【論 文
1
日本建 築学 会 構 造 系 論文 報告 集 第 444 号・
1993 年 Z 月Journal of StTuct
、
Constr,
Engng,
AU,
No,
444,
Feb.
,
1993多 層構 造
物
への
可
変
剛 性 型 制 震
シ
ス
テ
ム の
配 置 法
(
層 間連 結 法
)
制震構
造
の研
究
PLACEMENT
OF
ACTIVE
ADJUSTABLE
STIFFNESS
SYS
↑
EM
TO
MULTISTORY
BUILDINGS
(
INTERSTORY
−
HNKAGE
METHOD
)
Active
seismic response contro 玉led
structUres小 堀 鐸
二*,
鎌 形 修
一
* *乃 々
ゆ
KOBORI
andShuichi
KAMA
GA
TA
The
placement of the active controllers (AC
)is
one Qf theimportant
issueS
in
the research of the active seismic response control.
As the placement method of the ActiveAdjustable
Stiffness
system
』
(A2S2
), an inteTstoTy linkage皿ethodis
adopted,
and aninterstory
displacement
(IS
)control and a typical point
displacement
(TP
)co 皿trol aredefined
as the selfbalancing ad巨ptiv白controll
These
control algorithms as well as theplacement
mode and the extent of the adjustable.
stiffness values are thedesign
pa【ametersfor
the A 2S
2,
and we Qbtained the seis珥ic response.
process
by
the numerical analy 前s with thesedesign
para皿eters to show the requir6d performanceproperty
of the‘
A2S2 .
Furthermore
、
we evaluate the seismic respens6proc6
』sby
means of the l nonstationary power spectra.
Also
we proposed the m.
ulti−
point controlfor
th俘T・
P control to re−
duce
the higher vibration mQde.
.
L
KeyWOJxls
:Actitre
Adjustable
Sttffness
systetn,
interstorylinkage
membd,
η π 〃瞬 6α」α触
&,
加跡.
story disPlacement control
, t)
pical
Point
diSpincement control ,honstationar
)t/nonresonantresPonse
.
、
.
可 変 剛 性 型 制 震シ ス
、
テム,
層 間 連 結 法,
層 間変
形 制 御,
特 定 部 位 変 形 制 御,
数 値 解 析, 非定 常・
非共 振1
章 序 論 制 震 構 造の基 本 概 念1} で示 され た非 共 振 化 を 目 指し た 構 造 特 性 調 整 型 制 震 装 置は,
運 動 方 程 式か ら導い た (1) 式 中で示さ れ る構 造 物の伝 達 特 性 (E )を調 整する もの と 考えられ, また その装 置 化において は (2)式に示さ れ るよ うに, 構 造 物の重 量, 減 衰,
剛 性 を可 変 化す る各 種 の メ カニ カ ル な装 置が考え られ る2 )・
3}。
th
=E
{t
)−
LiFs (t
)+F
,(t− d の
+Fc
(t
)1
’
・
……
(1
)E
(t
)−
IM
+餓 (t
)1
+bIC
+C
。(t
)1
+cIK +Kc
(t
}1
…・
……
:1
・
・
……・
・
……・
…・
…
(2)Fs
(t)=−
M雪(t)…・
・
・
・
……・
…・
・
…・
……・
……
(3)F
,(t−dt
>=FRA
(t− dt
)十F
.Kt
− dt
) 十FRP
(t− dt
)・
・
・
・
…
rr…
F・
・
一・
・
一
《4 > FκA(t−
dt)=− G
,詑(t−
dt)・
・
・
・
・
・
・
・
・
…
t・
・
・
・
…
(5 ) FRV(t− d
孟)=− G2
命(t− dt
)t−tt・
t・
・
・
・
・
・
・
・
・
・
・
…
(6 )F
配ρ(彦一d
孟)=−
G3
コじ(君一dt
)・
・
PP…
一・
嚇…
一…
(7)G
,=bic
+CcCt− d
餅+ c 眠+Kc(trdt )}・
……・
…・
・
……・
・
一 …
∴・
・
…
(8>G
,=
lc
+c
、(t一
酬 +αi
κ+k
。(t−
dt
)}・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
:・
・
・
・
・
・
・
・
・
・
・
・
…
(9
)G、
;
IK
+K、(t− dtl
卜・
………・
……
:・
∴…
く10 )’
a=
dt
,
b=
O.
5dt,
c=
0,
25dtZ………一 …一 ・
…・
(11,
12,
13) ま た可 変 減 衰 型や可 変 剛性型 制 震装置は,
(8,
9,
,
10 ) 式の慣性力, 減 衰 力, 復 元 力 を規 定 する係 数で示 され る ように,
振 動 過 程の減 衰,
・
および復 元力エ ネル ギに相 当 する振 動エ ネル ギ を構 造物か ら除去 し,
振 動の成長や継 続 を抑 制 する。 既 に機械工 学 分 野 に おいて は, 車 体の懸 架 装 置の一
部 に可変減衰装 置が実 用 化さ れつ つ あり4)・
5) , 建 築・
土 木 工学 分 野で も, 可変減 衰 装 置 6 )・
ηや 可 変 剛性 装mas
)・
9 ,が 研 究され, 実 際の構 造 物へ 適 用さ れ始 めている。 本論で は,
.
可 変 剛 性 装 置を耐 震 壁や耐 震 筋 違い な’
どに 新た に剛性調 整 機 能を付 与し た もの と して定 義 する。
’ 京舘
大学名誉 教 授・
鹿 島 小 堀 研 究 室・
工博 綿 鹿 島小堀 研 究 室・
工修Emeritus Pref
.
of Kyoto Univ.
,
,、
Kajima Cprp.
, Kobori ResearchComp亅ex
,
Dr.
Eng.
’
Architectural Institute of Japan
Arohiteotural エnstitute of Japan
定義:可 変 剛 性 型 制 震 装置 可変剛性 装置 は
,
メ カニ カル な装 置で,
そ の剛 性 値 (hc
}を制 御 規 範に よ り時 間軸 上で設 定し, 制御対 象構 造 物の剛 性 状 態 を 調 整する.
κ粛 〉=
9(A
,W ,1
,(t−
dt
))…・
一 …・
・
……
(14> A :構 造 物の振 動 特 性,
W :制 御 条 件1
.(t− dt
):制 御 情 報 (構 造 物 ) より静 的な設 計 荷 重に対 抗す る た め, 構 造物の基本骨組 に関 する標 準 化 を可 能にする。
問題 :基 本剛性の設計問 題 静 的な常 時 設 計荷重 (Fp
)に対し,
以 下の設計条件を 満たす 剛性を求め よ。
Xt
<.X ………・
・
…・
………・
・
一 一
一 ・
(18
)X
‘=
f
(K
,
F
,)・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
t−・
・
・
・
・
・
・
・
・
・
…
(19
) この可変剛性 装 置に対す る制 御 規 範と して構 造 物の振 動 情報を制御情報と し た自律型適 応 制 御1°]を導入 す る 。 既 に筆者ら は,
自律 型 適 応制御 を制 御 規 範と し,
多層 構 造 物へ の可変剛性 装置の配 置法13L14]の 研 究を続けて お り, 基 礎 連結型の配 置 形 式と そ の振 動 抑 制 効 果を報 告し て い るIS)。
本 論で は層 間 連 結 法且6,の 配 置 形 式と自律 型 適 応 制 御に属する 2種 類の制 御 規 範を設定し,
これ らの制 御 規 範の違い に加え,
可 変 剛 性装置の配置形 式 お よ び そ の可変剛 性値とい っ た可変剛性型制震 シス テムの設計条 件に関す る各種の パ ラ メー
タ が振 動 抑制効果に与え る影 響を数値解 析的に検討 す る。
2
章 可変剛性型制震 シス テ ム の設 計 問 題 多 層 構造物にお ける可 変 剛 性 装 置の配 置 形 式は,
構 造 物の 層せ ん断 力分布 特性に関与す る支配 的な要 因で あ り, 制 震 構 造の設 計 上 重要な問題であ る。
2.
1 配 置 法 多 層 構 造 物を剛 床 仮 定により多 自由 度せ ん断 型バ ネ・
マ スモ デル で表し,
可変剛性装置に は引 張 力の み を負 担 す る 1対 (2本〉の筋 違 いをX
型 に配置したもの を想 定し1°) , まず 次の配置 法を定義し た 15) 。 定 義 :基 礎 連 結 法 可 変 剛 性 装 置は制 御 対 象 部 位 と 基 礎 部 位 を連 結す る。
こ の基 礎 連 結 法で は,
1自 由 度 系で説 明し た人 体の 自己 平 衡 機 能 を模 擬し た自律 型 適 応 制 御に よ り, 安 定し た 振 動 抑 制 効 果が得られ た。
し か しこ の配 置 法 を実現す る に は,
複 数 階 を跨ぐ大 ブレー
ス構 造 が必要である。
そこで 本 論で は, 次の配 置法を定 義す る。
定 義 :層 間連結法16) 可 変 剛 性 装 置は各 層の柱 頭と柱 脚 部 位 を連 結 する。 問 題:可 変 剛 性 装 置の設 計 多 層 構 造 物の i層 部 位の応 答 (X,)を 設 計 限 界 値 (。cX ) 以 下にす る可 変 剛 性 装 置の必 要 性 能 を 求 め よ。Xi
(t
)〈DcX・
・
t・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
t・
・
t−・
・
・
・
・
・
・
…
(15)Xi
(t)ニh
(A ,
左c(t),
Fs
(t))・
・
・
・
・
・
…
一・
・
一・
・
阜
…
(16)hc
(t
}=
9 (A9
匹弔厂,
1
,(t−
〔lt
)}・
『
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
(17
) 睨 :可 変剛性値,Fs
:地震力,
A
:構 造 物の振 動特 性,W
:制 御 条 件 制 震 構 造では, 制 震 装 置によ り動 的な外 乱に よ る構 造 物へ の影響を設計条件 以下に抑制す る 。 ま た設計 条件は 構 造 物に対す る社 会 的 要 求 (居住性や機 能 性)に応じ た もの で あり,
構 造 物の ライフタイム の中で,
設 計 条 件 を 再 設 定 する必 要が生じ た場 合には,
振 動 抑 制 対 策 と して 導入 さ れて い る制 震シ ス テムを更 新す ることで,
こ の変 化に適 応す る。
現在, 構造物へ の要求性 能の高度 化は新た な構造物の 建 設 を促し てい るが, 同 時に建 設 廃 材に よ る環境汚染も 軽 視で き ない問題であり, こ の ために は要 求 性 能の変 化 に応 じ た構 造 特 性の補 強 対策が必 要であり, こ の面か ら も制 震 構 造の可 能性に着 目し ている。
ま た 制 震 装 置の再 利 用 を 含め た生 産・
流 通シス テムが一
般 化すれ ば, 制 震 シス テム の経済性の問 題 も解決で き る と期待し ている。 可変剛性装置を導入 し た構 造 物は,
基 本骨 組の剛 性に 2,
2 制 御 規 範 制 御 規 範は地 震 応 答 過 程にお け る可変剛 性 装 置の剛 性 状 態を規 定 するもの であり,
既に筆 者ら は予測型適 応制 御1η と自律型適 応制御1 を導入 し,
そ の制震 メカ ニズム を,
前者が 地震 動の卓越成 分から の回 避に よ る, ま た後 者は可変周期特性と吸収エ ネルギ特 性による,
振 動 抑制 である と説 明した14}。
予 測型適応制 御での 地 震 動の予 測 精 度に関し て は克服 すべ き多く の問題 が残さ れて おり
,
本 論で は , 現 在の技 術環境か ら実用 化が容易な自律 型 適 応 制 御 を制 御規 範と して採 用 する。 定 義 :自律 型 適 応 制 御18 ) (1> 零 変 形の状 態を経て剛性は復 帰す る。
剛性 復 帰 :if
(1,(t− dt
)*1
』(t)≦O.
O)Then
Ic=
0……・
………
(20) (2
) 変形 が増 加 を続け る あい だ剛 性 を保 持す る。
(3
>変形 が減 少 を始め た瞬間に剛 性 を解 放す る。
剛性解 放 :if
伍=
o ∩ 1,(t− dt
)* ∬粛 〉≦o.
o>then
Ic=
=
1…………・
……・
・
…・
・
…
(21) (4> 零 変 形に戻るまで剛 性の解 放 を続ける。
ただ しlc:剛 性 状 態 指 数1
, :配 置し た層 間の相 対 変 形 こ こでの剛 性 解 放を規 定す る制御情報と して, 次の2
種一
34
一
類の構 造 物の変 位 応 答を設 定す る。 定 義 :層 間変形制御61 可変剛 性 装 置が配置さ れ た
’
i
層の柱 頭,
柱脚の相対 変 形 を 制御 情 報とする。
1
』(t
)=X
‘(t
)− Xl−
,{t
)・
・
……・
…・
・
…………
(22
) 定 義 :特 定 部 位 変 形 制 御]G ) 制御 対 象と するh
層の柱頭と基 礎 部 位の相 対 変 形を 制 御 情 報と す る。
1,{ t)=
X,( t)−
XD(t)・
…・
……・
・
…・
・
・
………
(23 ) 層 間変形制御は各可変剛 性装置 を個 別 制 御す る分 散 制 御 と な るの に対し, 特 定 部 位 変形制 御は全可変剛性 装置の 剛 性 解放を同時に設定す るこ とで同 調制御と な る。
2.
3
制震メ カニズム 可 変剛 性 装置は 剛 性 を 保 持,
解 放 した2種 類の状 態を 構造物に付与し, その結果, 構造 物の剛 性 状 態 数は各可 変 剛性 装 置の2
種 類の剛 性 状 態の組み合 わせ となる。 !IIL
=
2L・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
tt・
・
・
・
・
・
・
・
…
一
(24)’
L :可 変 剛 性 装 置の導入数 制 御規 範と可 変 剛 性 装 置の基 本 駆動特性に よ り,
この 2五 種類の 固有周期が地 震応 答過程で は構造物の 振 動 状 態に応 じ設 定 さ れ,
構 造 物 はこの可変周期範 囲で の地震 動の周期成分の平 均 的な影響 を受け る。
{(α産∫}: ご=1,…
,
2L),
ノニ1,・一,
ハil・
・
・
・
・
…
一・
・
…
(25) 層 間 変 形 制 御で は構 造 物 全 体とし て の振 動モー
ドにか か わ らず 分 散 制 御され るの に対 し,
特 定 部 位 変 形 制 御で は 構 造 物のh
層に おける 2L種 類の各 振 動 次 数の平 均 振動 モー
ド(φ〔」 りに対する ノ次平均 振 動モー
ドの振 幅 分 担 率 (am(h
))の大 きい部 位 を 制御 対 象 部 位とする。IL φ匸」)
=
Σコφ7
〕/2L・
・
・
・
・
・
・
・
…
一・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
一
(26) ‘=
1 ・u)(h
)=Jcs
{k
)/
Σ16
‘’,(h
)【………・
一 ・
……
(27) ‘=
L 多層構 造 物で は 1次振 動.
モー
ドに お け る構 造 物上層 部で 振 幅 分 担 率がもっ とも大き く なり,
こ の 部 位を制 御対象 部位に し た特定部 位変形制御は簡 略的な1
次振動モー
ド 制御と も考え ら れ る。 この よ うに設定し た特定 部 位 変 形 制 御でに,2
次 以上の振動成 分の固有周期 群と地震動の 周得成分の関係に よっ て は,
高 次振 動が顕著に な る ス ピ ル オー’
バ19}を考 慮し な け ればな ら ない。
地 震 応 答 過 程で の可 変 剛 性 装 置の負 担 力ベ ク トルから も,
’
可変剛 性 装 置の配 置 法が制 震 効 果に与え る影 響を説 明で きる。 基礎 連結法では (28 )式のように剛 性 解 放 時 の影 響は構造物 内の 連結上 端にの み生じるのに対し,
層 間 連結法で は (29
)式のよ う に 剛性解放時の影 響は構造 物 内の連 結 両 端に生じ,
連 結 下 端に生 じ る負担 力は構 造 物に高 次 振 動 を生じ さ せ る原 因とな る。
しか し可 変 剛 性 装 置のエ ネルギ 吸 収 機 能は定 常 振 動の継 続を抑 制する た め,
こ の高 次 振 動は増 幅しな い。
Fc=
Fc
.
NFqN−
1 q qFF,
Fc=
FqNFc1N
−
i−
Fc,
N ご ごFF
「
[
鎚 釦FF
・
・
(28,
29) また制御規範が制震 効 果へ 与え る影 響は次の よ うに考 え ら れ る。
層 間変形制御では 剛性 解 放 時 期が分 散さ れ,
前 述の高 次振 動が生じ る 可 能性が高く な る。
そこで,
多 層 構造物で は 1次 振 動モー
ドが支配的で あ り, その 振 動 モー
ドで大き な振 幅 とな る構 造 物 上部を制御対象に し た 特 定 部 位 変形制 御で は,
すぺ て の可 変 剛 性装置 を同 時に 剛性 解放す る と,
上 下 層で負担 力が相殺さ れ る分だ け,
高 次 振 動 が励 起さ れ る可能性は小さ く な る。3
章 数値解 析に よ る設 計パ ラメー
タ の評価 構 造 物に制 震システムを 導 入 する にあたっ て は,
まず 制 震 装 置の必 要 性 能を評 価する必 要がある。
そ こ で筆 者 らは,
数値 解 析シ ミュ レー
タ1】)・
12)を用い た各 種の検 討 を 行っ てお り,
構造物を1自由度モ デル と し,
制 震 装 置の 性 能をパ ラメー
タに し た解析 結果か ら応答ス ペク トル と 性 能ス ペ ク トル を求め,
制 震構造の地 震 動に対 す る振 動 特 性と制 震 装 置の必 要 性 能 を 示し ている10)・
17).
本 論では多層 構 造 物 を制 御 対 象 とし,
制 御 規 範,
可変 剛性 装 置の配 置 形 式,
可 変 剛 性 値の違い が, 振 動抑制に 与え る影 響 を評 価 し, 振 動観測器 と可変剛性装置の配 置 位 置 と必 要 性 能 を検 討す る。
3,
1 多 自由 度 系DIB
数 値解析シ ミュ レー
タ 多層 構 造物をせ ん断 型 ばね・
マ スモ デル で表 し, 制 震 構 造 物の地 震 応 答 過 程 を数 値 解 析によ り求め る。
(a ) 動 的 釣 合い式 地 震 時の運 動 方 程 式 を (30}式のように記 述 する。
こ の式で示さ れ る よ う に,
可変剛 性装置が構 造 物へ 付 与 す る復 元 力 (負 担 力 )はカベ ク トル (E
∂で評 価す る。MX
+C
±+Kx
+F
。(x)=− M
診…・
…………
(30 )M
:質 量 行 列C
:減 衰 行 列 [=
(Tlh
/rr)K] κ :剛 性 彳于列T
,:1次 固 有 振 動 周 期h
:減 衰 定 数 記 :加 速度応 答ベ ク トル 毒;速 度 応 答ベ ク ト.
ル x :変位 応 答ベ ク トル す:地 動 加 速 度ベ ク トル こ の地 震 応 答 過 程を,
時 間 区 分 (dt
)で離 散 化し,
台 形 則を用い step−by−
step の数 値 積 分に より求め る。
th
(t}=
・E
−
]iFs
(t)+F
粛一dt
)+Fc
(t)1
’
…・
…
(31)Architectural Institute of Japan
Arohiteotural エnstitute of Japan
Fs
(t)=− Mtr
(t
) :地 震 カ……
(32) E=
ハf十bC
十 cκ…・
…・
……・
…・
……・
……・
(33)F
配(君一dt
)=
F,,(t−
dの十F,Kt
−
d置) 十F
,.(t−
dt
}・
t−・
・
・
・
・
・
…
一
一
・
…
一・
・
(34 )FRA
(t−
(it
)=− G
、X
(t− dt
) :慣 性 カ……
(35
) F献ε一dt
)=− G2
叙卜d
の :減 衰 カ……
(36)FnD
(t−−dt
)=− Gsx
(t− dt
) :復元カ……
(37 )G
[;bC
十cK,
G
,=
=
C
十aK,
G
,=
κ・
−t・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
(38,
39,
40) α=dt,
b
; O.
5dt.
c= 0.
25dt2・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
(41,
42,
43 ) 廊(t}=dr
(t− dt
)十bIX
(t− dt
)十 幽う(t)卜一
一
・
・
…
(44 ) x(t)=
x(t− dt
)十αb
(t− dt
) 十clX (t− dt
)十」ピ(彦)1
・
・
・
・
・
…
−s・
・
・
・
・
・
・
…
(45 ) 各可変剛 性 装 置の負担 力は,
制 御 規 範の中で設 定さ れ る 剛性 状態指 標 〔左」)に基づ き算 定す る。if
〔lqJ=
0)then
FqJ
(t)ニhc,
JXqJ (t)………・
(46)if
(lqJ=1
)then
Fc.
J(t〕=0.
0 ……・
…・
・
…・
…
(47 ) LF
粛 )= ΣFqJ
(t
) :制震 カ……
(48) Jsl L :制 震 装 置の導入個 数 (b
) 数 値 解 析 条件 応 答 過 程での 可変剛 性 装 置の剛性 変 化は収 束 計 算で求 め る。 各 解 析 step で収 束評 価値 (Vc
)が,
収 束判定 値 (Vp
)以 下になるまで (31 )〜
(48 )式の計算を繰り返す。
N NU
・一 ΣIX
・.
・− X
・,
、一
、1
/
Σ1X
・,
、1
…………・
…
(49 ) J=
1 丿=
1i
:収束 計算回数Vc
≦1
門P・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
(50
) こ の数 値 解 析シ ミュ レー
タにおいては,
可 変 剛 性 装 置 の剛性切替え は解析刻み時 間 内で行わ れる とし て お り,
解析刻み時間を設定す るこ と は装 置の応 答 性 能を仮 定 す ることに な る。
本 論では収 束 計 算の精 度・
効 率も考 慮し,
解析 刻み を0.
005秒,
収 束 判 定 値 を0.
00001と す る。
(c ) 可 変 剛 性 装 置の吸 収エ ネルギ 量 各可変剛 性 装 置ご とに吸 収エ ネルギ 量 を算 定 する。
E
・,
J−
J
(
” … (・)・・.
・(・)・・……・・
一 ・
・
……
(51
)J =1,…,L
L
:可 変剛 性装置の導入個数 3.
2 数 値解析モ デル3
層搆造物を制 御対 象とし,3
自由度せ ん断型 ばね・
マ ス モ デル で表し, 各 層の重 量 を1.Otonf,
せ ん断 剛性 を1.
O tonf/cm と し,
1.
0%の内 部 減 衰を仮 定する。
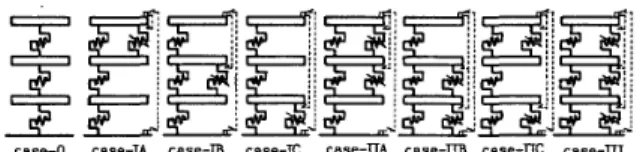
(a 》配 置 形 式 まず 同じ可 変 剛 性 値の可 変 剛 性 装 置を,
層 間 連 結 法に 基づ き 各 層に 1機 ずつ 配置す る (Fig.
1)。
これ らの配置形 式は,設置数 (case
−
1,
ll,
皿)と設 置 位 置 (case−A ,
一
36
一
里
i
靉 靉
騒
i
c
章
6←
0こ
且
3e−
R cese−
IB⊂
age一
皿 ceSe−
m仁
aヨ
R一
皿Den5e
−
nC ca5e一
皿 Fig.
1 Placement of A 2 S 2 (lnterstory Linkage Method} B,
C>の組み合わせ で表す 。 次に 6機の 可変剛 性 装 置を,
Fig.
2
に示し た よ うに,
各層2
機ずつ 配 置 し た一
様配 置 (case−U
)と,
下層ほ ど可変剛性 装置 を多く 配 置 し た 比例配 置 (case−T
)を 設 定する。
鑼
纛
case−
Ut皿 ca8e一
野皿Fig
.
2 Stiffness Profile(Uniform and Trapezoidal Placement)(
b
) 可 変 剛 性 値 可 変 剛 性装置の可 変 剛 性 値は,
0,
25,
0.
5,
1.
O tonf/ cm の 3種 類 (S,
M,
H)とす る。一
様 配 置で の case−
U
/皿/S,
M,
H
の可変剛 性 値は,
各々,
基 本 剛 性 値のO.
5,
1.
0, 2.
0
倍と な る。
(c )制御規範 層 間変形 (IS )制御と特定部 位変 形 (TP
}制御に加 えて,
特 定 部 位 変 形 制 御で の制 御 対 象部 位の設定方法か ら, 単 点 (SP
)制 御と多 点 (MP
)制 御 を 設定す る。
3.
3
固有値 解 析 可変 剛性 装置を導入 し た構 造物は,
装置の剛性設 定に 応 じ た 振 動特 性を もつ が,
可変剛性 値を1.
0
tonf/cm と し た7
種類の配 置 形式で各装置の剛 性を保 持し た状 態でTable l Natural Periods
α
ase−
U cas已一
T 1st.
2n‘.
3rd.
1st.
2nd.
3rd.
o0.
4510.
1610,
lllo.
451O.
1510、
且1L 1AIB0.
443o、
匪47 0,
4460,
152 0,
424o.
1580.
149o.
1咀 o.
0980.
4240.
158D,
1060,
0980.
】05 case−
Slco.
409 0.
108o.
3970.
145旺A0
.
4160.
140D.
0920.
419o.
147D.
D96皿B0
.
3了8o.
149D.
096o.
3550.
1450.
094亘c0
.
ag90.
1350.
100o.
agl0.
1ヨ60.
ID3日 0
、
a680.
131o.
α91o.
a5呂 o.
B4o.
092 0o.
451D.
1610.
11且 o.
4510.
16且 0.
lll iA 田 0.
43904110、
1420.
157o.
0920.
0890.
1040.
4430.
41蓋 o.
1470.
旦5丁 0.
1010.
0890.
099case
一
圏 IC0.
3B8o.
142 o.
蹄50、
137 肌 1B0,
茜990.
3310.
1260,
1420,
0810.
4030.
137O.
085 0,
0840.
3220.
1370.
082 ICo.
972D.
1200.
091o.
364o.
1200.
096国 0
.
3190,
11春 o.
0790.
308D.
1200、
080 o0.
4510.
1610.
111 口.
45旦 0.
1610.
1H 1Al61Co.
4a60、
3980.
366o、
1380.
1560.
134o.
07ε 0.
0750.
4390.
3980.
1420.
15B0.
0920.
075case
−
H 0.
095o.
356D、
1310.
OE7 M σ、
381o.
lo7 0、
3S50.
120 囗B 珪Co.
2910.
】320.
0660.
0700,
278 0.
0710.
06丁 0.
OB4 0.
3440.
102o.
o胃 D.
33了 0.
工250.
10D 鬮 D.
2δo0.
0駐30.
D640.
2510.
100 口.
066case
−
−
Scase Mcase−
H 羅 :咼
,
case−−
H Frequency 5。
O lO.
0 15,
0Table 2 Analytical Cases
−
v−
TFig
.
3 Extent of Adjustable Stiffness Ra皿geP
!lP12P /3P14P15
制御規範 可変剛性僮IS,
TPPlPPDl
TTTT
HMMMMM
S,
配置形式 皿』
皿 IC,llB,皿 皿 皿 可変剛性配置 制御対象部位T
UUU
,
TU
SP
SP SPSPSP
,
MP の固有 振 動 周 期を求め る (Table
1,
Fig.
3
)。.
(a )同 数の装 置 を導入 し た case−A ,
B .
C
の 中で,1
次 振 動 周 期を最 短にする配 置は,
case−
1で は case−
IC,
case−ll
では case−
llB
で あ り,
下層部 位に配 置す る ほ ど 制 御 状態での 1次 振 動の可変周 期 範 囲は広く な る。 (b
) ま た,
1層 部 位に装 置を多く配 置した 比例配置は,
一
様 配 置に比べ 1次 振 動の最短 周 期が短く,
制 御状態で の 1次振動の可変 周 期 範囲 が広く な る。 (c ) case一
皿での可 変 周 期 範囲 は, 可変剛性 値が大き い ほ ど広く な り,
case−H
で は2
次 と3’
次 振 動の可変周 期 範 囲が 連続した もの と な る。
(d
) 3層 部位の 1次 振 動モー
ドの振 幅 分 担率は,
一
様,
比 例 配 置と も81% であ り;2
層 部 位では一
様 配 置で 77 %,
比 例配 置で は 69%,
1層 部 位では一
様 配 置で52
%, 比例配 置で は 45 % と な り,
比 例 配 置に比べ,
一
様 配 置 は 全 層に お い て 1次 振 動モー
ドの振 幅 分 担 率が高い。
3.
4 地 震 応 答 解 析制 御 規 範と可 変 剛 性 装 置に関して
,
前 述し た5種 類の 設 計パ ラ メー
タ を適 宜 組み合わ せ た解 析ケー
ス (P/l−
P
/5)を設定
する (Table
2
)。
400 s785.
Q4.
D3、
q2.
01.
D匸
m
/see2・
…
…・
・
r
r
−1.
.
.
.
.
.
.
.
.
.
.
.
.
.
”
齟
’
1.
3 1 1.
囲 。・
乃1≦ P・
〈 L°.
亅.
…−….
’
』
…
丁齟
’
』
−
−’
T’
.
’
「’
『
『
.
.
.
.
罷蕁.
0、
」:
≦’
馬く 0.
75 :,
匚
:
:
:
}0.
25≦ 馬く
05 1L
『
1.
』り
1.
.
”
マ1
.
.
.
.
.
.
_
鵡.
・一
圏
・
一
.
i.
.
コ
鯵
…
:
:
:
コ
:
二
1
二
1
∬
薫
…
1
層
em /eec2100 、.
: z5.
oG.
e3、
02.
Ol.
0 5.
D 10,
0 L5.
O DUTe匕
ion匚
i皿
已
ElG
臼
ロ
匸
ro(NS ) 10.
ov
「
.
卩
一
閲
”
…
開
1
’
・y
・… ’
四
†
’
−”
『
谿 灘
豊
蠍
”
i價
・
r
脚
転
再一
転
・
一
げ序
・
一 ・
一
醤
.
;脚
….
_.
.
.
_
t
.
轟磁
毳、.
ユ、
.
_
上
.
_ .
_
副・
「
『
柁.、
,.
:ジ’
「鷲 }’
・
「
.
….
.
.
.
.
…
亨湾
’
丱
…
甥6
幽
’
’
”
ド
、
{ 5
.
0 10.
O l5.
0 馳ra じiOn しi閉
o Tafヒ〔ew) 20.
0 Fig.
4 Nonstationary Power Specta of Earthquake Rebords解 析に用い る 入力地 震動は
,
エ ル セン トロ1940NS
と タフ ト1952EW の 地 震 動 記 録の 20.
O秒 間 とし,
最 大加 速度を100
cm /sec2 に設定する。
こ れ らの地 震 動 記 録の非定常
パ ワー
ス ペ ク トル を示す (Fig.
4)。
3.
4.
1 制 御 規 範に よ る比 較 (P
/1) 全層 に一
様 配 置した case−U
/皿/M に おい て IS 制 御 と3
層部 位を 制 御 対 象 とし たTP 制 御で の制 御 規 範の 違い によ る振 動 抑 制 効 果へ の影 響を検 討す る (Fig.
5)。 (a ) 最 大 応 答 値 (Fig.
6>いずれ の地 震 動に対し ても, TP 制 御 (図 中 実 線
)
は,IS
制 御 (図中 破 線)に比べ , すべ て の最 大 応 答 値 を 小 さ く し,
特に加 速 度 応 答に関 し て は,TP
制 御はIS
制 御に 比べ低 減 効 果 が顕 著である。 エ ル セン トロ波で は TP 制 御は,
IS制 御に比べ,
最 大 応 答 値を低 減す るばか り か,
可変剛性装 置の 吸収エ ネ ル ギ量 を小さ くし,
ま た タフ ト波で は吸収エネル ギ 量 は 制 御 規 範の違いに さ ほ ど影響を受け ないが, 応 答 低 減の 違いか ら,
や は りTP
制 御での振 動 抑 制 効 果が高い。
吸 収エ ネルギ総量は, タ,
フ ト波で.
はエ ル セ ン トロ波の 2倍 程 度と な る が,
最 大 応答値はいずれの地 震 動でも同.
程 度とな る。 これ ら は 地震 動の不確 定さに対 抗する制 震 構 造の可 能性 を示 す もの であ る。 (b
) 加 速 度 応 答 時 刻 歴の非 定常特性 (Fig.
7 ) 各 制 御 規 範で の剛 性 設 定状 態を把握す る た め に,
加 速1
」
IS control
靉
TP con しrolFig
.
5
Analytical Model for Comparion of Centrol Algorithmsii
臨
ii
欧
ii
匿
ii
医
iii
_ 5囎 ZD し
.
o o.
4 0.
5 1cceleretlo皿
Ve10G 且:y eSspla匸
anep
匚
Int巳
【
s匚
ory 肚 8P.
ibserbed aner8y む Cenし
rり
(HS )ii
嘉
ii
匿
ii
必
ii
L
も
。
匆0 2D 1
.
O O、
昌 1.
O Accel巳
「
昼
し1叩
Velec1匸
y D±splece国
翩
匸
lnlereにoryMsp
・
AbSOTbedE
ロ
e「
gy I&
正ヒ
(踟)
ロ
エscpnLro し
TP
control
Fig
.
6 Comparison of Maximum Respoロse Profile(case
−
IS and case−
TP)Architectural Institute of Japan
Arohiteotural エnstitute of Japan
:
]
二:
:
lrl
:
璽 鞨 ユ
ニ『
蠶
1
寇
:二
τ着
慧輩蕊
:
、一
ご ::IT
:.
T
」i
.
」一
二享
:旧
」覧1 .
.
胛
岸
竺 二Pt
L
F}
1.
−t
の
’
.
詈.
1
柵
b
H
嚔
コ
汗
テ
{
ユ
腰
コ
F {TcrF, z「
〔
皿
P}
IP 【T[
P ,Is
tdntrel
継
H
隔
一
H
”
網
塵
;
1
一
葺 蔵 鬚
コ
F 匸丁
ロ
r ) 2 別丁
OP}
1F (P , 琶圏綴聒 } ・
饕 野
「
≡
篝
饕
箋
’
一
.
榊 黼一
.
1跚1
隔
酬芭
蒙嚢裂
ll
三
輦
l
IFC
し IFcne
]
lec しし
ヨ
e“
tLtbl細
覲.
細
緲下袖
酬・
ll
毒罫
預
ユ
≒
i
嗤
SF
{
rOPl IFI 「ep) Isc「
v }写
。
篩 ILFig
.
7 Nonstationary PrQperty of AcceleratiorL Response(case
−
Linear,
IS and oase−
TP)度 応 答 時 刻歴 を非定常パ ワ
ー
ス ペ ク トル により分 析す る。
可 変 剛性 装 置の剛性 を保 持さ せ た線形系では全 層の応 答 時 刻 歴におい て継 続 時間軸 上の2.0
秒か ら10.
O
秒に 3.
1 Hzの 1次振 動だ けが卓越する。 これに 対 しIS
制 御で は3
層,2
層 部位で2.
0〜3.
O
Hz
の周波 数 帯 域に卓 越 成分 が あ り,
これ ら は 地震 動の 車 越 成 分 (Fig.
4)に対応 してい る。 そ して 1層 部 位で は1
次振動に加え,ZO 〜12Hz
の周波 数帯域で の2
次,
3次 振 動の比率も 大 き く なる。
一
方,TP
制 御で も 3層, 2層部位で 2.
O− 3.
O
Hz
の 周 波 数 帯 域に 1次 振 動 が,
また1層 部 位で は7.
O− 9.
O
Hz
の2
次 振動 も卓越 するが,
3次振 動は顕 著で な い。
こ の よ うにIS
制 御 に比べ,
TP 制 御は高 次 振 動の抑 制 効 果 が高く, この振 動抑制効果はい ずれの地 震 動にお い て も共 通している。
3.
4.
2 可 変 剛 性 値による比 較 (P
/2) 可 変 剛 性 装 置にお け る可 変 剛性値の大き さ が振動抑制 効 果に与え る影 響 を検 討す る た め に,一
様配 置で全 層に 可 変 剛 性 装 置 を 導入 し た case−U
/皿/S,
M ,
H
で の振 動 抑 制 効果 を比較す る (Fig.
8
)。 (a ) 最 大 応 答 値 (Fig.9
) いずれの地 震 動におい て も,
可 変 剛 性 値を大き く し て も, 加 速 度 応答は必 ずし も低 減し ないが,
速度,
変位 応 答は低 減する。
一
38
一
Il
磐2 11コ
し
t
隷
1
’
lli
葦
i
…
1
萋
l
case
−
or皿 S ca5巳一
WI[YM case−
uxnVHFig
.
8 AnalyticalModel
for
Comparion
ofStiffness
Value(case
−S,
M,
and H)ii
[
ん
ii
匿
i
匠
{
』
ii
耄
_ 500 20 LO O4 0
,
51cceleTntton VeXo
[
ity 肚叩
la[
皀aen 匸工nLe :sしOtyO↓sp
,
ihse
【
bedEmc
[
gr阯鴕
四
匸
ro
【ms)iiLL
;
i
差
ii
匠
ii
胝
;
ii
…
. 櫛 2Q 且
.
n o.
ム
1.
O SeEelor旦
u±
on
Veユ工
匸
y )isplecuae”
t工ntoretoryM
ε
P AbelOTbedEAetgy Tbft〔駲 〕
−
cese−
WD 岫一
一
一
cese脚
VllLts.
・
・
C眄
e一
Ψ皿!SFig
.
9 Comparison of Maximum Response Prefiie(case
−
S, M,
and H)囲
細
』
細
悪
劃
穩
騨
儷二
SF
[
Top]
1nyMP)
11 (laド
)細
隔
丁
細
H
嘱
藷『
但
コ
ヨ
憾
耳
l
IT (エ l
「
こり IF (rCP
)
eE−−
細
絶
隔
陣 州鞋
轟
罵
「
「
耳耳
ヨ
レ
ユ−
de / 3F【剛 iε傭〕 ユFtWP,
mtUzrocms )隔
州隔
i
悔
軸 ・i
ヨ
聲
忙
芋
泪
葬
;eエmp) l「
[
nVT]
F (TP)”
e−
H隔
榊 州“
師
紳 州糧
締Il
「
響
r
思
身
王
ユ
薫
ヨ
IF エmp IFCTMP] LF エTOP ロに
細
晦
1
細
・硬
1
旺
軒
帯 蕁
v (闘 器卿±
「
慨
〕 hf匸
く助Fig
.
10 Nonstationaiy Property of Acceleration Response(case
−
S,
M,
and H)case
−U
/田/H
で は,
い ずれ の地 震 動で も 同 程度の応答とな り, 層 間 変 位 応 答は全 層で
0。
30cm
以 下であり,
階 高 を300cm に想 定 すると 層 間 変 形 角は
1
〆1000
以 下可 変剛 性 値が大き い ほど
,
「
装 置の吸 収エ ネル ギ 性 能 が 高い に もか か わ らず,
2層,
1層 部位で は可変剛 性値が 大 きい ほ ど吸 収エ ネルギ総量 は小さい。
case−S
に対す る case−
H の 吸 収エ ネル ギ総量の比は,
エル セ ン トロ波 で は86 %,
タフ ト波で は 75%で い ずれ も小さ く な る。
ま た,
タフ ト波での吸収エ ネルギ量は,
エ ル セン トロ波 の 2倍 程 度と な る が,
これ ら はエルセン トロ波に比べ , タフ ト波の卓 越 成 分の帯 域幅が狭く, かつ継 続 時 間が長 い こと と対 応 して いる (Fig.
4
)。
(b ) 加速度応答時 刻 歴の非 定 常特性 (Fig.
lo} 可変剛性値が大きい ほど最大パ ワー
値は小さ く, また 卓越 周波数帯域は広く な る。
また タフ ト波に比べ エ ル セ ン トロ波で は卓 越周波 数 帯 域が広い。
こ れ ら の結 果か ら 可 変 剛 性 値が大き い ほ ど構 造 物の共 振,
定 常振 動 を抑制 する と考え ら れ る。 3.
4.
3 設置 個 数の比 較 (P
/3) 可変剛性 装置の導入数の違いが振 動 抑 制 効 果へ 与え る 影響を分析す る。
TP 制 御は 1次 振 動の抑 制 を 目 指して お り,
そのた めに は 1次 振 動の可 変 周 期 範 囲を広く す る こ とが有 効と考え ら れ る。
そ こ で固有値解析の結果を も と に,1
層 部 位か ら順に可 変 剛 性 装 置 を 増 設 したcase−
IC,
且B ,
田での振 動 抑 制 効 果 を 比 較 する (Fig.
11
)。 〔a) 最大 応 答 値 (Fig,
12) case−
1C
では case−
[B,
皿 に比べ 最 大 応 答 値が大き く,
地 震 動に よる最 大 応 答 値の 違い も 顕著で あ る。 case−
llB
で は 1層 部 位で の加 速度応答が大き く な る が,
2層, 3層 部 位の速 度,
変 位 応 答は抑 制さ れ, 地 震 動 に よる最 大 応 答 値め違い も小さ くなる。
case−M
で は特 定 の層 部 位で顕著に応 答が大き く な らず, い ずれ の地 震 動 で も同 程 度の応答となる。
ま た可変剛 性 装 置の吸収エ ネルギ量は下 層 部 位ほど大 case−
ICFig
.
11 Analytical Models for Placement of A 2 S 2(case
−
IC,
U B,
and 田)葭
i
Iicase
一
口B 翼i
i
…
琴icase
一
監
i
繧
i
幽
ii
鴎
ii
臨
i
嵐
AeceLeraL
丘
Veloc±t ] Mgple
:
emen し 1冂
匸
巴
r8【
Dry Dtsp齟
AbSOrbed 』e【
9「
mCenし
rP (HS )ii
鉱
ii
巳:
i
蹼
階 Acccl
巳
reに
匸
o”
VEID匚
t匚
y 口1spleccmcnし
1凡
tetgcors Dlep、
ihsロ
rbtd
En陸
r8y Ta[し
(齪 ,
.
.
cese−
rc一匸
aso“
−B−
ceee一
皿Fig
,
12 Comparison of Maximum Response Profile(case
−
IC,
ll B,
and 皿) き く,
1層部 位で は最 小の case−
llBと最 大の case−
Mで の違いは 30% 程 度である。 (b
)加 速 度 応 答 時 刻 歴の非 定 常 特 性 (Fig.
13
> 可 変 剛性 装 置の導入数が多い ほ ど,
最大パ ワー
値は小 さ い。
case一
田 におい て は3層,2
層 部 位で1
次振 動 が,
1
層 部 位で ユ次,
2次 振 動が卓越し てい る。 case−llB
に おい て は 3層 部 位で 1次,
2 次振動が,2
層部 位で3
次 振 動が, 1層 部 位で 2次,
3次 振 動 が 卓 越 して い る。
ま たcase−
IC に おいで は 3層,2
層 部位で1
次,2
次振 動が,
1層 部 位で 2次振動が卓越して いる。
嚠
酬
「
tW
lrWPt
+1
・:
∫
網
圧
夛
r
「
・三幽
.
SF (ron s5PR LF[TbP)’
FtWN
−−
H
細
’
Ftw
−
be− 一
一
ff蔵逕
.
1
:
藝
!
目
:
匡貨ユ
IFエrOP) !FtTMH IT (TDP )t“
t.
tre’
Fpa
− 一
一
{細
圏
細
穩
繧
華
匡
蹠
肝 葬
ヨ
L −.
3F{Toe) 7FCTee) IEcnp )
c“
t.
m elCtfitPtsfSiS]
丁
細
1
琳
{’
F
:L
.,,,… .・{ ・1
学 轡
:
一
鬮
澗
轜
SF【TOPI 出 濺 ]P {TOP}一
“
ne
’
圏
1
:
:
一
欝
華
b
二
二
薯
羽
・:
:
璃
コ
蕈
u
−
P ボド
顎葦
薊
.
匸
L
− −
IFfTbP} :EtMPコ IF[Tew]
[
e#
e.
M隔
甅
細
「廟
糠
鸞
獲 費
匚
『
1FTMP ) tHTO
「
p } 1F [tOP 〕匸
eStrM
Tρ
EL〔
駆
)Fig
.
13 Nohstationary Property ef Acceleratien Response (case−
IC,
皿B,
and 田)3.
4.
4 可 変 剛性 分 布に よ る比 較 (P
/4 )各層に 2機 ずつ 配 置し た case
−
U/皿/M
と,
3層に 1 機,2
層に 2機, 1層に 3機 配 置 し た caserTIMIM は い ずれ も6機の可 変 剛 性 装 置を構 造 物に配 置し た もの で あり, これ ら の配 置 形 式で の応答の比較に よ り,
可変剛 性 分 布の 違い が振動抑制へ 与え る影 響を検 討す る (Fig.14
)。
,
↑ cage−
U/皿蠶
““ “
j
case_
VmFig
.
14 Analyticai Models for StiffnessProfile
〔case