Fictitious Domain 法による着水衝撃の数値解析
Numerical analysis of water-impact phenomena by the fictitious domain method
精密工学専攻
3
号 新谷 豪章Hideaki Araya
1.
はじめに着水衝撃とは物体が速度を持って水面に衝突するときに生じ る現象であり,船舶のスラミング,飛行艇の着水,宇宙船の海 上着水など例を見ることができる.荒海上を船舶が航行すると き,船首が波によって持ち上げられたのち海面にたたきつけら れることがある.これがスラミング
(slamming)
である.この ため船体外板などに局所的なダメージを被ったり,時には衝撃 圧が船首部甲板を座屈させるほどの大きさとなり海難事故を引 き起こすことさえある.このように衝撃圧を知るということは 船舶の安全性を確保するうえで必要である.このような物体の 着水現象をモデル化すると,固体と自由表面を有する液体の連 成問題になる.このような問題においては,液体領域を計算メッ シュで覆い,固体の運動や自由表面の変形に合わせてメッシュ を変形させたり,作り直しながら液体内の流れ計算を行うこと が多い.ALE
法(Arbitrary Lagrangian-Eulerian method)
に よる解析がその例である(1).しかし,このような方法では液 体領域に張ったメッシュを毎回作り直す作業が必要であり,計 算手順が複雑になるのが難点である.これに対して,液体領域 を含む広い領域に固定したメッシュを張り,その上で固体や自 由表面の位置を補足しながら流れ計算を行う方法がある.固体 と流体の連成問題に対する方法としてFictitious Domain
法,Ghost Fluid
法,Immersed Boundary
法などが提案されてお り,自由表面問題に対する方法として,Level Set
法やVOF
法 などが提案されている.室本(2)は,着水衝撃現象を固体と液体の連成問題としてで はなく,固体や液体の周囲に広がる気体領域も計算領域とする 気液固
3
相の連成問題として解析することを検討した.そして,固相と気液相の連成解析には
Fictitious Domain
法を,気相と 液相の連成解析にはLevel Set
法を用いる計算手法を提案した.さまざまな数値実験を通して,室本の方法は有効であることが 示されたが,実用解法とするのには計算精度の向上を図る必要 があることがわかった.そこで,本研究では,室本の計算方法 の精度を向上させることを目的として行う.
2.
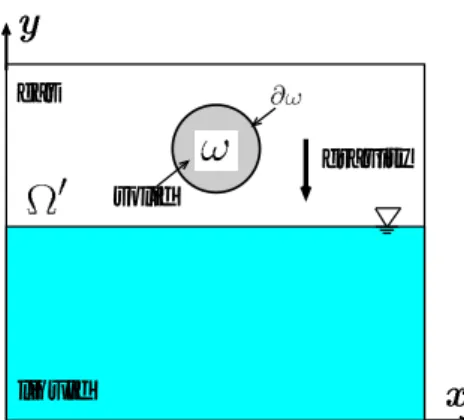
流れの支配方程式Fig.
1のような2
次元のモデルを考える.気相と液相内の流 体は非圧縮性粘性流体とする。このとき流れの支配方程式は次 の非圧縮ナビエ・ストークス方程式と連続の方程式である.∂u
∂t + (u · ∇)u = 1 ρ ∇ · ff + F in Ω
′(1)
∇ · u = 0 in Ω
′(2)
である.ここで,
Ω
′は気相と液相を合わせた流体領域を表す.また
u
は速度,ff
は応力テンソル,ρ
は密度,F
は外力を表す.gravity
liquid gas
solid
Fig. 1: A computational model for the water entry ploblem of a rigid body
外力として重力を考える.流体をニュートン流体として,
ff
を 次のように与える.ff = −pI + µ [
∇u + (∇u
T) ]
(3)
ここで,p
は圧力, µ
は粘性係数を表す.固体表面を∂ω
する.そのとき,固体表面境界
∂ω
上にu = u
bon ∂ω (4)
を課す.ここで
u
bは固体の速度である.Fig.1
の4
辺の壁境 界には滑り条件を課す.3. Fictitious Domain
法Fictitious Domain
法では,流体が占める領域Ω
′を計算領域 とするのではなく,Ω
′に固体が占める領域ω
を加えたΩ(Fig.1
の長方形領域の内部全体)
を計算領域とする.そして,固体境界∂ω
上の境界条件を,境界条件としてではなく,Ω
内のu
に対 する拘束条件として用いる.式(1), (2)
にFicititious Domain
法を適用して弱形式を導くと,次式のようになる.ρ
∫
Ω
[ ∂u
∂t + (u · ∇)u ]
· u
∗dΩ −
∫
Ω
p∇ · u
∗dΩ + µ
∫
Ω
[ ∇u : u
∗+ ∇u : (∇u
∗)
T] dΩ
− ρ
∫
Ω
F · u
∗dΩ =
∫
ω
– · u
∗dω (5)
∫
Ω
p
∗∇ · u dΩ = 0 (6)
∫
ω
–
∗· (u − u
b) dω = 0 (7)
ここで,
–
はラグランジュ未定乗数であり,アスタリスク∗
のついたものは重み関数を表す.式
(7)
は式(4)
から導かれる式(5)
に対する付帯条件である.このように,ナビエストークス方程式の弱形式に
–
の境界積分 項を付加することにより,物体表面境界∂ω
上での境界条件を 拘束条件化する事ができ,物体の存在を意識せずにΩ
全体を 計算領域と考えることができる.そのため,物体の移動に伴う メッシュの再構築の必要がなくなる.また
Fictitius Domain
法ではラグランジュ未定乗数–
をω
に沿って積分することで流体力が簡単に求まるため,
流体構造 練成問題には非常に有用性が高い.4.
弱形式の離散化4.1
空間方向の離散化空間方向の離散化には有限要素法を用いる.有限要素として 三角形要素を用いる.速度は
Fig.2(a)
のように,要素を4つの 小三角形に分割し,各小三角形内でx, y
の1次式で近似する.圧力は
Fig.2(b)
のように全体でx, y
の1
次式で近似する.領域式
ω
を覆う有限要素メッシュとは別に,(5),(7)
のω
内 の積分のためにω
を覆うメッシュを別に用意する.要素は三角 形とし,–,–
˜は要素内でx, y
の1
次式で近似する.以上より,式
(5)-(7)
は離散化され,M dU
dt + [A(U) + D] U − HP − F − BM
ωΛ = 0 (8)
H
TU = 0 (9)
B
TU = U
b(10)
となる.ここで,
M
時間微分項,A(U)
は移流項,D
は拡散項,H
は圧力項,BM
ωは–
の項に対応する係数行列である.M
の上付きバーは対角化を意味する.また,F
は外力項を表す.(a) velocity (b) pressure Fig. 2: Nodes of a Bercovier-Pironneau element
4.2
時間方向の離散化時間方向の離散化には差分法を用いる.時間軸を一定の長さ
∆t
の小区間に分割し,時刻t
n= n∆t
と時刻t
n+1= (n +1)∆t
に挟まれた区間を考える.そこで,式(8)-(10)
を時間に関して 離散化するとともに,次のような3
組の方程式群に分解する.M U
∗− U
n∆t + [
A(U
n) + D ]
U
n− HP
n−F − BM
ωΛ
n= 0 (11)
M U
∗∗− U
n∆t − H (
P
n+1− P
n)
= 0 H
TU
∗∗= 0
(12)
M U
n+1− U
∗∗∆t − BM
ω(Λ
n+1− Λ
n) = 0 B
TU
n+1= U
b(13)
ここに,上付き添字
∗, ∗∗
は中間的な速度を意味する.時刻t
n における物理量に値を知って,時刻t
n+1における値を求める ために,式(11)-(13)
を次のステップで段階的に解いていく.step1:
中間流速U
∗を式(11)
より求める.step2:
式(12)
の第1
式をU
∗∗について解き,その結果を式(12)
の第2
式に代入すると,( H
TM
−1H )
Φ = − H
T∆t U
∗(14)
を得る.ここに,
Φ = P
n+1− P
n(15)
である.式(14)
を解いて圧力修正量Φ
を求め,式(15)
よ りP
n+1を計算する.そして,式(12)
の第1
式によってU
∗∗を求める.step3:
式(13)
の第1
式をU
n+1について解き,その結果を 式(13)
の第2
式に代入すると,∆t(B
TM
−1BM
ω)Ψ = U
n+1b− B
TU
∗∗(16)
を得る.ここに
Ψ = Λ
n+1− Λ
n+1(17)
である.式(16)
を解いてΛ
の修正量Ψ
を求め,式(17)
よりΛ
n+1 を計算する.そして,式(13)
の第1
式によっ てU
n+1を求める.連立
1
次代数方程式(14),(16)
の求解には,共役勾配法を用いる.5.
レベルセット法自由表面の位置を特定するために
,
レベルセット法を用いる.流体領域
Ω
′において関数φ(x, y, t)
を定義する.φ
はφ
{ > 0 (
液相において)
< 0 (
気相において) (18)
とし,|φ|
は自由表面 からの距離を表すとする.このとき,φ = 0
の等値線が自由表面を表すことになる.そこで,各時刻におい てΩ
′内のφ
の分布の中からφ = 0
の曲線を見つければ自由表 面の位置と形状を把握することができる.φ
の時間変化は移流 方程式∂φ
∂t + (u · ∇)φ = 0 (19)
に従う.式
(19)
を解いてφ
を求め続けていくと,計算誤差の影 響によって距離関数を表すという性質が失われてしまう.φ
が 距離関数であるという性質を保つための処理が行われる.再初 期化は∂φ
∂τ + S(φ)(|φ| − 1) = 0 (20)
を解くことで行われる.
τ
は仮想時間である.またS(φ)
はS(φ) = √ φ
φ
2+ (9h)
2(21)
で定義される.流体内の各点での密度と粘性係数は次式で計算 する.
ρ(φ) = (1 − H (φ))ρ
l+ ρ
g· H (φ) (22) µ(φ) = (1 − H(φ))µ
l+ µ
g· H(φ) (23)
ここで,ρ
l, ρ
gはそれぞれ液体,気体での密度,µ
l, µ
g はそれ ぞれ液体,気体の粘性係数である.H(φ)
は次式で定義される 関数である.H(φ) =
1 : φ > α
0 : φ < −α
φ + ϵ 2ϵ
1 2π sin( πφ
α ) : |φ| ≤ α
(24)
ここで,
α
は要素の代表長さをh
としたとき,α = 2h
の大 きさである.式(24)
は自由表面を厚さ4h
の幅をもって帯状の 領域で表すことを意味している.6.
計算手順6.1 3
相計算のアルゴリズム3
相計算のアルゴリズムは以下のとおりである.1.
式(22)
,(23)
,節点ごとに密度,
粘性係数の値を計算する.2.
流れ計算を行い,速度u,
圧力p
ラグランジュ未定乗数–
を求める.3.
移流方程式(19)
を解き,レベルセット関数φ
の新たな分 布を決定する.4.
式(20)
を解いてφ
の再初期化を行う.5.
固体に作用する流体力を計算する.6.
求めた流体力を基にして固体の運動方程式を解き,固体の 速度と変位を求める.7.
固体の変位に合わせて固体領域ω
のメッシュの位置を更 新する.8.
時間を∆t
だけ進めて手順1.
から繰り返す.6.2
流体力の計算Fictitious Domain
法において,ラグランジュ未定乗数–
は– = ff · n (25)
という意味を持つ.ここに
n
は固体表面に立てた外向き単位法 線ベクトルである.そこで,F
λ= −
∫
ω
–dω (26)
によって,固体が流体から受ける力を計算することができる.し かし,
F
λには浮力の効果が反映されないので,浮力は別に計 算しなければならない.そこで,浮力F
bをF
b= −g
∫
ω
ρdω (27)
で計算する.以上より,固体に作用する流体力
F
はF = F
λ+F
bで与えられる.
6.3
固体の運動方程式固体の運動方程式を次式で与える.
M d
2x
dt
2= M g + F (28)
ここに,
x
は物体の重心の座標,M
は物体の質量,g
は重力等 の外力,F
は流体力を表す.式(28)
の解法には4
次のルンゲ・クッタ法を用いる.
7.
メッシュの細分化室本は
Cheng
ら(3)が行った着水実験と比較し,計算精度の検証を行った.そのモデルは
Fig.4
に示す.しかし,時々刻々変 化する物体の位置や物体に加わる圧力を正確に捉えるにはまだ 改良が必要であった.Loon
ら(4)は,物体周辺の有限要素メッ シュを細分化することによって計算精度が向上することを報告 している.しかし,彼らは,細分化の際にコントロールポイント が節点に一致するように物体形状に合わせてメッシュを生成して いた.物体形状に合わせてメッシュを分割するということはラグ ランジュ的解法であるALE(Arbitrary Lagrangian-Eulerian)
法と同じであり,物体の形状や位置とは独立にメッシュを張る ことができるというFictitious Domain
法の長所を損なうもの であると考えられる.よって,時々刻々物体が移動する本問題 に対して有効な手段であるとは言えない.そこで,本研究では 物体近傍のメッシュに対して細分化を施すことにより計算精度 が向上するのではないかと考えた.Fig.3
を用いて細分化の手 順を説明する.細分化前のメッシュはFig.3(a)
のように規則的 に要素が並んだ構造とする.はじめにFig.3(b)
の太枠に囲まれ た領域のように物体が存在する領域より大きく細分化領域をと る.そして,Fig.3(c)
のように細分化領域内の三角形要素を4
分割する.このままでは細分化領域とそうでない領域の2
つの 領域に分かれてしまう.最後にFig.3(d)
に示すように,細分化 領域の境界上にある外側の三角形要素を2
分割する.また,時々 刻々物体の移動に合わせて細分化を行うのではなく,物体があ る一定の距離を移動した場合,そのときの物体の位置に合わせ,Fig.3(a)
の初期のメッシュの状態から改めて細分化を行う.mesh
solid
(a) Original mesh (b) Area of subdivision
(c) Division into four (d) Division into two Fig. 3: The way of subdivision of mesh
8.
矩形物体の着水解析Cheng
らが行った矩形物体の着水実験と比較し,計算精度の検証を行う.矩形物体の幅
L
を0.076m
とし,鉛直下向きに0.33m/s
の初速度を与える.また,矩形物体の質量を10.22kg
とする.液体の密度と粘性を
10
3kg/m
3,10
−3Pa·s
とし,気体の 密度と粘性を10kg/m
3,10
−4Pa·s
とする.今回用いるメッシュ の要素数は23232,
節点数は11771
である.細分化用に用いた物 体領域ω
メッシュは要素が1200,
節点が641
である.また,細 分化を行わない場合に用いた固体領域ω
メッシュは要素が432,
節点が241
である. Fig.5
に静止液面から測った矩形物体の落下 距離の時間変化を示す.Cheng
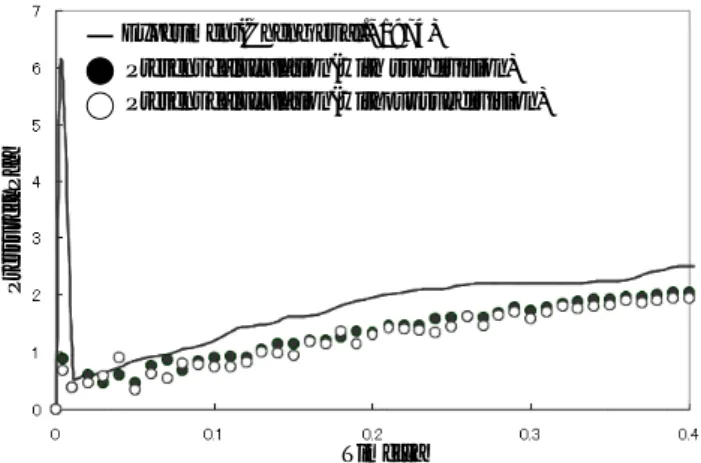
らの実験値とはやや離れてはい るがメッシュの細分化を行い計算を行った方がより実験値に近 づくことが確認できる.Fig.6
は矩形物体底面の中心に働く圧 力の時間変化を示している.メッシュの細分化を施すことによ り,圧力の時間方向における圧力の振動を抑えられていること がわかる.また,圧力の値も向上し,やや実験値に近づいてい る.しかし,水面に着水瞬間におけるピーク圧が細分化を行っ た場合は0.89kPa,
行わなかった場合は0.68kPa
という実験値 とは大きくかけ離れた結果となってしまっている.gravity
20L L
10L 15L 3.14L
Fig. 4: Water entry of a rectangular body
9.
おわりに固体の着水現象を気液固
3
相連成問題として解析する計算手 法の精度向上を目指して,固体の移動に合わせて固体周辺の要 素を細分化する機能を付加し,その効果を検証した.実験結果 との比較を通じて,要素細分化の有効性を確認した.しかし,着水の瞬間に作用する衝撃圧の大きさについて,計算値と実験 値の間には
5kPa
ほどの大きな差があり,今後のさらなる検討 が必要である.Time[s]
Displacement[cm]
Experiment(Cheng et al., 1974) Present caluculation(with subdivision) Present caluculation(without subdivision)
Fig. 5: Time history of the displacement of the body
Time[s]
Pressure[kPa]
Experiment(Cheng et al., 1974)
Present caluculation(without subdivision) Present caluculation(with subdivision)
Fig. 6: Time history of the pressure acting at the center of the impact surface
参考文献