高速歩行のための四脚歩行ロボットの開発
Development of Quadruped Walking Robot for Time Optimal Control
精密工学専攻 4 号 石橋武則 Takenori Ishibashi
1. 序論
脚型歩行ロボットの研究分野において様々な研究が進め られているが,それらの多くは,ロボットの安定性や不整地 での歩行に関する研究であり,ロボット自身による高速歩行 の研究はあまりされていない現状がある.
脚型歩行ロボットの歩行の高速化は,作業効率の向上,そ れに伴うコスト削減,危機回避能力の向上が上げられ,非常 に重要な要求の一つである.
先行研究において四脚歩行ロボット ERS-7 を用いて,
Bobrow らの提案した最短時間制御
(1)~(4)を応用すると同時に,
支持脚間距離,胴体高さ,胴体部傾き等の胴体姿勢を考慮し,
さらには前後支持脚の力配分を考慮した歩行の高速化を提 案してきた
(5)(6).その際,構築した最速歩行モデルを用いた 解析結果とシミュレーションにおける歩行を比較,考察し妥 当性を示してきた.しかし,歩行時の AIBO の内部状態を十 分にモニタリングすることができてない問題が生じている.
本研究では,これらの研究を受けて,構築したモデルでの 歩行の際に重心位置や現在,脚の質量なしと考慮している遊 脚の歩行動作における胴体部に与える反力の影響,ERS-7 で 取ることのできないデータからの歩行の解析を実現し,これ までの理論の汎用性の妥当性を検討したいと考えている.そ のため,更なる脚型歩行ロボットの高速化を実現すべく,新 たな脚歩行ロボットの開発を目的としている.
2.四脚歩行ロボットの動力学モデル
2.1 運動学モデル
ERS-7 の運動モデルを Fig.1 に示す.四脚歩行ロボットであ
る SONY 製の ERS-7”AIBO”は各脚に 3 自由度を持っている.
ただし,本研究では直進方向のみの運動を考えるので,それ ぞれの脚の 2 自由度のみを示している. Fig.1 は,支持脚のみ が示されており,遊脚は省略されている.また,歩容はトロ ット歩容を用いている.なお,胴体部の質量に比べ各脚の質 量は小さいので,遊脚の運動による胴体部に発生される力学 的な影響を無視している.
Fig.1 Kinematic model of quadruped walking robot 参照座標 ∑
wを後脚と地面との接触点にとる.重心は水平 線上を移動することとし,胴体部の姿勢も歩行中は常に一定 とする.これにより, Fig.2(a)で表されるように支持脚の全て の関節角度を距離パラメータ‘ s ’で表すことができる.遊 脚先端位置は,Fig.2(b)のように胴体部移動距離 s と,胴体か ら脚先端までの相対距離 s
sの和で表すことができる.なお,
歩行時における支持脚中の移動距離 s と,遊脚中の移動距離 s
sは,歩行の半周期でちょうど同じ歩幅 T となる.また, s は胴体重心が前後脚中の真上を通る地点を 0 と定義し,は脚 先がちょうど脚の付け根にあたる肩の真下に来た時 0 と定義 する.よって,歩行の半周期の間に s , s
sはそれぞれ − T / 2 か ら T / 2 の間の値をとる.
(a) Supporting phase (b) Swinging phase Fig.2 Desired path and distance parameters ‘s’ and ‘s
s’ 2.2 動力学モデル
Fig.1 で表されるモデルは,後支持脚の接地点をベース,前
後支持脚の接地点を手先とするマニピュレータとみなすこ とができる.この時,支持脚の接地点は半周期の間は動かな い.このマニピュレータの運動方程式は式(1)のように表すこ とができる.
Front leg Rear leg
Link f1
Link f2 Link r2
θ
b 2θ
r2
θ
f3
θ
f 3θ
rF
byF
fxF
bx fyF
∑ w
r
0h
rh
f( ) ( )
( )
[ ]
[
r r f f]
Tsp
T f f r r rp sp
sp spc sp sp
f sp sp sp s sp sp s sp
2 1 2 1
2 1 2 1
0
, sgn
τ τ τ τ
θ θ θ θ θ
=
=
+ +
+ +
=
τ θ
θ Γ θ Γ
F J θ , θ h θ θ H
τ
T&
&
&
&
&
(1)
ここで, H
sは 慣性行列, h
sは非線形項, Γ
sはクーロン 摩擦トルク, Γ
spcは各モータの減衰係数行列, F
fは地面か ら前脚先端に受ける反力ベクトルを示している.胴体部の関 は受動関節とみなせるため,トルク 0 である.
胴体軌道は水平とするので,各脚の関節角度は,距離 s と
胴体部の高さ h であらわすことができる.これにより関節角 度ベクトル θ
sの全ての要素がパラメータ s で表すことがで
きる.
アクチュエータには,DC サーボモータを利用するので,
入力電圧と出力トルクは式(2)の関係となる.
sp
sp
K θ R K τ
V =
E& +
a T−1(2) ここで電源からモータへの供給電圧の最大値,最小値をそ れぞれ V
spmax, V
spminとすると,式 (2) の電圧 V
spには式( 3 )の 制限が課せられる.
max
min sp sp
sp
V V
V ≤ ≤
(3)
さらに,支持脚の地面からの反力は,摩擦により式( 4 ) の制限を受ける .
fy fx fy by bx
by
f f f f f
f µ µ µ
µ ≤ ≤ − ≤ ≤
− , (4)
ここで µ は地面と脚先間の最大静止摩擦係数である.
さて,式(2)に式(1)を代入し, θ
sの全ての要素をパ
ラメータ s によって表現すると
) , ( )
(
21
s s
sps s
sp
sp
c & & c &
V = +
( 5 )
と, V
spを s の加速度成分とそれ以外の項の和として表すこと ができる.
同様に,遊脚の関節角度は
s
sで表すことができ,式 (5) と 同様に電圧を入力とした運動方程式は式(6)と表現するこ とができる.
) , ( )
( )
(
1 21 s s sp sw s s
sw
sw
c s s & & c s & s & c s s &
V = + + (6)
なお,遊脚は地面と接触しないので式 (4) の拘束はない.
2.3 加速度軌道の生成
歩行中,ロボットの ZMP は支持脚の接触点が作る多角形 の中になければならない.本研究においてこの条件を満たす ZMP の位置は,前後支持脚接地点の中点となる.よって,
Fig.3 のように ZMP が中点となるように加速度を決定する必
要がある.重力は一定であり,しかも重心は高さ h の水平線 上を移動するので,重心の位置を決めてしまうと,その位置 での重心の水平方向加速度は式(7)のように一意に定まって しまう.
h s
s & = g
& (7)
これを解くと,
) (
t h t g h g
e e C
s = +
−(8) が得られる.
よって, s − s & 面における s の軌道は Fig.4 のように左右対
称になり一旦支持脚から遊脚への切替点の s の値 s
iと s = 0 における速度の値 s &
0が決定されれば, s の軌道は一意に決定
される.この s
iは歩幅の半分の値であるので,つまり,最速 歩行の設計は,与えられた全ての拘束条件の下で,最速を実 現する歩幅と,重心が ZMP の真上を通過する時の速度を決 定する問題となる.
ZMP
s
M & &
s
h g
F
rx ZMPF
fxs
M & &
ss
h g
F
rxF
fxFig.3 Constraint imposed on ZMP
Fig.4 Trajectory shape in s - s & phase plane
3.開発する四脚歩行ロボットの仕様
四脚歩行ロボットを開発するにあたり,本研究で想定して いるロボットの仕様の参考に「鉄犬 2」
(7)を用いた.
鉄犬 2 の機構や大きさ,モータの出力を参考にすると同時 に,前述した歩行解析や理論の汎用性を確認する目的を踏ま えて,開発するロボットを以下のように検討した.
・ 対人性,実験機として移動範囲,重さを考慮しに 50cm
3収まる小型の脚型歩行ロボット
・ 現研究で想定している出力のトルクを発揮できるモ
ータ考慮し,全体の重さ 10 kg 以内にする
・ エンコーダ,力センサ,ジャイロセンサなど必要とさ れるセンサの搭載
・ 現在の実機でのサンプリング周期よりも向上させ,よ り的確な歩行解析の実現
4.トルク限界のシミュレーション
前述した仕様からロボットの胴体,前腕,前脚,後腕,後 脚それぞれの質量と長さ,支持脚間距離を与え,歩行に必要 なトルク選定のために前後支持脚にかかるトルクのシミュ レーションを行った.
前脚接地点からの反力ベクトルを F
f,後脚接地点からの 反力ベクトルを F
rとし,進行方向成分である前脚の推進力 を F
fxと後脚推進力を F
rxとおき,地面からの垂直抗力を F
fy,
F
ryとする.このとき,歩行ロボットの推進力 F は以下の式 (9)で表すことができる.
rx
fx
F
F
F = + (9)
F
rxF
fzF
rzr
0r
gF
fxF
rxF
fzF
rzr
0r
gF
fxFig.5 Generated friction force at the tip of legs 前脚と後脚の推進力 F
fxと F
rxが同配分以外の値をとる とき,Fig.5 のように回転方向にヨーモーメントが発生する.
よって,脚先が滑らないようにするための摩擦の拘束条件は 式 (10) となる.ここで j は f (前脚) , r (後脚)であり, µ は脚先と地面との静止摩擦係数である.
(
jx jz)
jyjy
F F F
F µ
µ ≤ + ≤
−
2 2(10)
また,式(9)により胴体に目標加速度を発生するための前後 脚による推進力には冗長性が存在する.よって,それぞれの 脚先で発生する力の配分率を後脚の推進力配分率 α を用い
て式のように表すことができる
( ) M s
F
fx= 1 − α & & (11)
s M
F
rx= α & & (12)
式(11),式(12)から α が変化する値の中から最適な数値を
使用する. α の数値の範囲は Fig.6 に示す.
Fig.6 Range of α
以上の条件から適当な数値を与え,歩行に必要なトルクが 最小となるような値を求めた.シミュレーション結果を Fig.7 に示す.
Fig.7 Torgue limit of each joint
歩幅 240 mm ,胴体部の高さ 190 mm と設定し,シミュレー ションを行った結果,歩行中に最も負荷のかかる関節に必要 なトルクは, 3 . 53 [ N ⋅ m ] となった.
このトルクの条件を満たし,ロボットに搭載できるモータ の大きさ,重さ,減速比を検討した結果,膝,肩それぞれに MAXON RE25 20 [ ] W を搭載するように決定した.また,同様 に検討しモータ取り付けられるギアの減速比は 86:1 である.
5.四脚歩行ロボットの概要
5.1 開発歩行ロボットの仕様
最適な脚部のトルク配分から得られるシミュレーション により必要とされる出力のモータ,ギアから決定したロボッ トの脚部の仕様を Table 1 に示す.歩行ロボットの制御には,
リアルタイム OS である ART-Linux を搭載することを検討し て SH4 を用いたボードを選定した.また,選定した I/O ボー ドは,デジタル I/O,A/D 変換,D/A 変換,PWM パルス変換,エ ンコーダパルス入力を備えており,エンコーダ値を読み取り,
モータドライバを介することでフィードバック制御を実現
するように検討した.
Table 1 Specification of robot
四脚歩行ロボットの仕様
本体材質 アルミニウム合金(A2017)
マイコンボード General Robotix HRP-3P-CN-A I/O ボード General Robotix HRP-3P-MCN
モータ maxon DC モータ,出力 20W
ギアヘッド maxon プラネタリギアヘッド,減速比 86:1
腕 協育歯車 平歯車 S75S40B+0606,S75S60B+0606
ギア
協育歯車 マイタギア M1S20+2106
ン maxon ンコー
( ウント/ ) 1000
H 200
位置,回転検出
ンネル 3
モータドライ S Mi roele troni 6203
脚質 627
5.2 ロボットの脚
モータの制御には PWM 制御を用いる.摩擦係数,重力など を検討し,脚の各関節に角度指令を与え,P 制御により比例 ゲインを与えて目標関節角度の制御を実現しようとしてい る.具体的な本開発機の制御システムを Fig.9 に示す.
PC
General robotics CPU Module HRP-3P-MCN General robotics
CPU Module HRP-3P-CN-A
MAXON MOTOR
DC Motor RE25 Encoder
Encoder MAXON MOTOR
DC Motor RE25 PC
General robotics CPU Module HRP-3P-MCN General robotics
CPU Module HRP-3P-CN-A
MAXON MOTOR
DC Motor RE25 Encoder
Encoder MAXON MOTOR
DC Motor RE25
Fig.9 Robot system
6.ロボットの脚の開発
前後支持脚において,最適なトルク配分の実現を想定した 最短時間制御のシミュレーションから得たデータをもとに 脚を設計し,構想,概要の要求を満たすように脚部を開発し た.各パラメータを Table 2 に示す.
支持脚間距離は 500 [ mm ] とシミュレーションで定めた.ま た,肩,腕関節でのモータの出力トルクと回転数を考慮して,
選定したマイタギアを用い,ワイヤ放電加工によりアルミを 加工して施して組み上げた.
Table 2 Parameters of robot
長さ[mm] 質量[kg]
胴体
380 1.8
腕
185 0.6
脚
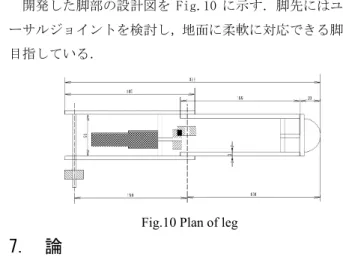
手