安全・安心に利用できる自動運転車両の課題
高橋 宏
*The issues of autonomous driving vehicle
that can be used in safety and peace of mind
Hiroshi TAKAHASHI Abstract:
Some technical problems to use an autonomous driving vehicle in peace safely are discussed. The author surveys a scenario of the evolution of the intelligence machine with a road map. And he likens it to the attention driving of a professional driver and thinks about the evolution of the autonomous driving vehicle. When it became the driving scene hard to control by autonomous driving control system, author inspects it about the next behavior in the manual operation driving intervention timing by the human driver to autonomous driving. A problem peculiar to autonomous driving is pointed out. The need to handle "human's operation intentions" in an explicit factor in designing the autonomous driving vehicle behavior similar to a human driver is mentioned. Finally, the author points out a limitation of workaround of the so-called "frame problem" and "symbol grounding".
KEY WORDS : Autonomous vehicle, Human-Machine Interaction, Automated Driving Levels, Take Over Request, Intervention 要旨: 実現が近い自動運転車両を安全に,安心して利用するための技術課題を検討する。知能機械の進化のシナリオを ロードマップで概観しながら,プロフェッショナルなドライバの気配り運転になぞらえて自動運転車両の進化を考 える。そして,自動運転制御で難しい運転場面になったとき,自動運転へのドライバによる手動運転介入タイミン グやその後の挙動について検証し,自動運転特有の問題を指摘する。さらに,人間と同じような自動運転車両挙動 を設計するうえで,「操作意図」などを陽に扱う必要性に言及する。フレーム問題や記号接地問題の回避策による 限界などを指摘する。 キーワード:自動運転車両,ヒューマンマシンインタラクション,自動運転レベル,運転権限移譲要求,制御介入
1.はじめに
2020 年の東京オリンピック開催を前に先進技術の 社会適用が加速している。自動運転車両もその中の 一つである。2015 年 6 月 30 日の閣議決定では,2020 年代に完全自動走行システムの試用開始が明言され た(1)。また,Google 社も 2020 年までに自動運転 車両の実用化を目指すとしている(2)。1990 年代の デルファイ予測(3)では,アメリカにおいて自動運 転車両の普及率が5%を超えるのは,2040 年であろ うと予測されていたが,その予測よりも現実は早く 進んでいるように見える。最近,いわゆる「同一車 線内自動運転技術」といった従来の運転支援システ ムから一歩,自動運転に近づいたシステムの車載適 用が進み,「自動運転車両」が,身近な存在になって きている(4)~(6)。さらに,近年特に現実味をお びてきた新しいAI (7)技術との融合により,自動運 転車両のイメージはますます未来の姿を実現する象 徴的存在となってきている。 著者は,1990 年頃よりこうした自動運転黎明期の 議論に自動車会社のエンジニアとして加わり,様々 な議論に接してきた。検討を開始したころには,「自 動運転中,前方に自動車の絵が書かれた大型看板が あったら,急ブレーキがかかるのか?」などの議論 で白熱したことを鮮明に記憶している。一方,2010 年以降の運転支援システムの市場投入経緯を見ていると「案ずるより産むがやすし」の感がある。本文 では,こうした自動運転黎明期の議論と真実味をお びてきた自動運転車両実現の技術的動向を一つの潮 流としてとらえ,知能機械とそれを利用する人間と いう視点から自動運転車両と利用者の関係について 検討する。特に,「ドライバを含む乗員すべてが安心 して乗れる安全な自動運転車両,もしくは,自動車 に乗っている乗員全体が期待する安全・安心な自動 運転車両挙動」の形態について「安全に気持ちよく, リラックスして自動運転車両を利用できるか?」と いうヒューマンマシンインタフェースの観点に重き を置く。なお,自動運転車両の利用に当たっては, 人間が積極的に自動車運転操作にかかわる場面と完 全に運転操作を自動運転車両に任せる場面がある。 本書では,前者の場合の人間を「ドライバ」,後者の 場合を「利用者」と呼ぶ。2 章では,「利用者が安心 して自動運転車両に乗れる」ための自動運転の検討 視点を知能機械の技術ロードマップから探る。3 章で 「安全・安心」の観点から自動運転車両と人間との 具体的な関係を分類し,4 章でその具体的状況から見 えてくる構造的技術課題を考察する。5 章で課題解決 視点を述べ,6 章でまとめる。
2.知能機械としての自動運転車両
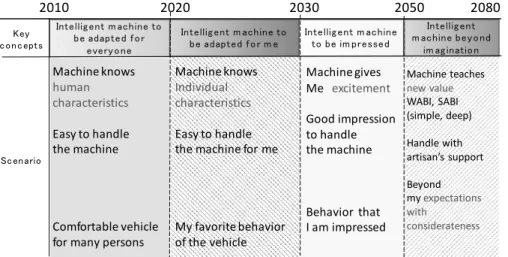
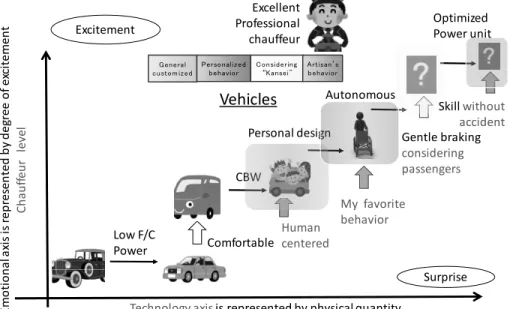
2.1 知能機械の進化シナリオ 技術的なロードマップの中で人間と機械の関係が どのように変化しているかを見極めることは,自動 運転を取り巻く外的環境を考慮し,自動運転の技術 的立場を考えるうえで重要なアプローチであると考 えられる。著者らは,すでに報告されている多数の 技術動向調査(8)~(12)の分析結果から自動車や 知能化家電などの知能機械を検討対象とし,Fig. 1 に示すように,2010 年から 2080 年にかけて 4 つの マクロトレンドに分割したロードマップをまとめた (13)。 4 つのマクロトレンドは,「人間の特性を考慮する 知能機械」から「個人の個別特性(嗜好)を考慮す る知能機械」への進化を経て,「個人に感動を与える 知能機械」,「プロフェッショナルな究極のパフォー マンスに迫る習熟した知能機械」に至る進化の流れ である。この流れにそくして,「みんなが使いやすい 知能機械」から「私が使いやすい知能機械」,「私が 知能機械の挙動に対して「機械とは思えず」感動す る性能」から究極的には,「私の期待を超える知能機 械の挙動」を実現するというシナリオを提示した。 この流れの中で,「感動」,「思いを超える」などの主 観的表現が含まれているが,こうした,感性領域を 考慮して知能機械を設計する必要があり,「人間の五 感特性」に関する要素技術研究など「感性(感動) 軸の物理量による指標化」が重要であるという提案 を行っている。 2.2 未来自動車の評価規範 この知能機械の技術的潮流の中で,自動車の進化 シナリオを象徴的に明示する評価平面をFig. 2 に示 す。横軸は機械としての性能の高さを表現する物理Fig. 1 Road map for the future intelligent machines (13)
2010
2020
2030
2050
Key c on c epts
Intellig ent m achine to be adapted f o r
everyo ne
Intellig ent m achine to be adapted f o r m e
Intellig ent m achine to be im pressed Intellig ent m achine bey o nd im ag inatio n
2080
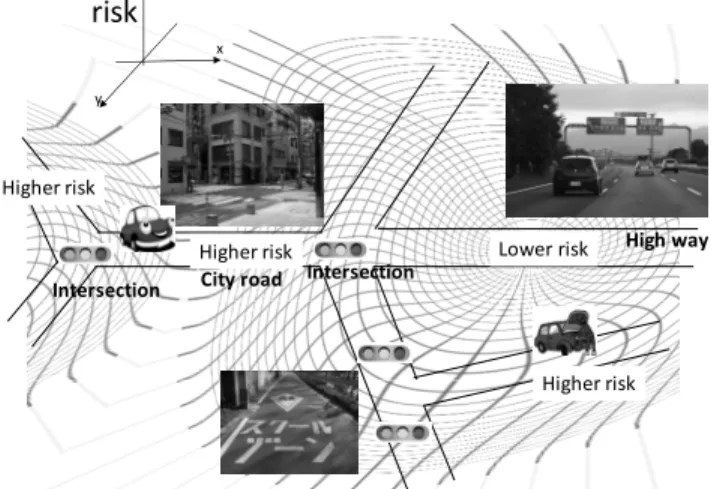
Machine gives Me excitement Good impression to handle the machine Behavior that I am impressed Machine teaches new value WABI, SABI (simple, deep) Handle with artisan’s support Beyond my expectations with considerateness Sc en ario Machine knows Individual characteristics Easy to handle the machine for me My favorite behavior of the vehicle Machine knows human characteristics Easy to handle the machine Comfortable vehicle for many persons量の軸であり,「制御精度」や「効率」などの客観的 な指標である。縦軸は利用者である人間への感動・ 共感といった感性への働きかけに関する心理的指標 である。別の言い方をすれば,乗員に様々な気づか いをしてくれるプロフェッショナルな Chauffeur (いわゆる,お抱え運転手,役員付運転手)の挙動 にどれだけ自動運転車両の挙動が類似するかという 指標となる。Turing (14)は,機械の知能化度合を同 一入力に対する人間挙動との比較によって定義した ので,上記の指標はこの概念を包括していることに なる。この 2 つの軸で張られる平面の中で,Fig. 1 に示したマクロトレンドを考慮した自動車の進化例 をプロットする。自動運転車両の究極挙動は,通常 走行でも緊急時における対応でも,プロフェッショ ナルとして訓練された優秀なChauffeur のような挙 動と相対的に比較評価される。プロフェッショナル なドライバならではの卓越した運転操作や乗員への 気づかいを質的な規範として未来の技術を語る軸の 一つとした。まさにAI により人を超えるであろう対 応も考慮する枠組みとなる。なお,Fig. 2 において, F/C は Fuel Consumption (燃費),CBW は,Control By Wire (ブレーキやハンドルを機械機構でなく電 気的に制御する手法)の略称である。 2.3 安全・安心の視点 自動運転車両と利用者の関係を考えるとき,やは り一番重要なことは,利用者にとって安全に,安心 して自動運転車両を利用できることである。とりわ け,ドライバが運転操作するときに「運転しにくい」 と感じる場面などを中心とした「難しい交通場面」 における自動運転車両の挙動が安全や安心を評価す るための重要なベンチマークとなる。見方を変えれ ば,2000 年以降,高速道路上の道路白線内を操舵制 御走行するレーンキープアシスト(4)や先行車両に 追従走行するオートクルーズシステム(6)がすでに 市場に出ているわけで,その発展形として使用場面 が拡大された運転走行環境下で的確な自動運転がで きるかが重要な視点となる。Fig. 3 は,自動運転車両 が走行するときに走行環境によって自動走行車両の 安全・安心走行を脅かすリスクがどのように変化す るかを直感的に示したものである。磁気や重力など のポテンシャルの図になぞらえており,等高線の高 さは自動運転車両がその場所を走行するときにもつ 危険度合い(ハザードリスク)を示している。車線 の幅が法律によって規定されており,歩行者や自転 車が存在しないことを前提にできる高速道路では, 自動運転車両が持つリスクは小さいと考えられる。 しかし,一般道路や交差点,そのほかの複雑な市街 Excellent Professional chauffeur Technology axis is represented by physical quantity (Precision, Speed, Efficiency, … measurable data) Em o ti o na l ax is is r ep res en ted by de gr ee of ex ci tem en t C h a u ff eu r leve l Surprise Excitement G eneral custo m ized Perso nalized behavio r C o nsid ering “Kansei" Artisan’s b ehavio r
Vehicles
Low F/C Power Comfortable CBW My favorite behavior Personal design Human centered Autonomous Gentle braking considering passengers Optimized Power unit Skill without accident地道路になると,形状が未知な障害物が多数存在す るので,それらの障害物と自動運転車両の関係を考 慮すると,リスクが上昇すると考えられる。 問題は,こうしたリスクが上昇した運転走行環境 で,自動運転車両が利用者とどのような関係を持つ かという問題である。Table 1(15)に現在考えられ ている自動運転車両の自動車と人間の自動化レベル を示す。ここでは,SAE(アメリカ自動車技術会) の提案に基づく自動化レベルを用いる。レベル 2 で は,ドライバが,自動的に運転制御される様子を終 始監視し,異常があったらすぐに運転制御に介入し, 正常な状態にドライバが戻さなければならない。一 方,一歩進んでレベル3 では,基本的に走行制御は 自動的に行われ,ドライバは運転制御監視から解放 される。しかし,自律的な運転制御システムが自己 の制御が運転場面に不適であると判断した場合,利 用者にアラーム信号(TOR; Take Over Request ,
運転権限移譲要求)を出力し,利用者に運転操作を移 行するシステムが想定されている。そして,レベル4 は,そうしたTOR が一切なく,自律的に非常場面を 回避するシステムとなる。現実的にレベル3 の中で, 運転を傍観しているか,まったく関知していない利 用者にTOR により手動操作をゆだねることが可能で あるかという議論はあるが,人間と機械の関係の中 で,こうした制御(操作)の移譲問題を考えると, システムの安全性や安心に利用できるかの状況が具 体的に見えてくる。そこで,3 章では,自動運転シス テムを論じるときに重要なファクターとなる安全で 安心な自動運転車両の指標としてTOR の場面につい て具体的に自動運転車両と利用者の関係を検討する。
Table 1 Automated driving levels
SAE level Name Narrative Definition
0 1 2 3 4 5 No Automation Driver Assistance Partial Automation Conditional Automation High Automation Full Automation
the full-time performance by the human driver the driving mode-specific execution by a driver assistance system of eithersteering or acceleration/deceleration the driving mode-specific execution by one or more driver assistance systems of bothsteering and acceleration/ deceleration
the driving mode-specific performance by an automated driving system of all aspects with the expectation that the human driver will respond appropriately to a request to intervene
the full-time performance by an automated driving system the driving mode-specific performance by an automated driving system, even if a human driver does not respond appropriately to a request to intervene
3.自動運転車両と利用者のかかわり方
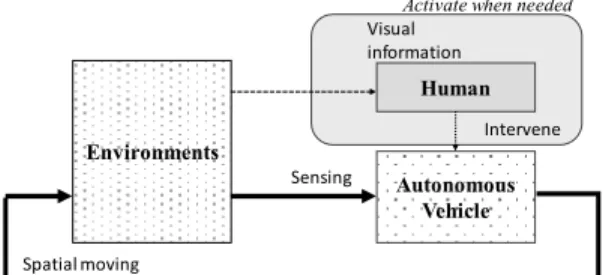
自動運転車両に乗って,目的地に向かっていると きに,自動運転の様子を常に利用者が監視し,何か 不具合があれば,すぐに運転を代わらなければいけ ないと身構えているようなら,自動運転車両を安心 して利用しているとは言えない。「自動運転システ ム」に運転を任せ,運転操作から解放され,そのこ とに不安をいだかないときに初めて自動運転のあり がたさを感じるのである。 これを自動運転車両の制御システムという観点か ら解釈する。Fig. 4 に示すように,自動運転車両の制 御は,自動運転システムが走行環境をカメラやレー ダなどで知覚・理解し,車両挙動を自律的に制御す x yrisk
Lower risk Higher risk Higher risk High way Higher risk City road Intersection Intersectionるクローズドループ制御系で構成されている。しか し,たまたま利用者が自動運転車両の挙動を観察し ており,その挙動に違和感や不安を覚えれば,利用 者が操作介入する場合がある。そこで,安全・安心 の観点から利用者と自動運転車両の関係を論ずるた めに,走行中に遭遇する不安全走行場面で利用者が 制御ループに介入する形態を4つのケースに分類す る。 Environments Autonomous Vehicle Human Spatial moving Sensing Visual information Intervene Closed loop control of autonomous vehicle Activate when needed
Fig. 4 Human factor in autonomous vehicle system I.自動運転走行が行われており,利用者が積極的に 運転操作に介入する意図を持っていないが,停止 位置,車間距離や加減速の仕方などで,なんとな く自動運転車両の挙動に自分の運転操作の仕方と は違うとの違和感を持っている場合。 II.自動運転中,何らかの危機が迫っており,自動運 転車両もそれを認識し,危険に対する回避行動を とっている。一方,利用者もそれを確認して注意 しているのだが,「これ以上,自動運転には任せら れない。自分が何とかする!」と利用者が自動運 転操作系に自発的に介入する場合。状況認識に対 してこれからの事態の推移を人間は予測できる状 態。 III.自動運転走行中,たまたま,利用者がちらっと道 路の様子を見たときに「危険な状態にひっ迫してい る」ことがわかり,なぜ,そのような危険な状態に なったかはわからないまま,緊急回避的に自動運転 操作系に介入する場合。利用者の状況認識としては, 危険に気づける状態であり,自動運転車両は危険に 気が付いていない場合。 IV.自動運転車両が何らかの異常を自身で検出し, 「もう,これ以上自動運転を継続できません。」と いって突然利用者に運転操作の委譲を求める場合。 このとき,利用者の状況認識としては,異常の内容 によって,何が起こったのかすぐに理解できない場 合がある。 Ⅰ.のように通常な自動運転走行で積極的に利用 者が手動操作介入することは少ないが,利用者がい だく車両挙動期待と実挙動が異なることに意識がお よび,利用者が操作介入して挙動を改善したいと思 う場合は,一つの問題場面と考えられる。 著者は, 見通しの良い下り坂で変速機をダウンシフトする場 合,ほぼ同一の環境下で,自分で操作するダウンシ フトタイミングと自動的にダウンシフトされるタイ ミングに対する官能評価の関係を検討した。すると ドライバにとっては,自分が操作したタイミングで あるにもかかわらず,そのタイミングで自動的にダ ウンシフトされると操作が遅く不満である印象を受 ける(16)。官能評価指標が車両挙動の時間的同一性 のみに着目した検討であるが,「自分で行うことと同 じことを自動で行われても人間は満足しないかもし れない」という可能性が示唆される。時間的・空間 的な理想挙動規範の設定方法は,上記Ⅰ.の場面に おいて自動運転特有の課題と位置づけられる。また, そもそも理想挙動期待が厳密に一意に決定されると も考えにくく,自動運転車両の挙動に対するドライ バの違和感や不満を感じる許容範囲,再現性,可観 測性についても検討する必要がある。4 章では,より 切迫した状況下でⅡ.~Ⅳ.における手動操作介入 に関する検討と自動運転特有のヒューマンマシンイ ンタフェースにかかわる課題を示す。
4.自動運転車両特有の構造的課題の分析
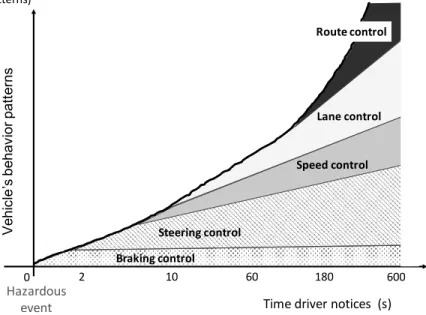
前章で示唆された,いくつかの検討視点について, 本章で詳説する。 4.1 課題 1:緊急時運転操作の引継 自動運転が続けられない複雑な運転場面などで, 今まで利用者として自動運転車両に乗っていた人間 が,すぐにドライバ(運転操作者)として自動運転 システムから運転操作を引き継ぐことができるかが 問題である。3 章で述べたⅡ.~Ⅳ.に相当する緊急 時の議論に対応する。Ⅱ.の場合は,利用者に操作 介入の意図が明確で介入後の操作内容も明確である ので手動操作介入は,あまり問題なく実施されると 考えられる。問題はⅢ.,Ⅳ.である。ドライバとし ては,今まで自動運転モードで走行していたものが 急に手動操作介入しなければならなくなり,モード コンフュージョンやリスク認知に失敗する場合もある(17)。こうした突然の手動操作介入問題を考える ため,自動運転中にドライバが手動操作介入する時 期とその時のドライバがとりうる操作形態の関係を Fig. 5 に示す。 ドライバが操作介入しなければ危険事象が発現す る時刻を 0 としたときに,自動運転中にドライバが 操作介入する事前の時間を横軸に示し,縦軸はドラ イバがその危険事象回避のためにとりえる車両操作 パターン数を概念的に表す。たとえば,ドライバが 急ブレーキを踏むことしかできない状態ならば,パ ターン数は 1 である。ドライバが危険事象を目前に したときのブレーキ操作や操舵操作による危険回避 の自由度をパターン数として扱う。横軸の危険事象 までの余裕時間に関しては,ドライバ操作への運転 支援時の国連欧州経済委員会の自動車基準世界フォ ーラム (WP29) で定める警報のガイドラインを参考 にした(18)。たとえば,ナビゲーションシステムで 「2 km 前方事故渋滞」や「2 km 先,追い越し車線 内落下物あり」などの事前情報のように危険事象出 現に対して60 秒以上余裕があれば,ドライバは,操 舵操作で走行車線を変更したり,加減速・停止など により危険事象に対して回避行動をとることができ る。この時点なら,ドライバがとりえる時空間的な 車両挙動のパターンは多数ある。一方,衝突 2 秒~ 10 秒においては,ドライバがとりえる行動は,10 秒 以上前よりも極度に制限され,障害物を回避するた めの空間的な軌道や停止するまでの速度変化の多様 性も大きく限定されてくる。そして,2 秒以内になる と,もはやドライバは,ブレーキを踏むしか選択の 余地がない場合がほとんどである。完全な自動運転 車両の場合,余裕時間数秒でのドライバ介入は現実 的でないと考えられる。つまり危機直前のⅢ.は, ブレーキを踏むだけにならざるを得ない場合が多い と考えられる。すると,Ⅳ.においては,10 秒程度 以上前で充分イベントに対する挙動回避の自由度が ある場面でドライバ操作への手動操作介入をうなが すことになる。インフラ情報を用いて検知できる場 合もあるが,現実的に突発的に発生する危険イベン トに対して常に10 秒以上前に危険であるかを予測す ることは難しい。たとえば,事故が2 km 先で発生し, 自動運転が「この先,事故発生しましたので運転を 代わってください。」というシチュエーションは技術 的には現実的である。しかし,本来的な自動運転利 用の視点からは歓迎できない。自動運転サービスと してChauffeur であるならば,危険に対して十分余 裕ある時間に何らかの対策を自ら検討し,自動運転 を継続してほしい。 ここで,自動運転車両利用者の視点から自動運転
Fig. 5 Timing of intervene by human driver
Time driver notices (s)
Ve
hi
cl
e’
s
be
hav
ior
pat
terns
(patterns) 0 2 10 60 180Hazardous
event
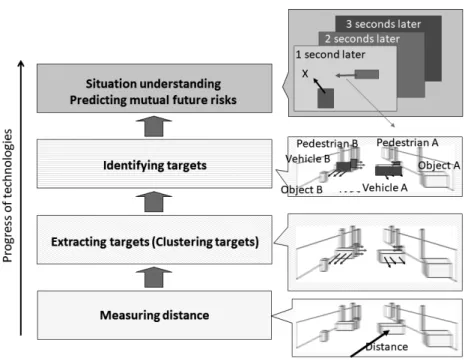
Braking control Steering control Speed control Route control Schedule control 600 Lane controlを設計・開発する設計者の視点で考える。ドライバ の運転操作を前提にした従来の運転支援システムに おいては,危険イベントに対してドライバが操作す る余裕時間がなくなり,また,挙動制御の自由度が なくなる場面で運転支援システムが強制的に「急ブ レーキ」という単一の制御介入を行う形態は,ある 意味,自動車運転支援設計にとっては,制御設計の 自由度が限定されており,制御戦略が設定しやすか った。しかし,自動運転が前提である場合,危険事 象に時空間的にどれだけ接近しているかという自動 運転車両側の状況認識能力とその時にとりうる多様 な車両挙動に対する利用者への引き渡しの難しさと いう点で自動運転車両特有の設計上の制御戦略判断 が必要となる。人間が運転することを前提とした運 転支援システムと自動運転を前提としたシステムは, 決して前者を発展させる技術の積み重ねのみで後者 を実現できないのである。 4.2 課題 2:動的相互リスク予測 自動運転車両の周囲環境認識に関する課題に着目 する。環境認識センサの詳細については他書に譲り たいが,著者は自動運転システムが周囲環境を認識 するためには,人間の認識機序になぞらえ,Fig. 6 に示す4 つの機能が重要であると考える。特に,自 動運転車両にとって周囲物体と自車の相互的な影響 関係を予測することは重要な機能である。これを「動 的相互リスク予測」と呼ぶことにする。ある物体が 時空間的に将来,自車に与えるリスクを推定評価す る。たとえば,高速道路上で自車線前方に車両を検 知した場合,その車両が自車の速度より速く移動し ているならば,追突などのリスクは小さい。しかし, 自車速度よりも遅ければ,追突のリスクが高くなる。 この場合,高速道路という環境で車線内に存在する ものが車両やバイクなどであると仮定できるので, リスクの予測に煩雑な走行環境を考慮する必要はあ まりない。しかし,一般的な市街地道路で歩行者, 自転車や乳母車などが混在する走行環境においては, 前方にある物体と背景を分離し,それがなんである かを同定して,未来の時空間的情報の推移を考慮し ないと自車とのリスク推定はできない。自動運転シ ステムにとって,Fig. 6 に示した機能分担がアルゴリ ズム上で明示的に区分される必要があるかは別にし て,人間であるドライバは無意識のうちにこうした リスク評価を瞬間的に行いながら運転操作を行って
いる。もちろん,人間のドライバであってもこうし た予測ができるようになるためには,ある程度の経 験が必要である。人間の場合は多数の運転場面を経 験することにより,多くの複雑な走行環境とその時 の操作対応を汎化的に学習する。 4.3 自動運転走行場面の拡大 高速道路など走行環境を限定し,動的相互リスク 発生の要因を制限させることにより,陽に動的相互 リスク予測を扱う必要がなくなり,ある程度の自動 運転は実現可能であると考える。これが,すでに市 場に投入されている高速道路での運転支援システム の設計パラダイム上に構築される自動運転である。 しかし,自動運転走行場面の拡大などで周囲状況が 複雑になってきたときに,従来の自動運転システム の走行環境認識アルゴリズム設計パラダイムの延長 上に人間のような環境認識機能が存在するかは疑わ しい。たとえば,複数の車線が合流する場面など「動 的相互リスク予測」の難しさが際立つ。動的相互リ スク予測の方法としては,車車間・路車間通信など により相互車両の動きを客観的に把握し,統合,制 御する場面などが考えられるが,個々のすべての状 況が可観測・可制御であるのが前提となる。従来の ように,ドライバ相互がそれぞれの不確実な情報に 基づき車の挙動を決定しながら交通流全体の流れが 保たれている系において,知能機械の判断で同様な 挙動を実現することは容易ではない。こうした,自 車と対象物がどのような影響を及ぼすのかというリ スク予測を周囲多数の対象に対して行う問題は,い わゆる,人工知能などでよく議論されるFrame 問題 (19)に相当する。これは,コンピュータのプログ ラムの中に,世の中で起こりうる現象をすべてあら かじめ記述して準備しておくことはできないという 構造的な問題として知られている。また,膨大な記 述が仮にできたとしても,相互の関係性を多重に予 測することにより,無限の場面を想定しなければな らなくなり,結果的に自車は身動きが取れなくなっ てしまう。現在,活躍しているロボットは,Frame 問題をうまく回避しながら適用されているが,自動 運転が人間にとって安心して運転できる環境を拡大 しようとしたときにこの問題は再燃すると考える。 詳細は5 章で述べる。 4.4 課題 3:利用者の車両挙動期待 自動運転は,人間の機能である知覚・認知・判断・ 計画などを知能機械で代替することである。しかし, それぞれの機能をそれぞれ機械システムで代替しよ うと考えると非常に難しい,なぜなら,Frame 問題 と同様,人工知能で構造的な問題である Symbol grounding 問題 (20)が存在する。すなわち,機械上 のプログラムと人間の認知機能では,状況の表現方 法(表象形式)が異なるので,上記機能分担を陽に 扱おうとするとコンピュータ上で表現が破綻する問 題を引き起こす。かつてBrooks によって提唱された Subsumption Architecture (21),(22) に基づけば,知 覚・認識・判断・計画などの機能を陽に扱わなくて も,類似した振る舞いを得ることができる。「A と B を検出したら,C を行う。」と記述すればよい。一方, 人間的な考え方ならば,もしくは,少なくとも設計 者ならば,「A を検出し B を検出するということは, 非常に危険な状況であると判断されるのでC を素早 く行う必要がある」という状況認識と危険性の判断 を伴う文脈で操作される C であるのだが,上記の Subsumption Architecture では,理由や動機は排除 される。つまり,経時的な相互要因の文脈を形成す る操作者の挙動期待や操作意図を陽に扱わなくても 条件反射的な対応で自動運転としての機能はとりあ えず実現できるのである。 一方,Norman (23),(24) は,自動車分野ではない が,人間挙動をモデル化する場合,「人間の意図」を 陽に扱う重要性を示唆している。本来,システム設 計時に周囲状況変化を経時的な文脈として理解しな がら操作者の挙動期待や操作意図を明確にして自動 運転車両の操作戦略を生成するほうが,いわゆる, 人間らしい挙動決定が行われ,人間との親和性の高 い自動運転が実現できると考えられる。人間と親和 性が高いということは,利用者の自動運転車両に対 するトラスト(信頼感)が高く,安心して自動運転 車両を利用できる期待を持てる。よって,自動運転 制御の中に人間が求める挙動期待や意図を陽に扱う ことにより,ドライバの期待に沿った自動運転車両 挙動を実現できる可能性がある。特に,自動運転車 両の走行場面が複雑・煩雑になった場合,利用者の 車両挙動期待を陽に扱わない制御は,不必要に3 章 で分類したⅡ.,Ⅲ.を誘発する誤解を招くことにな る。 以上重要と思われる3 つの課題に関して視点を提 示した。これらの課題の重要なことは,部分的な運 転支援や制限された環境下での自動運転車両の実現 ならば上述した Subsumption Architecture 的なア プローチで当面は解釈・解決できる。しかし,その 先の機能を仮定したときに状況や時間的な相互関係 が複雑になると,通信などを利用しても,もはや今 までのアプローチで取り繕えるのかという懸念をい だく。 5 章では,課題解決のための検討視点につい て言及する。
5.安全・安心な自動運転の枠組み
安全・安心な自動運転車両は,Chauffeur が運転 しているようにふるまう車両であると仮定する。た だし,利用者が感じる安全・安心に対する感度に個 人差があるので3 章で述べたⅡ.,Ⅲ.のような場面 は,構造的に必ず起こりうる場面であり,自動運転 中に人間が積極的に手動操作介入を行い,危険回避 操作をする仕組みはある程度必要である。ただし, こうした事態が発生する頻度が重要である。極めて ごくまれにそうしたことが起こるのならば,電車の ように周囲に保安信号を発信して停車する対応が現 実的である。他の自動運転車両はその保安信号位置 を認識して自車の走行計画に考慮する。Fig. 5 で示し たように,自動運転における余裕時間や取り得る挙 動の自由度を考えると危険事象発現よりもかなり前 に利用者へ手動操作介入を誘導する必要がある。 一方,緊急時には,利用者による手動操作介入は ブレーキ操作ぐらいしか現実的でなく,原則的には, 自動運転車両が自分で対応するということが望まれ る。ただ,多数の車両挙動を統括的に細かく制御す る方法が容易ではないことを考えると非常時に電車 のように周囲に存在する車両はすべて停止すること になりかねない。どのように緊急時の挙動を設定す るかは重要なシステムの設計ポリシーであり,交通 流全体としてのコンセンサスが必要となる。 自動運転車両に乗る利用者が安心して,違和感な く乗ってもらうための自動運転車両の挙動をいかに 決定するかという問題では,自動運転車両が人間ら しい判断プロセスを有するかという問題に帰着する。 ここで,もし人間であるChauffeur が自動運転車両 を運転するとすれば,どのように利用者が安心する ような走行を進化実現していくのかを考える。人間 の目や脳の機能になぞらえた自動運転車両の走行環 境認識能力の進化のシナリオをFig. 7 に示す。横軸 は,機械システムにおける人間の目の能力に相当す る進化であり,縦軸は,機械システムとしての検出・ 認識アルゴリズム,すなわち,人間の脳の能力に相 当する進化シナリオである。Fig. 6 で示した対象の同 定,動的相互関係予測など人間のように考える意図 や期待を陽に扱う推論であるとChauffeur が考える 自動運転車両の究極的な挙動を実現する制御特性を 表現しやすい。しかし,そのためには,図に示すよ うに,プログラム上での推論方法の進化や並列処理 などの脳的な進化と通信などによる環境認識技術, インフラ情報利用などの目の能力進化が必要となる。こうした進化は,Frame 問題や Symbol grounding
問 題 に か か わ る 本 質 的 議 論 に な る 。 現 在 の Subsumption Architecture 的回避策のようにあえて 意図を考慮しないでシステムを設計することも可能 であると考えられるが,公共の安全にかかわる移動 Measurement ■Clustering ■Occlusion ■Time resolution ■Spatial resolution ■Detecting area ■Infrastructure ■Reasoning engine ■Parallel processing Brain function ( Clustering, Identification, Prediction of trajectories ) Eyes function ( Resolution, Dynamic‐range, Frame rate ) Extraction Identifi‐ cation Prediction ■Spatial resolution ■Matching (database)
体の設計パラダイムとして相互システムの意図を陽 に扱う必要性は,安全・安心の観点から特に重要で あると考える。 さらに,自動運転システムを設計するエンジニア リングの立場から考えると,複雑化するシステム挙 動の設計に利用者のみならず自動運転車両としての 意図や期待を陽に扱うことができると,合目的的に 全体挙動が記述でき,設計段階において見通しの良 い設計ができる。また,意図の共有を通信でどのよ うに補完していくかも陽に扱うことができる。 Frame 問 題 な ど を 回 避 す る 方 法 と し て John Searle の指摘する強い AI の議論 (25)のような観点 もある。近年画像認識などの分野を中心に機械学習 や特徴量を自動的に抽出するDeep learning による 認識・判別アルゴリズムの進化が目覚ましい (26)。 人間の理解とは異なる特徴を数理的に見つけ出し, 判別する手法である。この手法により判別率は飛躍 的に改善されるが,人間の認知プロセスと異なる判 別規範が用いられる場合があり,Deep learning で得 られた判別式や判別過程に対して人間が設計者の立 場からフォローすることは容易ではない。つまり, コンピュータ上で人間のような思考方法を実現しよ うとするために,ニューラルネットワークなどを適 用し,人間のような推論ができるようになればなる ほど,人間である設計者にとって推論部分はブラッ クボックス化するのである。このことは,重要保安 装置である車の安全をどのように保障するかという 問題に密接にかかわる。開発環境を含めたブラック ボックス化した推論アルゴリズムに関しての見通し の利く設計・評価環境が必要となる。 こ う し た 将 来 の 移 動 運 転 車 両 を 考 え る と き , Subsumption Architecture や機械学習などロボット 工学で培ってきたパラダイムで限定された走行環境 下での活躍は期待できるが,安心して頼りになる本 当の意味でのChauffeur になるためには,大きな方 法論の転換が必要であるのではないだろうか。
6.おわりに
自動運転車両実現時のドライバ,利用者と自動運 転車両の関係について検討した。自動運転車両に乗 るということは,一見,人間が運転するタクシーに 乗っているようなストレスフリーな状態を想像する が,人間でない機械が運転する自動運転車両をいか に信用できるかが重要になる。そうした意味で安心 して楽しく自動運転車に乗れるかという視座は今後 の新しい移動体と人間のかかわり方を考えるうえで 重要である。ロボット工学を中心に環境認識にかか わるデバイス技術や処理プログラムの進歩が目覚ま しい。しかし,ドライバの意図を陽に扱うためには, 人間のならいモデルを実現するための基本的な方法 論を見極めなければならない。5 章で示したように, 皮肉なことに人間である利用者と同じようにふるま う自動運転を実現させようと人間の挙動に近づける ようにAI などで知能機械を構成すると逆に,人間に とって扱いにくい,何を考えているのか見通しがき きにくい機械になっていくジレンマを抱えている。 認識・判断・計画など人間のような認知機能を持 ち,それぞれの機能がエージェントとして構成され た人間型ならい自動車によって究極の自動運転車が 実現されるのか,上述した機能を陽に扱わず,あく までも因果関係の複数記述によって表現される自動 運転車両が活躍するのか,あるいは,別の新たな設 計パラダイムが出現するのか,興味深い時代に生き ている。多数の相互関係を考慮しながら安全を担保 して自動運転車両のアルゴリズムを自動車設計者は いかに作っていくのか,まさに,究極の機械と人間 の関係を考える場面を避けて通ることができない局 面が近づいているのである。 参考文献 (1) 高度情報通信ネットワーク社会推進戦略本部: 政策会議,http://www.kantei.go.jp/jp/singi/it2/ (参照2017.9.10)(2) Google’s Autonomous Vehicle:
http://googlesautonomousvehicle.weebly.com/
(参照 2017.9.10)
(3) S. E. Underwood: Delphi Forecast and Analysis 1991 (Delphi II), IHS Technical Report 92-II (1992)
(4) H. Kawazoe, T. Murakami, O. Sadano, K. Suda, H. Ono: Development of a lane-keeping support system, Proceedings. of Intelligent Vehicle Initiative Technology and Navigation Systems, p. 29-34 (2001)
(5) S. Usui: Driving Assist Technology by Forward Recognition Sensor, Journal of Automotive Engineers of Japan, Vol. 63, No. 12, p. 30-33 (2009)
(6) 高橋宏:ドライバを支援する車の知能化技術, p.11-31, 養賢堂 (2013)
(7) Project Adam: Building an Efficient and Scalable Deep Learning Training System,
http://pdfs.semanticscholar.org/043a/fbd936c95 d0e33c4a391365893bd4102f1a7.pdf
(8) 横断型基幹科学技術研究団体連合,分野横断型科 学技術アカデミック・ロードマップ報告書,経済 産業省 平成 20 年度技術戦略マップローリング委 託事業(2009) (9)(株)KRI, 横断型基幹科学技術研究団体連合, 学会横断型アカデミック・ロードマップ報告書, 経済産業省 平成 19 年度技術戦略マップローリ ング委託事業(2008) (10)(株)日本能率協会総合研究所,(社)日本機械 学会,機械分野アカデミック・ロードマップ作成 支援事業報告書,経済産業省 平成 19 年度技術 戦略マップローリング事業(2008) (11) 井原雅行,ユーザ目線から見た技術進歩のあり 方,2013 年電子情報通信学会総合大会,SS-59 (2013) (12)(株)日本総合研究所,(社)日本ロボット学会, (社)人工知能学会,日本人間工学会,ロボット 分野に関するアカデミック・ロードマップ 報告 書,経済産業省 平成 18 年度技術戦略マップロー リング事業,技術戦略マップとの連携を目指すア カデミック・ロードマップの作成,ロボット分野 に関するアカデミック・ロードマップの作成 (2007)
(13) H. Takahashi, T. Sato, A. Matsumoto, K. Suzuki, H. Igarashi: A ROAD MAP FOR INTELLIGENT MACHINES, Proceedings of 2015 JSME-IIP/ASME-ISPS Joint Conference on Micromechatronics for Information and Precision Equipment (MIPE 2015), MoF-7 (2015)
(14) A. Turing: Computing Machinery and Intelligence, Computers and Thought, p.11-35, Mc. Graw Hill (1963) (15) http://www.sae.org/misc/pdfs/automated_ driving. pdf(参照 2017.9.10) (16) 高橋宏,黒田浩一:車両手動操作系における自 動操作支援介入時期についての一考察,ヒュー マンインタフェース学会論文誌,Vol.2,No.3, p.231-238 (2000) (17) 稲垣俊之:人と機械の共生のデザイン 「人間 中 心 の 自 動 化 」 を 探 る ,p.59-100, 森北出版 (2012) (18) Document WP.29-150-22. Guidelines on establishing requirements for high priority
warning signals: http://www.unece.org/trans/doc/2011/wp29/WP
29-153-09e.pdf ,(参照 2017.9.10)
(19) J. McCarthy, P. J. Hayes: SOME PHILOSOPHICAL PROBLEMS FROM THE
STANDPOINT OF ARTIFICIAL INTELLIGENCE , Machine Intelligence 4: p.463–502(1969)
(20) S. Harnad: Grounding Symbolic Representation in Categorical Perception (PhD thesis), Princeton University (1992) (21) R. A. Brooks: A robust layered control system
for a mobile robot, Robotics and Automation, IEEE Journal, Vol. 2, No. 1, p.14–23(1986) (22) R. A. Brooks: intelligence without
representation, Artificial Intelligence, Vol.47, No.1, p. 139-159 (1991)
(23) D. A. Norman: Categorization of action slips, Psychological Review, 88, p.1-14 (1981) (24) D. A. Norman: The design of everyday things,
New York, Freeman (1990)
(25) J. R. Searle: Minds, brains and programs, Behavioral and Brain Sciences Vol.3, No. 3, p.417-57 (1980)
(26) 小林雅一:AI の衝撃 人工知能は人類の敵か, 講談社 (2015)