インホイールモータを搭載した電気自動車の駆動トルク制御法の提案
吉村雅貴
∗(横浜国立大学),藤本博志(東京大学)
Proposal of Driving Torque Control Method for Electric Vehicle with In-Wheel Motors
Masataka Yoshimura∗(Yokohama National University)
Hiroshi Fujimoto (The University of Tokyo) Abstract
The anti-slip control or the slip ratio control of EVs can improve the stability of vehicle in low µ road. However, these control method cannot control the driving torque. Then in this paper we propose the driving torque control method for EV with in-wheel motors. By using this method, we can control the driving torque directly. Simulations and experiments are carried out to demonstrate the effectiveness of the proposed method.
キーワード:電気自動車,駆動トルク制御,スリップ率,駆動トルクオブザーバ (electric vehicle,driving torque control,slip ratio,driving torque observer )
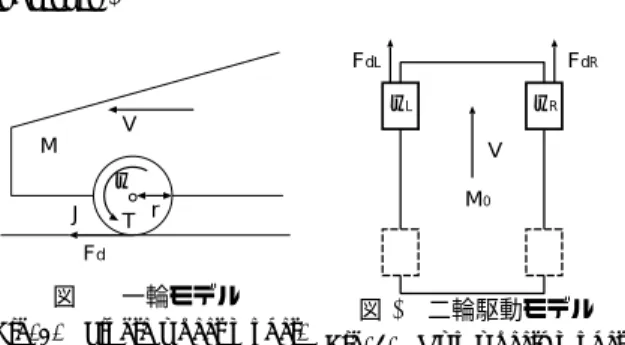
1. はじめに 現在,電気自動車は環境問題への対策の一つとして注目さ れており,盛んに研究が行われている。電気自動車は環境面 だけでなく制御面も優れている。電気自動車の持つ最大の特 徴はモータを駆動力とすることにより得られる高い制御性 であり,内燃機関より百倍程度高速なトルク応答を持ち,発 生トルクを正確に把握できる。また,モータはエンジンより 小型であるため分散配置が可能であるなどの特徴がある。こ れらの利点を活かし内燃機関では実現不可能な高速制御を 行うことができる。このことから電気自動車の利点を活かし た高度な車両制御に関する研究(1)∼(3)が多く発表されてお り,著者らもトラクション制御に関する研究に取り組んでき た(4)∼(6)。 電気自動車のアンチスリップ制御やスリップ率制御は,低 µ路における車両の走行安定性の向上に大きな効果がある。 しかしアクセルとの協調を考えると,トラクション制御とア クセルによるトルク制御を違和感なく切り替えることの困 難性,スリップ率制御においては大駆動力を得ることはでき るが,任意の駆動トルクを得ることができないなどの問題が ある。文献 (7) では駆動トルク指令値と同定したドライビン グスティフネスに基づきスリップ率指令値を生成し,スリッ プ率制御を行うことで駆動トルクを制御し,ヨーレート制御 を行っている。この駆動トルク制御手法ではその時に同定さ れているドライビングスティフネスから駆動トルク指令を満 たすスリップ率を計算しているが,ドライビングスティフネ スはスリップ率により変動するため必ずしも有効とは言えな い。 そこで本稿では駆動トルクオブザーバを用いた電気自動車 の駆動トルク制御法を提案する。本手法は駆動トルクが飽和 しない領域では,一般的なトルク制御による駆動と同様の駆 動効果を持ち,駆動トルクが飽和している場合にはスリップ 率制御と同様のトラクション効果を持つ。本手法では駆動ト ルクがスリップ率の関数であることから,車輪速を車体速に 基づいて変化させることで駆動トルクを制御する。駆動トル クオブザーバにより駆動トルクを推定し,フィードバックす ることで駆動トルクを直接制御することが可能となる。アク V M r T ω J Fd 図 1 一輪モデル
Fig. 1. Single wheel model.
V
FdL FdR
M0
ωL ωR
図 2 二輪駆動モデル
Fig. 2. Two wheels model.
セルをトルク指令ではなく駆動トルク指令とすることで,ア クセルとの完全な協調を実現し,トルク制御と同等の操作感 を持ちながら高 µ 路,低 µ 路を問わず安定した走行が可能 となる。シミュレーションと実車を用いた実験により提案手 法の有効性を確認した。 2. 車両モデル 本節では車両モデルについて説明する。走行抵抗が十分小 さいとすると車両の運動方程式は図 1 の一輪モデルを用いて 式 (1),式 (2) で表現できる。 J ˙ω = T− rFd· · · (1) M ˙V = Fd· · · (2) 各変数は ω[rad/s]: 駆動輪角速度,V [m/s]: 車体速度,T [Nm]: モータトルク,Fd[N]: 駆動力,M [kg]: 一輪換算車体重量, r[m]: タイヤ半径,J[Nms2]: 車輪回転部慣性モーメントと する。ここで式 (2) 中の一輪換算車体重量 M は,車両が二 輪駆動であるとした時の駆動輪一輪当りの加速する車体重量 であり実際の車両重量を M0とすると式 (3) で定義される。 M = M0 2 · · · (3) 次にスリップ率 λ は車輪速 Vω = rωと車体速 V により式 (4)で定義される。 λ = Vω− V max(Vω, V, ε)· · · (4) ここで ε は零割を防ぐための定数である。
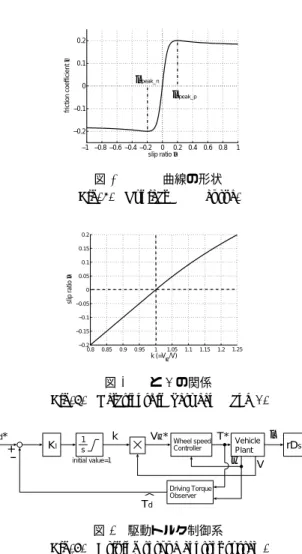
またドライビングスティフネス Dsは式 (5) で定義される。 Ds= Fd λ · · · (5) シミュレーションにおいて,摩擦係数 µ とスリップ率 λ の 関係には Magic Formula(8)を用いる。駆動力 F dはタイヤ 路面間摩擦係数 µ にタイヤの垂直抗力 N = M g/4(g:重力加 速度) から式 (6) で得られる。また駆動トルクは式 (7) で定 義される。 Fd= µN · · · (6) Td= rFd· · · (7) 以上で説明した一輪モデルと一輪モデルが図 2 に示すよう に車両の左右に存在する二輪駆動車両モデルを用いる。 3. 駆動トルク制御 〈3・1〉 駆動トルク制御における操作量 本節では駆動 トルク制御における操作量について説明する。タイヤ路面間 摩擦係数 µ とスリップ率 λ の間には一般的に図 3 に示すよ うな関係がある。µ はあるスリップ率 λpeak pで最大となり,
λpeak nで最小となる。λpeak n≤ λ ≤ λpeak pの領域では λ が
大きいほど µ は大きく,それ以外の領域では|λ| が大きいほど |µ| が小さくなる。よってスリップ率を λpeak n≤ λ ≤ λpeak p 以下の範囲で操作することで µ を制御することができ,駆動 トルクが式 (6) で与えられることから駆動トルクを制御する ことができる。しかしスリップ率の定義は式 (8) のように駆 動時 (Vω≥ V ) と制動時 (Vω< V )で異なるため,車輪速制 御によるスリップ率制御を構成した場合にはスリップ率の定 義により指令値の計算を切り替える必要がある。そのためス リップ率制御による駆動トルク制御は不都合である。 λ = { Vω−V Vω (Vω≥ V ) Vω−V V (Vω< V ) · · · (8) そこでスリップ率ではなく,式 (9) で定義される車体速と 車輪速の比 k を操作することで駆動トルク制御を行う。 k =Vω V · · · (9) スリップ率 λ と k の関係は式 (10) で表される。よって制動 時では λ = 0 の近傍で λ と k はほぼ線形関係であり,制動 時では λ と k は常に線形関係となる。このことからスリップ 率の変わりに k を用いることは妥当であるといえる。λ と k の関係を図 4 に示す。 k = { 1 1−λ (Vω≥ V ) λ + 1 (Vω< V ) · · · (10) 〈3・2〉 駆動トルク制御系の構成 本節では駆動トルク 制御系の構成について説明する。駆動トルク制御系はイン ナーループを車輪速ループとし,アウターループを駆動ト ルクオブザーバを含む駆動トルクループとする構成となる。 駆動トルクとスリップ率の関係はドライビングスティフネス Dsにより式 (11) で表される。 Td= rDsλ· · · (11) kと λ の関係は式 (10) で表されるため,駆動トルク制御系 のプラントは 0 次である。よって駆動トルク制御器には I 制 −1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1 −0.2 −0.1 0 0.1 0.2 slip ratio λ friction coefficient µ peak_n λ λpeak_p 図 3 µ− λ 曲線の形状
Fig. 3. Typical µ− λ curve.
0.8 0.85 0.9 0.95 1 1.05 1.1 1.15 1.2 −0.2 −0.15 −0.1 −0.05 0 0.05 0.1 0.15 0.2 k (=Vω/V) slip ratio λ 1.25 図 4 λと k の関係
Fig. 4. Relationship between λ and k.
KI s1 initial value=1 Wheel speed Controller Vehicle Plant k T* rDs λ ω Td Td* + V Vω* Driving Torque Observer Td ^ 図 5 駆動トルク制御系
Fig. 5. Driving torque control system.
御器を用い,その出力が k となる。車輪速制御系への車輪速 指令値 Vω∗は k と車体速 V より式 (12) で計算する。 Vω∗= kV· · · (12) 駆動トルク制御系を図 5 に示す。駆動トルク制御系は駆 動トルクオブザーバを用いて発生している駆動トルクを推定 し,駆動トルク指令値との誤差に基づき k を操作する。 駆動トルク制御器の積分器に積分値の上限 kmaxおよび下限
kminを設け,k の値を kmin≤ k ≤ kmaxに制限することでスリ
ップ率を制限することができる。kmaxには最大の駆動力を発生 すると考えられるスリップ率 λmaxを満たすVVωを,kminには 最大の制動力が発生すると考えられるスリップ率 λminを満た すVω V を設定する。なお一般に 0 < λmax< 1, −1 < λmin< 0 であるため kmax> 1, 0 < kmin< 1となる。また積分値の初 期値 k0には非駆動状態を想定し,k0= 1(λ = 0)を与える。 〈3・3〉 停車状態からの発進を考慮した駆動トルク制御系 本節では停車状態からの発進を考慮した駆動トルク制御系 について説明する。駆動トルク制御系において車輪速指令 Vω∗を式 (13),式 (14) で与えるとすると,車体速が 0 の状態 (V = 0)で駆動トルク制御をしても,常に Vω∗= 0となって しまうため発進することができない。 Vω∗= kV · · · (13) kmin≤ k ≤ kmax (kmin− 1 ≤ λ ≤
kmax− 1
kmax
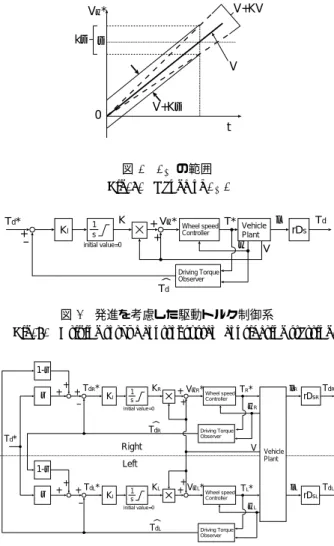
これを避けるために発進のための定数 σ を用い,V < σ に おいて V = σ とみなすことで Vω∗= 0とならないように Vω∗ を式 (15) のように作るとする。 Vω∗= { kV (V ≥ σ) kσ (V < σ) · · · (15) この場合 V < σ においてとりうる車輪速指令値 Vω∗の範囲 は式 (16) のようになる。 kminσ≤ Vω∗≤ kmaxσ· · · (16) よって V < σ において得られる Vω∗の範囲は,設計上の範 囲 (kminV ≤ Vω∗≤ kmaxV )の全範囲を含まないことになる。 上記の問題は k による Vω∗の生成が,単純に Vω∗を V の比 例倍として生成するものであることに起因する。そこで操作 量に式 (17),式 (18) で定義される K を用い,Vω∗を式 (19) のように V と V からの差 KV の和として生成する。そして KV のみ V < σ において Kσ とする。これにより V = 0 に おいても Vω∗の変動範囲が 0 にならないため,V = 0 におい て常に Vω∗= 0となることを防ぐことができる。 K = k− 1 · · · (17) Kmin≤ K ≤ Kmax (Kmin≤ λ ≤
Kmax 1 + Kmax )· · (18) Vω∗= { V + KV (V ≥ σ) V + Kσ (V < σ) · · · (19) この場合 V < σ においてとりうる Vω∗の範囲は式 (20) のよ うになる。 V + Kminσ≤ Vω∗≤ V + Kmaxσ· · · (20) 一般に Kmin < 0であるため V < σ において得られる Vω∗ は,設計上の全範囲 (V + KminV ≤ Vω∗≤ V + KmaxV )を含 む。式 (15) と式 (19) による Vω∗の範囲を図 6 に示す。また 操作量を K とする駆動トルク制御系を図 7 に示す。本稿で は図 7 に示される駆動トルク制御系を採用する。 駆動トルク制御器の積分器に積分値の上限 Kmaxおよび
下限 Kminを設け,K の値を Kmin ≤ K ≤ Kmax に制限
することでスリップ率を制限することができる。Kmaxと Kminにはそれぞれ最大の駆動力,制動力を発生すると考え られるスリップ率 λmax,λminを満たす VωV−V を設定する。 なお一般に 0 < λmax < 1, −1 < λmin < 0であるため Kmax > 0, 1 < Kmin< 0となる。また積分値の初期値 K0 には非駆動状態を想定し,K0= 0(λ = 0)を与える。 〈3・4〉 駆動トルク飽和時におけるヨーモーメントの低減 本節では左右輪の µ が異なるスプリット µ 路において,駆動 トルクが飽和した際に左右輪の駆動トルク差から生じるヨー モーメントを低減する方法について説明する。図 5 に示され る駆動トルク制御では,左右いずれの駆動輪に関しても駆動 トルク指令値が K = Kmaxにおいて発生する駆動トルクよ りも小さいならば,スプリット µ 路においても定常状態にお ける駆動トルク差は発生しない。しかしスプリット µ 路にお いて駆動トルクの飽和が生じた場合は定常状態における駆動 0 t Vω* σ kσ V+Kσ V+KV V 図 6 Vω∗の範囲 Fig. 6. Range of Vω∗. KI s1 initial value=0 Wheel speed Controller Vehicle Plant K T* rDs λ ω Td Td* + ++ V Vω* Driving Torque Observer Td ^ 図 7 発進を考慮した駆動トルク制御系
Fig. 7. Driving torque control system considering starting.
KI s1 initial value=0 Wheel speed Controller Vehicle Plant KR TR* rDsR λR ωR TdR + + + V VωR* Driving Torque Observer TdR ^ ρ 1-ρ + KI s1 initial value=0 Wheel speed Controller KL TL* rDsL λL ωL TdL Td* ++VωL* Driving Torque Observer TdL ^ ρ 1-ρ + + + Right Left + TdR* TdL* 図 8 ヨーモーメント低減駆動トルク制御系
Fig. 8. Driving torque control system with yaw-moment
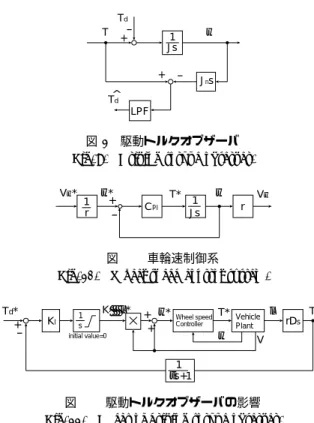
suppression. トルク差が生じ,ヨーモーメントが生じる。 そこで式 (21),式 (22) のように右駆動輪と左駆動駆の駆 動トルク制御系への指令値 TdR∗ ,TdL∗ を,駆動トルク指令値 Td∗と反対側の駆動輪の推定駆動トルク ˆTdL, ˆTdRを重み係数 ρ(0≤ ρ ≤ 1) により重みづけして足した値とする。 TdR∗ = Td∗ρ + ˆTdL(1− ρ)· · · (21) TdL∗ = Td∗ρ + ˆTdR(1− ρ) · · · (22) これによりスプリット µ 路において駆動トルク飽和が生じ た際に,駆動トルクが大きい側の定常状態における駆動トル クは,ρ によって決まる Td∗と飽和側の駆動トルク推定値の 間の値となる。よって駆動トルク制御系への指令値を Td∗と した場合に比べ,駆動トルク差が小さくなり,ヨーモーメン トを低減することができる。駆動トルク差を低減する駆動ト ルク制御系を図 8 に示す。各変数の添え字 R,L はそれぞれ 右駆動輪と左駆動輪に関する変数であることを表す。 〈3・5〉 駆動トルクオブザーバ 本節では駆動トルク制 御に用いる駆動トルクオブザーバについて説明する。式 (1) において発生トルクを計算,角速度を検出できれば図 9 に示 す駆動トルクオブザーバを構成できる。本稿ではトルク制御 系は十分速いとし,トルク指令値と検出した車輪角速度から
LPF Js 1 Jns T ω Td + + T^d 図 9 駆動トルクオブザーバ
Fig. 9. Driving torque observer.
+ r r Vω* ω* T* ω Vω CPI Js 1 1 図 10 車輪速制御系
Fig. 10. Wheel speed control system.
KI s1 initial value=0 Wheel speed Controller Vehicle Plant K λ* T* rDs λ ω Td Td* + ++ V ω* τs+1 1 図 11 駆動トルクオブザーバの影響
Fig. 11. Effect of driving torque observer.
駆動トルクを推定する。 〈3・6〉 車輪速制御系 本節ではインナーループとなる 車輪速制御系について説明する。式 (1) より車輪のトルク T から車輪角速度 ω までの伝達関数は駆動トルク Tdを無視す ると式 (23) で表される。 ω = 1 J sT· · · (23) 車輪角速度制御器 CP Iには式 (23) のプラントに基づき,極 配置法により制御ゲインを決定した PI 制御器を用いる。車 輪速制御系を図 10 に示す。 〈3・7〉 ゲイン設計について 本節では駆動トルク制御 器のゲイン設計について説明する。駆動トルク制御系のゲイ ン KIは角速度制御系を無視したときの駆動トルク制御系の 極が,角速度制御系の極よりも遅くなるように設計すべきで あると考えられる。角速度制御系を無視し,スリップ率が低 い領域において K とスリップ率が等しいみなす。さらに時 定数 τ の駆動トルクオブザーバによるフィードバックの遅れ をフィードバックに時定数 τ の一次 LPF があるものとして 図 11 に示すように表現すると,駆動トルク指令値から駆動 トルクまでの伝達関数は式 (24) で表される。 Td Td∗ = rDsKIs +rDsτKI s2+1 τs + rDsKI τ · · · (24) この伝達関数の極は式 (25) である。 p1, p2= −1 τ ± √ 1 τ2 − 4rDsKI τ 2 · · · (25) 想定される Dsの最大値 Ds maxと最小値 Ds minを決めれば, 駆動トルク制御の極の最大値が得られる。その極が角速度制 御系の極よりも遅くなるように KIを設計する。 4. シミュレーション 駆動トルク制御のシミュレーションを行った。車両モデル のパラメータを表 1 に示す。車両は前輪二輪駆動とし,車 両シミュレータには坂井氏の車両挙動シミュレーションプ ログラム 2D Vehicle ver 1.0(9) を用いた。µ− λ 曲線には 図 3 に示すような λ = 0.2 で µ が最大,λ = −0.2 で µ が 最小となる曲線を用いた。駆動トルク制御系中の車輪速制 御系の極は−20[rad/s],駆動トルクオブザーバの時定数は 30[ms]とした。また駆動トルク制御器のゲインは KI= 0.05 とした。このとき駆動トルク制御系の極は Ds max= 20000, Ds min = 1000を想定すると式 (25) より,いずれの場合も
Re(p1),Re(p2) =−16.7[rad/s] となり,車輪速制御系の極よ
り遅くなる。積分器の積分値制限は λmax= 0.2, λmin=−0.2 として Kmax= 0.25, Kmin=−0.2 とした。発進のための定 数 σ は σ = 0.5[m/s] とした。 はじめに高 µ 路における駆動トルク制御のシミュレーショ ンを行った。シミュレーション結果を図 12 に示す。図 12(a), 図 12(b) より K を操作することで駆動トルクを制御できて いる。このときのスリップ率と車体速を図 12(c),図 12(d) に示す。一般的なトルク制御と同様に加減速ができることが 分かる。 次にトルク制御,駆動トルク制御とヨーモーメント低減 駆動トルク制御を比較するシミュレーションを行った。ト ルク制御では駆動トルク制御における駆動トルク指令と同 じ値をトルク指令として与えた。車両は高 µ 路から発進し, t = 4[s]から駆動トルクが飽和するような低 µ 路を走行,そ して t = 5.5[s] から右車輪側が低 µ 路,左車輪側が高 µ 路で あるスプリット µ 路に進入する。ヨーモーメント低減駆動ト ルク制御の重み係数 ρ は ρ = 0.5 とした。シミュレーション 結果を図 13 に示す。図 13(a),図 13(b),図 13(i) よりトル ク制御では低 µ 路において駆動トルクが飽和しているためス リップ率が増加し続けている。またスプリット µ 路に進入し た際に,スリップ率が高い状態で高 µ 路に進入した左駆動輪 においてスリップ率が低下していく過程で大きな駆動トルク が発生し,大きな駆動トルク差とヨーレートが生じている。 一方で駆動トルク制御とヨーモーメント低減駆動トルク制御 では図 13(c)∼13(i) より低 µ 路において K が Kmax = 0.25 に飽和していることでスリップ率が 0.2 に抑えられ,安定に 駆動できている。またスプリット µ 路に進入した際に生じる 駆動トルク差とヨーレートがトルク制御よりも小さくなって いる。さらにヨーモーメント低減駆動トルク制御では ρ = 0.5 としているため,スプリット µ 路において高 µ 路側の左車 輪の定常駆動トルクは駆動トルク指令値と右車輪の定常駆動 トルクの平均値となり,定常駆動トルク差とヨーレートがト ルク制御と駆動トルク制御に比べて小さくなっている。ただ し総駆動トルクが小さいため車体速は小さくなる。また駆動 トルク指令から見たゲインが ρ 倍されるため駆動トルクの収 束が遅くなっている。 5. 実 験 シミュレーションと同様に駆動トルク制御の実験を行っ た。本稿の実験には本研究室で製作した電気自動車 FPEV2-Kanonを用いた。本車両は前後輪四輪にダイレクトドライブ 方式アウターロータ型インホイールモータを搭載しており,
0 5 10 15 −100 −50 0 50 100 time [s]
estimated driving force Tdhat [Nm]
ref R L
(a) Estimated driving torque.
0 5 10 15 −0.25 −0.2 −0.15 −0.1 −0.05 0 0.05 0.1 0.15 0.2 0.25 time [s] KR ,K L KR KL (b) K. 0 5 10 15 −0.1 −0.08 −0.06 −0.04 −0.02 0 0.02 0.04 0.06 0.08 0.1 time [s] slip ratio λ R L (c) Slip ratio. 0 5 10 15 0 0.5 1 1.5 2 2.5 3 3.5 4 time [s] vehicle velocity V [m/s] (d) Vehicle velocity. 図 12 シミュレーション結果:高 µ 路
Fig. 12. Simulation results:high-µ road.
0 1 2 3 4 5 6 7 8 0 20 40 60 80 100 120 140 160 180 time [s]
estimated driving force Tdhat [Nm]
R L
(a) Estimated driving torque: Torque control.
0 1 2 3 4 5 6 7 8 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 time [s] slip ratio λ R L
(b) Slip ratio: Torque control. 0 1 2 3 4 5 6 7 8 0 20 40 60 80 100 120 140 160 180 time [s]
estimated driving force Tdhat [Nm]
ref R L
(c) Estimated driving torque: Driving torque control. 0 1 2 3 4 5 6 7 8 −0.25 −0.2 −0.15 −0.1 −0.05 0 0.05 0.1 0.15 0.2 0.25 time [s] KR ,KL KR KL (d) K: Driving torque control. 0 1 2 3 4 5 6 7 8 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 time [s] slip ratio λ R L
(e) Slip ratio: Driving torque control. 0 1 2 3 4 5 6 7 8 0 20 40 60 80 100 120 140 160 180 time [s]
estimated driving force Tdhat [Nm]
ref R L
(f) Estimated driving torque: with yaw mo-ment suppression. 0 1 2 3 4 5 6 7 8 −0.25 −0.2 −0.15 −0.1 −0.05 0 0.05 0.1 0.15 0.2 0.25 time [s] KR ,K L KR KL
(g) K: with yaw
mo-ment suppression. 0 1 2 3 4 5 6 7 8 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 time [s] slip ratio λ R L
(h) Slip ratio: with yaw moment suppression. 0 1 2 3 4 5 6 7 8 −0.08 −0.07 −0.06 −0.05 −0.04 −0.03 −0.02 −0.01 0 0.01 time [s]
yaw rate [rad/s]
torque control driving torque control with yaw moment suppression
(i) Yaw rate.
0 1 2 3 4 5 6 7 8 0 1 2 3 4 5 6 time [s] vehicle velocity [m/s] torque control driving torque control with yaw moment suppression
(j) Vehicle velocity.
図 13 シミュレーション結果:低 µ 路・スプリット µ 路
Fig. 13. Simulation results:low-µ road・split-µ road.
表 1 車両パラメータ
Table 1. Parameters of experimental vehicle.
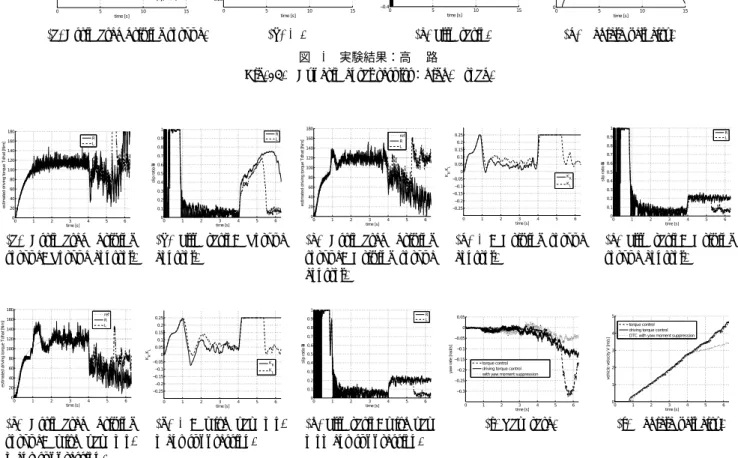
Wheel Inertia J 1.24 Nms2 Wheel Radius r 0.302 m Vehicle Mass M0 850 kg Tread lp 1.3 m Vehicle Inertia I 614 Nms2 本稿の実験では前輪二輪を駆動輪とした。本モータはギアレ ス構造でありバックラッシュの影響が無いため,モータへの 反力情報が失われることはなく駆動トルクオブザーバの実装 に適している。車両パラメータはシミュレーションと同じで ある。制御系中の各パラメータはシミュレーションと同じ値 を用いた。ただし σ のみ σ = 1.0[m/s] とした。車体速の検 出には光学センサを用いた。 はじめに高 µ 路における駆動トルク制御の実験を行った。 実験結果を図 14 に示す。シミュレーションと同様に K を操 作することで駆動トルクを制御できており,トルク制御と同 様に加減速を行うことができることが分かる。なお車体速が 突然立ち上がっているように見えるのは,用いている車体速 センサが約 0.2[m/s] 以下の速度は 0[m/s] として検出するた めである。またスリップ率のはじめの振動は車体速が 0[m/s] と検出されていることからスリップ率が不確定になっている ために生じている。 次にトルク制御,駆動トルク制御とヨーモーメント低減駆 動トルク制御を比較する実験を行った。車両は高 µ 路から発 進し,t = 4[s] から駆動トルクが飽和するような低 µ 路を走 行,そして t = 5.5[s] から右車輪側が低 µ 路,左車輪側が高 µ路であるスプリット µ 路に進入する。実験結果を図 15 に 示す。シミュレーションと同様にトルク制御では低 µ 路にお いてスリップ率が大きくなり,スプリット µ 路進入時に大き なヨーレートが発生している。一方で駆動トルク制御とヨー モーメント低減駆動トルク制御では低 µ 路においてスリップ 率が 0.2 に制限され,スプリット µ 路進入時に発生するヨー レートはトルク制御よりも小さい。またヨーレート低減駆動 トルク制御ではスプリット µ 路におけるヨーレートが他の 手法に比べて抑えられていることが分かる。ただし総駆動ト ルクが小さいため車体速は小さくなっている。 6. おわりに 本稿ではインホイールモータを搭載した電気自動車の駆動 トルク制御法を提案し,その有効性をシミュレーションと実
0 5 10 15 −100 −50 0 50 100 time [s]
estimated driving torque Tdhat [Nm]
ref R L
(a) Estimated driving torque.
0 5 10 15 −0.25 −0.2 −0.15 −0.1 −0.05 0 0.05 0.1 0.15 0.2 0.25 time [s] KR ,K L KR KL (b) K. 0 5 10 15 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 time [s] slip ratio λ R L (c) Slip ratio. 0 5 10 15 0 1 2 3 4 5 6 time [s] vehicle velocity V [m/s] (d) Vehicle velocity. 図 14 実験結果:高 µ 路
Fig. 14. Experimental results:high-µ road.
0 1 2 3 4 5 6 0 20 40 60 80 100 120 140 160 180 time [s]
estimated driving torque Tdhat [Nm]
R L
(a) Estimated driving torque: Torque control.
0 1 2 3 4 5 6 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 time [s] slip ratio λ R L
(b) Slip ratio: Torque control. 0 1 2 3 4 5 6 0 20 40 60 80 100 120 140 160 180 time [s]
estimated driving torque Tdhat [Nm]
ref R L
(c) Estimated driving torque: Driving torque control. 0 1 2 3 4 5 6 −0.25 −0.2 −0.15 −0.1 −0.05 0 0.05 0.1 0.15 0.2 0.25 time [s] KR ,K L KR KL (d) K: Driving torque control. 0 1 2 3 4 5 6 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 time [s] slip ratio λ R L
(e) Slip ratio: Driving torque control. 0 1 2 3 4 5 6 0 20 40 60 80 100 120 140 160 180 time [s]
estimated driving torque Tdhat [Nm]
ref R L
(f) Estimated driving torque: with yaw mo-ment suppression. 0 1 2 3 4 5 6 −0.25 −0.2 −0.15 −0.1 −0.05 0 0.05 0.1 0.15 0.2 0.25 time [s] KR ,K L KR KL
(g) K: with yaw
mo-ment suppression. 0 1 2 3 4 5 6 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 time [s] slip ratio λ R L
(h) Slip ratio: with yaw moment suppression. 0 1 2 3 4 5 6 −0.3 −0.25 −0.2 −0.15 −0.1 −0.05 0 0.05 time [s]
yaw rate [rad/s]
torque control driving torque control with yaw moment suppression
(i) Yaw rate.
0 1 2 3 4 5 6 0 1 2 3 4 5 time [s] vehicle velocity V [m/s] torque control driving torque control DTC with yaw moment suppression
(j) Vehicle velocity.
図 15 実験結果:低 µ 路・スプリット µ 路
Fig. 15. Experimental results:low-µ road・split-µ road.
験により示した。駆動トルクオブザーバを用いて駆動トルク を直接制御することにより,路面状態に関わらず安定した走 行が可能となることを確認した。今後の課題は駆動トルク制 御の高速化と車体加速度制御の検討である。 謝 辞 最後に本研究の一部は NEDO 産業技術研究助成 (プロジェ クト ID: 05A48701d) によって行われたことを付記する。 参考文献 ( 1 ) A.Nagae,K.Hosomi,S.Yamamoto,M.Ooba,Y. Takahira,T.Ishikawa: “Development of Active-Traction Control System”,TOYOTA Technical Review,Vol.50, No.1,pp.68-73,2000 (in Japanese)
( 2 ) Y.Tsuruoka,Y.Toyoda,and Y.Hori: “Basic Study
on Traction Control of Electric Vehicle” ,Trans.
IEE of Japan,Vol.118-D,No.1,pp.44-50,1998 (in Japanese)
( 3 ) H.Sado,S.Sakai and Y.Hori: “ Road Condition Es-timation for Traction Control in Electric Vehicle”,In Proc.1999 IEEE International Symposium on Industrial Electronics,pp.973-978,1999
( 4 ) K.Fujii,H.Fujimoto: “ Slip Ratio Control Based on
Wheel Speed Control without Detection Vehicle Speed
for Electric Vehicle”,VT-07-05,pp.27-32,2007 (in
Japanese)
( 5 ) K.Nakamura,H.Fujimoto: “ Proposal of Slip Ra-tio Control for Electric Vehicle with Inverter Control
Based on PWM Hold”,IIC-08-146, pp.75-80, 2008
(in Japanese)
( 6 ) M.Yoshimura,H.Fujimoto: “ Slip Ratio Control of Electric Vehicle with Singlerate PWM Considering Driv-ing Force”,in Proc. Proc. The 11th IEEE International Workshop on Advanced Motion Control,pp.738-743, 2010
( 7 ) K.Kanou,H.Fujimoto: “ Yaw-rate Control Based on Slip-ratio Control with Driving Stiffness Identification
for Electric Vehicle”,CCS,SY004/04/08/0000-06414,
2008(in Japanese)
( 8 ) H.B.Pacejka,and E.Bakker,“ The Magic Formula
Tyre Model”,Tyre models for vehicle dynamic
anal-ysis:proceedings of the 1st International Colloquium on Tyre Models for Vehicle Dynamics Analysis,held in Delft,The Netherlands,1991
( 9 ) S. Sakai: “ 2D-Tire Model ver 1.0 ”,http://sakai.nnl.is as.ac.jp/index j.html, 2000.