第 6 章 はりの複雑な問題
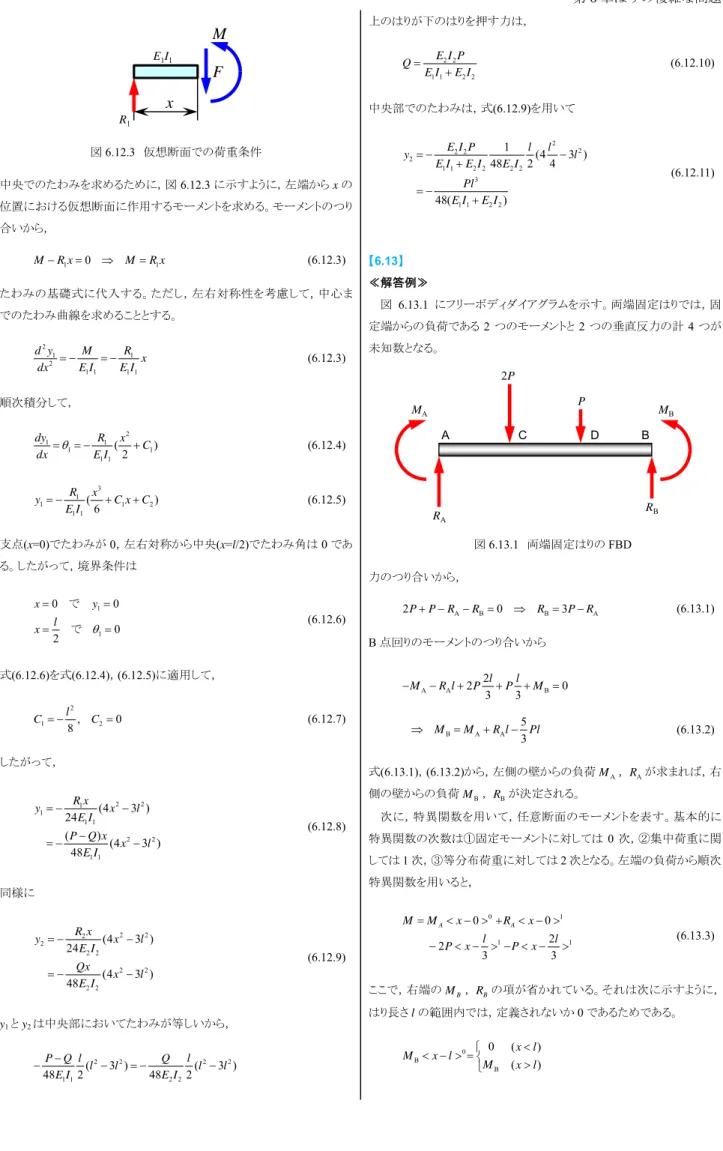
【6.1】
≪解答例≫
重ね合わせ法を用いることが指定であるので,図6.1.1に示すように,固 定端からxの点の仮想断面までの片持ちはりを考える。仮想断面には せん断力FとモーメントMが生じる。したがって,重ね合わせ法により xの点のたわみを求めるには,長さxの片持ちはりに,①モーメントM ,
②集中荷重F,③等分布荷重qがそれぞれ働く時のたわみを求め,
重ね合わせればよい。
図6.1.1 仮想断面に働く力
元の等分布荷重を受ける片持ちはりのフリーボディダイアグラムは図 6.1.2となる。
図6.1.2 等分布荷重を受ける片持ちはり
図6.1.2から,固定端Aでの反力RAとモーメントMAを求める。力のつ
り合いから,
A 0 A
R ql R ql (6.1.1)
A点回りのモーメントのつり合いから
2 2
A 0 A
2 2
ql ql
M M
(6.1.2)
次に固定端からxの点の仮想断面に働くせん断力FとモーメントM を求める。図6.1.3は左端から仮想断面までの部分のFBDである。
図6.1.3 仮想断面を含む部分のFBD
力のつり合いから
A 0 A ( )
R qx F FR qxq lx (6.1.3)
C点回りのモーメントのつり合いから
2
0 0
2
A
MM R xqx 上式を解いて,
2 0
2 2
2
2
2 2
( )
2
A
M M R x qx
ql qx
qlx q l x
(6.1.4)
以上から,教科書p.97の表6.1の結果を用いると
①モーメントMによるたわみM
2 ( )2 2
2 4
M
Mx q l x x
EI EI
(6.1.5)
②集中荷重FによるたわみF
3 ( ) 3
3 3
F
Fx q l x x
EI EI
(6.1.6)
③等分布荷重qによるたわみq
4
8
q
qx
EI (6.1.7)
式(6.1.5),(6.1.6),(6.1.7)を重ね合わせると
2 2 3 4
2
2 3 4
( ) ( )
4 3 8
( 1 )
4 6 24
M F q
q l x x q l x x qx
EI EI EI
q l l
x x x
EI
(6.1.8)
≪別解≫
仮想断面のせん断力FとモーメントMは,図 6.1.4 のように仮想断面 の右側のはりの部分から求めることもできる(この方が楽)。
図6.1.4 仮想断面の左の部分
力のつり合いから
( ) 0 ( )
Fq lx Fq lx (6.1.3’)
仮想断面回りのモーメントのつり合いから q
M A
F C x
q
RA MA
A B
MA q
M
A
F C x
RA
M F
l-x q
C B
2 2
( ) ( )
2 0 2
q l x q l x
M M
(6.1.4’)
【6.2】
≪解答例≫
図6.2.1に示すように,本問題は①はりの上方から全長に渡る下向きの
等分布荷重qと②はりの下方から長さaだけ上向きの等分布荷重qが かかる問題の重ねあわせと考えることができる。
図6.2.1 上下から等分布荷重が負荷された片持ちはり
教科書p.97の表6.1から①,②の場合の自由端のたわみとたわみ角を 求める。添え字1,2で①,②の場合に対応させる。
①の場合
3 1
( )
6 q a b
EI (6.2.1)
4 1
( )
8 q a b
EI (6.2.2)
②の場合
自由端のたわみは,B点のたわみにB点から自由端までの長さbに対 して直線的に変化する分を加える。
3
2 6
qa
EI (6.2.3)
4 4 3
2 8 2 8 6
qa qa qa b
EI b EI EI
(6.2.4)
式(6.2.1)~(6.2.4)を重ね合わせることにより,
1 2
3 3
2 2
( )
6 6
(3 3 )
6 q a b qa
EI EI
qb a ab b EI
(6.2.5)
1 2
4 4 3
3 2 2 3
( )
8 8 6
( 18 12 3 )
24 q a b qa qa b
EI EI EI
qb a a b ab b
EI
(6.2.6)
≪別解≫
本問題を,特異関数法で解いてみる。フリーボディダイアグラムは図 6.2.2となる。
図6.2.2 全体のフリーボディダイアグラム
力のつり合いから,
A 0 A
R qb R qb (6.2.7)
A点回りのモーメントのつり合いから
A ( ) 0 A ( )
2 2
b b
M qb a M qb a
(6.2.8)
特異関数を用いて,xの位置の仮想断面に生じるモーメントMを表す と,
0 1 2
0 0
2
A A
MM x R x q x a (6.2.9)
たわみの基礎式に代入すると,
2 2
0 1
2
1{ 0 0
}
2
A A
d y M
dx EI
M x R x
EI q x a
(6.2.9)
順次積分して
1 2
3 1
1{ 0 0
2
}
6
A A
dy dx
M x R x
EI
q x a C
(6.2.10)
2 3
4
1 2
1{ 0 0
2 6
}
24
A A
M R
y x x
EI
q x a C x C
(6.2.11)
境界条件は,
0 0
0 0
x
x y
で
で (6.2.12)
境界条件,式(6.2.12)を式(6.2.10),(6.2.11)に適用して,
1 0, 2 0
C C (6.2.13)
したがって,たわみ角とたわみの式は,
1 2 3
1{ 0 0 }
2 6
A A
R q
M x x x a
EI (6.2.14) q
q
a b
B
q
b B
RA MA
C A
a
2 3 4
1{ 0 0 }
2 6 24
A A
M R q
y x x x a
EI (6.2.15) 自由端でのたわみ角とたわみは,xlとして,
2 3
2 2
2
2
1{ ( ) }
2 6
1{ ( ) }
2 2 6
( )
2 6
{3 ( ) }
6
A A
R q
M l l l a
EI
b qb q
qb a l l b
EI qb a b EI l
qb a a b b EI
(6.2.16)
2 3 4
2
3 4
2 3
2 3
2 3
2 2 3
3 2 3 3 3
1{ ( ) }
2 6 24
1{ ( ) }
2 2 6 24
3 1 1
{(3 ) }
2 6 24
1 1
{(2 ) ( ) }
2 6 24
{(8 2 )( ) }
24
{(8 2 )( 2 ) }
24
(8 18 12 2
24
A A
M R q
l l l a
EI
b l qb q
qb a l b
EI
qb b
a l l b
EI
qb b
a a b b
EI
qb a b a b b
EI
qb a b a ab b b
EI
qb a a b ab b b
EI
3 2 3 3
)
(8 18 12 3 )
24
qb a a b ab b
EI
(6.2.17)
【6.3】
≪問題訳≫
図6.41に示されるように,単純支持はりの点Bに集中荷重Pが負荷さ れている。B 点でのたわみB,たわみ角Bを求めよ。ただし,重ね合 わせ法を用いよ。
≪解答例≫
フリーボディダイアグラムを,図6.3.1に示す。
図6.3.1 フリーボディダイアグラム 力のつり合いから,
1 2 0 1 2
PRR PRR (6.3.1)
A点回りのモーメントのつり合いから,
2 0 2 a
Pa R l R P
l (6.3.2)
式(6.3.2)を式(6.3.1)に代入して,
1 2
R P R bP
l (6.3.3)
重ね合わせ法を用いるように指示されているので,今図 6.3.2に示すよ うにB点を剛体壁と考え,長さaの片持ちはりABに集中荷重R1,長さ
bの片持ちはりBCに集中荷重R2が作用すると考える。
図6.3.2 B点を剛体壁とする2つの片持ちはり
変形後の状態を図6.3.3に示す。
図6.3.3 変形後の状態
すなわち,集中荷重R1によりA点はA’点に移動しそのたわみ量を1, 集中荷重R2によりC点はC’点に移動しそのたわみ量を2とすると,教 科書P.97の表1から,それぞれのたわみ量は次のように求められる。
3 3 3 3
1 2
1 , 2
3 3 3 3
R a Pa b R b Pab
EI EIl EI EIl
(6.3.3)
図6.3.3において,点A’と点C’を直線で結び,水平線A’B’’C’’となす
角度C'A'C''をとする。元々の問題は,A点とC点のたわみは0で
あり,水平を保つ。したがって,図 6.3.4 に示すように,A’点を中心に時 計回りに角度回転させると,A点とC点が水平に戻る。(図6.3.3と図
6.3.4のA’C’の長さは図上では異なるように見えるが,実際の機械材料
の変形は微小である)
図6.3.4 時計回りに角度回転させた後の状態
この際,図6.3.3において,B点を剛体壁と仮定したから,B点のたわみ 角は0である。すなわち,図6.3.4の状態でのB点のたわみ角Bは回 R1
A
B
R2 P
C
R2 R1
B
a b
A C
A’
B B’
C’
R2
R1
a b
l
1
2
C A
B’’ C’’
2 1
B’
A’
B
C’
転させた角度と等しくなる。したがって,図6.3.3より,
2 2
2 1
B 2
2
( )
tan 3
( )( ) ( )
3 3
Pab b a
l EIl
Pab b a b a Pab b a
EIl EIl
(6.3.4)
また,B点のたわみBはBB’の長さに等しい。図6.3.3において,直角 三角形A'B'B''と直角三角形A'C'C''の相似の関係も考慮して,
B 1 2 1
2 2 2 2
2 1
2
BB" B"B' ( )
( )
3 3
a l a b Pa b a b Pa b
l EIl EIl
(6.3.5)
【6.4】
≪解答例≫
フリーボディダイアグラムを,図6.4.1に示す。固定端A,Bにそれぞれ 反力とモーメントが生じ,未知量が 4 つであるため,これは不静定問題 である。
図6.4.1 両端固定はりにかかる力とモーメント
この問題を,図6.4.2のような荷重条件の片持ちはりと考え,重ねあわせ により自由端のたわみとたわみ角を求め,図6.4.1に示す元の状態の境 界条件に合うように,未知量を求めることとする。
図6.4.2 重ね合わせ法の適用
教科書p.97の表6.1を用いて,
① モーメントM0による自由端のたわみ角1とたわみ1
0 0
1
( / 2) 2
M l M l
EI EI
(6.4.1)
2 0
1 1
2 2 2
0 0 0
( / 2)
2 2
3
8 4 8
M l l
EI
M l M l M l
EI EI EI
(6.4.2)
② モーメントMBによる自由端のたわみ角2とたわみ2 モーメントの向きが表6.1と逆であることに注意して,
2
M lB
EI (6.4.3)
2
2 2
M lB
EI (6.4.4)
③ 集中荷重RBによる自由端のたわみ角3とたわみ3 集中荷重の方向が表6.1と逆であることに注意して,
2
3 2
R lB
EI (6.4.5)
3
3 3
R lB
EI (6.4.6)
以上の結果を重ね合わせることにより,自由端でのたわみ角とたわみ
は,
1 2 3
2 0
0
2 2
( 2 )
2
B B
B B
M l M l R l
EI EI EI
l M M R l
EI
(6.4.7)
2 2 3
0
2 0
3
8 2 3
(9 12 8 )
24
B B
B B
M l M l R l
EI EI EI
l M M R l
EI
(6.4.8)
図6.4.1のはりの右端の境界条件は,固定端であるので,
0, 0
(6.4.9)
したがって,式(6.4.7)と(6.4.8)に式(6.4.9)の条件を適用して,MBとB に関する次の連立方程式が導かれる。
2MBR lB M0 (6.4.10)
12MB8R lB 9M0 (6.4.11)
上の連立方程式を解いて,
0
1 4
MB M (6.4.12)
0
3 2
RB M
l (6.4.13)
≪おまけ≫
左の固定端の反力RAとモーメントMAを求める。
力のつり合いから
0
0 3
A B A B 2
R R R R M
l (6.4.14)
原点回りのモーメントのつり合いから
0 0
A B B
M M M R l
上式を解いて,
MA M0 MB
RA RB
M0 MB
RB
A 0 B B
0 0 0
0
-
1 3
4 2
1 4
M M M R l
M M M
M
(6.4.15)
【6.5】
≪問題訳≫
図6.43に示されるように,連続のフレームがA点で固定,C点ではロ ーラーにより支持され,B点では水平力Pが負荷されている。垂直部材 ABの次期方向の伸びは無視して,C点の反力RCを求めよ。曲げ剛性 EIは全域に渡って一定である。
≪解答例≫
フリーボディダイアグラムを描くと,図6.5.1のようになる。
図6.5.1 フリーボディダイアグラム
図6.5.2 C点での支持が無い場合のFBD
ここで,まず,C点の支持が無い場合を考える。このときの,フリーボディ ダイアグラムは図6.5.2となる。A点は固定端なので,荷重Pとつり合う 水平方向反力RAと固定モーメントMAが生じている。これらは,力のつ り合いとモーメントのつり合いから,
A 0 A
PR R P (6.5.1)
A 0 A
M Pl M Pl
(6.5.2)
図6.5.2に示すように,鉛直上向きにx軸を取ると,xの位置の仮想断
面に働くモーメントMは,
A A
A A 0
( )
M M R x
M M R x
P l x
(6.5.3)
B点,すなわち,x = lでは,
M0 (6.5.4)
このときの変形は,図6.5.3のようになる。水平荷重PによるC点のたわ み量Pは,B点で直角にC点まで折り曲がらず,そのままC’点まで真 直ぐであった場合の,B点のたわみ角にBC’間の長さをかけたものと等 しい。教科書p.97表6.1から
2 3
2 2
P P
Pl Pl
l l
EI EI
(6.5.5)
図6.5.3 C点での支持が無い場合の変形
実際には,図6.5.1のようにC点で支持反力RCも作用する。このたわみ 量は,
C 3 C R 3
R l
EI (6.5.6)
ここで,図6.5.1における,A点の固定モーメントを考えてみよう。モーメ ントのつり合いから
A C 0 A ( C )
M Pl R l M R P l
(6.5.7)
xの位置の仮想断面に働くモーメントMは,
A A
A A
C
0 ( )
M M R x
M M R x
P l x R l
(6.5.8)
P
RC
RA MA
C
A B
VA x
P
RA MA
C
A B
x
P
C
C’
B
A
’P
P
B点,すなわち,x = lでは,
MR lC (6.5.9)
式(6.5.4)と異なり,B点にモーメントが働く。このモーメントのC点のたわ み量への影響を考える必要がある。B 点のモーメントによるたわみ量は,
3 C
M M
R l l Mll
EI EI
(6.5.10)
式(6.5.5),(6.5.6),(6.5.10)のたわみ量を重ね合わせた結果,C 点のた わみ量が0にならなければいけない。したがって,
C
3 3
3
C C 0
2 3
P R M
R l R l Pl
EI EI EI
したがって,
C
3
R 8P (6.5.11)
【6.6】
≪解答例≫
フリーボディダイアグラムを描くと図6.6.1のようになる。
図6.6.1 段付はりのフリーボディダイアグラム
力のつり合いから,
A B 0
R R P (6.6.1)
A点回りのモーメントのつり合いから,
2 B 0 Pl R l
(6.6.2)
式(6.6.1)と(6.6.2)より,
B 2
A
R R P (6.6.3)
この問題は左右対称であり,中央ではたわみ角が0である。したがって,
図6.2に示すように片持ちはりのたわみを求める問題に簡単化できる。
図6.2 等価な片持ちばりの問題
自由端Aからxの位置でのモーメントMは,
A 2
MR xPx (6.6.4)
区間を分けてたわみの基礎式に代入すると,
(a) 0 x l
2 1
2 2
d y M P
dx EI EIx (6.6.5)
上式を順次積分して,
2 1
1 ( 1)
2 2
dy P x
dx EI C (6.6.6)
3
1 ( 1 2)
2 6
P x
y C x C
EI (6.6.7)
(b) 3
l x 2l
2 2
2 2 4
d y M P
dx EI EIx (6.6.8)
上式を順次積分して,
2
2 2 ( 3)
2 4
dy P x
dx EI C (6.6.9)
3
2 ( 3 4)
2 12
P x
y C x C
EI (6.6.10)
境界条件は,
3
x2lで,y0, 0 (6.6.11)
式(6.1.11)を式(6.1.9),(6.1.10)に適用すると,
2 3
1 3( ) 0
4 2l C
3
3 4
1 3 3
( ) 0
12 2l C 2lC 上の連立方程式を解いて
2 3
9
C 16l , 4 9 3
C 16l (6.6.12)
P
RA RB
A B
C
RA
l l/2
I 2I
x
y A
D C
したがって,
2 2
2
( 9 )
2 4 16
P x EI l
(6.6.13)
3 2 3
2
9 9
( )
2 12 16 16
P x
y l x l
EI (6.6.14)
D点での連続の条件は,
xlで,y1y2, 1 2 (6.6.15)
式(6.6.15)を式(6.6.6),(6.6.7),(6.6.13),(6.6.14)に適用して,
2 2
2 1
9
2 4 16
l l
C l
3 3
3 3
1 2
9 9
6 12 16 16
l l
C l C l l
上の連立方程式を解いて
2 1
13
C 16l , 2 35 3
C 48l (6.6.16)
したがって,
2 2 1
( 13 )
2 2 16
P x EI l
(6.6.17)
3
2 3
1
13 35
( )
2 6 16 48
P x
y l x l
EI (6.6.18)
A 点のたわみは,式(6.6.18)でx0を代入したものである。したがって,
35 3
96 Pl
EI (6.6.19)
【6.7】
≪解答例≫
図6.7.1に示すように,自由端Aを原点にとりx座標を定める。xの位
置での断面の直径をdx,断面二次モーメントをIx,断面係数をZxと する。また,固定端Bでの直径をd0,断面二次モーメント,断面係数を,
それぞれ,I0,Z0とする。
図6.7.1 円形断面の平等強さはり
この場合これらの値は以下のように与えられる。
4
64
x x
I d , 3
( / 2) 32
x
x x
x
Z I d
d
(6.7.1)
4 0 64 0
I d , 0 0 03
( 0/ 2) 32
Z I d
d
(6.7.2)
また,xの位置の仮想断面に生じているモーメントをMとすると,仮想 断面回りのモーメントのつり合いから,
MPx0 M Px (6.7.3)
xの位置における最大曲げ応力xmaxは,
max 3
32
x
x x
M Px
Z d
(6.7.4)
一方,xlの固定端Bに生じる最大曲げ応力lmaxは,次式で与えら れる。
max 3
0 0
x l 32
l
M Pl
Z d
(6.7.5)
平等強さであるため,式(6.7.4)と式(6.7.5)は等しくなる。
3 3
0
32 32
x
Px Pl
d d
(6.7.6)
したがって,
03 x
d d x
l (6.7.7)
式(6.7.7)を式(6.7.1)に代入して,
4 4/3 4/3
0( ) 0( ) 64
x
x x
I d I
l l
(6.7.8)
たわみの基礎式に代入すると,
2
2 4/3
0 1 3 0
( / ) ( )
x
d y M Px
dx EI EI x l Pl x EI l
(6.7.9)
順次積分すると,
2/3 1 0
{ ( )3 }
2
dy Pl x
l C
dx EI l (6.7.10)
5/3
1 2
0
2 5/3
1 2
0
{3 3 ( ) }
2 5
{9 ( ) }
10
Pl x
y l l C x C
EI l
Pl x
l C x C
EI l
(6.7.11)
境界条件は,xlが固定端であることから,
0 0 x l
x l y
で
で (6.7.12)
条件式(6.7.12)を式(6.7.10),式(6.7.11)に適用して,
1
3
C 2l, 2 3 2
C 5l (6.7.13)
d0 x
P
A
B dx
y