超軽量電磁界共振結合モータの基礎研究
著者
堺 和人
著者別名
Kazuto SAKAI
雑誌名
工業技術
巻
41
ページ
39-42
発行年
2019-02
URL
http://id.nii.ac.jp/1060/00010942/
Creative Commons : 表示 - 非営利 - 改変禁止 http://creativecommons.org/licenses/by-nc-nd/3.0/deed.ja超軽量電磁界共振結合モータの基礎研究
Basic study on electromagnetic resonant-coupling motors for ultra-light weight
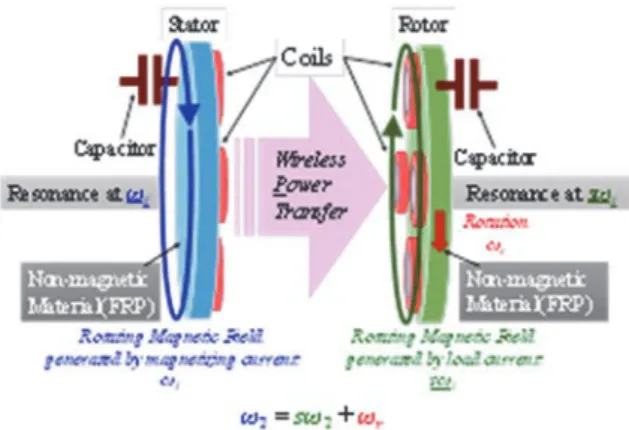
堺 和人* 1.はじめに 電気自動車の実用化で得た新技術の展開と省エネル ギー・環境問題から旅客機の推進エンジンの電動ハイブ リッド化の開発、さらには、空間移動の新分野開拓では 電気飛行機の研究開発が開始されている。しかし、飛行 機の電動化ではモータの超軽量化が必須となる。そこで、 我々は、超軽量化を実現するための基本技術として、磁 気回路である鉄心を不要とする磁界共振結合を用いた 新規モータを創出している(1)-(4)。 本論文は、磁界共振結合を動作原理にした新規の磁界 共振結合モータにおいて、磁界解析と等価回路手法で算 出したモータ特性、試作機による特性実験について論じ る。 2.磁界共振結合モータの原理と理論 2.1 原理 図1は磁界共振結合モータの基本原理を示した概念 図を示す。モータは多相の固定子巻線と多相の回転子巻 線を有し、各巻線には直列にキャパシタが接続された構 成である。多相電流の固定子巻線で回転磁界を形成し、 回転子の多相巻線には誘導電流が発生する。各相の巻線 のインダクタンスとキャパシタにより固定子巻線の電 気回路が駆動周波数で共振する様にキャパシタ値を設 定する。同様に回転子巻線の電気回路が誘導電流の周波 数であるすべり周波数で共振する様にキャパシタ値を 設定する。この共振状態で、固定子の回転磁界の速度と 回転中の回転子上の回転磁界の速度は一致する。また磁 界と電気回路的には、無鉄心で大きな漏れ磁束によるイ ンダクタンスで生じる無効電力はキャパシタで打ち消 され、ほぼ100%で有効に電圧と電流を使用できる。さ らに高周波で過大な鉄損が生じないため高効率で高周 波化が可能になり、高出力が得られる。 2.2 等価回路と共振周波数 磁界解析を用いた特性算出方法はすでに確立したが (1)-(4)、簡易に短時間で特性検討が可能で理論的に特性検 討ができる等価回路は用いられていない。そこで、磁界 共振結合の等価回路を考案し、共振周波数について検討 する。図2に磁界共振結合モータの等価回路を示す。ま た、(1)~(3)式に共振周波数の導出式を示す。(1)~(3) 式から共振状態になる周波数は3つあり、合成リアクタ ンスが0の直列共振と無限大の並列共振である。図3の 概念上のトルクと電流周波数特性曲線上に並列共振周 波数ω0、直列共振周波数ωmとωeを示す。
1 2 2 1 C L o Fig. 1. Conceptual scheme of an MRC motor
Fig. 2. Equivalent circuit of the MRC motor with a slip of 1.
!utor Rotor
w,=sw,+w.
超軽量電磁界共振結合モータの基礎研究
Basic study on electromagnetic resonant-coupling motors for ultra-light weight 堺 和人
1 2
1 2
2 1 C C L L M m
3 2 1 2 1 1 C C L L M e 3.特性解析 3.1 磁界解析とモータモデル モータの周波数特性を得るために有限要素法磁界解析 を行う。原理モデルはエアギャップ長の可変によるモー タ特性を検討するため対向型のアキシャルギャップ形 モータである。アキシャルギャップ形のためモータモデ ルは3次元となり、図4に示す。また、モータの諸元を 表1に示す。原理モータは2 相発振器と単相の増幅電 源を組合せて可能な2 相高周波電源で駆動できる 2 相 モータとする。 3.2 駆動の周波数特性(すべり1) 共振周波数は1 kHz、2 kHz、3 kHz として解析モデル の回路の設けたキャパシタンスを設定した。本モータの 物理的な基本作用は電磁誘導現象と考えられるので、誘 導機の理論と同様に扱うことができる。始めに基本特性 を確認するために、モータの起動状態であるすべり1 (誘導機のすべりと同様)におけるトルクの周波数特性 解析を行う。周波数応答の磁界解析で得たトルクの周波 数特性曲線を図5 に示す。トルクと回転子電流(2 次電 流)は3つの特定の周波数近傍で急峻に増加しているこ とから共振現象が得られていると考えられる。同時に、 急峻なピーク値の共振周波数は1 kHz、2 kHz、3 kHz であり、設定した3つの共振周波数と一致することが確 認された。また、力率特性はこれらの共振周波数近傍で は1であることからリアクタンス成分は0 になる。こ のことからも共振状態であることが確認された。また、 トルクと力率曲線において、2 kHz、3 kHz 近傍では一 つの急峻な山ではなく、各周波数において3 山に分か れた曲線になっている。これらは、2 節の等価回路によ る共振周波数の(1)~(3)式と図 3 で示された3山が生じ ることが解析上で確認された。 4.実験 4.1 実験モデルと実験装置 本新原理モータを実証するために原理モデルを試作 し、基礎実験を行う。試作機は解析モデルと同一の設計Fig. 3. Resonance conditions of the MRC motor derived from the equivalent circuit
Fig. 4. Analytical model of the MRC motor.
TABLEI SPECIFICATIONS FOR MOTOR MODEL
Pole/Phase 4/2 Input voltage (Vrms) 70
Number of strands 2 parallel
Outer diameter (mm) Stator 200 Rotor 200 Series turns (turns/phase) Stator 420 Rotor 420 Coil resistance (Ω) Stator 4.05 Rotor 4.05
ぃ—―
{ 一
↓ [
~
( U N ) 呂 百 0↑
( V ) -g g I n 3 W m W。 w~ Po匹 rsupplye.咤ularfrequency(呻s)値で試作し、図6に試作機、図7に実験装置を示す。高 周波電源は2 相発振器と 2 台の単相増幅電源で構成す る。起動トルクはモータシャフト軸端部に結合させたト ルクゲージで測定する。 4.2 実験結果 図8は駆動電源の周波数を可変してトルクを測定して 得た起動トルクの周波数特性を示す。トルクと2 次電 流は1 kHz、2 kHz、3 kHz を中心に急峻に増加してお り、解析結果と一致する。また、力率特性は、1 kHz、 2 kHz、3 kHz 近傍で1になっており、共振状態である
Fig. 5. Analysis results of frequency characteristics in case of 1, 2, and 3 kHz resonant frequencies in air-gap length of 3 mm.
(a) Torque characteristics
(b) Power factor characteristics
(c) Stator characteristics
(d) Rotor current characteristics
Fig. 6. Experimental model of the MRC motor.
TABLEIISPECIFICATIONS OF THE EXPERIMENTAL MODEL
Fig. 7. Experimental equipment
Pole/Phase 4/2 Input voltage (Vrms) 70
Coil sectional area (mm2) 0.196
Number of strands 2 parallel
Outer diameter (mm) Stator 200 Rotor 200 Series turns (turns/phase) Stator 420 Rotor 420 Coil resistance (Ω) Stator A-phase 4.71 Stator B-phase 4.63 Rotor A-phase 4.71 Rotor B-phase 4.56 12.0 ⑬ ⑪ ⑪ ( < ) - -g -5 ﹄ 4.0 こ 2.0 0.0 0 0 0 0 0 0 0 0 0 0 9 S 7 6 5 4 3 2 0 ( V ) p g -_ o k -S I F r ~ · 狂) 3年
i
i
L
4000超軽量電磁界共振結合モータの基礎研究
Basic study on electromagnetic resonant-coupling motors for ultra-light weight 堺 和人 ことが確認され、解析結果と一致する。さらに各共振周 波数近傍ではトルクのピーク値や力率1の点が3 点の 山があることも確認されて理論と解析結果が妥当であ ることが確証された。 5.まとめ 本論文では、磁界共振結合モータの原理と等価回路によ る共振周波数を示し、磁界解析と試作機による実験結果 より共振周波数でトルクと2 次電流が増大し、力率1 駆動になることが実証された。また、理論的には、固定 子の回転磁界と回転子の回転磁界が設定した特性の周 波数で同時に共振状態になることが検証されたことに なる。今後は、トルクや効率等のモータとしての特性指 標値を高める設計的な面からの検討も行い、実用化に結 び付ける研究の段階に進める。 参考文献 1) 菅澤佑太・堺和人:「超軽量の電磁界共振結合モータの動作 特性の検討」平成28 年電気学会産業応用部門大会,3-11 (2016) 2) 堺和人・他:「超軽量の電磁界共振結合回転電機」平成28 年 電気学会全国大会(2016) 3) 瀧嶋健太・堺和人:「磁界共振を用いた超軽量モータの等価回 路による設計法と運転特性」,平成30 年電気学会全国大会, 5-033 (2018)
4) Kazuto Sakai and Kenta Takijima, “Basic Characteristics of an Ultra-lightweight Magnetic Resonance Coupling Motor with Various Numbers of Poles”, Proceedings of IEEE ECCE2018, pp.7342‐7348, 2018.
Fig. 8. Experimentally derived frequency characteristics with 1, 2, and 3 kHz resonant frequencies and an air-gap length of 3 mm
(a) Torque characteristics
(b) Power factor characteristics
(c) Stator characteristics
(d) Rotor current characteristics
ーJ血 ー2ばh ー 3kf七