2012).知覚の非線形性を利用した牽引感提 示 日本ロボット学会誌,30, 483–485.
Amemiya, T. (2015). Perceptual illusions for multisensory dis-plays. Proceedings of the 22nd International Display Work-shops (IDW 15), 1276–1279. 雨宮智浩 (2016).視触覚への過渡振動重畳による擬似 衝突感の生成 日本バーチャルリアリティ学会論文 誌,21, 381–384. 雨宮智浩 (2017).錯覚を利用した情報提示デバイス Clinical Neuroscience, 35, 192–193. 雨宮智浩・安藤英由樹・前田太郎 (2004).偏加速度周 期運動による把持型方向誘導デバイスの開発 日本 バーチャルリアリティ学会第 9回大会論文集,215– 218.
Amemiya, T., Ando, H., & Maeda, T. (2008). Lead-me inter-face for a pulling sensation from hand-held devices. ACM Transactions on Applied Perception, 5, 1–17.
Amemiya, T., & Gomi, H. (2014). Distinct pseudo-attraction force sensation by a thumb-sized vibrator that oscillates asymmetrically. Proceedings of Eurohaptics, 2, 88–95. Amemiya, T., & Gomi, H. (2016). Active manual movement
improves directional perception of illusory force. IEEE Transactions on Haptics, 9, 465–473.
雨宮智浩・広田光一・池井 寧 (2016).着座型揺動装 置のピッチ回転による擬似的な起伏形状知覚 日本 バーチャルリアリティ学会論文誌,21, 359–362. Amemiya, T., Hirota, K., & Ikei, Y. (2016). Tactile apparent
motion on the torso modulates perceived forward self-motion velocity. IEEE Transactions on Haptics, 9, 474–482. 雨宮智浩・池井 寧・広田光一・北崎充晃 (2016).歩
行を模擬した足底振動刺激による身体近傍空間の拡張 日本バーチャルリアリティ学会論文誌,21, 627–633. Amemiya, T., & Maeda, T. (2008). Asymmetric oscillation
dis-torts the perceived heaviness of handheld objects. IEEE Transactions on Haptics, 1, 9–18.
Amemiya, T., & Maeda, T. (2009). Directional Force Sensation by Asymmetric Oscillation from a Double-layer Slider-crank Mechanism, Transactions of the ASME Journal of Computing and Information Science in Engineering, 9, 011001.
Amemiya, T., & Sugiyama, H. (2010). Orienting kinesthetical-ly: A haptic handheld wayfinder for people with visual im-pairments. ACM Transactions on Accessible Computing, 3, 1–23.
Canzoneri, E., Magosso, E., & Serino, A. (2012). Dynamic sounds capture the boundaries of peripersonal space repre-sentation in humans. PLoS ONE, 7, e44306.
Chapman, C. E., Bushnell, M., Miron, D., Duncan, G., & Lund, J. (1987). Sensory perception during movement in man. Experimental Brain Research, 68, 516–524.
Hayward, V. (2008). A brief taxonomy of tactile illusions and demonstrations that can be done in a hardware store. Brain Research Bulletin, 75, 742–752.
Ikei, Y., Abe, K., Hirota, K., & Amemiya, T. (2012). A multi-sensory VR system exploring the ultra-reality. Proceedings. of 18th International Conference on Virtual Systems and Multimedia, 71–78.
Ikei, Y., Shimabukuro, S., Kato, S., Okuya, Y., Abe, K., Hirota, K., & Amemiya, T. (2014). Rendering of virtual walking sensation by a passive body motion. Proceedings of Eurohap-tics, 1, 150–157.
Iwata, H., Yano, H., & Nakaizumi, F. (2001). Gait master: A versatile locomotion interface for uneven virtual terrain. Proceedings of IEEE Virtual Reality Conference, 131–137. Iwata, H., Yano, H., Fukushima, H., & Noma, H. (2005).
Cir-culaFloor. IEEE Computer Graphics and Applications, 25, 64–67.
Johansson, R. S. (1978). Tactile sensibility in the human hand: receptive field characteristics of mechanoreceptive units in the glabrous skin area. The Journal of Physiology, 281, 101– 125.
Kappers, A. M. L., & Bergmann Tiest, W. M. (2013). Illusory rotation in the haptic perception of a moving bar. Experi-mental Brain Research, 231, 325–329.
今 悠気・中村拓人・梶本裕之 (2016).ハンガー反射 の歩行への影響 日本バーチャルリアリティ学会論文
誌,21, 565–573.
Kuchenbecker, K. J., Fiene, J., & Niemeyer, G. (2006). Improv-ing contact realism through event-based haptic feedback. IEEE Transactions on Visualization and Computer Graphics, 12, 219–230.
Lécuyer, A. (2009). Simulating haptic feedback using vision: A survey of research and applications of pseudo-haptic feed-back. Presence: Teleoperators and Virtual Environments, 18, 39–53.
Macefield, V. G., Hager-Ross, C., & Johansson, R. S. (1996). Control of grip force during restraint of an object held be-tween finger and thumb: Responses of cutaneous afferents from the digits. Experimental Brain Research, 108, 155–171. Matsumoto, K., Ban, Y., Narumi, T., Yanase, Y., Tanikawa T., &
Hirose, M. (2016). Unlimited corridor: Redirected walking techniques using visuo-haptic interaction. Proceedings of ACM SIGGRAPH 2016 Emerging Technologies, 20.
Maeda, T., Ando, H., Amemiya, T., Nagaya, N., Sugimoto, M., & Inami, M. (2005). Shaking the world: Galvanic vestibular stimulation as a novel sensation interface. Proceedings of ACM SIGGRAPH 2005 Emerging Technologies, 17.
Noel, J. P., Grivaz, P., Marmaroli, P., Lissek, H., Blanke, O., & Serino, A. (2015). Full body action remapping of periper-sonal space: The case of walking. Neuropsychologia, 70, 375–384.
Suma, E. A., Clark, S., Krum, D., Finkelstein, S., Bolas, M., & Warte, Z. (2011). Leveraging change blindness for redirec-tion in virtual environments. Proceedings of IEEE Virtual Reality Conference, 159–166.