「マルチメディア通信と分散処理ワークショップj 平成20年12月
地磁気および加速度センサによるスキージャンプ選手の
動作モニターシステムの提案
及川正基佐藤永欣村田嘉利
岩手県立大学ソフトウェア情報学部
これまでに地磁気センサと加速度センサを組み合わせて製造工場における工員のルーティング作業モニタを行って きた。直線的動作のモニタには不向きだが、回転運動を主とする動作に関しては高い精度でモニタ可能であることを確 認している。作業モニタ技術の適用先の1っとしてスポーツが考えられるoサッカーのように動き回るスポーツについて は不向きであるが、野球のヒ。ッチングやゴルフのスイングなど常に安定したフォームを要求されるスポーツには適してい ると考えられる。今回はそのーコといえるスキージャンプ競技に関して、選手の動作モニタへの地磁気・力防車度センサの 適用可能性を検討しむ模型を用いた選手の滑降速度の測定、踏み切り{ 立置の測定を行った結果、適用可能性が十分 に高いことが分かった。APropωal of Ski Jumper's Motion Monitor System
by
Terrestrial M a g netism and
Acceleration Sensors
Masaki
Oika
w aNobuyoshi Sato Yo
血ω
i
必i M m a
包Faculty ofSo
伽 置e and
Information Scien
,
e
c
Iw
蹴P r e
fectural U
凶ve
凶ty
sensa四andacce1er甜on悶 悶 隠atan
a血mobilefactOlY. I n 由包戸田信s
,
w e found 0'ほ由a
加restria1m噂letism sensors are 1脱 却 制 伽linearmotion
s
,
bl帥 電yare V町 usef u 1 旬m o凶旬r m凶:on movemen包.Spo市 町 血ought笛 one of柳 lication area of 0'町worlrer's motion moni旬r包制中岱. A l 血oゆ 駒 市of柑 .ch players move山 田 町 句where at p1ayground such笛 S
∞
cer are not su幽 Ile伽 0町白血勾.JeS,however
,
our臨h 勾 邸 就mtobe.su紬 le伽 抑 包ofwhich players are req凶 吋 翻blefonns such出p紬 ingonbaSeI沼止swingof fo
rms,
and discus田dめoutpossib逝ty b 柳 ly旬 間 凶alm噂let1sm ser路 側 釦d節 回leration sen釦 路 句m o凶旬rmotion of ajwnper. As a res叫tofe司 朗m叫 凶 泊g aski jmnp. 1.
まえがき
これまでに地磁気センサと加速度センサを組み合わせ て製造工場における工員のルーティン作業をモニタする 研究を行ってきた[1][2][3][41 その結果、直線的動{ 乍をそ ニタするには不向きだが、回転運動を主とする動作に関 しては高い精度でモニタ可能であることが分カミった。なお、 本論文では、地磁気センサと加速度センサを組み合わせ たものを地磁気・加速度センサと呼ぶ。地磁気・加速度セ ンサを用いた作業モニタ技術の適用先の1っとしてスポ ーツが考えられる。工員のモニタでは固定された作業場 における地球磁場に対する地磁気センサの方向の変化 を利用していることから、野球のピッチングやスキーのよう に場所が固定的で常に安定したフォームが要求されるス ポーツには適していると考えられる。一方、サッカーのよ うに選手の動きが一定でなかったり、選手がフィールド全 体を動き回るようなスポーツについては不向きと考えられ る。 従来、スポーツ選手の動作をモニタする方法としては、 ビデオカメラを利用する方法が一般的である。ユニフォー ムのいろいろな点にマーカをつけ、画像先日里により各マ ーカの移動量を求めた上で各種データを求めていた問。 ルタイムなモニタが難しい点や、選手を撮影するために 複数のカメラが必要であり、それらは固定されていなけれ ばならない、等の制約がある。それに対して、地磁気・加 速度センサを用いた場合、各回の選手の動きの違いをリ アルタイムで表示可能であり、センサを選手や道具に付 けられれば測定可能であることカ= ら測定上の制約も少な い。また、マーカを用いない方法[6]では、要求される精 度が偽れない。 今回は、場所が固定されている安定なフォームが要求 されるスポーツの一つであるスキージャンプ競技に関し て、選手の動作モニタへの地磁気・加速度センサの適用 可能性を検討した。具体的には、模型のジャンプ台を使 い、その上に地磁気・加速度センサを搭載した車両を滑 走させることによりデータを測定した。アプローチフォー ムやスキーのワックスの違いによって生じるとされるアプ ローチスピードに関しては、地鱗気・加速度センサの上に 大きさの異なる帆を取り付け、それによる空気抵抗による スピードの違いを地磁気の変化スピードの違いとして検 出できるかを実験した。その結果、帆の大きさに反比例し て地磁気の変化するスピードが低下していることを確認し た。また、スキージャンプにおいて飛距離を左右する要飛び出し時の踏み切りによる加速度の変化を測定する方 法が考えられるが、ここでは地磁気・加速度センサを搭載 した車両をクッションに衝突させた時の加速度の変イ
k
坊主ら 飛び出し位置の違いを検出することとした。その結果、停 止位置の違いに応じて加速度の変化するタイミングがず れることを確認した。 次章では、スキージャンプ競技に要求されると想定さ れる測定項目を列記する。続いて3章では、動作トレース を中心に関連研究について紹介する。 4 章では、地磁気・ カ国産度センサを用いて先の測定項目を測定できるか否か をジャンプ台の模型等を用いた実験と測定結果を報告す る。2. スキージャンプのモニタに要求される項目
スキージャンプは、基本的に飛距離を競う競技である が、得点は、飛距離、飛型、着地姿勢の3つの要素からな る。このうち、飛距離で高得点を得るためには、アプロー チスピードと飛型、踏み切り位置とその方向、力が重要で ある。スキージャンプの 1回の滑空出l
下のような段階を 取り、それぞれ成績に関連する要素を持つ。 ( 1 ) . アプローチ: 踏み切り直前の速度が高いほど、飛距 離も伸びる。速度の違いは、滑走を開始する位置、 フォームやスキーワックスに起因する。滑走を開始す る位置は競技役員によって決定されるため、選手は 空気抵抗、スキー板と雪面の摩擦舷抗を小さくするこ とにより速度を上げることになる。 (2). 踏み切り: 踏み切りタイミング( 踏み切り位置) と方向 および力( 加速度) 。踏み切りによって、飛距離が大 きく左右される。 。) . 空中姿勢: 飛型の適正化とそれに持っていくまでの 時間。飛型を適正化し、空気抵抗を小さくするととも に、選手の前方からの空気の流れを利用して揚力を 得るため、空中姿勢は飛蹴陛左右する。飛型が適 正化されたあとは静止しているのがベストとされる。 また、飛行中の風向きなども飛距離を大きく左右す る。 (4). 着地: テレマーク姿勢。着地の姿勢が美しいがどうか も採点の基準となる。 スキージャンプのモニタに要求される項目も各段階に おける成績を左右する要素によって異なる。 (1). アプローチ: アプローチ開始カhら踏み切りまでの連側快速度 の変化 練習における各国の速度変化の違い (2).踏み切り: 踏み切りタイミング 踏み切りの方向 踏み切り力 。) . 鮒T
中: スキーの地面に対する傾き、スキーに対する下半 身および上半身の傾き 適正と恩オつれるフォームに持っていくまでの時間 (4). 着地: テレマーク姿勢の確立 今回、これゐの項目を地磁気・加速度センサを利用して 測定する手法を確立するに当たり、台車に地磁気・加速 度センサを取り付けて実験を行った。よって、当然ながら テレマーク姿勢をとることはでボきない。また、飛行中のフオ ーム変化に関しても模型を利用した測定が困難であるこ とから、本論文の対象外とする。3.
関連研究
人の動怜モニタすると言っても、人の移動に伴う位置 の推定と手足や身体の動きの変化の推定に分カ亙れる。位 置の推定に当たっては G P S を利用する方式、実説躯. A N を利用する方式 RFID を利用する方式などがある。 G P S の適用エリアが主に屋外に限られる上に、その精度は方 式によって異なるが数m
以下l
こすることは困難である。ス キージャンプに適用するには精度不足といえる。無線 L A N を利用した位置の研究は教室のようなところを中心 に研究されており 5伽 1程度の精度で推定可能との研究 報告もある[η[8]0スキーのジャンプ台に関しては、周囲 に障害物が少ないことから、無線L A Nの基地局を適切に 配置すれば、数十m
の精度で位置を測定てをる可能性 はある。 RFID の利用に関しては、メッシュ状に R F タグを 床等に埋め込んで位置を測定する研究が行われている [9]0 人の動作を推定する方式としては、加速度センサを利 用した方法、カ同車度センサと地磁気センサやジャイロセン サを組み合わせた方法、ビデオカメラを利用した方法な どがある白梅本らは加速度センサを利用し、同一動怜繰 り返し; 新可鵬首測定している[1句。我々は、加速度セン サで防車樹句に動f
怜モニタすることが困難で泌ことか ら、地磁気センサから回転運動量を抽出すると共に加速 度センサの出力と組み合わせて、自動車工場における工 員の作業をモニタする研究を行ってきた[1][2][3][4]。その 結果、ルーティン作業における動作は毎回ほぽ同じであ り、適切な特徴値を利用することにより通常と異なった動 作を行った事をリアルタイムで検出可能であることを確認 している。しかし、動作における動作速度の違いやタイミ ングの違いについての考察は行っていない。 谷口らは、複数のビデオカメラを用いて人の動きをリア ルタイムにキャプチャする研究を行っている[11]0身体の 上にカラーマーカを付けた上で複数のビデオカメラが必 要であり、画像処湿のために多大な処理能力を有するコ ンピュータが必要となっている。 ビデオカメラを利用したモーショントレースはスポーツ にも適用されている。J.MBadmaらは、8台の高速カメラを 利用して野球のピッチャーのフォームがフラットなグランド とヒ。ッチングマウンドで異なることを確認している[ 12]。4.
実験
ここで、実験方法とその結果について述べる。前節で 述べたスキージャンプの選手の挙動を地磁気・加速度セ ンサを用いて測定するにあたり、地獄気・加速度センサに図 l 台耳Eと地磁気・加速度センサ よる測定の再現性を検証する必要がある。実際のスキー ジャンプ台と選手により再現性の検証を行うことも考えら れるが、実験の規棋が大きくなる上に、選手が
f
耳固まった くl
百lじ動きをできるとは│ 浪らない。よって、本論文では、ス キージャンプ台と選手を模した環境を机上で再現し、地 磁気・加速度センサによる測定の再現性の検蔽をする。 次に、実験凍境を述べる。スキージャンプ台はプラレ ーノレの直線レーノレ、坂レーノレを用いて再現した。選手の 代わりに、プラレーノレの車両から上部を取り去り、シャー ンと車輪だけの台車とし、その上部に地磁気・加速度セン サを貼り付けた。その写真を図lに示す。台:ilIはスキージ ヤシゲ台の艇型の上部より昨出し、台車が滑走してし、る問 の地鱗気・加速度センサの出力を測定する。本論文では 再現性の石lE
i ' 2 ,n > 必要であるため、台車が滑走を開始する 位12
には、耳目輸を浮かせることにより台車の滑走を停止さ せることができるレーノレ( 以下スタートレーノレとl呼ぶ) を用 いた。スタート時にはレバーの操作により車輪の浮き上が りを止め、滑走を開始させる。 地』磁気・加速度センサは、アイチ ・マイクロインテリジェ ント製の A M J-{jO l C Gを利用した。 25m5 毎に測定された 結果はcsv
ファイノレとして出力される。4.1
地磁気・加速度センサによる再現性の検証 地磁気・加速度セY サによる、地磁気の変化と加i i l i J s ' の 測定により、スキージャンプ選手の挙動を測定できること を検証するため、ジャンプ台の模型をプラレーノレを用い て作った。その模型を図 2 に汗汁。 ジャンプ台の椛成は、 上から、スタートレーノレ l本、 坂レーノレ 3 本であり、 この他 にレーノレを支える橋脚lからなっている。スタートレーノレは レバー繰作によりレーノレ中央にある台状の部分を上下さ せ、I同論をi
牢カ通せることで台車を停止させる。本来、直線 レーノレとスプーン形状のレーノレの組み合わせにより、ス プーンの曲線部分における地織気ベタトノレの変化をとら えるべきであるが、そのようなレーノレがないため、図 2 の ように直線レーノレと坂レーノレの組み合わせに 3 段抗日立と しT
らこれにより、l納税部分の地磁気のベクトノレの変化を 検出することにしT
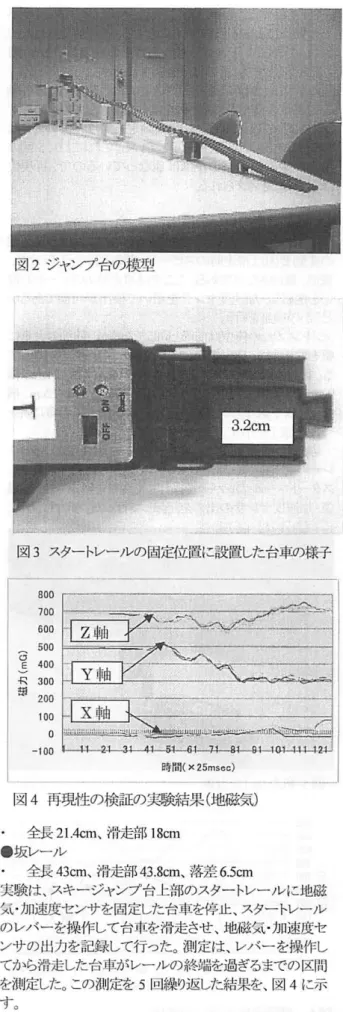
こ。仇成部品の詳細を以下に記す。 . スタートレーノレ 図 2 ジヤンケP台の模型 図 3 スタートレーノレの固定位位に設置した台車の様子科医正予三
¥
4
4
一100 時間(X25mscc) 図 4 再現性の検証の実験結巣( 地磁気) 全長 21.4cm、司、五三五fll 18cm ・坂レーノレ 全長 43c m、治走部 43.8cm、落差 6.5c m 実験は、スキージャンプ台上部のスタートレーノレに地磁 気 ・加速度センサを悶定した台車を停止、スクートレーノレ のレバーを操作して台車を滑走させ、地磁気・加速度セ ンサのli¥力を記録して行った。測定は、レバーを燥作し てから滑走した台車がレーノレの終端を過ぎるまでの区間 を測定しT
らこの測定を 5 巨隙り返した結果を、図 4 に示 す。 なお、この実験を含めたこれ以降すべての台車をスタ一卜する操作は、台車は常に一定叫立
i
町、らスタートレバ ーの操作により発進させるものとする。その固定された位 置は、スタートレーノレの上端から台車の後端が 3.2cm 阿佐 れたところとする。その様子を図 3 に示す。 の地』磁気の変化を、l時間軸を同じ間隔にしてひとつのグ ラフにプロッ トしている。5 回の測定結果は多少のズレは あるもののほぼ同じ波町役示している。これにより、 5 回の 滑走の地磁気の波形がほぼ重なっているので、再現性 は十分あると考えられる。 4.2 滑臨塞度の遣いの検出 以前にも述べたようにスキージャンプにおける飛距離 の変動要因は滑走11寺のスピード、踏み切りのタイミング、 飛形、風向きなどである。ここでは滑走11寺のスピードの違 いを地磁気・加速度センサを朋し、て検出が可能であるか どうかの検証を行う。 ジャシゲ台の模型は前節と同じであるが、前首iの台車に 帆を取り付け、空気抵抗により台車の滑お車度を制節す る。帆はダンボールにより、而 積 216cm '(縦 240m、被 9c m) ( 以下帆大) とこの半分の面積 108cm '(縦 l2cm 、横 9cm) ( 以下糾j、)の2 種類を作成した。図 5 に台車に帆を つけた傑子を示す。 実験は、前節と同じく、スキージャンプ台上部のスタート レーノレに地磁気・加速度センサを闘定した台車を停止、 スタートレーノレのレバーを操 作して台車を滑走させ、 地磁 気・加速度センサの出力を託滋して行った。帆なし、帆大、 図5 帆をつけた台車 500 450 400 350 τ2 5 0 語2凹 150 100 50 o三きご一一ー一一一一
10 19 28 37 46 55 64 73 82 9 1 100109 118 時間 ( x25m日, ) 図6 滑降速度の違いの検出 表1 台車の滑走区間の時冊 l 台車の状態 │ 滑走区間における平均時間( 秒)W
よしI
2.131
l
刷、I
2.15 帆大I
2.20 Y 軸方向に対する 5 回の地磁気ぞノサの出力を平均した 結果を図 6 に示す。 図 6 をみると、yil4b
の姐減 気 の 劉ヒが、 帆jよし、 制 ¥ 帆大の順に時間軸方向に間延びしていくことが読み取れ る。これは、 机なし、4
ル
1¥
帆大の順に台車の滑起型支が 遅くなっていることを意味する。おおむね帆の面1 fH
こ比 例する滑走1時間である。ただし、各軸の波形は、1時間制l 方向の長さを然視したとしても、初防2一致していなし 、。 これは、台車の大きさに比べて大きな帆を位3
有したため、 空気抵抗や帆を台車に取り付けたときの左布のバランス などにより、台車の挙WJ
が変わったためと考えられる。こ れらの実験結果から、スキージャンプにおける滑降速度 の泣いの検出は十分可能である。 また今回、滑走区間( 全長 148.8cm)において、台車が 滑走を開始してから終端に途するまでの11寺聞をストyプウ ォッチを用いて31
1)定した。帆なし、世レj ¥帆大のそれぞれ について、スタートレーノレのレバーを操作した動作と同時 にストノプウォッチをスター卜させて測定した。それぞれ 5 回ずつ測定した結果の平均を表1 に示す。地磁気・加速 度センサのデータを利用して、滑走区間を通過する時間 を求めることがでできる。その結巣λ帆1...
し、申問ノj ¥帆大の順 に2. 13 秒、2. 15 秒、2.20秒となり、ストップウ" " ' " チで計測 した結果と一致する。ただし、有効数字以下の桁数に若 干の誤差が見られた。地磁気 ・加速度センサのデータか ら台耳切〉滑走11寺m
を求めることは 卜分に可能である。 43 踏み切り告イミングの違いの検出 本釘iでは、スキージャンプにおける飛E
巨南北のゑ苛h
要因 のひとつである、踏切タイミングの泣いの検出を検節する。 ここでジャンプ台の模型は、前節まで似i周したものとは異 なる形を用いた。これは、前節までロコジャンプ台模型はス タートイ立低から終端までの長さが大きすぎることや、実験 の設置昌蹟上傾斜での踏み切りのタイミングが測定しにく く正IiM...
データが取りにくいためである。よって図7 のよう に、γ /プノレに踏み切りのタイミングを計れるように、坂レ ールl本の後に直線レーノレl本設置して踏み切均のタイ ミングはクッションの位置で調挫する。 今回その設置{立位は坂レーノレの下端から7cm、2 1cm、 35cm とする。これ』訂it
初の7cm を固定とし、そこから矧瑚 隔でクッ、ンョンをずらした場合の、台車が止まるタイミング の泣し、を測定するためである。 クァンョン以外にも例えば本や雑誌などでも台車を停 止させることができるように思われるが、これらは固いた め、台車がぶつかったときの跳ね返りがクグンョンに比べ 大きく、宿線した衝躍で脱線し停止のタイミングが分から ない。よって、跳ね返りの衝撃による脱線を避けるため本•
噌 J 一 一w ・ . 崎 図7 踏み切りタイミング測定用のジャンプ台と踏み切り 位iE
を換したクッション'"
" 0 3 0 0 1-一 一
官 と 説 副 百 h R A c c l Y_ 7cmー
'"
- 2 0 0 時 間( x25msec) 図8 それぞれの踏み切りタイミングの違いの検出 や雑誌に比べて柔らかいクッションを用いることにした。 台車は、机を取り付けてのスピード捌峰は必要ないの で、6.1節の犯験でも使用した図lの台耳Eと同じとした。 この実験においては、踏み切りのタイミングを測定する 上で一審関係する y i14h方向( すなわち進行方向) の加 速 度の変化 を検証する。この実験は先のクッションに台車が 衝突したタイミングがスキージャンノξーの踏み切りのタイ ミングの変化 に相当すると考えているため、台11!の進行 方向の加速度が重要と考えられるからである。 実験は、図7のレーノレ上部に取り付けたスタートレーノレ にll!l
i鋭気・)JII速度センサを固定した台I 1 Iを停止、スタート レーノレのレパーを操作して台IILを滑走させ、加速度セン サの出力を記録して行った。踏み切りタイミングの帽を、 妓レーノレの下端から7c,m 2 1 c m,3 5 c mと変化させそれそeれ 5回繰り返は1']定し、それぞれ5 回の加速度センサのY 軸の平均を求める。この結果を図8に示す。 関B をみると、7 c m、2 1 c m、3 5 c mそれぞれの加速度の 段初の大きなピーク( 図8で矢印をつけた箇所日がほぼ等 間隔ずつずれていることが読みl肘Lる。これは台車がそ れそ' れの踏み切り位置( クッションの位l
(1)に対して、どこ で衝突したかの違いが、y 11411方向の加速度のヒ・ークのタ イミングの逃いとしてとして現れていることを意味する。ま たそれそ' れの加i
志度が大きくi
主っている。台車はクツ‘ンョ 図9 直線j!ffi副Jの速度を検出するための模型 1200 1000 _ 8∞
一
一
一
一
o E - 600 . . ミ 盟 4凶 200¥
11
¥ ¥ /、
、
¥ ¥ - < J ,。
1 25 49 7J 91 121145 169 193211 W 265289313331361 :国4側 時r.
,(x 25間 切} │羽IO 磁石による直線運illI
w)
速度dl ']定(43cl11間隔) 1200 l凶日 ( 加。'"
5 E30 4ミ 差別400 200 0 1 21 臼 刊 1051311511凶20923526 1281313339365391m 443 時l
r
引x25m日巴) 図 11 磁石による直線j ! f f iIVjO)速度nll]定(10.75cm間隔) ンに衝突後、跳ね返されて脱線するが、脱線のしかたは 侮回同じではなく、脱線するときに検伝したりしなかったり するため、衝突の│際の加速度の大きさの泣いとして現れ ると考えられる。この実験では踏み切り位置の速いを)JII速 度のピークの伎町、すなわちタイミングの違いとして、地 磁 気・加 速度センサで測定することが可能であるかを検 証寸ることが目的であり、 加 速 度の大きさは問題ではな し、 4.4 直縦室勤の時の速度の検出 本節では、直線運動において、スキージャンプにおけ る飛出羽世の変動要因のひとつである速度をi切滋気 ・加速度センサを用いて測定できるかどうか検証する。スキージ ャンプのジャンプ台にも直線が含まれているo 直線運動 の場合、方角の変化がないため台車の運動が地磁気の 変化として検出できない。この問題を避けるため、磁石を 等間隔にレーノレに貼り付け、台車が通過するときの地磁 気のグラフの変化を利用し、速度を測定できるかどうかを 確認する。すなわち、磁石の直上を通過したときの地磁 気のグラフの変化の時間間隔により速度を求める。その 様子を図9に示す。 今回はジャンプ台の代わりに全て直線レールだけで構 成され
.f
d誌債で、モーターっきの車両で地磁気・加速度 センサを取り付けた車両を牽引し実験を行う。磁石は 43佃間隔で4個貼り付けた。また、モーターによる地磁気 センサへの影響を減らすため、牽引車と地磁気・加速度 センサを取り付けた台車の聞に1両挟んだ。台車を一定 の速度で通過させるため、スター州立置から 62.5cm の加 速のための区間を取った。5 回繰り返し測定した結果、得 られ矧蛾気の波形を図 10 に示す。 図 10 では地磁気・加速度センサが峨石の真上を通過 したときに合わせて、縦線を引いた。これらの間隔は 1.175 秒で、台車が走る速さは 3釦凶と求めることができ る。よって、直線運動での地磁気の波形を利用して速度 を検出させることが可能であることが分かる。また、図 11 に、磁石の間隔を図 10 の 114 にしたときの地磁気の波形 を示す。これらの図を見ても分かるように、磁石の間隔を IOcm
以下にしても磁石に近づいたことによるピークの検 出は可能である。7.
まとめと今後の課題
本論文では、地磁気・力防車度センサのスポーツへの応 用として、スキージャンプを題材に実験を行った。スキー ジャンプのような競妓はジャンプ台が固定されており、選 手のフォームが毎回ほぽ固定されている上に、サッカー のように動き回らないので、地磁気センサによるモニタに 向いている。今回、スキージャンプの選手に地磁気・加速 度センサを取り付けて実験を行う前に、地磁気・加速度セ ンサを利用したタイミング、速度などの測定が可能かどう かを模型により実験し、可能であるとの結果を得丸今後 の課題として、センサを選手に取り付けてジャンプしても らい実際に有効に測定できるかどうかの検証や、選手の 細かい動きと地磁気・加速度センサの波形の対応をとる ためのカメラとの連携などが考えられる。また今回まスキ ージャンプにおける飛距離の変動要因のひとつである空 中姿勢に関しての検証は行っていない。空中での測定が 可能であるかどうかの検証をするにあたり、スキージャン プ選手を模した模型に地磁気・加速度センサを貼り付け ての空中での挙動の測定を考えている。 白白,Y c 油加血i M m泊,‘' Q u a l i t y 白血01 for I n d t 蹴凶日叫1出 b y W o水質3・
Motion 百le 2nd In加nati.onal Wmkshop onNetw団組問島 AppU剖 ons and (TeNAS2∞8,) in
∞
rYlDl
ction w池 百 隠IEEE[2] [3] [4] [ 勾 22nd I n 岡ational C
∞
b 四 回 on A dvancedInfurmati∞Net附 踊 略andA即日制ons(AIN
A2∞
8,)ppl480-1485. (却O
め
佐蔚泳欣、小田島昌一、鈴木潤、石川泰二、村田嘉 利、『地磁気・加速度センサを利用した作業トレース システムのプロトタイプA
第 135 回マルチメディア 通信と分散処理研究会,情報処理学会研究報告, Vol21∞
8, N o.54, pp.153-158 (2008.の
Nobuyo也i白白" J m
suza
必,Taiji油k
即
a,
Yo品加由i M m a飽,‘'Prototype of a Workers' Motion百 沼 田 勾 取m using ' D 回繍凶M 噂et:ism and Acceler説on Sensors",
The 2nd In個nationaI ωnferen回 on NetwoIk":勘sedInfurmati佃旬蜘s,(NBiS2
∞
1 8),
ωb e叩 伊 国 叫Y o品加也 M m a阻, Nobuyo:也i お 加 , 明 叫lction
Managemer並 匂 蹴m in an Assembly P1a皿 b y
Ten醜 恒1 地 gnetism Sensors", Fifih In回national
co
ぱ 自 明 白 on Netwo:北ed Sensing 匂S蜘 盟。
NSS2∞
8,)pp27-30. (2∞
8)S.Yc∞emo旬I,A.M錨u m副to, D. Ari包,R.Tan取IChi,“A
R飽l-time Motion
C a mera Fusion"
,
Proc. of on Image Ana砂sis and町 四 国。
d唱
αA P ) . pp.6OQ(6)5.(1999) [
句 M . M
cap
細 胞 組d Dis位ibutedVJdeo A n 可sfor Jn包IIigent S伊ces",
IEEE Transactions of 匂蜘ns, Man, and匂bemetics - part A : 匂S回 sand Humans, Vol35
,
[
η
[ 町 [9] N o,1. pp.145-163.∞
。
15)R 助hI, v.N. pa伽 m油b
an,
‘
浪
A DER: A n Jn-B凶 也 港 町七笛edU : 町L o 剖on and 1 i 国組噌匂s闘" ,Proc.ofIE匝 酎F O
∞
1M 21側,pp.77S-7斜. ( 辺削)T.KIta釦ka,T. N 血nishi,A. Fl畑da,“Wrrell鰯 L A N
B錨ed Indoor PI儲 樋:oning 勾stem WiPS and 118
S泊叫ation"
,
proc.
of 2003 IEEE pac祖:c Rim Conferen田 on 白mmtmi剖.ons, 白血中蜘' S , and Signal 小倉正利、峰野博史、寺島美昭、徳永雄一、水野 忠則: RFID を利用した物品管理システムの精度向 上手法に関する研究情報処週学会マルチメディ ア,分鼠協調とモパイル( 01∞
M0200ηシンポジウ ム論文集pp.1 793-1 7卯(2∞
7.η [1句梅本功太、西垣正勝: 人間の動作を用いた認証方 式に関する検討,情報処理学会マルチメディア,分 散,協調とそパイル( DI C O M ω∞
ηシンポジウム論 文 集pp.1338-134の∞
'7.η.[11] Yonemoto, S. 陥1 s u mo句',A. Ari箇,D. 11血iguchi, R.-I,‘'A real-time
個 nera fusion"
,
in Proc. ofJn卸nationalConferen∞
onImage
Analys
is and 日明白血忌 1999. pp.6∞-605.(199
の
[I勾工M B袖lleI,W . G . R泊sch,M P. Barber,G. F. Harris,
“
AKinemati
c and Kinetic Biom民hani伺1 Model forBa毘凶II Pitching and its Use I n 也e E粗mination and
Com parison of FIat-Ground血d Mound pi凶itぜ: