財団法人 機械システム振興協会
委託先 財団法人 無人宇宙実験システム研究開発機構 平 成 22 年 3 月
システム技術開発調査研究 21−R−5
複数衛星連携システムに関する 調査研究
報 告 書
― 要 旨 ―
複 数 衛 星 連 携 シ ス テ ム に 関 す る 調 査 研 究 報 告 書
︱ 要 旨
︱
財 団 法 人 機 械 シ ス テ ム 振 興 協 会 委 託 先 財 団 法 人 無 人 宇 宙 実 験 シ ス テ ム 研 究 開 発 機 構 平 成 年 月 22 3 21
R 5
− −
この事業は、競輪の補助金を受けて実施したものです。
http://ringring-keirin.jp/
序
わが国経済の安定成長への推進にあたり、機械情報産業をめぐる経済的、社会的諸条 件は急速な変化を見せており、社会生活における環境、防災、都市、住宅、福祉、教育 など、直面する問題の解決を図るためには、技術開発力の強化に加えて、ますます多様 化、高度化する社会的ニーズに適応する機械情報システムの研究開発が必要でありま す。
このような社会情勢に対応し、各方面の要請に応えるため、財団法人機械システム振 興協会では、財団法人JKAから機械工業振興資金の交付を受けて、機械システムに関 する調査研究など補助事業、新機械システム普及促進補助事業を実施しております。
特に、システム開発に関する事業を効果的に推進するためには、国内外における先端 技術、あるいはシステム統合化技術に関する調査研究を先行して実施する必要がありま すので、当協会に総合システム調査開発委員会(委員長 東京大学 名誉教授 藤正 巖 氏)を設置し、同委員会のご指導のもとにシステム技術開発に関する調査研究事業を実 施しております。
この「複数衛星連携システムに関する調査研究報告書」は、上記事業の一環として、
当協会が財団法人無人宇宙実験システム研究開発機構に委託して実施した調査研究の 成果であります。今後、機械情報産業に関する諸施策が展開されていくうえで、本調査 研究の成果が一つの礎石として役立てば幸いであります。
平成22年3月
財団法人機械システム振興協会
はじめに
本報告書は、財団法人無人宇宙実験システム研究開発機構が、財団法人機械システム 振興協会から受託した「複数衛星連携システムに関する調査研究」に関し、平成21年 度の調査検討結果をまとめたものです。
宇宙をめぐる我が国の状況は大きく変化しました。議論がなされていた宇宙基本法が平 成20年度に成立/施行され、平成21年度には今後の宇宙開開発や利用の方針を示す宇 宙基本計画が成立しました。これにより、国民生活のために宇宙開発が果たすべき役割 はますます大きくなってきています。また近年は商用ビジネスの本格化も緒についてお り、併せて国際的にも宇宙開発を通じて海外との協力など我が国に期待される役割も増 大してきております。
単独で高い機能性能を有する大型複合衛星に対して、複数の衛星を組み合わせること により達成できる能力は、限定された能力の小型衛星であってもシステムとして高い機 能を実現できる可能性を秘めています。日常生活に欠くことのできない全地球測位シス テム(GPS 衛星 30 機)や、低高度周回衛星を使った通信衛星システムによる船舶の動 態管理(ORBCOMM 衛星 30 機)、小型衛星を複数使った観測衛星(DMC 衛星 5 機)などが 代表例で、更に今後の発展が期待されています。複数衛星システムの実現は、宇宙の利 用の更なる拡大、宇宙産業の振興につながるキーファクタになりえます。
この複数衛星連携システムについて、世界の動向、観測衛星に適用した場合の有効性 などについて、調査研究した結果をまとめたものが本報告書です。この検討にあたって は、本機構内に「複数衛星連携システムに関する調査研究検討委員会:委員長 中須賀 真一 東京大学大学院工学系研究科・航空宇宙工学専攻 教授」を設置し、各分野の専 門の委員の皆様から熱心なご討議、ご指導をいただきました。
本調査研究の成果が関連各社にとって参考となり、機械振興の一助となれば幸いです。
平成22年3月
財団法人 無人宇宙実験システム研究開発機構
目次 序
はじめに
1 調査研究の目的 ... 1
2 調査研究の実施体制 ... 2
3 調査研究成果の要約 ... 6
第 1 章 既存システムのコンセプト調査 ... 9
1.1 概要 ... 9
1.2 複数衛星連携システムに関する国内外動向の調査 ... 10
1.2.1 複数衛星連携システムの定義 ... 10
1.2.2 コンステレーション ... 11
1.2.3 フォーメーションフライト ... 17
1.2.4 動向の調査のまとめ ... 21
1.3 複数衛星連携システムのニーズ調査 ... 24
1.3.1 分野毎の特徴的ニーズ把握 ... 24
第 2 章 複数衛星連携システムの有効性分析 ... 29
2.1 概要 ... 29
2.2 コンステレーション衛星システムの有効性分析 ... 30
2.2.1 観測頻度の向上 ... 30
2.2.2 観測品質の向上 ... 32
2.2.3 シミュレーション: 日本上空での観測区域と衛星数の関係 ... 35
2.2.4 データ取得即応性の向上 ... 38
2.3 フォーメーションフライト衛星システムの有効性分析 ... 39
2.3.1 複数化・連携に着目した有効性分析 ... 39
2.3.2 SAR センサによるフォーメーションフライト衛星システムの有効性分析 .... 41
第 3 章 実現技術の分析 ... 48
3.1 概要 ... 48
3.2 通信技術の調査検討 ... 49
3.2.1 既存の複数衛星連携システムの通信技術調査 ... 49
3.2.2 衛星間通信技術 ... 52
3.3 軌道/姿勢制御技術の調査及び制御方式の検討 ... 54
3.3.1 種々のフォーメーションフライト軌道 ... 54
3.3.2 軌道/姿勢制御方式の調査及び検討 ... 58
3.3.3 フォーメーションフライト実現に向けた技術課題 ... 58
第 4 章 将来複数衛星連携システムの検討 ... 63
4.1 概要 ... 63
4.2 コンステレーションシステムの検討 ... 65
4.2.1 光学衛星コンステレーションによる多頻度/即応観測ミッション例 ... 65
4.2.2 SAR 衛星コンステレーションによるデータ取得即応型ミッション例 ... 67
4.3 フォーメーションフライト衛星システムの検討 ... 75
4.3.1 複数 SAR 衛星システム検討 ... 76
4.3.2 小型/超小型衛星によるフォーメーションフライト衛星システムの検討 .... 81
4.3.3 Satellite Community システムの検討 ... 82
4.3.4 大型構造物構築型フォーメーションフライト衛星システムの検討 ... 86
4.4 運用システム・運用方法及び軌道の検討 ... 88
4.4.1 コンステレーション衛星システムの軌道検討 ... 88
4.4.2 フォーメーションフライトに関する軌道検討 ... 99
4.4.3 運用方法の検討 ... 100
4.4.4 運用システムの検討 ... 106
4 調査研究の今後の課題及び展開 ... 107
参考文献 ... 108
1 調査研究の目的
災害監視、環境観測、安全監視、資源探索などのための地球観測衛星に対する需要及び衛 星取得情報の高分解能化、高性能化、多次元化、高頻度化の要求が増大しているが、現状の 単一衛星による実現では要求達成に限界及びリスクがあり、低価格な(小型)衛星を複数活 用した連携システムでの実現が求められる。
複数衛星連携システムに関する動向として、海外ではGPS/IRIDIUMなどでコンステレー ション注1)の実施例はあるが、フォーメーションフライト注1)の実用例については少ない。
近年、欧米にて低価格な小型衛星の開発研究が急速に進展しており、これらの複数衛星を活 用する運用形態への応用が具体化されつつある。国内では ASNARO(「小型化等による先 進的宇宙システム」(平成20年度―22年度NEDO研究開発プロジェクト))など低コスト 小型衛星の研究開発、太陽光発電衛星の調査研究などが進められており、これらの成果との 連携を活かし、複数衛星連携システムに関する調査研究をスタートするに適切なタイミング である。
複数衛星システムの有効性に関し、定量的な効果及び費用対効果を明確にすることが国家 側の開発計画として立案する場合の論理展開に必要である。
このような背景から、平成21年度より3年間の調査研究期間にて、低価格な小型衛星を 複数活用した複数衛星連携システムに関し、その有効性・実現性を具体化し、国側の開発計 画立案に結びつくシステム構築検討を開始した。
初年度は、コンステレーションやフォーメーションフライトなど既存システムのコンセプ ト調査を実施し、複数衛星連携システムの有効性を評価する。さらに実現化のための技術分 析、技術課題抽出を実施し、将来実現すべき複数衛星連携システムのコンセプト構築を実施 する。
注1)コンステレーション及びフォーメーションフライトは、複数の衛星を運用する形態 例を示すもので、その定義は以下による。
・コンステレーション:広い領域での分散配置(多数の衛星を複数の軌道面に投入)に よるシステム運用形態
・フォーメーションフライト:狭い領域での相互連携配置(多数の衛星を近接する軌道 位置に投入)によるシステム運用形態
2 調査研究の実施体制
本調査研究の実施体制は、(財)機械システム振興協会内に「総合システム調査開発委員 会」を、(財)無人宇宙実験システム研究開発機構内に「複数衛星連携システム検討委員会」
を設置し、本調査研究の計画、実施状況、実施結果について意見・アドバイスをいただきな がら進めた。(財)無人宇宙実験システム研究開発機構が本調査研究の取りまとめを実施し、
衛星システム解析は機構の技術要求に基づき衛星システムメーカに再委託し実施した。国内 外技術調査などは国内調査会社他に外注し実施した。
業務分担に関しては、以下の方針で進めた。
機構において実施計画の詳細化を行い、国内外の複数衛星運用システムや類似システムな どの技術情報の収集を行う。これらのシステムの有効性、実現化のための必要技術、将来複 数衛星連携システムの検討を行い、複数衛星連携システムを実現するための課題抽出と解決 策を明らかにする。機構が実施する計画立案、技術検討などについては、機構内に設置する 技術委員会にて、計画や検討結果の妥当性などについて審議を受ける。
複数衛星連携システム実現のための軌道/制御技術などの衛星システム解析検討に関して は、軌道/制御解析などが実施可能な衛星システムメーカに再委託を予定する。また海外情報 収集、国内外の要素技術情報調査及びシミュレーション解析については、国内の調査会社及 び衛星関係企業に発注して実施する。本調査研究で抽出した技術課題について、大学やその 他研究機関と共同研究をすることで有効に進展すると思われる内容に関しては、積極的に
「学」を活用していく。
委員会
実施体制を以下に示す。
財団法人無人宇宙実験システム研究開発機構
・ 調査研究実施計画策定
・ 全体取りまとめ
・ 国内外の複数衛星運用システムや類似システムなどの技術調査
・ 複数衛星連携システムの有効性分析
・ 複数衛星連携システムの実現化技術分析
・ システム実現のキー要素技術の技術動向調査・分析
・ 将来複数衛星連携システムの構想検討
・ 委員会の運営
構 成:大学、官民の衛星/画像処理関係専門家
審議事項:調査研究計画、動向調査、構想検討の妥当性審査
再委託
・複数衛星連携実現のための軌道/制御方式の検討
・将来複数衛星連携システムの衛星システム検討 外 注
・複数衛星運用に係る小型衛星システムの技術動向調査
・センサ及び通信方式の要素技術動向調査 外 注
・複数衛星連携システムの運用システム技術動向調査
・複数衛星連携システムの運用方法、軌道解析 外 注
・観測衛星などでの複数衛星連携のニーズ、技術動向調査 外 注
・複数衛星連携システムのシミュレーション作業 三菱電機株式会社
日本電気株式会社
富士通株式会社
株式会社三菱総合研究所
LSAS Tec株式会社
総合システム調査開発委員会の委員名簿を以下に示す。
総 合 シ ス テ ム 調 査 開 発 委 員 会 委 員 名 簿
(順不同・敬称略)
委員長 東京大学 藤 正 巖 名誉教授
委 員 埼玉大学 太 田 公 廣 総合研究機構
教授
委 員 独立行政法人産業技術総合研究所 金 丸 正 剛 エレクトロニクス研究部門
研究部門長
委 員 独立行政法人産業技術総合研究所 志 村 洋 文
デジタルものづくり研究センター
招聘研究員
委 員 早稲田大学 中 島 一 郎 研究戦略センター
教授
委 員 東京工業大学大学院 廣 田 薫 総合理工学研究科
教授
委 員 東京大学大学院 藤 岡 健 彦 工学系研究科
准教授
また、(財)無人宇宙実験システム研究開発機構内に置かれた「複数衛星連携システ ム検討委員会」の委員名簿を以下に示す。
氏 名 所 属 中須賀 真一
(委員長)
国立大学法人 東京大学 大学院工学系研究科 航空宇宙工学専攻 教授
池本 多賀史 株式会社ニューズラボラトリー 会長 賀谷 信幸 国立大学法人 神戸大学大学院工学研究科
情報知能学専攻 教授
斉藤 宏文 独立行政法人 宇宙航空研究開発機構
宇宙科学研究本部 宇宙情報・エネルギー工学研究系 教授 坂井 真一郎 独立行政法人 宇宙航空研究開発機構
宇宙科学研究本部 宇宙探査工学研究系 准教授
汐川 雄一 財団法人 資源・環境観測解析センター 企画調査部長 中村 正人 独立行政法人 宇宙航空研究開発機構 宇宙科学研究本部 山田 克彦 国立大学法人 名古屋大学大学院工学研究科
航空宇宙工学専攻 教授
開催した委員会の開催日と主要テーマを以下に示す。開催場所はUSEF会議室。
第 1 回:2009 年 8 月 24 日(月) 調査研究の実施計画に関する審議 第 2 回:2009 年12 月 21 日(月) 調査研究の中間報告に関する審議 第 3 回:2010 年 2 月 25 日(木) 調査研究の最終報告案に関する審議
3 調査研究成果の要約
平成21年度から3年間での調査研究の内容を下図に示す。
平成21年度は以下の4項目についての調査研究を行う。
(1) 既存システムのコンセプト調査
国内外の動向調査を行い、コンステレーションやフォーメーションフライトなど により複数衛星による運用がなされているシステムや、検討がなされているシステ ムを抽出し、そのコンセプトを調査する。
(2) 複数衛星連携システムの有効性分析
上記(1)で調査した既存システム調査結果を分析し、また離散化された複数衛星の 連携運用に対する解析を行うことで、複数衛星を連携させることによる有効性を分 析する。特に複数衛星での連携システムが単独衛星に比較してどのような要素にお いてシステムの有効性が発揮されるかをシーズ・ニーズ両面から整理する。
技術開発プロジェクトの提案・構築
・将来複数衛星連携システムの適用検討
・システム開発構想の具体化 (技術課題解決のための技術 開発計画、複数衛星連携システムの開発計画の立案)
・複数衛星連携システムの最新動向調査
・複数衛星連携システムの実現化検討(技術課題に対する解決策)
・複数衛星連携システムのシステム構築検討
・既存システムのコンセプト調査、ミッション分野別ニーズ分析
・複数衛星連携システムの有効性評価
・実現技術の分析、技術的課題の抽出
・複数衛星連携システムのコンセプト構築
複数衛星連携システム開発プロジェクトの提案・構築
第一段階: 調査研究 FY21
FY22
FY23
第二、三段階: 国家プロジェクト提言
(3) 実現技術の分析
複数衛星連携システムを実現するために必要な技術を分析し、技術的な課題を抽 出する。さらに、既存プロジェクトを含めた適用可能性のある技術(観測センサ、
運用、バスシステム)を抽出する。以上の結果を踏まえ、システムの早期実現のた め、抽出した技術の有効性を分析する。なお、関連した要素技術の調査も併せて実 施する。
(4) 将来複数衛星連携システムの検討
将来実現すべき複数衛星連携システムを運用方法も含めて検討を行う。
検討したシステムの有効性を解析やシミュレーションなどにより明確化する。
本年度の調査研究成果の要約を以下に示す。項目毎に本節1章、2章、3章、4章 にまとめている。
既存システムのコンセプト調査を踏まえ、単独衛星に比較してコンステレーショ ンやフォーメーションフライトなどの複数衛星連携システムが有効性を発揮する要 素(ミッション性能項目:観測頻度、データ即応性、高精度三次元計測、移動体速 度検出など)を明らかにした。これらの要素に対し衛星機数や軌道配置などがどう 影響するかを分析し、複数衛星連携システムの有効性を定量的に整理した。さらに 複数衛星連携システムの実現技術分析として、必要な技術要素及び技術的課題を洗 い出し、主要素である通信技術や軌道/姿勢制御技術などについての調査・分析を実 施した。
以上の調査検討を踏まえ、将来実現すべき複数衛星連携システムについて複数の コンセプトを構築した。
平成21年度実施の4検討項目毎の調査研究成果について以下に整理する。
(1) 既存システムのコンセプト調査
・ コンステレーションやフォーメーションフライトなどの複数衛星による 運用がなされるシステムに関し、国内外の既存プロジェクトを調査・抽 出した。
・ 09 年 度 宇 宙 航 行 ダ イ ナ ミ ク ス 国 際 シ ン ポ ジ ウ ム International Symposium on Space Flight Dynamics 2009 及び AAS 誘導制御学会 33rd AAS Guidance & Control Conference に参加し、フォーメーションフラ イト衛星やコンステレーション衛星技術などの複数衛星連携システムの 海外動向を得た。
(2) 複数衛星連携システムの有効性整理
・ 単独衛星に比較してコンステレーションやフォーメーションフライトに て有効性が発揮される要素(システムやミッション性能項目)を検討し た。
・ コンステレーションでは、有効性評価の対象となる要素として、観測頻 度/再訪周期、データ即応性などが挙げられ、これらの要素に対し群飛行 での機数や軌道配置などがどう影響するかを分析し有効性を定量化でき た。
・ フォーメーションフライトでは、有効性評価の対象となる要素として、
高精度三次元計測、移動体速度検出などが挙げられ、これらの要素に対 し群飛行での機数や軌道配置などがどう影響するかを定量的に分析し有 効性を定量化できた。
(3) 実現技術の分析
・ 複数衛星連携システムに必要な技術要素や技術的課題を抽出した。
・ 関連した要素技術の調査として、フォーメーションフライト軌道技術や 通信技術などの、最新の技術動向を調査した。
(4) 将来複数衛星連携システムの検討
・ 将来実現すべき複数衛星連携システムに関し、運用システムも含め、具 体化のための条件を整理した。
・ 将来実現すべき複数衛星連携システムに関し、複数のコンセプトを構築 した。
・ コンステレーション及びフォーメーションフライトのコンセプト事例に 対し、有効性解析を実施するとともに、可視化シミュレーションを実施 した。
第 1 章 既存システムのコンセプト調査 1.1 概要
国内或いは国外の既存システムの動向を調査し、コンステレーションとフォーメー ションフライトの2種類に整理した。
コンステレーションは、広い領域での分散配置によるシステムで構成され、二つの タイプに分類される。
タイプ A は、多数の衛星を複数の軌道面に投入することで、主に全球に均一にサー ビスを展開するシステムである。例えば GPS 衛星、DMC(災害監視コンステレーション)
などがある。タイプ B は、単一衛星でも所定の機能を有し、例えば観測頻度向上など を目的とした複数連携システムである。Rapideyes(商用コンステレーション)がそれ にあたる。
フォーメーションフライトは、狭い領域での相互連携配置によるシステムで構成さ れ、主に、複数の衛星が相対的な位置関係を維持しつつ、単一衛星では実現できない サービスを提供するシステムである。例えば A-Train(NASA)、TanDEM-X(DLR)、F6(DARPA) などである。
数百 kg 級の小型衛星市場動向における要素技術開発と商用・実用の関係を図 1.1-1 に示す。
図 1.1-1 小型衛星市場動向(数百kg級)
小型衛星市場動向 (数百kg級)
コンステレーション
シリーズ
全球カバー型 観測頻度向上型 Civil/commercial remote sensing
①High-resolution Earth observation
②Landsat-class data for environmental monitoring Military
③Science and technology
④Intelligence, surveillance, and reconnaissance
Civil/commercial communications
⑤Polling of unaffected sensors
⑥Remote site communication 有望な小型衛星市場
【研究開発】
【商用・実用】
-IRIDIUM / IRIDIUM-Next -ORBCOMM / ORBCOMM-Next(AIS) -O3b Networks 他
-DMC/DMC-2 -RapidEye -SAR-Lupe 他
-Myriade (ESSAIM, SPIRALE他) -SSTL100/150 (DMC, RapdEye他) -TACSAT/ORS
-OFEQ (EROS他),OPSAT3000(TechSAR) 小型衛星及び要素技術開発
小型衛星バス開発 小型光学センサ開発 小型SARセンサ開発 小型ミッション機器開発 小型機器開発
フォーメーション技術開発 - Proba-3 (仏)
- CanX-4/5 (加)
フォーメーション
1.2 複数衛星連携システムに関する国内外動向の調査
複数衛星による連携運用(コンステレーション、フォーメーションフライト)を実 施する国内外の衛星プログラムに関し、既存及び計画のプログラム情報及び技術情報 を収集し整理した。
1.2.1 複数衛星連携システムの定義
本調査研究においては、複数衛星連携システムの定義を以下のとおりとする。
1.2.1.1 コンステレーション
多数の衛星を複数の軌道面に投入することで、主に全球に均一にサービス展開する ことを目的とした複数衛星連携システム
【代表例】NAVSTAR GPS(24 機+予備)、Iridium(66 機)
単一衛星でも所定の機能を有するが、例えば、地球観測ミッションなどにおいて、
主に観測頻度の向上を目的とした複数衛星連携システム。
【代表例】DMC(5 機+α)、COSMO-SkyMed(4 機)、 RapidEye(5 機)
1.2.1.2 フォーメーションフライト
主に、複数の衛星が相対的な位置関係を維持しつつ、単一衛星では実現できないサ ービスを提供する複数衛星連携システム。
【代表例】TerraSAR/TanDEM-X、System F6、LISA、DECIGO
1.2.2 コンステレーション 1.2.2.1 全般
本調査研究においては、コンステレーションとは、主に多数の衛星を複数の軌道面 に投入することで、主に全球に均一にサービス展開することを目的とした複数衛星連 携システムのことを指す。本定義に当てはまるコンステレーションの一覧を表 1.2-1 に示す。
表 1.2-1 主要コンステレーション一覧
分野 プログラム名 国、運用機関 主要用途
サービス内容 機数
通信
Iridium Iridium-NEXT
米 Iridium Satellite LLC
米 Iridium Satellite LLC
衛星電話通信 衛星電話通信、
地球観測
66 66+6(
予備 機) 通信 ORBCOMM 米 ORBCOMM LLC 衛星通信 35+18 通信 O3b 英 O3b Networks
Ltd.
低コストブロードバ
ンド 16
地球観測 RapidEye 独 RapidEye 高頻度地球観測(光
学) 5
地球観測 COSMO-SkyMed 伊 ASI イタリア防衛省
偵察
地球観測(レーダ) 4 地球観測 SAR-Lupe 独 国防省 偵察
地球観測(レーダ) 5
地球観測 ACE+ 欧 ESA 大気観測 4
地球観測 GPM 国際協力 高精度観測 8
地球観測 Pleiades 欧 ESA 高頻度地球観測
(光学) 2
地球観測 Eros Israel Aircraft Industries
高頻度地球観測
(光学) 3
地球観測 RADARSAT カナダ CAS 地球観測
(レーダ) 2
地球観測 RADARSAT
Constellation カナダ CAS 地球観測
(レーダ) 3
地球観測 GeoEye
Constellation 米 GeoEye 観測データの
精度向上 5
早期警戒 SBIRS 米 DOD ミサイル警戒、防衛 6
早期警戒 STSS 米 DOD ミサイル発射検知 24
科学探査 Swarm 欧 ESA 地球磁場観測 3
地球観測 ACE+ 欧 ESA 大気観測 4
地球観測 GPM 国際協力 高精度観測 8
地球観測 Pleiades 欧 ESA 高頻度地球観測
(光学) 2
注)ESA:European Space Agency, CAS:Canadian Space Agency, DOD:Department of Defence
1.2.2.2 RapidEye
独 RapidEye 社が 2008 年 8 月 29 日に Dnepr ロケットにより打ち上げた、衛星 5 機で 構成される商業コンステレーションプログラムである。RapidEye 社は 1998 年末に Kayser-Threde と農林業を専門とする保険会社 Vereinigte Hagelversicherung によっ て設立された衛星リモートセンシング事業会社であり、このプログラムでは 5 機の小 型衛星を同じ軌道に等間隔で配備することによる高頻度観測が特徴である。この 5 機 の衛星には、地上分解能 6.5m の光学センサを搭載しており、5 機が同一軌道で周回す ることで、再訪周期 1 日(毎日の観測)を実現している。このミッションは、衛星画 像による地図作成、オルソフォト(正射投影写真図)の作成、自然災害評価、そして 3 次立体視画像の生成を主要な目的としている。 RapidEye の主要諸元を表 1.2-2 に示 す。
表 1.2-2 RapidEye 主要諸元
衛星数 5
衛星質量 166.4 kg
製造 SSTL
ミッション寿命 7 年 軌道高度 620 km 軌道傾斜角 97.8°
太陽同期軌道 周期 96.7 分
赤道通過時刻 11:00am(降交点)
システム構築経緯 2008 年 8 月 29 日 4 機打上げ
1.2.2.3 SAR-Lupe
ドイツ国防省によるレーダ偵察衛星のコンステレーションプログラムで、三つの極 軌道面に対して、5 機の衛星を周回させることで、即応性がありかつ冗長性を持つシス テムの実現を目指している。衛星には、X バンドレーダ画像システム(SAR 合成開口レ ーダ)が搭載されており、1m 以下を識別可能である。衛星製造は OHB-Systems が行っ た。このプログラムは、合成開口レーダによる偵察が主要目的であり、天気、日照度 のデータを取得、軍隊、配備された部隊などへの情報提供、その他、環境保全、資源 開発、災害管理地理データの取得も主要な用途とされている。SAR-Lupe の主要諸元を 表 1.2-3 に示す。
表 1.2-3 SAR-Lupe 主要諸元
衛星数 5
衛星質量 720 kg 製造 OHB-Systems ミッション寿命 10 年
軌道数 3
軌道高度 500 km 軌道傾斜角 98.18°
太陽同期軌道 周期 94.3 分 回帰日数 11 日
システム構築経緯 2006 年 12 月 19 日 :1 号機打上げ 2007 年 7 月 2 日 :2 号機打上げ 2007 年 11 月 1 日 :3 号機打上げ 2008 年 3 月 27 日 :4 号機打上げ 2008 年 7 月 22 日 :5 号機打上げ
1.2.2.4 Iridium
衛星電話会社である Iridium 社によるコンステレーションプログラムである。11 の 軌道面(高度 780km の低高度周回軌道)に対して、各々6 機、計 66 機の衛星を周回さ せることで、全球をカバーする。それにより、高頻度で衛星へのアクセスができるた め、全世界の如何なる場所からも衛星電話の利用を可能としている。また、衛星間通 信(Cross-link)により、世界中に電話をすることが可能である。Iridium の主要諸元を 表 1.2-4 に示す。
表 1.2-4 Iridium 主要諸元
衛星数 66
衛星質量 50 kg ミッション寿命 15 年
軌道数 11 (11 軌道面に各々6 機)
同一軌道上に 6 分間隔で衛星が並ぶ 軌道高度 780 km
軌道傾斜角 86.4°
周期 101 分 回帰日数 11 日
システム構築経緯 1997 年 5 月 5 日:打上げ開始 1999 年 :サービス開始
(現在 66 機が運用中)
2014 年~ :Iridium NEXT に引き継がれる
1.2.2.5 Iridium-NEXT
Iridium 社の次世代プログラムであり、既存システムとの互換性を持つ。主要用途と しては衛星電話事業であるが、それ以外に低解像度画像センサ、海面表面の高さ推定 用レーダ高度計、地球放射線計測用広範囲電波計、大気湿度/温度計測用 GPS 受信機が 搭載されている。また、Iridium 同様に衛星間通信を行うことができるが、Iridium-NEXT ではマイクロ波(Ka バンド)での通信が可能であり、センサデータを撮像から 5 秒後 には地上で受信することが可能である。主要諸元を表 1.2-5 に示す。
表 1.2-5 Iridium-NEXT 主要諸元
衛星数 66
衛星質量 50 kg ミッション寿命 15 年
軌道数 11 (11 軌道面に各々6 機)
同一軌道上に 6 分間隔で衛星が並ぶ 軌道高度 780 km
軌道傾斜角 86.4°
周期 101 分 回帰日数 11 日
システム構築経緯 2007~2008 年 :システム仕様の決定 2009 年 :主契約業者の選定
(現状:Lockheed-Martin と Thales Alenia Space が競合)
2009~2012 年 :システム開発 2012~2014 年 :試験
2014 年~ :順次打上げ
1.2.2.6 ORBCOMM
衛星データ通信会社である ORBCOMM 社による、衛星通信サービスのためのコンステ レーションプログラムであり、地上約 800km の軌道上の 30 機の低軌道周回衛星(LEO)
を利用したデータ通信サービスである。静止衛星に比べ、軌道高度が低いため、簡易・
小型な通信機・アンテナで通信が可能である。その他の機能としては、GPS レシーバー による姿勢制御が可能であり、AIS (Automatic Identification System 船舶自動識別 システム)による、船舶の追跡、航行支援を行うことができる。
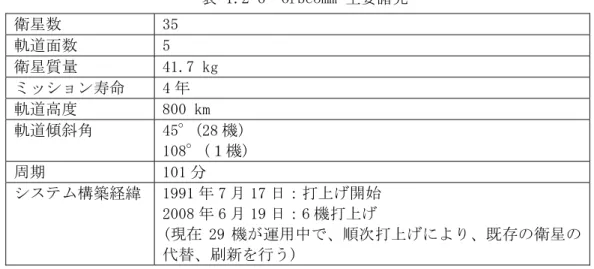
1991 年の打上げ開始以降、現在 29 機が運用中であり、今後順次打上げにより、既存 の衛星の代替刷新を行う。それに際し、Space X が 18 機の ORBCOMM 第二世代打上げ契 約を結んでおり、2010 年後半に打上げ開始予定である。この第二世代では M2M(機器 間)通信能力を現在の 12 倍に強化し、メッセージサイズの増大、AIS 検知能力も増強 される予定である。主要諸元を表 1.2-6 に示す。
表 1.2-6 Orbcomm 主要諸元
衛星数 35
軌道面数 5 衛星質量 41.7 kg ミッション寿命 4 年 軌道高度 800 km 軌道傾斜角 45°(28 機)
108°(1機) 周期 101 分
システム構築経緯 1991 年 7 月 17 日:打上げ開始 2008 年 6 月 19 日:6 機打上げ
(現在 29 機が運用中で、順次打上げにより、既存の衛星の 代替、刷新を行う)
1.2.2.7 O3b Networks
8 機を基本構成とした衛星コンステレーションによる、アジア、アフリカ、ラテンア メリカ及び中東地域を中心とした発展途上国を対象とした低コストブロードバンドサ ービスである。これは、先進国間には海底光ケーブルがあるが、途上国にはその敷設 が困難である点に注目した事業であり Google も出資を行っている。特徴としては、静 止軌道ではなく中軌道であることから、低遅延であり、旋回式アンテナによる地上局 へのデータ送信が可能である。軌道要素としては、O3b の 8 機が同一軌道上に等間隔に ならび、288 分の周期で周回する。また、同一地上局から見て、45 分毎に次の衛星に ハンドオーバーし、一日に 32 回、受信衛星を切り替えるシステムである。衛星の軌道 高度は 8063km と中軌道で軌道傾斜角が 0°であるため、サービスを行うことができる 領域は北緯 45°から南緯 45°に限定される。主要諸元を表 1.2-7 に示す。
表 1.2-7 O3b Networks 主要諸元 衛星数 8 (最終的に 16 までの拡張を目指す)
軌道面数 1 ミッション寿命 10 年
製造 Thales Alenia Space 軌道高度 8063 km
軌道傾斜角 0°
周期 288 分
システム構築経緯 2008 年:Thales Alenia Space と衛星製造契約を締結 2010 年:最初の 8 機を打上げ予定
1.2.2.8 COSMO-SkyMed
イタリア ASI とイタリア防衛省による、軍事目的の偵察と、民間用途の地球観測を 目的としたプログラムであり、重量 1700kg の衛星4機が同一軌道面に 90 度間隔で周 回し、地上から見た場合、最初の衛星通過後(通過する場合にはおおむね午前 6 時、
午後 6 時頃)6°西方を約 24 分後に次の衛星が通過するコンステレーションを構成す る。主要用途は、偵察、地上構造物の把握や、自然災害による被害状況の把握であり、
天候を問わず観測できる。主要諸元を表 1.2-8 に示す。
表 1.2-8 Cosmo-SkyMed 主要諸元
衛星数 4
軌道面数 1
衛星質量 1700 kg ミッション寿命 5 年 軌道高度 619.6 km 軌道傾斜角 97.86°
赤道通過時刻 06:00 (降交点)、18:00 (昇交点) 回帰日数 16 日
システム構築経緯 2007 年 6 月 7 日 :1号機打上げ 2007 年 12 月 9 日 :2 号機打上げ 2008 年 10 月 24 日:3 号機打上げ 2010 年初頭に 1 機打上げ予定
1.2.2.9 RADARSAT Constellation
2014 年以降に打上げが予定されている Canadian Space Agency (CSA)による C-バン ド SAR 衛星 3 機によるコンステレーションプロジェクトであり、流氷、風速の把握、
事故による石油汚染監視、船舶監視などの海洋調査や、被害軽減、警戒、応答、復興 対策などに用いる災害管理や、森林、農業、湿地のモニタリング、海岸変化抽出など のエコシステムモニタリングが主な目的となっている。主要諸元を表 1.2-9に示す。
表 1.2-9 RADARSAT Constellation 主要諸元
衛星数 3
軌道面数 1
衛星質量 1300 kg 以下 ミッション寿命 7 年
軌道高度 600 km 回帰日数 12 日
システム構築経緯 2014 年:1 号機打上げ
2015 年:2 号機打上げ、2016 年:3 号機打上げ
1.2.3 フォーメーションフライト 1.2.3.1 全般
本調査研究においては、フォーメーションフライトとは、主に、複数の衛星が相対 的な位置関係を維持しつつ、単一衛星では実現できないサービスを提供する複数衛星 連携システムのことを指す。本定義に当てはまるフォーメーションフライトの一覧を 表 1.2-10に示す。
表 1.2-10 フォーメーションフライト一覧
分野 プログラム名 国、運用機関 主要用途、サービス内容 機 数 地球観測 TerraSAR-X
/TanDEM-X
独 DLR 地球観測(レーダ) / 高精度 DEM(数値標高モデ ル)作成
1/
1 地球観測 A-train 米 NASA 他 大気、地表データの高精
度化
6 地球観測 Formosat-3/COSMIC 米大気科学大学連合
台湾 宇宙計画局
大気観測 6
地球観測 EO-1/Landsat 米 NASA 観測データの精度向上 2 地球観測 Cluster 欧 ESA プラズマ三次元計測 4 地球観測 ERS-2、 Envisat 欧 ESA 高精度 DEM 作成 2 地球観測 Space Technology 5 米 NASA、 OSC 地球磁場観測衛星 3 技術実証 System F6 米 DARPA 複数衛星の利点検証
実証試験 Orbital Express 米 DARPA、NASA 軌道上実証実験 2 軍事衛星 ESSAIM 仏国防省 通信傍受衛星 4
軍事衛星 ELISA 仏国防省 偵察監視衛星 4
科学探査 GRACE 米 NASA、独 DLR 高精度重力場測定 2 科学探査 LISA 欧 ESA、米 NASA 高精度重力場測定 3 科学探査 DECIGO 日 JAXA 高精度重力場測定 3 科学探査 XEUS 欧 ESA X 線宇宙観測衛星 2 科学探査 Darwin 欧 ESA 惑星大気化学成分分析 7
注)OSC: Orbit Science Corporation、DLR:ドイツ航空宇宙センター
1.2.3.2 TerraSAR-X / TanDEM-X 1.2.3.2.1 概要
TerraSAR-X 及び TanDEM-X は、ドイツの DLR と EADS Astrium の官民協力プロジェク トである。2007 年 6 月に TerraSAR-X が打ち上げられ、TanDEM-X は 2010 年に打上げ予 定となっている。主要用途としては、高精度 DEM 作成、地形、陸地表面、土木計画作 成とマッピング、環境モニタリングなどが挙げられている。
同一仕様の 2 機の衛星によるフォーメーションフライトであり、1km 以下の近距離で 飛行し、地上の同一エリアに対して、各々の衛星から測定することで、高精度の DEM 作成が可能となっている。これにより、全球、高精度 DEM データを提供し、マーケッ トの先取りすることを狙っている。なお、ミッション機器は X バンド SAR である。な お、高精度 DEM データ生成の実現とともに、Along-track InSAR(直列配置)による移動 体の速度抽出、Bistatic mode(送信衛星、受信衛星分離)の実証といった新規技術に も取り組む予定である。
TerraSAR-X / TanDEM-X の主要諸元を表 1.2-11 に示す。なお、両衛星が採用してい る HELIX 軌道とは、軌道が交わることを避けることで、衝突のリスクを低減する軌道 である。
表 1.2-11 TerraSAR-X/TanDEM-X の主要諸元
衛星数 2
衛星質量 1230kg ミッション寿命 5 年 軌道数 HELIX 軌道
軌道高度 514km(TerraSAR-X)
軌道傾斜角 97.44°(TerraSAR-X)
赤道交差時刻 06:00 (降交点)、18:00 (昇交点) 回帰日数 11 日
システム構築経緯 2007 年 6 月 15 日:TerraSAR-X 打上げ 2010 年上半期:TanDEM-X 打上げ予定
1.2.3.3 A-train
A-train は、高度 690kmの同一太陽同期軌道上に、7 機の衛星が非常に短い間隔でフ ォーメーションフライトを行うプログラムである。7 機が数分間隔で並んで順番に観測 するため、気象・大気条件などの変化が少ない状況での観測が可能となる。そのため、
気候変動において重要なパラメータの解析精度の向上が期待できる。なお、7 機は、OCO、
Aqua、CloudSat、CALIPSO、PARASOL、Glory、AURA の順の予定であったが、OCO が打上 げ失敗に終わってしまっている。A-train の各衛星の詳細を表 1.2-12 に示す。
表 1.2-12 A-train の各衛星の詳細
衛星 目的 打上げ日時
OCO 温室効果ガス観測 2009年2月24日打上げ失敗
Aqua 気温、湿度観測 2002年3月4日打上げ
CloudSat レーダによる雲観測 2006年4月28日打上げ
CALIPSO 雲・エアロゾル及び赤外放射輝度の観
測
2006年4月28日打上げ
PARASOL Lidarによる地球観測衛星 2004年12月18日打上げ
Glory エアロゾル、ブラックカーボン量測定 2010年10月1日打上げ予定
Aura オゾン層、大気の品質、気候パラメー
タの観測
2004年7月15日打上げ
1.2.3.4 GRACE (Gravity Recovery and Climate Experiment)
Grace(Gravity Recovery and Climate Experiment)ミッションは、2 衛星のフォー メーションフライトによる高精度重力場測定を目的とした NASA と DLR の共同プログラ ムである。二つの衛星間の距離(数 100km)をマイクロ波で高い精度で測定し、互いの 衛星の速度変化を算出することで、空間的・時間的な重力変化を検出することを目指 している。GRACE の主要諸元を表 1.2-13 に示す。
表 1.2-13 GRACE の主要諸元
衛星数 2
衛星質量 432 kg ミッション寿命 5 年 軌道高度 485 km 軌道傾斜角 89°
周期 90 分
システム構築経緯 2007 年 3 月 17 日打上げ
1.2.3.5 LISA (Laser Interferometer Space Antenna )
LISA(Laser Interferometer Space Antenna)は、太陽の軌道上で重力波を検出し、
宇宙空間の歪みを検出することを目指したプロジェクトである。ESA と NASA による計 3 機の衛星により 1 辺が約 500 万 km の正三角形を形成し、Michelson 干渉計を使うこ とで重力波を通過する時に発生する宇宙の歪みを測定する計画となっている。
また、将来の LISA プロジェクトに利用される要素技術を検証するために LISA Pathfinder というプログラムが計画されている。機器の無重力下での動作の検証、レ ーザ干渉の検証、レーザ・光学センサの信頼性検証などを目的としたプログラムであり、
L1 ラグランジュ点を周回する Heliocentric Orbit(ハロー軌道)上に投入する計画であ る。LISA Pathfinder は、2010 年に打上げ予定である。
1.2.3.6 DECIGO
DECIGO は、0.1~10 Hz の周波数帯での重力波観測を通じ、宇宙誕生について解明す ることを目指したプログラムである。重力波により衛星間の距離の変化がもたらされ るため、互いに 1000km 離れた 3 機の衛星間の距離変化を測定することで重力波を観測 する。
現在は、JAXA の小型科学衛星シリーズの搭載ミッション候補の一つである。2012 年 に要素技術実証実験プログラムである DECIGO パスファインダー(小型衛星 1 機)によ り、衛星 1 機の中に浮かぶ二つの鏡間の距離変化をレーザ干渉計で測定、2018 年に Pre-DECIGO として、衛星 3 機、干渉計 1 機により重力波検出の実証をし、更に 2024 年 に DECIGO プログラムとして、衛星 3 機、干渉機 3 機により重力波天文観測を行うとい う構想である。なお、レーザによる重力波観測では、レーザ距離(衛星間の距離)が 長いほど高精度に重力波を測定可能である。
1.2.3.7 System F6
System F6 は、米国 DARPA が推進しているプロジェクトであり、大型衛星一つが行う 役割を単機能小型衛星に分散させることで達成するプログラムである。単機能小型衛 星に分散させることにより、柔軟性、メンテナンス性、コスト低下、適用性及び冗長 性といった利点が発生すると説明されている。
1.2.3.8 ESSAIM
ESSAIM は、通信傍受、電磁環境分析、そして将来の電子偵察システムの実証試験を 目的としたプロジェクトである。4 機が各々2300km 離れ周回するフォーメーションフ ライトであり、1 日に約 10 分の電磁放射線計測を 4 回行っている。
ESSAIM の主要諸元を表 1.2-14 に示す。
表 1.2-14 ESSAIM の主要諸元
衛星数 4
衛星質量 120 kg 製造 EADS Astrium ミッション寿命 3 年
軌道数 二つの極軌道に 2 機ずつ 軌道高度 660 km
軌道傾斜角 98.1°
システム構築経緯 2004 年 12 月 18 日:4 機同時に打上げ
1.2.3.9 ELISA
ELISA(ELectronic Intelligence by Satellite)は、将来の電磁偵察プログラムに 向けた試験衛星であり、ESSAIM の後継プロジェクトとの位置づけである。レーダ施設 の識別を行うことも目的としており、ミッション機器として、全球を正確に電磁的に マッピングするレーダ送信機を搭載している。4 機が互いに数 km 間隔で隊列を組むフ ォーメーションフライトであり、通信を傍受している。2010 年打上げ予定である。ELISA の主要諸元を表 1.2-15 に示す。
表 1.2-15 ELISA の主要諸元
衛星数 4
衛星質量 135 kg 製造 EADS Astrium ミッション寿命 5 年
軌道 太陽同期回帰軌道
軌道高度 600~800 km システム構築経緯 2010 年打上げ予定
1.2.4 動向の調査のまとめ
近年の傾向としては、2001 年に打ち上げられた 8t 級の Envisat 以降、プラットフォ ーム型の大型地球観測衛星は姿を消しており、小型複数機によるコンステレーション が流行し始めており、顕著な例として RapidEye、SAR-Lupe が挙げられる。また、SAR-Lupe、
COSMO-SkyMed のような偵察目的の SAR 衛星などにも、コンステレーションにより、観 測頻度を上げる傾向が見られている。また、TerraSAR-X/TanDEM-X のような SAR フォー メーションフライトが新技術として注目されている。一方で、GeoEye、WorldView など のように、単機による地上分解能(GSD)1m 未満の高分解能光学センサ衛星に対する需 要は、依然として存在する。
以上より、衛星プロジェクトのトータルコストを同じにした場合の、空間分解能、
撮像可能データ量、観測頻度、地上誤差について単機と複数機の長所、短所を検討し たものを表 1.2-16 に示す。
表 1.2-16 大型単機、小型複数コンステレーション(例)比較
小型複数機 大型単機
機数 5 機以上 1
再訪期間 毎日(全体として) 10 日弱
搭載機器 マルチ パンクロ、マルチ、ハイパー、
(SAR)など複数搭載可 ストレージ 50 Gbits 1000 Gbits
地上誤差 CE = 200m CE = 20m ダウンリンク 100 Mbps 500 Mbps 1 機の衛星重量 200 kg 弱 2000 kg
大型衛星は、高い空間分解能や広い観測幅、各種のセンサなどを搭載することがで き、多種(光学/電波などの種類、周波数のスペクトラム)/大量のデータを記録し早 い速度で観測データを地上へ伝送することが可能である。一方、小型衛星の場合には、
センサの能力は限定される(周波数、種類、空間分解能及び観測幅などが制限される)
ものの、複数衛星を連携した場合には、頻度の高い観測が可能になる。また、技術開 発の進歩により、小型衛星へのデータ蓄積量が次第に増え、小型衛星へ搭載可能なセ ンサも改善が進められている。小型衛星に搭載可能なセンサについては、観測幅の限 界もあるが、複数の衛星を連携させることによりトータルシステムとして広い観測幅 も実現することが可能である。
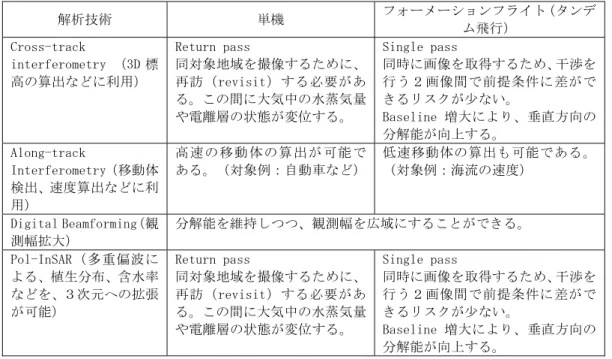
また、SAR のフォーメーションフライト(タンデム飛行)の単機に対する利点につい て検討すると、解析技術の視点では表 1.2-17 に示す比較結果となり、タンデム観測モ ードの視点では表 1.2-18 に示す比較結果となる。
表 1.2-17 SAR 単機、フォーメーションフライト(タンデム)比較(解析技術)
解析技術 単機 フォーメーションフライト(タンデ
ム飛行)
Cross-track
interferometry (3D 標 高の算出などに利用)
Return pass
同対象地域を撮像するために、
再訪(revisit)する必要があ る。この間に大気中の水蒸気量 や電離層の状態が変位する。
Single pass
同時に画像を取得するため、干渉を 行う2画像間で前提条件に差がで きるリスクが少ない。
Baseline 増大により、垂直方向の 分解能が向上する。
Along-track
Interferometry(移動体 検出、速度算出などに利 用)
高速 の移 動 体 の算 出が 可 能 で ある。(対象例:自動車など)
低速移動体の算出も可能である。
(対象例:海流の速度)
Digital Beamforming(観 測幅拡大)
分解能を維持しつつ、観測幅を広域にすることができる。
Pol-InSAR(多重偏波に よる、植生分布、含水率 などを、3次元への拡張 が可能)
Return pass
同対象地域を撮像するために、
再訪(revisit)する必要があ る。この間に大気中の水蒸気量 や電離層の状態が変位する。
Single pass
同時に画像を取得するため、干渉を 行う2画像間で前提条件に差がで きるリスクが少ない。
Baseline 増大により、垂直方向の 分解能が向上する。
表 1.2-18 SAR フォーメーションフライト(タンデム観測モード)単機に対する利点
観測モード 概要 利用可能な技術 単機に対する利点
Monostatic mode 2 機が Along-track 方向(同 一軌道の前後)に 30~50 km 離れて飛行
画 像 の 差 分 抽 出 に よ る、変化量抽出 Along-track InSAR
Revisit するよりも、短い 時間における変化量抽出 や、低速移動体検出が可能 Cross-track InSAR Bistatic mode で行う同期 が不要なので、InSAR によ る DEM の高精度化が可能 Bistatic mode 2 機がほぼ横並びに飛行
1 機が送信したパルスを、2 機が受信
Bistatic SAR 都市域における多重散乱 の影響を少なくする 前方散乱波を受信するこ とにより、S/N 比が高い画 像が得られる
Cross-track InSAR InSAR を行う際に、同対象 地域を撮像するために、再 訪(revisit)する必要がな い
Alternating Bistatic Mode
2 機がほぼ横並びに飛行 1機が送信したパルスを、2 機が受信
パルス毎に2機が交互にパ ルスを送信
Cross-track InSAR 衛星それぞれの持つ発振 器の位相誤差を補正する ことが可能
以上の動向調査を踏まえて、複数衛星連携システムにおけるニーズ調査を次章以 降で検討する。
1.3 複数衛星連携システムのニーズ調査
災害監視、環境観測、安全監視、資源探査などの地球観測ミッションに関し、最新 動向を情報収集するとともに、本ミッションにおける、複数衛星連携システムに対す るニーズを調査・分析し、代表的なニーズに対してミッション例を示した。
1.3.1 分野毎の特徴的ニーズ把握 1.3.1.1 ニーズ整理
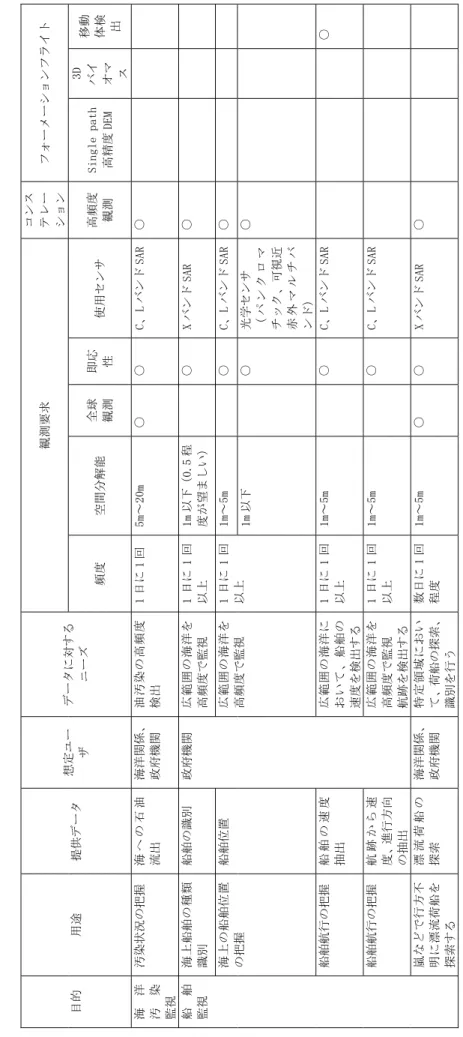
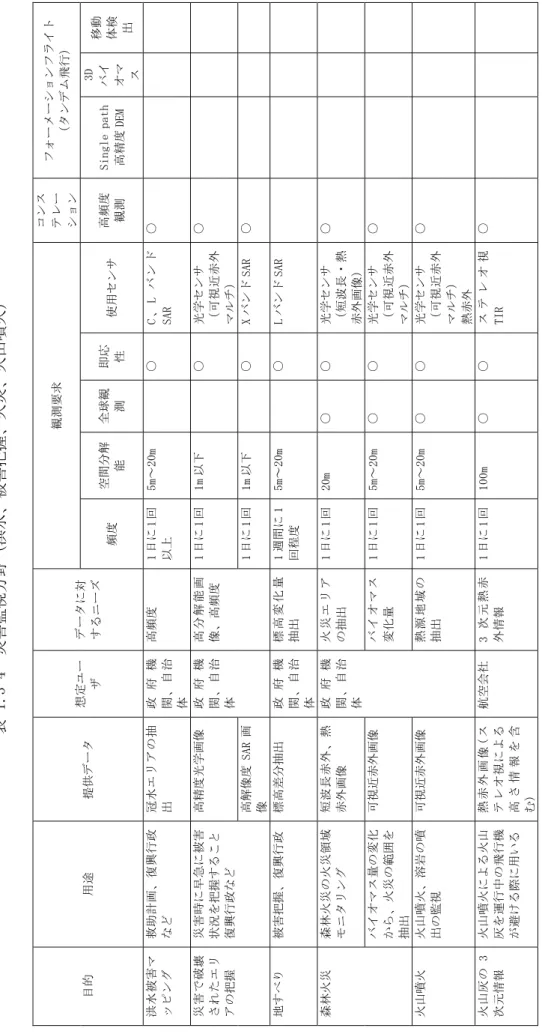
環境分野、海洋監視、安全監視、災害監視分野における地球観測ミッションに対す る複数衛星連携システムに対するニーズを表 1.3-1、表 1.3-2、表 1.3-3、表 1.3-4にそ れぞれ示す。
表 1.3-1 環境分野 目的 用途 提供データ 想定ユ ーザデータに対する ニーズ 観測要求 コンステレー ション フォーメーションフライト 頻度空間分 解能全球観 測 即応 性 使用セ ンサ高頻度観測 Single path 高精度DEM
3D バイオ マス
移動体 検出 バイオ マス測 定
自社が管理 している森 の伐採、植 林の管理
測定対象におけ るバイオマス量 を算出 (植生密度、LAI など)
林業、製 紙業多地域にわたる 小規模な森の育 林から伐採まで の管理が容易で ないため 生育状況の把握 が望ましい
1ヶ月程 度 5m~20mLバンド SAR ○ 京都議定書 で規定され ている、環 境負荷を埋 め合わせる ための植林 活動の効果 測定
一般企 業 低コストでの森 林管理を行う 1ヶ月程 度 5m~20mLバンド SAR ○ 世界的な環 境保全や温 暖化対策の 研究
大学、研 究所高精度な植生デ ータ2ヶ月程 度 1m~5m○Lバンド SAR ○ ヒート アイラ ンド監 視
行政指導、 研究など 都市域のビルな どから排出され る熱量を観測
政府機 関、自治 体、研究 者
熱量の検出 1日以下20m(都 市1ブロ ック)
○ TIR(熱 赤外) ○
表 1.3-2 海洋監視分野(船舶、海洋汚染監視) 目的 用途 提供データ 想定ユー ザ データに対する ニーズ 観測要求 コンス テレー ションフォーメーションフライト 頻度 空間分解能 全球 観測即応 性 使用センサ 高頻度 観測Single path 高精度DEM
3D バイ オマ ス
移動 体検 出 海洋 汚染 監視
汚染状況の把握 海への石油 流出海洋関係、 政府機関 油汚染の高頻度 検出1日に1回5m~20m○○C、 LバンドSAR○ 船舶 監視海上船舶の種類 識別船舶の識別 政府機関 広範囲の海洋を 高頻度で監視 1日に1回 以上1m以下(0.5程 度が望ましい) ○XバンドSAR○ 海上の船舶位置 の把握 船舶位置 広範囲の海洋を 高頻度で監視 1日に1回 以上1m~5m○C、LバンドSAR○ 1m以下 ○ 光学センサ (パンクロマ チック、可視近 赤外マルチバ ンド)
○ 船舶航行の把握 船舶の速度 抽出広範囲の海洋に おいて、船舶の 速度を検出する
1日に1回 以上1m~5m○C、LバンドSAR○ 船舶航行の把握 航跡から速 度、進行方向 の抽出
広範囲の海洋を 高頻度で監視 航跡を検出する
1日に1回 以上1m~5m○C、LバンドSAR 嵐などで行方不 明に漂流荷船を 探索する
漂流荷船の 探索海洋関係、 政府機関 特定領域におい て、荷船の探索、 識別を行う 数日に1回 程度1m~5m ○○XバンドSAR○