1.
は じ め に間隔受け入れ判断(gap acceptance)とはあ る行動を遂行するためにある間隔(時間,空間)
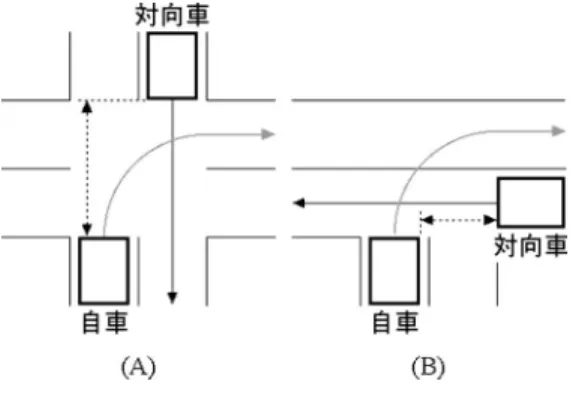
を受け入れることをいう1–5).交差点において右 折する場合,運転者は対向車までの間隔を受け 入れるか否か判断しなければならない(図1).
本研究においては右折時の間隔受け入れ判断に 関する二段階モデルを提案し,派生する問題を 議論する.
2.
対向車の速度の影響モデルの提案に先立ち,その根拠となる実験 を概観する.右折時の間隔受け入れ判断に対向 車の速度が及ぼす影響に関して,鈴木・金子
(2005)はドライビングシミュレータを用い,対 向車の速度に広汎な条件(20120 km/hの6条 件)を設けて検討を行った6).シミュレータは 三管式プロジェクタと大型スクリーン,乗用車 のカットボディからなり,スクリーンに投影し たコンピュータグラフィックスアニメーション
(以下,CG動画とする)をステレオ呈示するた め,液晶シャッタ眼鏡を用いた.CG動画にお いては右折待機場面を模擬し,具体的には被験 者の乗用車が右折待機位置に停車,対向車2台 が同一速度によって走行した.被験者は対向車 の出現から通過までを観察後,実際に運転して いたとすれば対向車2台の間隔において右折す るか(以下,右折実行判断とする),右折しな かったとしても安全を無視して無理をすれば右 折できるか(以下,右折可能判断とする),右
折できるとすればその危険度を判断した.その 結果,(A)右折実行判断,右折可能判断におけ る受け入れ閾値(それよりも間隔が大きければ
[小さければ]受け入れる[受け入れない]と 判断)は対向車の速度の増加に従って時間的に 減少した(図3左上),(B)受け入れ閾値に対 応した危険度は対向車の速度が変化しても大き くは変化せず,対向車の速度の増加に伴う受け 入れ閾値の時間的な減少を運転者のリスクテイ キングに基づいて説明することは困難であった,
(C)安全のために確保した余裕(具体的には受 け入れ閾値における右折実行判断と右折可能判 断との差)は対向車が高速の条件において空間 的に飽和した.
3.
二段階モデル上述の実験結果を説明するため,運転者の判 断に三つの仮定を置いた(図2).仮定1(図2 左):対向車の間隔(以下,Tgap[時間],Sgap
[空間]とする)が十分に大きい場合には空間 のみに基づいて対向車の速度とは無関係に受け
– 255 –
交差点右折時の間隔受け入れ判断に関する二段階モデル
鈴木 雅洋・金子 寛彦
東京工業大学大学院 理工学研究科 附属像情報工学研究施設
〒226–8503 横浜市緑区長津田町4259 R2-60
(VISION Vol. 17, No. 4, 255–258, 2005)
図1 交差点右折時の間隔受け入れ判断.(A)対向 車が前方の場合.(B)対向車が右方の場合.
2005年 夏季大会発表(7月20日)一般講演
入れると判断する(以下,この判断の閾値を Smaxとする).仮定2(図2中左):Sgapが十 分に小さい場合には空間のみに基づいて対向車 の速度とは無関係に受け入れないと判断する
(以下,この判断の閾値をSminとする).仮定3
(図2中右):SgapがSmaxよりも小さくSmin よりも大きい場合には後続車がSminに進入する 時間(以下,Tenterとする)に基づいて受け入 れるか否かを判断する(以下,この判断の閾値 をTminとする).
三つの仮定をまとめると,対向車の速度とは
無関係に判断する第一段階(仮定1,仮定2)
と対向車の速度が作用する第二段階(仮定3)
とからなる二段階モデルを導くことができる
(図2右).なお,現時点においては便宜的に逐 次処理のモデルを提案するが,今後,検討する 必要がある.また,第二段階に関して,時間に 基づく判断か,あるいは空間に基づく判断かを 検討する必要がある.仮定3においては便宜的 に時間に基づく判断(TminとTenterとの比較)
とした.しかし,Tminを空間に変換し(Tmin*V, Vは対向車の速度),Sminと足し合わせて閾値 – 256 –
図2 運転者の判断に関する三つの仮定と二段階モデルの概念図.
図3 第二段階に基づいた受け入れ閾値の解釈,及び直線回帰の結果.
Sturnを定義すると,SturnとSgapとの比較によ り,空間に基づく判断とすることもできる.
二段階モデルには検討を必要とする問題はあ るが,現時点における暫定的なモデルであって も上述の実験結果を説明することができる.ま ず,対向車が高速の条件における安全のための 余裕の空間的な飽和は第一段階に基づいて説明 することができる.つまり,空間のみに基づい て対向車の速度とは無関係に受け入れると判断 した結果,空間的な飽和が生じたといえる.
対向車の速度の増加に伴う受け入れ閾値の時 間的な減少は第二段階に基づいて説明すること ができる.つまり,第二段階に基づくと,受け 入れ閾値(以下,Taccept[時間],Saccept[空間]
とする)はTenterがTminと等しいときのTgap, Sgapと等しくなり(図3左上),
TacceptTgapSmin/VTmin (1)
SacceptSgapSminTmin*V (2)
を導く.式(1)から,TacceptはSmin/Vにより 対向車の速度の増加に従って減少するといえる
(図3左中).
なお,式(2)によると,Sacceptは対向車の速 度の一次関数となる(図3左下).そこで,上 述の実験結果に関して,安全のための余裕が空 間 的 に 飽 和 し た と 見 な し た 右 折 実 行 判 断 の
100120 km/hを除き,対向車の速度の関数と
してのSacceptの直線回帰を行い(図3右),p2
を求めた(表1).p2は右折実行判断,右折可 能判断ともにすべての被験者において0.9以上 と極めて高く,二段階モデルは上述の実験結果 と適合するといえる.
対向車の速度の関数としてのSacceptの直線回
帰からはSmin, Tminを推定することができる(表 1).Sminの推定値は右折実行判断においては
(特にY.N., K.F.において)自車の先頭から交差
点の入口までの空間(6 m)と近かった.右折 可能判断においては(特にH.K., Y.N.において)
右折に必要な前方の空間(乗用車の最小回転半 径やホイールベース,全長の一般的な値[それ ぞれ5 m, 2.6 m, 4.5 m]から概算して2 m強)と 近かった.これらはSminの要因を示唆する結果 として興味深い.右折実行判断においては実際 の運転と同様に安全を考慮した判断を求めたが,
交差点内に対向車が位置すれば安全な右折は困 難である.右折可能判断においては安全を無視 した判断を求めたが,右折に必要な前方の空間 内に対向車が位置すれば無理な右折も困難であ る.
Tminの推定値を実際の交通場面における右折 所要時間7)と比較すると,右折実行判断におい ては右折所要時間の平均値と近く,右折可能判 断においては右折所要時間の最小値と近かった.
右折実行判断のTminは普通に右折した場合の 所要時間と,右折可能判断のTminは急発進,
急加速によって右折した場合の所要時間と密接 に関係しているのかもしれない.今後の検討が 必要である.
4.
派生する問題右折時の事故を防止するために二段階モデル を応用することは本研究の将来的な目標である.
応用するためにはモデルとしての妥当性,信頼 性を高めなければならない.現時点においては 便宜的に逐次処理のモデルを提案しており,第 二段階に関しても便宜的に時間に基づく判断と した.また,SmaxやSmin, Tmin の要因も明らか ではない.これらの問題を検討することが必要 である.
二段階モデルの妥当性,信頼性を高めるため には基礎的な問題,つまり,右折時の間隔受け 入れ判断と密接に関係する運動知覚や空間知覚 に関しても検討する必要がある.二段階モデル においては速度や空間に主観,客観の区別を置 – 257 –
表1 直線回帰のp2,及びSmin,Tminの推定値 判断 被験者 p2 Smin Tmin
H.K. 0.933 14.4 m 2.17 s
右折実行 Y.N. 0.990 5.83 2.34
K.F. 0.998 8.55 2.34 H.K. 0.997 2.85 1.51
右折可能 Y.N. 0.977 3.68 1.52
K.F. 0.998 6.64 1.46
かなかったことから,運動知覚や空間知覚は正 確であることを暗黙のうちに前提としていた.
その上において上述の実験結果を説明すること ができた事実は重要であるが,それとは別に,
前提の妥当性に関しては検討しなければならな いであろう.自動車のように実空間を高速移動 する対象の知覚や交通環境のように広大な三次 元空間の知覚に関しては未解明の部分が多い.
運動知覚に関しては興味深い知見がある.実 際の交通場面を走行する自動車を刺激として到 達時間予測を測定した実験によると,40 km/h 付近を境にして低速の自動車を実際よりも速く,
高速の自動車を実際よりも遅く知覚した1).こ れを根拠に二段階モデルにおける運動知覚の前 提は誤りであると単純にはいえるが,他方,こ の実験結果と二段階モデルとの比較から,到達 時間予測と間隔受け入れ判断とにおいては異 なった速度情報を用いているともいえる.今後 の検討が必要である.
ところで,間隔受け入れ判断は右折のみに限 定した判断ではない.例えば,2本の垂直の棒 を水平に並べ,その間隔に自分の手を通すこと ができるか否かという判断8)は間隔受け入れ判 断である.このように,間隔受け入れ判断は自 己や対象を間隔に通す行動全般に広く関係する.
本研究においては右折時の間隔受け入れ判断に 関するモデルとして二段階モデルを提案したが,
他の間隔受け入れ判断にも適用可能となるよう に発展的に拡張することができるであろう(こ のような作業はSmaxやSmin,Tminの要因を解 明する上でも興味深い).二段階モデルは間隔 受け入れ判断の基礎メカニズムの解明を牽引す る役割を担っている.
5.
お わ り に本研究においては右折時の間隔受け入れ判断 に関する二段階モデルを提案し,派生する問題 を議論した.二段階モデルは対向車の速度とは 無関係に判断する第一段階と対向車の速度の影 響を受ける第二段階とからなる.第一段階にお いてはSgapがSmaxよりも大きい場合には受け
入れると判断し,Sminよりも小さい場合には受 け入れないと判断する.SgapがSmaxよりも小さ くSminよりも大きい,つまり,第一段階におい ては判断することができない場合には第二段階 において判断する.具体的にはTenterがTminよ りも大きい場合には受け入れると判断し,小さ い場合には受け入れないと判断する.派生する 問題に関しては応用に向けての課題と基礎研究 への波及とがあった.今後はこれらの問題を検 討することが重要となる.
追記 本研究はトヨタ自動車株式会社との共 同研究の一環として行いました.また,トヨタ 自動車株式会社の佐々木和也さんから貴重な助 言をいただきました.記して深く感謝いたしま す.
文 献
1)三浦利章:ギャップ・アクセプタンス行動お よびその知覚的要因についての予備的研究.
大阪大学人間科学部紀要,6, 37–77, 1980.
2)長山泰久:人間と交通社会.幻想社,1989.
3)篠原一光:運転における展望的時間評価.交
通科学,24, 53–60, 1996.
4)篠原一光:自動車運転中の時間評価.松田文
子,調枝孝治,甲村和三,神宮英夫,山崎勝 之,平 伸二(編):心理的時間―その深く て広い謎―.北大路書房,303–314, 1996.
5)内山伊知郎:運転者の先急ぎに関する教育に おける問題―松木論文に対するコメント―.
心理学評論,44, 14–18, 2001.
6)鈴木雅洋,金子寛彦:交差点右折時における 運転者のギャップアクセプタンスに接近車の 速度が及ぼす影響―複数車両事態における検 討 ― .電 子 情 報 通 信 学 会 技 術 研 究 報 告, HCS2004-42 HIP2004-87, 2005.
7)J. Wennel and D. F. Cooper: Vehicle and driver effects on junction gap acceptance. Traffic Engineering and Control, 22, 628–632, 1981.
8)羽原啓史,安藤宏志,金子寛彦:身体動作の ための視覚的大きさ判断.電子情報通信学会 技術研究報告,HIP2005-12, 2005.
– 258 –