On the Computational Complexity
)
ofSystem Diagnosis
HIDEO FUJIWARA, MEMBER, IEEE, AND KOZO KINOSHITA, MEMBER, IEEE
Abstract-In this paper we analyze the computational complexity ofsystemdiagnosis. We show that severalproblems for instanta- neous and sequential fault diagnosis ofsystens are polynomially complete and that for single-loop systems these problems are solvable in polynomial time.
Index Terms-Faultdiagnosis, polynomial time algorithm, poly- nomiallycomplete,self-diagnosablesystems, Turingmachines.
I. INTRODUCTION
THEAVAILABILITY ofcomputersis a matter ofprime concern, as well as their reliability, and consequently formal studies of self-diagnosabilityarerequired. A number ofpapers dealing with various aspects of self-diagnosable systemshave appeared. Preparata et al.[1]first introduced a graph-theoreticmodel of digital systems for the purpose of diagnosis of multiple faults, and presented methods of optimal connection assignments forone-stepandsequential fault-diagnosis procedures. In this model a system is made upofanumberof units whereeach unit is assumedto be testedbysomeother units. With this model,necessaryand sufficient conditions were given for such systems to be diagnosable forat most tfaulty units [1]-[6].
Moreover, the problem of identifying the faulty units based on the test outcomes of the system was also in- vestigated
[7]-[9].
However, in general, theproblem
of finding a minimum set of faulty units is known to be polynomially complete[7].
That is, this problem can be solved in polynomial time if and only if the traveling salesman,knapsack problem,etc., canbe solvedin polyno- mialtime. In thispaper we show that severalproblemsfor instantaneous and sequential fault diagnosis ofsystems are polynomially complete and that for single-loop systems these problems are solvable in polynomialtime.II. PRELIMINARIES
Consider asystemofnoperating units capable of testing the correctness ofone another. The testing arrangements canberepresented byadirected graphG=
(V, E),
where the setofverticesV={u1, u2, ...,u1}
represents the units. For u ,uj
E V, there is anedge fromvertexuitouj;
i.e.,(ui, uj)
E E, if andonlyif u,testsuj.
The testing unitui
evaluates the tested unituj
as either fault-free or faulty, the evaluation beingmeaningful
only ifui
is fault-free. The test outcome is Manuscriptreceived March 11, 1977; revised November 14, 1977 and February 16, 1978.Theauthorsarewith the Department of Electronic Engineering, Osaka University, Suita-shi, Osaka, Japan.
indicatedby theweight
aij
onthe edge(ui, uj)
E E andobeys the following rule:aij=
O,
ifui
anduj
arefault-free aij= 1, ifui
is fault-free and ujis faultyaij
=O, 1, ifui is faulty.The test outcomes{a1,} =_ais termed thesyndrome ofthe system. Given a directedgraphG = (V, E)of a system S and a syndrome a =
{aij}
of S, the fundamental problem is to identify the faulty units. It should be noted that eachfeasible set of faulty units F must satisfy the following two conditions:1)
aij
=1 for all(ui, Uj)
E E,such thatui,
Fanduj
E F;2)
aij=0 for all(ui, uj)
EE,
such that ui, uJE F.Wecallsuch subsetFofV tobeaconsistentfaultsetofS with respect to a.
Definition
1:
Asystem S, represented byadirectedgraph G=(V, E),
is saidtobe one-stept-faultdiagnosableif, for anysyndromea,there existsat most oneconsistentfaultset F withrespect to a suchthatI
F <t, where X denotes the cardinality ofa set X.It is easy to see that in a one-step t-fault diagnosable system all faulty units can be identified, provided the number of faulty units presentdoes not exceed t.
Let
F,,,
bethesetofallconsistent faultsets withrespect toa such that the number of faulty units present does not exceedt;i.e.,
F,
=,{Fi Fi
<t, Fi
is aconsistent faultset with respect to a}.Definition2: A system S,represented byadirectedgraph G, is said to be sequentially t-fault diagnosable if, for any syndrome a, either
F,,,
= 4 ornFi
eFt,, Fi * 4..
Inasequentially t-fault diagnosablesystem, ifthenumber of faulty units present does not exceed t,
thennFi
eFt,a
F,is notempty if there exists at least onefaulty unit.Thus we can regard all the units belongingto theintersectionasfaulty. Hence there exists a sequenceof applications oftestsand repairs of identified faulty units that allows allfaulty units originally present to be identified.Let Pbe the classof languages accepted bydeterministic polynomial time-bounded one-tape Turing machines, and NP the class of languages accepted by nondeterministic polynomial time-bounded one-tape Turing machines
(see
Aho et al.[13]).
Theproblem"IsP= NP?" isalongstanding open problem in complexity theory. The notion of "P- complete" used here is that ofSahni[12].
0018-9340/78/1000-0881$00.75
©D
1978 IEEEDefinition 3: AproblemP1, issaid tobe P-reducibletoa
problem P2 (written P1 ocP2) if the existence of a deter- ministic polynomial time algorithm for P2 implies the existence ofadeterministicpolynomial timealgorithm for
P1.Definition 4: Two problems, P1 and P2,areP-equivalent if P1 ocP2and P2 ocP1.
Definition 5: A problem
Pi
is saidtobeP-complete ifPi
hasadeterministic polynomial time algorithm if and only if P= NP. Let PC be the equivalence class of P-equivalent problems being P-complete.III. COMPLEXITY OFSYSTEM DLIGNOSIS
One-step fault diagnosisistoidentify all faulty units ina system instantaneously. In a one-step t-fault diagnosable system,there existsa unique consistent fault set, provided that the number of faulty units doesnotexceedt.However, in general, there exists morethan oneconsistent fault set.
Hence, we regard the minimum consistent fault setasthe most likely consistent faultset.Theproblem of finding such
a minimumfaultset isknownto beP-complete [7]. Sequential fault diagnosis isasequenceof applications of tests and repairs of identified faulty units that allows all faulty units originally present to be identified. Hence, in sequential fault-diagnosis procedures it is important to
compute
nFi
eFt,a, F,.Problem 1 (Pl): Given a system S, represented by a directed graph G= (V, E), a syndrome a, and a positive
integer t,does there exista consistent faultsetFof S with respect toasuch that IF <t?
Problem 2 (P2): Given a system S, represented by a directed graph G= (V, E), a syndrome a, a unit u, and a positive integer t, does thereexist
Fi
suchthat u0 Fi
andFiEF,,,?
Problem 3 (P3): Given a system S, represented by a directed graph G= (V, E), a syndrome a, a unit u,and a
positive integer t, does the unit ubelongto
nFi
eFt,.Ft?
Problem 4 (P4): Given a system S, represented by a directedgraph G,asyndromea,andapositive integert,find
nFi
eFt, Fi.Problem5 (PS): Given a system S, represented by a directedgraph G,asyndromea,and-apositive integert,find atleast one unit in
nFi(
Ft,, Fi ifnotempty.Problem 6 (P6): Given a system S, represented by a directed graphG= (V, E),asyndromea,andaunitu,does there exist
Fi
such that u0 Fi
andFi
EFlyl
?Problem 7 (P7): Given a system S, represented by a directed graph G= (V, E), and a syndrome a, find
nFieFlvl,a Fi.
In thissection,weshowthat thepreviously stated prob- lems P1-P5 forsequential and one-stepfaultdiagnosis are P-complete and that problems P6 and P7 are solvable in polynomial time.
Lemmna)I PlocP2.
Proof: Given a system S represented by a directed graph G= (V, E), a syndrome a=
{aij I (ui, uj)E},
and apositive integer t, construct a system S'
represented by
a directed graphG'=(V', E')
such thatV' = V u{up,
Uq} andE=
E u{(UP,
Uq),(Uq, up)}.
Leta'beasyndrome
of S' suchthat a'=a u
{a
=,aq,,
0}.It
caneasilybe shown thataset Fisaconsistent faultsetof Swithrespectto aifandonly
ifF isaconsistent faultsetofS' withrespect to a'such thatup, Uq0
F.Hencewecan seethat apolynomial
timealgorithm
forP2implies
apolynomial
time algorithm forPl. Q.E.D.
Maheshwari
and Hakimi[7]
haveshown that theproblem
of findingthe minimum consistent faultset isP-complete,
and thusP1
EPC. It caneasily
be shown that P= NP impliesP2 E P. Fromthisand Lemma1,
wehaveP2 E PC. It can also be shown that ProblemsP2, P3,
and P4 are P-equivalent. Hence, we have thefollowing theorem. Theorem IPI, P2, P3, andP4EPC.
Todiagnosea
given
systemsequentially,
it isnotalways
necessary to find all the units innFi t,ffF j,
but it is necessary tofind
at least one unit innFi
cFt,oj.
This is Problem5, but evenforP5wecanshowittobeP-complete
in thefollowing theorem.GivenasystemS,
represented by
adirectedgraph
G=(V,
E),
asyndromea,andapositive
integert, letusdefine thesetX.
correspondingto aunituinnFi
eFt,6 Fi
asfollows.X.
is the smallest set of vertices such that1)
uEX,,,
and2)
ifu; E X",
(u,, uj)
E Eandaij
=O,
thenui EX..
LetS'bethe system represented bythedirectedgraph
G' =(V', E')
such thatV'
=V-X.
andE' ={(ui, uj) (ui, uj)
E E,ui,
ujEV'}.
Let
a' ={aijIaijae a, (u,, Uj) EE'}, t'
= t-IX.I
andFt
, = {FI
FI
<t', F'
is aconsistent fault setof S' with respect toa'}.
For the systems SandS', we have thefollowing lemma.Lemma 2
1)
For anyFi
cFta, Xu
'Fi.
2) Ft,= {Fi
FFi=--XU, Fi
EFt,}.
3) nFieFt,6Fe = AF,eF,',G F, UXI .
Proof: 1)
Suppose that thereexistsa set Fsuch thatX.
F andFEF,,,.
Fromthis and the definition ofX.
we can see that there exists an edge(ui, uj)
EE such thatui,
uj
EXu, ui
S F,uj
E F,andaij
=0.
Thiscontradictsthat F is aconsistent faultset ofSwith respectto a.2)
For anyFi
E F,,a,X.
'Fi,
and thusFi-X. Ft,,,.
HenceFt,,
{F!
F =Fi
-Xu, Fi
EFt,Conversely,weshow that for any F E
F,,,,
thereexistsa setFi
such that F! =Fi
-Xu
andFi
EF,,a.
For any F! E
F,,,,,,
F is a consistent faultset of S' with respect to a'. Hence,aij
= 1 for all(ui, UJ)
EE such thatui
0
F' uX.
anduj
E F', andai
=0 for all(ui, uj)
E Esuchthat
ui, uj 0
F' uX..
From the definition ofX.,
wehave thataij
= 1 for all(ui, uj)
E E such thatui
,Fu
uXu
andU E
Xu.
Therefore, F;
uX,
is a consistent fault set ofS with respect to a. Clearly, F uX."=
4 andIF
uXuI
=IFJl
+I X.
<t. HenceFi
= FuX.
is inF,,
andFt,,
c{EFi|F=Fi- Xu, Fi
EiFt,,al
3) From 1)and 2) it is clear that
n Fi= n (F-"-n -
Fi,eFt,,,, FicFt,a Fi Ft,,
Hence
n
Fn=
AF>UXU.
FieFt,a Fi,eFt',,'
Q.E.D.
block B.
10 0 0 0 0 0 1 ] 1 1 1 1 1 0
i- i+ll--- 'W
_l i i+l s s+l uj'1
t_ L
(a)
1,0O O
I 0 0 0 0@_ a-1 i i+l
a.
0 0 1 1 1 1 1 1 1 '0
W-. reo *0--- -*J4
s- s s+l u.,
alternately fauy
alternately faulty
Theorem 2 P5EPC.
Proof: From Theorem 1, P4 E PC.
Clearly,
P5 oc P4. Henceitsuffices to show P4 oc P5.Givenasystem S,represented byadirectedgraphG=
(v,
E),
asyndromec,andapositive integert, then we canfindnFi
EF,,, Fi, usingthe following algorithm.ui-i ui ui+l uS
O : fault-free unit
*: faulty unit
(b) Z! + /2j
;-1US Us+l
alternately faul 1 I0
u.j Lty (c) rti/21
Fig. 1. Illustration forLemma 3.
Algorithm forP4
OUTPUT (the empty set);
while t>0do begin
usethealgorithm for PStofindatleastoneunituin
nFi
eFt,aFiifnotempty;ifthealgorithm judges the intersectiontobeempty
then stop elsebei
- construct theset
X.
correspondingto u;delete all units in X, from thesystem; t+t-
IX-1;
OUTPUT 4-OUTPUT U X,
end end end
From Lemma 2, clearly this algorithm terminates and thenOUTPUT
=nFi Ft,a
F,. Ifthealgorithm
forP5canbe done inpolynomial time,then theprevious algorithmforP4 is apolynomial time algorithm. Hence P4 ccP5. Q.E.D.Theorem 3
P6 and P7 aresolvable in polynomial time.
Proof: Let xl,x2, * x, bethebinary variablescorre- spondingtothe units ui,u2, ,un, respectively, suchthat xi= 1 if unit ul is fault-free, and x,= 0if unit ui is faulty. FromPreparata [2],we seethatasetF isaconsistentfault
setofasystemS withrespect to asyndromeaifandonlyif the assignment of0'stothevariablesinFand of l'stothe variablesnotinFgives the following Boolean expression the value 1:
nj xaiij (xi V v ajajj
aije a
Similarly, for a
consistent
fault set F, which does not contain a given unit Uk, theprevious expression
can be reduced to the followingexpression:Hi (Xi XjaijvXjaHj) -l (xjiikj
vXjaij) (xi V ik).
aiija akiaE aic-a
i,j$#k
Therefore,thejust given Boolean
expression
issatisfiable[14]
if and onlyifui 0
Fforsome F EF,a
Thisexpressionis in2-conjunctive normal form, and thusP6 isP-reducibleto the2-satisfiability
problem which has apolynomial
time algorithm[14].
Hence P6 is solvableinpolynomial
time.We can see that u
0
Ffor some FEFF.,
if and only if uXFeF.
F. Therefore, using a polynomial time algo- rithm forP6,
we candetermine whether u EnF
eFf,
F for eachuE V,andthus we can constructn
FeF,aFinpolyno- mialtime. Hence P7 issolvable in polynomial time.Q.E.D. IV.
SINGLE-LOOP SYSTEMS
A single-loopsystemis asystem
consisting of
acycle
of unitsul,
u2, **,u.
in which unitui
tests unit ui+1,
1 <i <n-1 and unitun
testsunit u1. Thenecessaryand sufficient conditionisgivenfor suchsingle-loop
systemsto besequentially t-fault diagnosable[1], [2].
InSectionIIIwehave shown that, in general, Problems P1-P5 are P- complete. In this
section,
we show that forsingle-loop
systems Problems P1-PS are all solvable in
polynomial
time.Given a
single-loop
systemS,represented by
adirected graphG=(V, E)
andasyndrome
a,letuspartition
theloop
into blocks of units where each blockBi
={ui, ui+1,
,us, ...
,uj}
hastheweightpattemof the formO...01 ...1,
asillustratedinFig.
1(a).
Inthecasewhenthetest outcomes are alll's, thispartition
isonepartition having only
oneblockV. Let(ui, Uj)
be anedgeinE;ui
iscalledthe tail anduj
the head ofthe edge(ui, uj); La]
denotesthe greatestinteger
notexceeding
a, while[al
denotes the smallestinteger
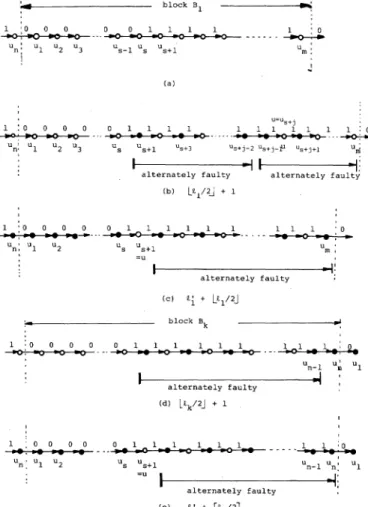
not smaller than a.Lemma 3
Let B1, B2, , Bk beall blocks ofsingle-loop system S with respect tosyndromea.Foraminimumconsistent fault set F with respect to a, we have
|Fl|=
i=Ek1[lJ/2]
where
1i
is thenumber ofedgesofweight 1 whose tail is in blockBi.
Proof: If the syndromeais
a,
where all testoutcomes arel's,thenwehave k= 1;i.e.,block B 1 contains all units in the system. In this case, clearly, thecardinality
of the minimum consistentfault set is[r1 /21.
If a is a syndrome where at least one test outcome 0 appears, then we can let
1i
bethenumberofedges
ofweight
0 whose heads are in blockB1,whereBi
={tu,
ui+1,,.1 us,
,uj}.
Let us be the last unitwhich is the head ofanedge
of weight0[see
Fig.1(a)].
Ifus,
isfaulty,
thenui,
uj+1,
,u are allfaultyand we obtain the smallestsetFio
offaulty
unitsin blockBi,
asshown inFig.l(b).
The numberofsuchfaulty
units isII +Li,/2J.
If us isfault-free,
thenwehave the smallest setFi
1 offaultyunits inB1,
asshowninFig.
1(c).
The number ofsuch faultyunits isr[1/21.
Since li >0,wehave li+
Lli/2jJ [li/21
for alli.Therefore,
FiI
issmaller thanFio,
whichimplies
thatFi
1 isthe smallest setoffaultyunits inBi.
Fromthis,
wecan seethat the union ofFil
for allBi (1
<ik)
is the minimum consistentfault set,thecardinality
of whichisE=
1[li/21.
Q.E.D. Given a single-loop system Srepresented by
adirected graph G=(V, E)
and asyndrome
a,we can compute the value1i
for each blockBi
in0(
VI)
steps.Therefore,
fromLemma 3wehave an
0(I
Vt)
algorithmforcomputing
thecardinality
oftheminimum consistent fault set F.Clearly,
IF
tifandonly
ifthere existsaconsistent faultsetF such that FI
<t. Hence bycomputing |IF
we can solveProblem 1,and thus wehave the
following
theorem. Theorem4Forsingle-loop systemsthereexistsadeterministic
algo-
rithmfor P1 of time complexity0(
VI),
whereVI
is the numberofunits.For single-loop systems, Problems 2 and 3 are also solvablein time complexity 0t( V ).
Theorem 5
Forsingle-loopsystems,thereexistsadeterministic algo- rithm for P2 and P3 oftime complexity
0(
V1).
Proof:Let G=
(V, E)
be thedirected graphrepresent- ingasingle-loopsystem Sandletabe asyndrome.LetFbea minimum consistent fault set with respect to a such that u0 F
foragivenunit u.Clearly,I
F <tifand onlyif there exists aconsistent fault set Fsuchthatu0
Fand F .< t. Therefore,thereexistsan0(I
VI )
algorithm forP2andP3 if wehavean0(I
Vt)
algorithm forcomputing
thecardinality
ofaminimum consistent fault setF
with uP. P
Hence,to complete the proof it suffices to show that thereexists an0(I
V)
algorithm tocomputeI
F withu0 P.
__________________________ block B _I
1 0 0 0 0 0 1 1 1 1 1 :0
u: U1 U2 U3 Us1U S+ U
(a)
U=Us+j
1 O O O 0 1 1 1 1 1 11 11 1 10
un Ul u2 3 U5 Us+l US+3 us+j-2us+jFP u5+j+l um
I
-I]
alternately faulty alternately faulty (b) LtI/21 + 1
1 .0 0 0 0 0 1 1 1 1 1 1 1 1 1 0
u 1:u 2 us us+l ue
=u
alternately faulty
(C) A; + LQ1/2J
block Bk
10 0 0 0 0 1 1 1 1 1 1 11 lB
Un-l n- 01
alternately faulty (d) Ltk/2j + 1
lOB 0e001D ~-t1 1 1 1 l
Un' U1 u2 ua US+1 Un-1 U U1
=u I
alternately faulty (e) Ii + Ft1/21 Fig.2. Illustrationfor Theorem 5.
Let V =
{ul, u2, .,u5}
and let B 1,B2,,Bkbe
, allblocks of V partitioned according to the syndrome a. Ifa is a1 where all test outcomes are l's, then we have k= 1;i.e.,
block -B1 equals V. In this case,clearly,
there exists a minimumconsistentfault setP
withu0 P,
and the cardinal- ity ofFis [n/2].If a is a syndrome where at least one test outcome 0 appears, then without loss of
generality
we assumeu EB1,
B1 = {ul, U2, , US, , Um}, anl= al2= ...=as-I,s= 0
and as,s
+1
= *=am,m,
=1[see Fig. 2(a)].
Let Xbe thesetofunits
us +3,
9Us+5 * selectedalternately
fromus+
until
um.
Clearly,XI
=[ll
/21.Case 1:u
0
X.Clearly,thereexistsaminimum consistent fault setF with u ¢P, and thus It = =[4/2].
Case 2: u E Xand u
* us+,.
Suppose that u=us+j
and unit u isfault-free,
then wehave the smallest setoffaulty
units{us+1, us+3 ,Us+j-2;Us+j1,US
+j+l,Us+j+3, }in blockBl,
-asshowninFig. 2(b).
Thenumberofsuchfaulty
unitsis[11/2]
+ 1. For otherblocksBi,
the smallest number offaulty
unitsis[ri /21. Therefore,
|IF L1l /2J
+ I +i=2E rl-1kCase 3: is=
us+1
andk2.2.
Suppose that unit is isfault-free,
then we have the smallest set offaulty
units in block B1 as shown inFig.2(c).
The number of suchfaulty
units is
I'I
+[1
/2J. Inthiscase,unitu.
in block Bkis also recognizedto befaulty.Therefore,wehave the smallestsetof faulty unitsinblockBk,asshowninFig. 2(d).The number of such faulty units isL[k/2j
+ 1. Hence, wehavek-i
l= [l/2J+ 1I
+LIk/21+
1+ i=2E [ri/21.
Case 4: u= u+1, k = 1, and 11 >2. Suppose that u is
fault-free,
then we have the smallest set offaulty unitsas shown in Fig.2(e).
The number of such faulty units is11
+r1 /21.
Therefore,If I =II
+rl,/2i.
Case 5: u =
u,+,,
k= 1, and 11= 1. Clearly, u=u +1 =u,,, and in this case there exists no consistent fault setF
with u0
F.In anyof thecasesmentioned above,wecancomputethe cardinality ofaminimumconsistent faultsetFwithu
0
Fin computational time of0(1
VI).
Q.E.D. By applying an algorithm forP2 toeach unitui
E V, we cansolve Problems4and 5.Therefore, fromTheorem 5we can seethat P4 and P5aresolvedby0(
V|)algorithm for single-loop systems.Theorem 6
Forsingle-loopsystems there exists adeterministicalgo- rithm for P4 and P5 of time
complexity 0(| VI).
V. CONCLUSION
In this paper wehaveclarified the computational com- plexity of fault diagnosis in self-diagnosable systems. In general, several problems forone-stepandsequentially fault diagnosisareP-complete.However,for single-loopsystems such problems are all solvable in polynomial time.
ACKNOWLEDGMENT
The authors wish to thank Prof. H. Ozaki of Osaka University for hissupport and encouragement.
REFERENCES
[1] F. P. Preparata, G. Metze, and R. T. Chien, "On the connection assignment problemof diagnosablesystems," IEEETrans. Electron. Comput., vol.EC-16, pp. 848-854, Dec. 1967.
[2] F.P. Preparata, "Some results on sequentiallydiagnosablesystems," in Proc. HawaiiInt.Conf.System Sciences, pp. 623-626, 1968. [3] S. L. Hakimi and A. T. Amin, "Characterization of connection
assignment of diagnosable systems," IEEE Trans. Comput., vol. C-23, pp.86-88, Jan. 1974.
[4] F. J.Allan, T. Kameda, and S. Toida, "An approach to thediagnos- ability analysis ofasystem," IEEE Trans.Comput., vol. C-24, pp. 1040-1042, Oct. 1975.
[5] F.Barsi,F. Grandoni,andP.Maestrini,"Atheoryofdiagnosability
of digital systems," IEEE Trans. Comput., vol. C-25, pp. 585-593, June 1976.
[6] S. Toida, "System diagnosis and redundant tests," IEEE Trans. Comput., vol. C-25,pp. 1167-1170,Nov. 1976.
[7] S. N. Maheshwari and S. L. Hakimi, "On models fordiagnosable systems and probabilistic fault diagnosis," IEEE Trans. Comput., vol. C-25, pp. 228-236,Mar. 1976.
[8] T.Kameda, S. Toida, and F.J. Allan, "A diagnosingalgorithm for networks," Inform. Contr., vol. 29, pp. 141-148, 1975.
[9] A.M. Corluhan and S. L. Hakimi, "On an algorithmforidentifying faultsin at-diagnosable system," in Proc. Johns Hopkins Conf. Infor- mationSciencesand Systems, pp. 370-378, Apr. 1976.
[10] S. A. Cook, "The complexity of theorem proving procedures," in ConfJ Rec.3rd ACM Symp. Theory ofComputing, pp. 151-158,1971. [11] R.M.Karp,"Reducibilityamong combinational problems,"inCom- plexity ofComputer Computations, R. E.Miller andJ. W.Thatcher, Ed.NewYork: Plenum, 1972,pp.85-104.
[12] S. Sahni, "Computationally related problems," SIAM J. Comput., vol. 5, pp.262-279, 1974.
[13] A.V. Aho, J. E.Hopcroft,andJ.D.Ullman,The Design andAnalysis of ComputerAlgorithms. Reading, MA: Addison-Wesley, 1974. [14] 0.H.Ibarra andS. K.Sahni, "Polynomiallycompletefault detection
problems," IEEE Trans. Comput., vol. C-24, pp. 242-249, Mar. 1975.
Hideo Fujiwara (S'70-M'74) was born in Nara, Japan, on February 9, 1946. He received the B.E., M.E.,and Ph.D.degreesinelectronicengi-
neering all from Osaka University,Osaka, Japan, in 1969, 1971,and 1974,respectively.
He is currently a Research Assistant in the Department of Electronic Engineering, Osaka University. Hisresearch interests are switching theory and automatatheory, and hespecializesin thedevelopmentoftesting, testablelogicdesign, andsystemdiagnosis.
Dr. Fujiwara is a member of theInstitute of Electronics and Com- munication Engineers of Japan and the Information Processing Society of Japan.
Kozo Kinoshita (S'58-M'64) was born in Osaka, Japan, onJune 21, 1936. Hereceived the B.E., M.E., and Ph.D. degrees in communication engineering all from Osaka University, Osaka, Japan,in 1959, 1961, and 1964, respectively.
Since1964 he has been with OsakaUniversity,
where he isnow anAssociate Professor of Elec- tronic Engineering. His fields of interest are switchingtheory, system and logical design, and fault diagnosis of information processing systems. Dr.Kinoshitais a member of the Institute of Electronicsand CommunicationEngineersof Japan and theInformation ProcessingSociety of Japan.