[
計 測 自 動 制 御 学 会 論 文 集 Vol.26, No.2, 225/232 (1990)]
組 立 作 業 に お け る 接 触 状 態 の 位 置 ・力 信 号 の 解 釈 に よ る
識 別 と モ デ ル を も と に し た 識 別 手 続 き の 自動 生 成 †
平 井 慎 一*・浅 田 春比古*
*・得 丸 英 勝*
A Model-Based
Approach
to the Interpretation
of Force and Position
Sensor Signals
for the Process Monitoring
of Assembly
Operations
Shinichi HIRAI*, Haruhiko ASADA** and Hidekatsu TOKUMARU*
A model-based approach to the monitoring of assembly processes is presented. In assem-bly operations, efficient control strategies can-not be generated by single control laws be-cause the task condition varies in the process. Robot manipulators must monitor the process state in order to modify task strategies de-pending on the state. In this paper, we de-velop a new method of generating procedures that identify the state of assembly processes. The procedure interprets displacement and force information acquired in the process in order to identify the process state. In partic-ular, the system is capable of monitoring the contact state; at which surface or edge the assembly parts are contacting to each other.
We first analyze kinematic and static be-havior of assembly parts at each contact state by applying the theory of polyhedral convex cones. The theory enables us to treat con-straints by mechanical contact in a systematic manner. Identification procedures that discrim-inate contact states are formulated with use of the polyhedral convex cones. We then develop a new method of generating the pro-cedures automatically based on geometric mod-els of assembly parts. To reduce real-time computations, the procedures are simplified to a minimum set by using reduction rules of polyhedral convex cones.
Key Words: robot manipulator, manipulation, as-sembly process, signal interpretation, polyhedral
convex cone 1. 緒 言 組 立 作 業 に 代 表 さ れ る マ ニ ピュ レー シ ョ ンに お い て,ロ ボ ッ トと環 境 は機 械 的 接 触 を 通 して 相 互作 用 す へ る.こ の と き環 境 に は,部 品 の 寸 法 公 差 や 位 置 決 め誤 差,接 触 点 に お け る摩 擦 な ど,予 測 が 難 しい 不確 定 性 が 存 在 す る.こ の よ うな不 確 定 性 に対 処 し,ロ ボ ッ ト と環 境 の相 互 作 用 を 扱 う 技 術 と し て 力 制 御 が発 展 し た1).力 制 御 系 で は力 信 号 を フ ィ ー ドバ ック し,適 当 な 制 御 則 に従 って ロボ ッ トの 運 動 を 修 正 す る.ロ ボ ッ トは環 境 に接 触 して い る ので,そ れ らの間 の 幾何 学的 拘 束 に矛 盾 しな い よ うに制 御 則 を 定 め な け れ ば な らな い.た とえ ば,ハ イ ブ リッ ド制 御 を 適 用 す る と きは, 幾 何 学 的 拘 束 に矛 盾 しな い よ う に,位 置/力 制御 モ ー ドを 割 り当 て る必 要 が あ る2). 組 立 作 業 で は,作 業 の進 行 につ れ て 接 触 状 態 が順 次 変 化 す る.た とえ ば軸 穴 の は め合 い過 程 で は,非 接 触 状 態 か ら始 ま り,1点 接 触,2点 接 触 を 経 て 最 終 状 態 に至 る3).こ の よ うな 場 合,あ る 作 業 状 態 で 有 効 な制 御 則 が,他 の 作 業状 態 で も有 効 と は限 らな い.作 業 が 複 雑 に な る と,単 一 の制 御 則 で 目標 を 達 成 す る こと は 困 難 で あ る.柔 軟 な組 立作 業 の た め に は作 業 状 態 を識 別 し,そ れ に 応 じて制 御則 を 切 り換 え る こ と が必 要 で あ る と考 え られ る.す な わ ち,力 信 号 の 直 接 的 な フ ィ ー ドバ ッ グに 加 え て ,よ り高 い レベル の フ ィ ー ドバ ッ ク が必 要 で あ る. 接 触 状 態 は,「1点 接 触 」 「2点 接 触 」 の よ うに適 当 な 記 号 で 表 わ す こ とが で き る.し た が って,制 御 則 の 切 換 え を行 う シス テ ム へ の入 力 と して 必 要 な の は,作 業 状 態 を 表 わ す記 号 で あ る.セ ンサ 信 号 の 直 接 的 な フ ィ ー ドバ ッ クが 信号 レベ ルの フ ィ ー ドバ ックで あ るの に 対 し,作 業 状 態 に応 じた 制 御 則 の 切 換 え は,記 号 レ † 第6回 日本 ロ ボ ッ ト学 会 学 術 講 演 会 で 発 表(1988・10) * 京 都大 学 工 学 部 京 都 市 左 京 区 吉 田本 町
**Center for Information-Driven Mechanical Sys-tems, M.I.T., Cambridge, Massachusetts, U.S.A. *Faculty of Engineering
, Kyoto University, Kyoto (Received June 21, 1989)
226 1990年2月 計 測 自動 制 御 学 会 論文 集 第26巻 第2号 ベル の フ ィー ドバ ッ ク とみ なせ る4).柔 軟 な 組 立 ロ ボ ッ トの 構 築 に は,記 号 レベ ル の フ ィー ドバ ック が必 要 で あ る.記 号 レベ ル の フ ィ ー ドバ ッ クに は,セ ンサ信 号 を 解釈 し作 業 状 態 を 識 別 す る シ ス テ ム が 必 要 で あ る.Lozano-Perezら は,微 細組 立 に お け る 作 業 状 態 の識 別 可 能 性 を 研 究 した5).佐 藤 らは,状 態 の成 立 を 監 視 す る機 構 を も とに行 動 理 解 シ ス テ ム を 構 築 した6). これ らの 研 究 で は,作 業 状 態 の識 別 シス テ ム は あ らか じめ与 え られ て い た.し か し,記 号 レベ ル フ ィ ー ドバ ックを適 用 す るた め に は,識 別 シス テ ム を なん らか の 方 法 で構 築 しな け れ ば な らな い.そ こで 本 論 文 で は, 組 立 作 業 を 対象 に 識別 シス テ ムを 自動 生 成 す る手 法 を 開 発 す る.ま ず接 触状 態 を 定 式 化 し,組 立 過 程 を グ ラ フで 表 わ す.本 論 文 で は,力 セ ンサ信 号 と位 置 セ ンサ 信 号 を扱 う.そ こで,力 ・位 置 情 報 か ら個 々の 接 触 状 態 へ の写 像 を求 め る一 般 的 な 手 法 を開 発 す る.こ の手 法 を 用 い る と,部 品 の 幾 何 学 的 モ デ ル を 与 え る だ け で,識 別 関数 を計 算 す る こ とが 可 能 にな る.識 別 関 数 は で きる限 り簡 単 で な け れ ば な ら な い.そ こで,識 別 関数 の簡 単 化 につ いて 述 べ る.最 後 に,計 算 機上 に 実 装 した結 果 を示 す. 2. モ デ ル を も と に し た 識 別 シ ス テ ム の 自 動 生 成 組 立作 業 で は,不 確 定 性 に 対 処 す るた め に,部 品 を た が い に接 触 させ なが ら,相 対 的 な位 置 決 め を行 う. 接 触 し て い る 面 ・稜 線 ・頂 点 の 組 合 せ は,組 立過 程 の進 行 につ れて 変 化 す る.本 論 文 で は,こ の よ うな組 合 せ を接 触 状 態 と よ び,つ ぎ の よ う な 記 号 で表 現 す る.運 動 物 体 お よ び 固定 物 体 の 面 ・稜線 ・頂 点 に,そ れ ぞ れ番 号 を付 す.面iと 稜 線jの 接 触 を,facet i-edge jと 表 わ す.接 触 状 態 は,こ の よ うな接 触 対 の 集 合 で 表 わ さ れ る.た とえ ば,Fig. 1(d)の 接 触 状 態 は,つ ぎ の よ う に表 わ さ れ る. (facet 1-edge 5, edge 2-facet 7)
接 触 状 態 を ノ ー ドNiに,接 触 状 態 の遷 移 を ア ー クに 対 応 させ る と,可 能 な 組 立 過程 の 全 体 が グ ラフ で表 示 さ れ る.こ れ を,接 触 状 態 グ ラフ とよ ぶ7).接 触 状 態 グ ラフ は,組 立 過 程 の 記 号 表 現 を 与 え る.し た が っ て,セ ンサ 情 報 か らノ ー ドへ の 写 像 を 求 め る こ とに よ り,接 触 状 態 の 識 別 が 可能 に な る.た と えばFig. 1 の例 で,ノ ー ドN2とN3を 識 別 す るた め に はつ ぎ の ル ール を 用 いれ ば よ い. IF fy<0 THEN N2 IF fx<0 THEN N3 こ こでfx, fyは,ロ ボ ッ トが 物 体 に加 え る力 のx, y 成 分 で あ る.こ の ル ー ル のIF節 は セ ンサ情 報 の 集 合 (信号 レベ ル)を,THEN節 は 作 業 状 態(記 号 レ ベ ル)を 表 わ して い る.個 々 の作 業 状 態 に対 応 す る セ ン サ 情 報 の集 合 を 求 め れ ば,こ の ル ー ルを 書 き くだ す こ とが で き る.そ こで,セ ンサ情 報 の集 合 を 求 め る 方 法 につ い て述 べ る. Fig. 2に セ ン サ 信号 と作 業 状 態 の 関 係 を 示 す.実 環 境 下 で は,個 々の 作 業状 態 に特 徴 的 な セ ンサ信 号 が 観 測 され る.こ れ は組 立部 品 の形 状 や 物 理 的 性 質 に よ って 異 な る.し た が って,セ ンサ情 報 か ら作 業 状 態 へ の 写 像 を 求 め る た め に は,組 立部 品 の モ デ ルが 必 要 で あ る.知 能 ロ ボ ッ トの研 究 で は,モ デル を も と に した アプ ロ ー チ の重 要 性 が指 摘 さ れて い る8).特 に ビ ジ ョ ンの 分 野 で 多 くの研 究 が な さ れ,幾 何 モ デ ル か ら代 表 的 な 特 徴 を 抽 出 し認 識 を 行 う手 法 が 提 案 さ れ て い る9).さ らに組 立 過 程 で は,そ れ を 支 配 す る 運 動 学 ・ 静 力 学 上 の 一 般 的 な 法則 が,明 らか に され て い る10). そ こで本 論 文 で は,組 立 部 品 の 幾 何 モ デ ル に組 立 過 程 の運 動 学 的 ・静 力 学 的 法 則 を 適 用 し,個 々の 接 触 状 態 に対 応 す るセ ンサ 情 報 の 集 合 を 求 め る.
Fig. 1 Contact states
Fig. 2 Model-based approach to monitoring
of process state
-104-平 井 ・浅 田 ・得 丸:組 立 作 業 に お け る接 触 状 態 の識 別 と識 別 手 続 きの 自動 生 成 227 3. 観 測 可 能 信 号 集 合 の 計 算 3.1 接 触 状 態 の識 別 ル ー ル 個 々の 接 触 状 態 で観 測 さ れ う る セ ン サ 情 報 の 集 合 を,観 測 可 能 信 号 集 合 とよ ぶ.本 節 で は こ の集 合 の計 算 法 を 示 す.運 動 物体 の 位 置xと 姿 勢 θを ま とめ て, 6次 元 ベ ク トルqで 表 わ し,こ れ を配 位 と よぶ.運 動 物 体 の微 小 変 位 を,6次 元 ベ ク トル Δqで 表 わ す.ま た,並 進 力fと モ ー メ ン トmを ま と め で,6次 元 ベ ク トルpで 表 わ す.本 論 文 で は ,変 位 と力 の 計 測 デ ー タを 扱 う.そ こで,変 位 Δqと 力 Δpを ま と め, 12次 元 ベ ク トルs=[Δq,p]で 表 わ す. 接 触 状 態Niに お け る 観 測 可 能 信号 集 合 をSiで 表 わ す.セ ンサ 信 号 をsm=[Δqm,pm]で 表 わす.こ こで,Δqmは 運 動 物体 の 変 位 を,pmは ロボ ッ トが運 動 物 体 に加 え た 力 を 表 わ す.セ ンサ 信号 の値 が,観 測 可 能 信 号 集 合Siに 含 ま れ るな らば,現 在 の接 触 状 態 はNiで あ る と判 定 さ れ る.す な わ ち,接 触 状 態 の 識 別 条 件 は,つ ぎ の ル ール で 表 わ され る.
IF sm∈Si THEN接 触 状 態 はNi (1)
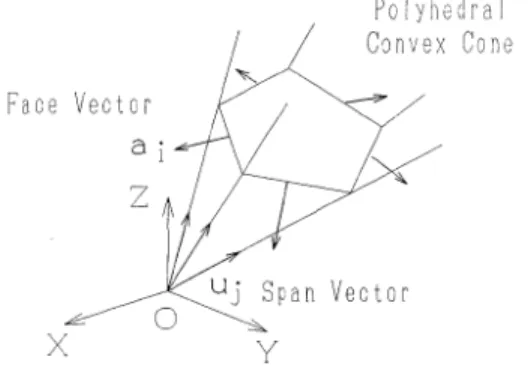
セ ンサ信 号smか ら現 在 の 接 触 状 態 を識 別 す る手 続 き をTable 1に 示 す.こ の 手 続 き は,セ ンサ信 号sm を発 生 す る可 能 性 が あ る接 触 状 態 を す べ て み つ け だ し,集 合CSで 与 え る. 3.2 凸 多 面 錐 理 論 を 用 い た マ ニ ピュ レー シ ョン の 運 動 学 観 測 可 能 信 号 集 合 を 幾 何 モ デ ル か ら計 算 す るた め に は,作 業 過 程 の運 動 学 と静 力 学 が 必 要 で あ る.そ こ で,凸 多 面 錐 の理 論11)を用 いて,マ ニ ピュ レー シ ョ ン にお け る運 動 学 と静 力 学 を 定 式 化 す る.Fig. 3に, 次 式 で 与 え られ る 集合 を 示 す. X={x│aTix≦0,i=1,2,…,m} (2) 集 合Xは,座 標 原 点 を 頂 点 とす る錐 を形 成 して お り, そ の側 面 は,有 限個 の 平 面 か らな って い る.こ の よ う な集 合 を,凸 多 面 錐 と よ ぶ.こ の式 を凸 多 面 錐 のface 形 式 と よび,簡 単 の た あ つ ぎの よ うに表 わす. X=face{a1,a2,…,am} (3) ま た,ベ ク トルaiをfaceベ ク トル と よぶ.凸 多 面 錐 の稜 線 に沿 う ベ ク トル を,ujで 表わ す.凸 多 面 錐 の 任 意 の 要 素 は,こ の ベ ク トル の線 形結 合 で 表 わ さ れ
Table 1 Procedure to identify contact state
Fig. 3 Polyhedral convex cone
る.た だ し,係 数 は すべ て非 負 で あ る.し た が って,
凸 多 面錐Xは,つ ぎ の よ うに 表 わ す こ と が で きる.
k
X=
c~ui ci>O, i-1,2,
...~
(4)
i=1 上 式 は,凸 多 面 錐 の 別 の 表 現 方 法 を 与 え る.こ れ を 凸 多 面 錐 のspan形 式 と よ び,簡 単 の た め つ ぎ の よ う に 表 わ す. X=span{u1,u2,…,uk} (5) ま た ベ ク トルujをspanベ ク トル と よ ぶ.ベ ク トル 値 集 合Xに 対 し て,つ ぎ の 集 合 をXの 極 と よ ぶ. def
X*={UyxEX,xTYGO}
(6)
凸 多 面錐 の極 は 凸 多面 錐 で あ り,こ れ を 双 対 凸多 面 錐 とよ ぶ.ベ ク トル値 集 合X, Yに 対 して,つ ぎ の集 合 をXとYの 凸 和 とよ ぶ. X+Y={x+y│x∈X,y∈Y} (7) 凸 多 面錐 の 共 通 集合 お よ び 凸和 は,凸 多 面 錐 で あ る. 以 上 の 理 論 を も と に,マ ニ ピュ レー シ ョ ン の 運 動 学 ・静 力 学 を 定 式 化 す る.運 動 物 体 ・固定 物 体 は と も に 剛 体 で あ る と仮定 す る.運 動 物体 が と り う る微 小 変 位 Δqの 集 合 を,許 容変 位集 合 とよ ぶ.配 位qに お け る許 容 変 位 集 合 は,次 式 で 表 わ さ れ る10). NA(q) = U An(q)
(8)
n=1 こ こで, An(q)=face{hn1,hn2,…,hnM n} (9) 集 合Aは,凸 多面 錐An(n=1,2,…,N)の 合 併 集 合 で あ る.機 械 的 な 接 触 に よ る拘 束 は,配 位 空 間 内 の超 平 面 で 表 わ され る.ベ ク トルhnmは,こ の 超 平 面 の法 線 ベ ク トル を 表 わ す.物 体 の 運 動 は,あ る方 向 に拘 束 さ れ て いて も,反 対方 向 に 拘束 さ れ て い る と は限 らな い.す なわ ち,拘 束 は 一般 に 片 側 拘 束 で あ り,数 学 的 に は不 等 式 で 記 述 さ れ る. ロ ボ ッ トが物 体 に 加 え る力pは,物 体 が 環 境 か ら 受 け る抗 力 とつ りあ う と仮 定 す る.こ の よ うな 平 衡 条228 1990年2月 計 測 自動 制 御 学会 論 文 集 第26巻 第2号 件 を みた す 力pの 集 合 を,許 容 力集 合 と よぶ.配 位 qに お け る許 容 力 集 合 は,次 式 で 表 わ され る10). F(q)=A(q)* (10) 許 容 力 集 合Fは,,許 容 変 位 集 合Aの 極 で あ る.集 合Fは 凸 多面 錐 で あ る こ とが 示 さ れ て い る10). 以 上 の よ うに,マ ニ ピュ レー シ ョ ンの 微小 運 動 学 お よ び静 力 学 は,凸 多 面 錐 を 用 いて 定 式 化 で き,許 容変 位集 合 や 許 容 力集 合 の計 算 は,凸 多面 錐 の演 算 に帰 着 さ れ る.そ こで,つ ぎ の よ う な 凸 多面 錐 の演 算 ア ル ゴ リズ ム を 開発 し,計 算 機 上 に実 装 した10).
・CONVERT: face (span)形 式 をspan (face)形 式 に変 換 ・DUAL:双 対 凸多 面 錐 を計 算 ・INTERSECT:凸 多面 錐 の 共 通 集 合 を 計 算 ・CONVEXSUM:凸 多 面 錐 の 凸 和 を 計 算 ・ELEMENT:あ るベ ク トル が 凸 多 面 錐 に 属 す る か 否 か を 判定 3.3 観 測 可 能 信号 集 合 の 近 似 計 算 凸 多面 錐 の理 論 を用 い る と,観 測 可 能 信 号 集 合 を 定 式 化 す る こ とが で き る.配 位qに お い て 観 測 さ れ う る セ ン サ信 号s=[Δq,p]は,条 件 Δq∈A(q)お よ びp∈F(q)を 満 た す.し たが っ て,配 位qに お いて 観 測 され うる セ ンサ 信 号 の集 合 は,次 式 で 表 わ さ れ る.
S(q)=
s-
dq
drr~A(q)
(ll)
(8)式 を 代 入 す る と,N
S(q)=
u S()
(12)
n=1 こ こ で,def
~~
~~' EAn(q)
Sn(q) = s=
.P
AEF()
(13)
集 合An(q)お よ びF(q)は,凸 多 面 錐 な の で,集 合 Sn(q)は 凸 多 面 錐 で あ る.し た が って 集 合S(q)は, 凸 多 面 錐Sn(q)の 合 併 集 合 で あ る. 接 触 状 態Niを もつ 配 位 の集 合 をRiで 表 わ す. 観 測 可 能 信 号 集 合Siは,接 触 状 態Niで 観測 さ れ う る信 号 の 集 合 で あ る.し た が って,集 合Siは,次 式 で 表 わ され る.Si=
U S(q)
(14)
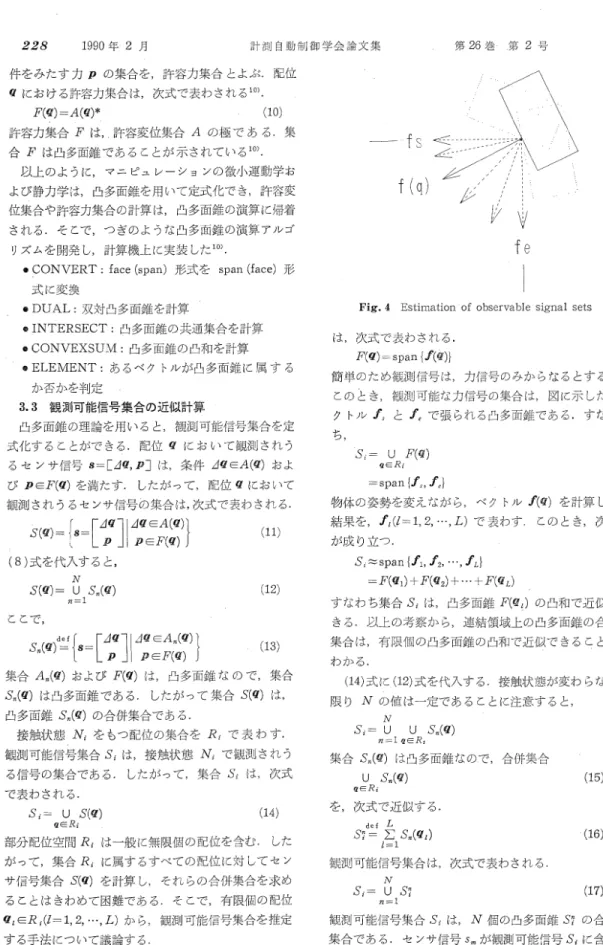
gERi 部 分 配 位 空 間Riは 一 般 に無 限 個 の 配 位 を 含 む.し た が って,集 合Riに 属 す るす べ て の 配 位 に対 して セ ン サ 信号 集合S(q)を 計算 し,そ れ らの 合 併 集 合 を 求 め る こ とは きわ め て 困難 で あ る.そ こで,有 限 個 の 配 位 ql∈Ri(l=1,2,…,L)か ら,観 測 可 能 信 号 集 合 を 推 定 す る手 法 につ い て議 論 す る. Fig. 4に 示 した 例 に つ い て 考 察 す る.許 容 力 集 合Fig. 4 Estimation of observable signal sets
は,次 式 で 表 わ さ れ る. F(q)=span{f(q)} 簡 単 の た め観 測 信 号 は,力 信 号 の みか らな る と す る. この と き,観 測 可 能 な 力 信号 の集 合 は,図 に示 した ベ ク トルfsとfeで 張 られ る 凸多 面 錐 で あ る.す な わ ち,
S1= U F()
gERi=span {f S, fe}
物 体 の 姿 勢 を 変 え な が ら,ベ ク トルf(q)を 計 算 した 結 果 を,fl(l=1,2,…,L)で 表 わ す.こ の と き,次 式 が 成 り 立 つ.Si
span {fi, f2,
fL}
=F(ql) + F(q2) -F ... + F(qL)
す な わ ち集 合Siは,凸 多 面 錐F(ql)の 凸 和 で 近 似 で きる.以 上 の 考 察 か ら,連 結 領 域 上 の 凸 多 面 錐 の 合 併 集 合 は,有 限 個 の 凸 多 面 錐 の 凸 和 で近 以 で きる こ とが わ か る. (14)式 に(12)式 を 代 入 す る.接 触 状 態 が変 わ らな い 限 りNの 値 は一 定 で あ る こ とに注 意 す る と, NSi = U
U Sn(q)
n=1 gER2 集 合Sn(q)は 凸 多 面 錐 な ので,合 併 集 合U Sn~q)
(15)
gERi を,次 式 で 近 似 す る.def L S
i =
S(Q)(16)
l=1 観測 可 能 信 号 集 合 は,次 式 で 表 わ さ れ る.N
si = U S7
(17)
n=1 観 測 可能 信 号 集 合Siは,N個 の 凸 多 面 錐Sniの 合 併 集 合 で あ る.セ ンサ 信 号smが 観 測 可能 信 号Siに 含 ま れ る か否 か の判 定 は,演 算 ア ル ゴ リズ ムELEMENT-106-平 井 ・浅 田 ・得 丸:組 立 作 業 に お け る 接 触 状 態 の 識別 と識 別 手 続 き の 自動 生 成 229 を 用 い て 行 え る.凸 多 面 錐 を あ ら か じ めface形 式 に 変 換 して お け ば,こ の 判 定 で 必 要 な 演 算 は,内 積 の 計 算 と0と の 比 較 だ け で あ る. 4. 観 測 可 能 信 号 集 合 の 簡 単 化 識 別 の 際 の 計 算 量 を 減 らす た め に は,観 測 可 能 信 号 集 合 を あ ら か じ め,可 能 な 限 り 簡 単 化 し て お く必 要 が あ る.そ こ で,観 測 可 能 信 号 集 合 の 簡 単 化 に つ い て 考 察 す る. 4.1 凸 多 面 錐 の 簡 単 化 こ こ で は,凸 多 面 錐 の 簡 単 化 に つ い て 考 察 す る .
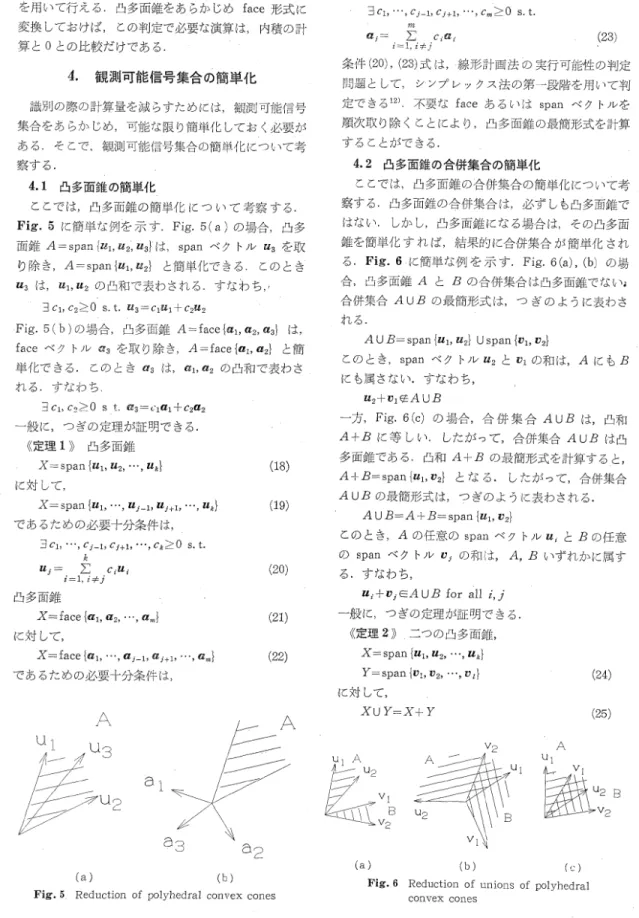
Fig. 5に 簡 単 な 例 を 示 す.Fig. 5(a)の 場 合 ,凸 多
面 錐A=span{u1,u2,u3}は,spanベ ク トルu3を 取
り 除 き,A=span{u1,u2}と 簡 単 化 で き る.こ の と ぎ
u3は,u1, u2の 凸 和 で 表 わ さ れ る.す な わ ち,
∃c1,c2≧0 s.t. u3=c1u1+c2u2
Fig. 5(b)の 場 合,凸 多 面 錐A=face{a1,a2,a3}は,
faceベ ク トルa3を 取 り 除 き,A=face{a1,a2}と 簡
単 化 で き る.こ の と きa3は,a1, a2め 凸 和 で 表 わ さ れ る.す な わ ち ∃c1,c2≧0 s .t a3=c1a1+c2a2 一 般 に,つ ぎ の 定 理 が 証 明 で き る. 《定 理1》 凸 多 面 錐 X=span.{u1,u2,…,uk} (18) に 対 し て, X=span{u1,…,uj-1,uj+1,…,uk} (19) で あ る た め の 必 要 十 分 条 件 は, 凸 多 面 錐 X=face{a1,a2,…,am} (21) に 対 し て, X=face{a1,…,aj-1,aj+1,…,am} (22) で あ る た め の 必 要 十 分 条 件 は,
Fig. 5. Reduction of polyhedral convex cones
条 件(20), (23)式 は,線 形 計 画 法 の 実 行 可 能 性 の 判 定 問 題 と して,シ ン プ レ ッ ク ス 法 の 第 一 段 階 を 用 い て 判 定 で き る12).不 要 なfaceあ る い はspanベ ク トル を 順 次 取 り 除 く こ と に よ り,凸 多 面 錐 の 最 簡 形 式 を 計 算 す る こ と が で き る. 4.2 凸 多 面 錐 の 合 併 集 合 の 簡 単 化 こ こ で は,凸 多 面 錐 の 合 併 集 合 の 簡 単 化 に つ い で 考 察 す る.凸 多 面 錐 の 合 併 集 合 は,必 ず し も 凸 多 面 錐 で は な い.し か し,凸 多 面 錐 に な る 場 合 は,そ の 凸 多 面 錐 を 簡 単 化 す れ ば,結 果 的 に 合 併 集 合 が 簡 単 化 さ れ
る.Fig. 6に 簡 単 な 例 を 示 す.Fig. 6(a), (b)の 場
合,凸 多 面 錐AとBの 合 併 集 合 は 凸 多 面 錐 で な い
合 併 集 合A∪Bの 最 簡 形 式 は,つ ぎ の よ う に 表 わ さ
れ る.
A∪B=span{u1,u2}∪span{vi,v2}
こ の と き,spanベ ク トルu2とv1の 和 は,Aに もB
に も 属 さ な い.す な わ ち, u2+v1任A∪B 一 方,Fig. 6(c)の 場 合,合 併 集 合A∪Bは,凸 和 A+Bに 等 し い.し た が っ て,合 併 集 合A∪Bは 凸 多 面 錐 で あ る.凸 和A+Bの 最 簡 形 式 を 計 算 す る と, A+B=span{u1,v2}と な る.し た が っ て,合 併 集 合 A∪Bの 最 簡 形 式 は,つ ぎ の よ う に 表 わ さ れ る . A∪B=A+B=span{u1,v2}
こ の と き,Aの 任 意 のspanベ ク トルuiとBの 任 意
のspanベ ク トルvjの 和 は,A, Bい ず れ か に 属 す
る.す な わ ち,
ui+vj∈A∪B for all i,j
一 般 に ,つ ぎ の 定 理 が 証 明 で き る. 《定 理2》 二 つ の 凸 多 面 錐, X=span{u1,u2,…,uk} Y=span{v1,v2,…,vl} (24) に 対 し て, X∪y=X+Y (25)
Fig. 6 Reduction of unions of polyhedral
230 1990年2月 計 測 自動 制 御 学 会 論 文 集 第26巻 第2号 で あ るた め の必 要 十 分 条 件 は,
ui+vj∈X∪Y for all i,j (26)
が成 り立 つ ことで あ る. この 定 理 によ り,二 つ の 凸 多 面錐 の合 併 集合 が,凸 和 に等 しい か否 か を 判 定 で き る.凸 和 に 等 しい場 合 は,定 理1を 用 いて 凸 和 を 簡 単 化 す る と,合 併 集合 が 簡 単 化 され る. 5. 識 別 手 続 き の 簡 単 化 本 章 で は,観 測 可 能 信 号 集 合 間 の 関 係 に 注 目 して, 接 触 状 態 の 識 別 手 続 き を 簡 単 化 す る.Fig. 7に 簡 単 な例 を 示 す.接 触 状 態 はNi, Njの 二 つ だ け で あ る と 仮 定 す る.観 測 可 能 信 号 集 合Siは 凸 多面 錐 で あ る と し,そ のfaceベ ク トル をak(k=1,2,…,6)と す る. この と き,接 触 状 態 がNiで あ るか 否 か を 判 定 す る ル ール は,つ ぎの よ う に表 わ さ れ る. IF sm∈face{ak│k=1,2,…,6}THEN接 触 状 態 はNi この 判 定 に は,最 大6回 の 内積 演算 が 必要 で あ る.接 触 状 態 はNi, Njの 二 つ だ け な の で,接 触 状 態 がNi であ るか 否 か の 判 定 に は,faceベ ク トルak(k=1,2, 5,6)は 不 要 で あ る.す な わ ち,a3, a4だ け が,識 別 に 必 要 なfaceベ ク トル で あ り,識 別 ル ール は,つ ぎ の よ う に簡 単 化 さ れ る.
IF sm∈face{ak│k=3,4} THEN接 触状 態 はNi
この 判 定 に必 要 な 内積 演 算 は,た か だ か2回 で あ る. 本 章 で は,こ の よ うな 識 別 ル ー ル の 簡 単 化 に つ い て 考 察 す る. 5.1 識 別 ル ー ル の 簡 単 化 可 能 条 件 接 触 状 態 がNiで あ るか 否 か を 判 定 す る ル ー ルRLi は,(1)式 で 表 わ され る.判 定 部 に お い て,集 合Si の代 わ り にS'iを 用 い た ル ー ル を,RL'iと す る,す
Fig. 7 Compact discriminant function
な わ ち,
RL'i:IF sm∈S'i THEN接 触 状 態 はNi (27)
ま ず,ル ー ルRL'iが,RLiと 等 価 で あ る た め の 条 件 を 求 め る. 条 件sm∈Siが 満 た さ れ る と き は,接 触 状 態 はNi で あ る と 判 定 し な け れ ば な ら な い.し た が っ て,sm∈ S'iが 満 た さ れ な くて は な ら な い.ま た,条 件sm〓Si, sm∈Sj(j≠i)が 満 た さ れ る と き は,接 触 状 態 はNiで な い と 判 定 しな け れ ば な らな い.し た が っ て,sm〓S'i が 満 た さ れ な くて は な らな い.以 上 ま と め る と,ル ー ルRL'iがRLiと 等 価 で あ る た め の 条 件 と し て,次 式 が 得 ら れ る. s∈Si→s∈S'i, (28) s∈Sj∩Si→s〓S'i. (29) こ れ を,識 別 ル ー ル の 簡 単 化 可 能 条 件 と よ ぶ. 5.2 凸 多 面 錐 を 識 別 す る 手 続 き の 簡 単 化 こ こ で は,二 つ の 凸 多 面 錐 を 識 別 す る ル ー ル の 簡 単 化 に つ い て 考 察 す る.接 触 状 態 は,Ni, Njの 二 つ だ け で あ る と す る.ま た,観 測 可 能 信 号 集 合Si, Sjは と も に,face形 式 の 凸 多 面 錐 で あ る と す る.凸 多 面
錐Siのfaceベ ク ト ル をa1, a2,…,amと す る.ま
た,ak以 外 のfaceベ ク トル か ら な る 凸 多 面 錐 をS'i
と す る.す な わ ち, Si=face{a1,a2,…,am}, (30) S'i=face{a1,…,ak-1,ak+1,…,am} (31) こ の と き,Si⊂S'iが 成 り 立 つ の で,集 合S'iは,条 件 (28)式 を 満 た す.し た が っ て,条 件(29)式 を 満 た す か 否 か を 調 べ れ ば 十 分 で あ る.
Fig. 7に 示 し た 例 に お い て,faceベ ク トルa3に 対
して は,aT3s>0aTls≦0(∀l≠3)を 満 た すs∈Sjが 存 在 す る.す な わ ち,faceベ ク トルa3で な け れ ば 識 別 で き な い 領 域 が 存 在 す る.し た が っ て,faceベ ク ト ルa3は 必 要 で あ る.一 方,条 件aT2S>0を 満 た す 任 意 のs∈Sjに 対 し て,条 件aT3s>0が 成 り 立 つ.す な わ ち,faceベ ク トルa2に よ っ て 識 別 さ れ る 領 域 は,別 のfaceベ ク トルa3に よ っ て 識 別 さ れ る.し た が っ て,faceベ ク トルa2は 不 要 で あ る.以 上 の 議 論 を 一 般 化 す る と,つ ぎ の 定 理 が 証 明 で き る. 《定 理3》 凸 多 面 錐Siのfaceベ ク トルakに 対 して,条 件(29)式 を 満 た す た め の 必 要 十 分 条 件 は,
∃l≠k s.t. aTls>0 for all s∈Sj s.t. aTks>0
(32) が 成 り立 つ こ と で あ る. (32)式 が 成 り 立 つ た あ の 条 件 と し て,つ ぎ の 定 理 が 証 明 で き る. 《定 理4》 集 合Si,Sjは と も に 凸 多 面 錐 で あ る と
-108-平 井 ・浅 田 ・得 丸:組 立 作 業 に お け る接 触 状 態 の 識 別 と識 別 手 続 き の 自 動生 成 231
し,Siのfaceベ ク トル をam, Sjのfaceベ ク トル
をbnで 表 わ す.凸 多 面 錐Siのfaceベ ク トルakが, 条 件(32)式 を 満 た す た め の 必 要 十 分 条 件 は, ak∈X(Si,Sj;k) (33) が 成 り 立 つ こ と で あ る.こ こ で def
X(S1, Sj ; k)- span {am(m ~ k), bn}
(34)
定 理4よ り,識 別 ル ー ル は つ ぎ の よ う に 簡 単 化 で き る.IF sm∈P(Si,Sj) THEN接 触 状 態 はNi (35)
こ こ で,
de{
P(S;, S)= face {ak 1akX(Sz,
S; ; k)}
(36)
演 算 ア ル ゴ リズ ムELEMENTを 用 い る と集 合P(Si, Sj)は,計 算 機 上 で計 算 す る ことが 可 能 で あ る. 5.3 二 つ の接 触 状 態 を識 別 す る手 続 き の 簡 単 化 観 測 可能 信 号 集 合Si, Sjは 一 般 に,凸 多 面 錐 の 合 併 集 合 で 表 わ さ れ る.す な わ ち, N si = U Si n=1 L
S; = U S;
(37)
l=1 こ こ で,集 合Sni, Sljは,凸 多 面 錐 で あ る.集 合Sjは 凸 多 面 錐 の 合 併 集 合 な の で,条 件sm∈Sniは,つ ぎ の 条 件 と 等 価 で あ る.sm∈P(Sni,Slj) for all l=1,2,…,L (38)
こ れ は ま た,つ ぎ の よ う に 表 わ さ れ る. L
SE
P(Si, S;)
(39)
l=1 集 合Siは 凸 多 面 錐 の 合 併 集 合 な の で,条 件sm∈Si は,つ ぎ の 条 件 と等 価 で あ る. ∃n s.t. sm∈Sni (40) こ れ は ま た,つ ぎ の よ う に 表 わ さ れ る. sm∈D(Si,Sj) (41) こ こ で def N LD(SI, S,) = U
n P(S7, S;)
(42)
n=1 l=1 した が って,識 別 ル ー ル は,つ ぎ の よ う に簡 単 化 さ れ る.IF sm∈D(Si,Sj) THEN接 触 状 態 はNi (43) 5.4 遷 移 可 能 性 を も と に した識 別 手 続 き の簡 単 化 あ る接 触 状 態 か ら別 の接 触 状 態 へ は,必 ず し も遷 移 可能 で はな い.し た が って,す べ て の接 触 状 態 に対 し て,識 別 ル ール を 適 用 す る必 要 はな い.本 節 で は,遷 移 可 能性 を も と に,識 別 手 続 きを 簡 単 化 す る, 接 触 状 態Niか ら遷 移 可 能 な 接 触 状 態 の集 合 を, Tiで 表 わ す.す なわ ち, Tidef={Nj│遷 移Ni→N,jが 存 在 す る} (44)
Table 2 Simplified identification procedure
直 前 の 接 触 状 態 がNiな ら ば,現 在 の 接 触 状 態 は,集
合Tiの い ず れ か の 要 素 で あ る.し た が って,現 在 の
接 触 状 態 がNjで あ る と判 定 さ れ る 条 件 は,次 式 で 表
わ さ れ る.
sm∈D(Sj,Sk) for all Nk∈Ti, k≠j (45)
こ れ は ま た,つ ぎ の よ う に 表 わ さ れ る. sm∈DS(Ni,Nj) (46) こ こ で
DS(NI, N;) =
n
D(S;, Sk)
(47)
NkETI,k~j
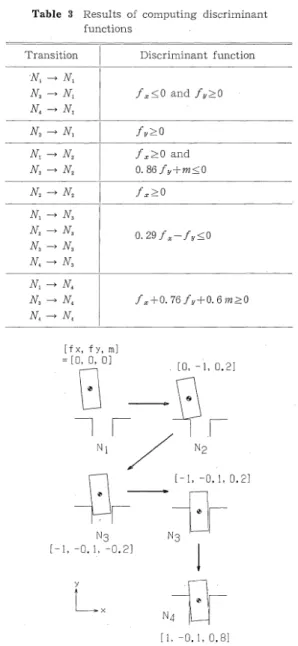
す べ て のNj∈Tiに 対 して,条 件sm∈DS(Ni,Nj)が 成 り立 つ か 否 か を 判 定 す れ ば,現 在 の接 触 状 態 を 識 別 で き る,し た が って,識 別 手 続 きは,Table 2に 示 し た よ う に簡 単 化 され る. 6. イ ン プ リメ ン テ ー シ ョ ン 前 章 で 提 案 した識 別 関数 の 計算 手 順 を,計 算 機 上 に実 装 した.使 用 した計 算 機 はmicro VAX IIで あ り,
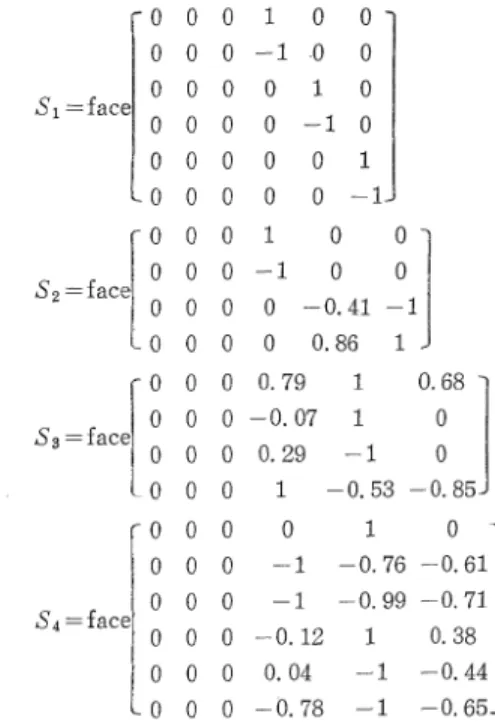
プ ログ ラ ム はC言 語 で 記 述 した.Fig. 1に 示 した 組 立 過 程 に 対 して,観 測 可 能 信 号 集 合 を計 算 した結 果 を 以
下 に示 す.行 列 の各 行 が6次 元faceベ ク トル,す な
わ ち識 別 関数 を 表 わ す.計 算 時 間 は約37秒 で あ った.
232 1990年2月 計 測 自動 制 御 学 会 論 文 集 第26巻 第2号
Table 3 Results of computing discriminant
functions
Fig. 8 Simple example of measured force
化 に要 した 時 間 は約60秒 で あ っ た.判 定 条 件 が 満 た さ れた と き,表 に示 した遷 移 が 生 じた と判 定 す る.直 前 の接 触 状 態 がN1で あ る と き,現 在 の接 触 状 態 を識 別 す る た め に は,20個 の条 件 式 が 必 要 で あ っ た.そ れ が,6個 に 減少 した こ とが わ か る.Fig. 8の 組 立 過 程 に お いて,図 に示 した.力信 号 が 観 測 さ れ た とす る.初 期 状 態N1か ら始 め,表 に 示 した 識 別 関数 を 用 い て接 触 状 態 を 識 別 し た.結 果 はN1→N2→N3→N3→N4 とな り,識 別 が 成 功 した こ とが わ か る. 7. 結 言 組 立 過 程 にお け る接 触 状 態 の 識 別 手 続 きを,モ デル に も とづ いて 自動 生 成 す る手 法 を 提 案 した.ま ず,凸 多 面 錐 の 理 論 を用 い て 識別 手 続 きを 定 式 化 し,観 測 可 能 信 号 集 合 の近 似 計 算 法 を示 した.組 立 部 品 の 幾何 モ デル か ら観 測 可 能 信 号 集 合 を 計 算 す るこ と に よ り,識 別 手 続 きが 求 あ られ る.つ ぎ に,凸 多 面 錐 の簡 単 化 ル ー ル を導 出 し,識 別 手 続 きを 簡 単 化 す る手 法 を示 した. 接 触 状 態 の 識 別 は,マ ニ ピュ レ ー シ ョ ンに お け る記 号 レベ ル フ ィ ー ドバ ック に必 要 な 基 礎 技 術 の一 つ で あ る.本 論 文 で は,モ デ ル を も と にす る ア プ ロー チ を と り,組 立 部 品 の 幾 何 モ デ ルか ら接 触 状 態 の 識 別 手 続 き を 自動 生 成 す る手 法 を 提 案 した.本 論 文 で 提 案 した 手 法 は,力 ・変 位 信 号 か ら接 触 状 態 そ の もの を 識 別 す る. この 手 法 で は,接 触 状 態 を 一 意 に決定 す る こ とが,困 難 な 場 合 が 多 い.接 触 状 態 が 遷 移 す る と き に は,力 ・ 変 位 と もに 大 き く変 化 す る.し た が って,遷 移 を 識 別 す る こ と に よ り識 別 の あ いま い さ を 減 らす こ とが で き る と考 え られ る.こ の 点 が 今 後 の研 究 課 題 で あ る. 参 考 文 献
1) D.E. Whitney: Historical Perspective and State of the Art in Robot Force Control, Int. J. Robotics Research, 6-1, 3/14 (1987)
2) M.T. Mason: Compliant Motion, M. Brady, et al., eds., Robot Motion, 305/322, Cambridge, MIT Press (1982)
3) D.E. Whitney: Quasi-Static Assembly of Compli-antly Supported Rigid Parts, ASME J. Dynamic Syst., Meas., Contr., 104, 65/77 (1982)
4) J. Rasmussen: Skills, Rules, and Knowledge; Sig-nals, Signs, and Symbols, and Other Distinctions in Human Performance Models, IEEE Trans. Sys-tems, Man, and, Cybernetics, SMC-13-3, 257/266 (1983)
5) T. Lozano-Perez, M.T. Mason and R.H. Taylor: Automatic Synthesis of Fine-Motion Strategies for Robots, Int. J. Robotics Research, 3-1, 3/24 (1984)
6) 佐 藤,平 井:遠 隔 作 業行 動 理 解 の た め の 作 業 の 状 態 表 現,第6回 日本 ロボ ッ ト学 会 学 術講 演 会 予 稿 集, 179/182 (1988) 7) 平 井,浅 田,得 丸:組 立 作 業 に お け る物 体 の接 触 状 態 遷 移 に 関 す る運 動 学 的解 析 と そ の ネ ッ トワ ー ク表 現 の 自動 生 成,計 測 自動 制 御 学 会 論 文 集, 24-4, 406/413 (1988) 8) 白 井,井 上:知 能 ロ ボ ッ ト研 究 の展 望-モ デ ル ベ ー ス ト・ ロ ボ テ ィ ク ス-,日 本 ロ ボ ッ ト学 会 誌, 5-6, 34/41 (1987) 9) 池 内,越 川:幾 何 モ デル よ り導 出 さ れ た 解 釈 木 に よ る ビ ン ピ ッキ ン グ タ ス ク 中 の 対 象 物 体 の 位 置 姿 勢 決 定,電 子 通 信学 会 論 文 誌, J70-D-1, 127/138 (1987) 10) 平 井,浅 田,得 丸:凸 多 面 錐理 論 を 用 い た マ ニ ピ ュ レ ー シ ョ ンの 運 動 学 と そ の把 握 お よ び組 立 作 業 へ の 応 用,計 測 自動 制 御 学 会 論 文 集, 24-12, 1284/1291 (1988) 11) A.J. Goldman and A.W. Tucker: Polyhedral
Con-vex Cones, H.W. Kuhn and A.W. Tucker eds., Linear Inequalities and Related Systems, Annals of Math. Studies, 38, 19/39, Princeton (1956)
12) 西 川,三 宮,茨 木:岩 波 講 座 情 報 科 学-19最 適 化,2.1
節 線 形 計 画 法,9/41,岩 波 書 店 (1982)