Kyushu University Institutional Repository
楕円型固有値問題に対する精度保証付き数値計算と その応用
長藤, かおり
Graduate School of Mathematics, Kyushu University
https://doi.org/10.11501/3150928
出版情報:Kyushu University, 1998, 博士(数理学), 課程博士 バージョン:
権利関係:
0
Verified numerical computation for elliptic eigenvalue problems and its applications
by Kaori N agatou
Contents
1 Introduction
2 Enclosing method for eigenvalues with uniqueness property 2.1 Proble1n and the fixed point formulation
2.2 Verification conditions . . . . . . . . 2.3 Algorithm in a co1nputer . . . . 2.4 Uniqueness of the enclosed eigenvalue
3 Excluding method for eigenvalues 3.1 Motivation . . . .
3.2 Verification conditions . 3.3 Algorithm in a computer
4 Applications to nonlinear elliptic problems
4.1 Statement of the proble1n and the fixed point formulation . 4.2 Verification conditions . . . . . . . . .
4.3 Estimation of constants and algorithm 5 Numerical examples
6 Conclusions Appendix References
1
2 2 5 9 15
23 23 24 26
31 31 34 35 38 46 47 51
and its applications
Kaori N agatou
Graduate School of Mathematics, Kyushu University Fukuoka
812-8581,
Japan1 Introduction
Several numerical methods have been proposed to verify the exact eigenvalues for infi
nite dimensional eigenvalue problems, and in particular the eigenvalues of elliptic operators
( cf.[2],[15, 16]).
In[2],
the method is presented to find the upper and lower bounds for eigenvalues by using some test functions, the Rayleigh-Ritz method and the Temple quotient. In
[15, 16],
given problems are connected with a simple problem, whose explicit eigenvalues are known, by using homotopy method. In this paper, we give a technique that is different from these method. This method is based on the verification method appearing in[25],
which is a realization,including uniqueness,of the method studied in[9-14]
applicable to nonlinear elliptic boundary value problems.In Section
2
we apply the numerical method described in[25]
to our eigenvalue problems.Using this 1nethod we can confinn local uniqueness of
eigenpairs (i.e.
pairs of eigenvalues and corresponding eigenfunctions) in a certain set. In the last part of that section, we also confirm the local uniqueness separately of eigenvalues and eigenfunctions as well as the simplicity of the eigenvalues.In section 3 we describe a n1ethod to exclude eigenvalues in order to obtain some informations about index. By this method we can separate the simple eigenvalues and we can also obtain the bound for the Eigenvalue with Smallest Absolute Value
(
ESAV)
. This bound plays an important role for rigorous esti1nates of the nonn of the linearized operator of some nonlinear differential equations, which is described in Section4
in detail.In Section
5
several nu1nerical exan1ples are presented.2 Enclosing method for eigenvalues with uniqueness property
In this section, we consider a nun1erical technique to verify the exact eigenvalues and eigen
functions of second-order elliptic operators in son1e neighborhood of their approximations.
This technique is based on
[25]
using the l(rawczyk-like operator and the error estin1ates for the C0 finite element solution. We nun1erically construct a set containing solutions which satisfies the hypothesis of Banach's fixed point theorem for con1pact n1ap on a certain Sobolev space.2.1 Problem and the fixed point formulation
In what follows, let
n
be a bounded convex domain in R2 and for some integer m, letHm(n)
denote the L2-Sobolev space of order m on
n.
Then, defineHJ(n) = { v
EH1(n) I v
=0
onan}
with the inner product< 'U,V>Hl= (\7u, \7v)L2
for 'U,V EHJ(n),
and the normlluiiHl - IIVull£2
for 'U EHJ(D.),
where(·, ·)£2
0 andII· 11£2
represent the inner product and0
the norm on L2
(D)
, respectively.Now, let Sh be a finite dimensional subspace of
HJ(D)
that depends onh (0
<h
<1).
Usually, Sh is taken to be a finite element subspace with n1esh size
h.
Also, let Pho :HJ(n)
� Sh denote the HJ
-projection defined byWe now assume the following approximation property in Sh.
Assumption 1. For any
u
EH
2(
0) n HJ(O),
(2.1)
where
Here, C1 is a positiv , numerically determined constant which is independent of
h.
The following lemma is well known
[3].
following Poisson equation:
{ -�¢
= rtjJ inn
¢
= 0 on ao.(2.2)
Furthermore, there exists a positive constant C2 satisfying
(2.3)
In particular, if
fJ
is a convex polygonal domain, we can setC2
= 1([3]).
We consider the self-adjoint eigenvalue problem
{
-�u + qu =AU
inn,
u
= 0 onan, (2.4)
where q E
L00(fJ).
Since we wish to enclose eigenpairs of this problem, we consider the spaceHJ(n)
x R and define the inner product < ·, · > HJ xR 0 and the normII
·II
HI xR 0 byrespectively, where
wi
=(ui, Ai)
EHJ(D)
x R(
i = 1,2)
andw
=(
u,A)
EHJ(D)
x R.Moreover, let 10 and I be the identity map on
HJ(D)
andHJ(D)
x R, respectively.vVe first nonnalize the problen1
(2.4)
as find(u, A)
EHJ(n)
x R s.t.(2.5)
We then define the projection ph :
HJ(n)
X R ----* sh X R byNow, let Wh
=(uh, �h)
Es h
X Rbe a finite element solution of (2.5); that is,
(2.6)
We used the interval library
PROFILto enclose this solution in very small intervals ( cf. [4) and Section 5).
Vve will verify the existence of eigenvalues and eigenfunctions for (2.5) in
aneighborhood of ('u, :\h) satisfying
0
in n,
0
on an. (2.7)
Note that u
EH2(n) n HJ(n), and wh
=Ph(u, �h)· We then have, by (2.5) and (2.7),
(2.8)
Defining VI
=u - uh, we see that VI
Est' where st represents the orthogonal complement of Sh in HJ(n), and we can write
It is known that the
a posterioriestimates are, in general, much better than the
a prioriestimates, provided that the higher order base functions in sh are utilized (see [24) for details). Therefore, we use
a posterioriestimates for VI as below.
Let S'h
CHI(n) be a finite element subspace whose basis consists of the union of the basis on
sh and the base functions having nonzero values on the boundary an. Define fJuh
ES'h
XS'h, a vector function in two din1ension, by the L2-projection of \luh
EL2( n )
xL2( n ) to S'h
xS'h.
Then, define iiuh
EL2(n) b:v iiuh
= \1· Vuh. We then obtain the following estimation ( cf. [24]):
where Co
=CI C2. Note that in this estimation we used the L2-estimate of VI:
�ow, in order to verify solutions
(fi, -A)
of( 2
.5)
near('il, :\h),
writing_.__ �
u
= u +u , )..
=)..h
+ :>.., we can rewrite(2.8)
as(�h
+�- q)(u
+fih
+ vl)
-(�h- q)fih,
1.
Thus using the following compact 1nap on
HJ(D.)
x RF(U).)
=( ( -�)-1{ cs:h
+3:- q)(U
+uh
+ Vj)
-();h- q)Uh} '
3:
+in (U
+uh
+ Vj)
2 dx -1 ) ' (2.9)
where
( -�)-1
is the solution operator for the Poisson equation with homogeneous boundary conditions, we have the fixed point equationw
=F(w) (2.10)
for
w
=(u, �).
2.2 Verification conditions
We now make the following assun1ption.
Assumption 2. Set
p
=(
-u1,0)
and defineF'(p)
as the Frechet derivative ofF atp.
Assun1e that the restriction to
sh
X R of the operatorPh[!- F'(p)]
:HJ(D.)
X R ----+sh
X R has the inverseThe validity of this assumption can be numerically checked in actual computations.
�ow as in
[13, 14),
we de ·on1po e(2.10)
into finite and infinite dimensional parts:(2.11)
We use a Newton-like method only for the finite dimensional part, represented by the first equation in
(2.11).
First, we define the Kewton-like operatorWe next define the operator
T: HJ(D.)
x R ----tHJ(D.)
x R asT(w) Nh(w) +(I- Ph)F(w).
Then
T
becomes a compact map onHJ (D.)
x R, and the relationw
=T(w)
<===} w =F(w)
holds.
Now, an arbitrary element
w
EHJ(D.)
x R can be uniquely written aswith
M
Vh =
L Vj¢j, j=l
(2.12)
(2.13)
(2.14)
where M =dim Sh,
{¢1}�1
is a basis of Sh,(vj ) f= 1
a real vector. For win(2.14)
we use the following notation:( w )i (w)M+l (w)M+2
lvi l , i
=1, ..
. , M,llvj_IIH1,
01111·
We intend to find a fixed point to
(2.10)
in a setW,
referred to as a 'candidate set'. Given a vector(WI, ... , WM+2)t
such that Wi >0 (i
=1,
... , M+ 2),
its candidate setW
is defined byI\ow let
T'
be the Frechet derivative ofT. By the method described below we choose two vectors(Y1, ... , YM+2)t, li
>0 (i
=1, .. .
, M +2)
and(Z1, ... , Zu+2)t, Zi
>0 (i
=1,
... , M +2)
such that
(T(O))i
<}i, i =1, . ..
,M+2 ,
(T'(wl)w2)i
<Zi, i
=1,
... , M +2,
for anyw1, w2 E
W.The verification condition is described in the following theorem.
Theorem 1. If a candidate set W defined
by {2.15)
satisfiesYi +
zi
<wi ( i
=1,
... , M +2),
then there exists a fixed point ofT in
K =
{
vE H 6 ( n)
x R1 (
v) i
::; li +zi ( i
=1, ..
. , M +2)}.
Moreover, this fixed point is unique within the set W.
In order to prove this theorem, we derive two preliminary lemmas.
Defining the norm
II
·llw
byllxll w- l�i�M+2 wi '
= max(x )i x E HJ(fl)
X R,we have the following lemma.
Lemma 2. For each
x E HJ(n)
x R,sup
IIT'(w)xllw::;
rpaxw zi llxllw·
wEW
l�t�M +2 i
Proof.
Since W includes a ball centered at
0
andT'(w)
is linear,forx E HJ(n)
x R,sup
IIT'(w)xllw
=llxllw
supII T'(w) - ll xll II
wEW wEW X W W
(2. 16) (2.17)
(2.18)
(2.19)
(2.20)
holds. Then, by the definition of
II
·llw,
we see thatllxlJw
E Wand this impliessup
II'( T w ) x
--II <
1nax -zi
.wEW llxllw W- l::;i::;M+2
WiThis proves the lemma.
1
IIT(wl)- T(w2)11w::;
supIIT'(sw1
+(1- s)w2)(w1- w2)11w
sE[O,l]
Proof.
Defining
T(s)
=T(sw1
+(1- s)w2),
apply the mean value theorem to obtain the desired conclusion.
1
(2.21)
With these two lemmas, we can now prove Theorem
1.
As usual, we define the imageJ (
V)
of an arbitrary operator
J
and arbitrary set V asJ(V) {J(v)lv
EV}.
Proof of Theorem 1.
We first prove that
T(W)
C W. By(2.17)
and Lemma 3,(T(w)- T(O))i::;
sup(T'(sw)w)i ::; Zi
for allwE
WsE[O,l]
holds. Hence, we have
(T(w))i < (T(O))i
+(T(w)- T(O))i
< Yi
+zi
<
wi ,
from which we obtain
T(w) E
W.T(W)
cW.
We next prove that, for son1e
0
< /;, <1,
for all
w1, w2
E W.Since W is convex, by Len11nas
2
and 3 we haveIIT(w2)- T(wdllw
<<
<
sup
IIT'(sw2 + (1- s)wl)(w2- wl)llw
sE[O,l]
sup
IIT'(w3)(w2- wl)llw
W3EW
Thus, Yi
> 0 (i
== 1, .. , M+ 2)
and(2.18)
imply zi zi +Yi
3(
.)
- <
::; k
<1
z == 1, ... , M +2 .
wi wi
Therefore, applying Banach's fixed point theorem to T, the theorem is proved.
1
2.3 Algorithm in
acomputer
In what follows, we describe the procedure to choose vectors
(Y1, ... , YM+2/,
Yi> 0 (i
==1,
... , M +2),
and(Z1, ... , ZM+2)t, Zi > 0 (i
==1,
... , M+ 2),
satisfying(2.16)
and(2.17),
respectively.
As usual, we define the absolute value of any interval
A
asSince
IAI
=maxlal.
aEA
T(O) Nh(O) +(I- Ph)F(O)
-[I- F'(p)]h1( -PhF(O)) +(I- Ph)F(O) [I- F'(p)]h1PhF(O) +(I- Ph)F(O)
holds for
1r1,
... y· M and }'M +2 we fir t determine the interval vector(Yi,
... , Y M, Y M +2)t
sati fying
(2.22)
It is then sufficient to set
Yi
==IYil (
i ==1, ... , M,
NJ +2). (2.23)
To determine the interval vector
(Y1, ... , YM, YM+2)t
satisfying(2.22),
we consider the setY
CS h
x R such thaty
�{ y
Esh
X RI
for all i =1,
... , M +1,
<
[I� F'(p)]hy,
<T>; >HJ
xR=<PhF(O),
<T>; >HJ
xR}, (2.24)
where
[I- F'(p)]h
represents the restriction toSh
x R of the operatorPh[!- F'(p)]
and we have used the basis<I>l, ... , <I>M+l
of sh X R given by<I>
i = (cPi,0)
(i ==1, ... , M), <I>M+l (0, 1).
Clearly,
Y
coincides withPhT(O).
In the actual computation, as shown below, we can obtain the interval hull ofY
(denoted byI Y I )
by solving the linear system of equations in(2.24).
Then
(Y1, ... , YM, YM+2r
can be determined asObserve that for <I>i
(1
:S i :SM)
andy ('2:�1 Y j
cPj , YM+2),
we haveand for
<I> M+l,
Moreover for <Pi,
1 ::;
i::;
i\1!,(2.25)
(2.26)
(2.27)
(2.29)
Now, in order to obtain the set
/
Y/
we define the(M + 1)
x(M + 1)
matrix G =(gij)l�i,j�M+l
by
9ij 9i,M+1 9M+1,j
(V¢i , V¢j) + (¢i , q¢j)- )..h(¢i , ¢j) (1 � i,j � M), -(uh , ¢i) (1 � i � M),
-2(uh , ¢j) (1 � j � M), 9M+1,M+1
0,and the interval vector r
([-ri, ri])f!{1
byr; =
I JP h- q)vdl; dxl (i
=1, ... , M),
(2.30)
Here, G is invertible by Assumption
2.
Then, the interval vector(Yi,
..
., YM, YM+2)t
in(2.25)
are determined by
We can estimate Y
M +l
by using the following inequalityII(J- Ph)T(O)iiHJxR II(!- Ph)F(O)iiHJxR
II(Io- Pho){( -.6)-1()..h- q)v1}IIH1
0<
Cohll (Xh - q)v1ll£2,
which is derived from Assumption
1
and Lemma1;
that is we can set(2.31)
(2.32)
Next, we choose a vector
(ZI, ... , ZM+2)t
satisfying(2.17).
Since
T'(wi)w2
==N�(wi)w2 +(I- Ph)F'(wi)w2
==
[I- F'(p)]hi Ph(F'(wi)w2- F'(p)Phw2) +(I- Ph)F'(wi)w2
holds, for
ZI, ... , ZM
andZM+2
we first determine the interval vector(ZI, ... , ZM, ZM+2)t
for allWI, w2
E W satisfyingPhT'( wi)w2 [I- F'(p )]hi Ph(F'( wi)w2- F'(p )Phw2)
and then set
c
(t Zj</Yj, ZM+2 ) ' ]=I
(i
==1, . . . ,M,M +2).
(2.33)
(2.34)
To determine the interval vector
(ZI, ... , ZM, ZM+2)t
satisfying(2.33),
we consider the set Z C Sh
x R such thatz =
{ z
Esh
X RI
there existWj,W2
E w such that, for alli
=1, .. . ,M + 1,
<[I- F'(p)]hz,
<I>i >HlxR 0.
= < Ph(F'( wl)w2- F'(p)Phw2),
il>; > HJ xR}· (2.35)
In analogy to our treatment of Y, we can obtain the interval hull of Z
(
denoted by0)
by solving the linear system of equations in(2.35)
using the interval right-hand side, as we now do.Observe that for <I>i
(1
�i
�M)
and for allWI, w2
E W, we haveand for <I>
M +I,
(2.36)
where we have written
Wi
=(ui,Ai),ui
EHJ(D), .Ai
E R(i
=1,2).
Therefore, in order to obtain the set
I
ZI,
we use the matrix G determined by(2.30)
and the interval vector r([ -ri, ri])f!i
1 for whichr;
= sup.IJ (�h- q){(Io- Pho)u2}¢;
dx c Uj ,.xj )EW(1=1,2) n+ Jn (.\1 u2
+>.2( u1 +vi))¢;
dxl
,Then we set
We can also estimate
Z M +l
by using the inequalitythat is, we can set
II (!- Ph)F'(w1)w2IIH1xR
0<
Cohll(:\h + -A1- q)u2 + .A2(u1 +
v1 +uh)ll£2;
ZM+l ==
supCohll(:\h
+A1- q)u2 +
-A2(
u1+ v1
+uh)ll£2.
(ui,Ai)EW (i=1,2)
(2.38)
(2.39)
Now, we describe an algorithm for finding a vector
(W1, .. , WM+l, WM+2)t
which satisfies the verification condition(2.18).
Since(Zi)f!i2
depends onW,
we writeZi
asZi(W).
We use the following iteration method.Algorithm.
1.
Fix a maximum iteration number.2.
Find a vector(Y1, ... , YM+2)t
satisfying(2.16).
3.
SetWi
�Yi (i
=1,
... ,M+2).
4. Find a vector
(Z
1(
W) ... ZM+2(W)Y
satisfying(2.17).
5. Check the verification condition
(2.18);
Yi+Zi(W)<Wi (i=1, ... ,M+2).
If the condition is satisfied, then the verification has succeeded.
If not, set
Wi�(1+8)(Yi+Zi) (i=1, ... ,M+2),
where
8 (0 < 8
<<1)
represents an inflation para1neter( cf. [19],[23]
etc.)
, increase the iteration number by1,
and return to step4.
6. If the maximum iteration number is exceeded without
(2.18)
being satisfied, the verification has failed.Now assume that a set
W
satisfying the hypothesis in Theorem1
exists. We defineui
=wi (i = 1, ... , M + 1), Ao
=wM+2
and set
where
with
u A
{ u E
HJ ( n) 1 ( u) i � ui (
i= 1, ... , M + 1)}, {A E
RI I A I � Ao},
( u )i ( u)M+l
l u i I,
i= 1,
... , M,lluj_IIHJ,
M M
u =I: uj¢j + u_1_, I: uj¢j E sh, u_1_ Est.
j=l j=l
Then we have
W =
U xA.
(2.40)
(2.41) (2.42)
By Theorem
1
we are able to confirm the local uniqueness of an eigenpair in U x A. But this does not imply directly that the eigenvalue is unique inA,
because there may exist another eigenvalue inA
corresponding to an eigenfunction in a set U' which is different from U.We therefore must show the local uniqueness individually for each eigenvalue and eigenfunc
tion in
A
and U, respectively.Let
U, A
and W be the sets defined at the end of the previous subsection. Our aim in this subsection is to prove the uniqueness of an eigenvalue inA
and of an eigenfunction inU
separately. We denote the operator T :
HJ(D)
x R �HJ(D)
x R defined by(2.12)
as(2.43)
where T1 and T2 are operators such that
(2.44) (2.45)
For a fixed A E
A,
define(2.46)
Because of the compactness ofT, P>.. is also a compact map on
HJ(D).
If(2.18)
holds, then we havep
>..( u)
E in t( U)
for allu
EU.
Now, for
v
EHJ(D),
we writeM
v
=L vj¢j
+v
_1_,j=l
where
E�l Vj¢j
Esh,
Vj_ Est'
and define the normII
.llu
byWe then have the following lemma.
(2.47)
(2.48)
Lemma 4.
There exists a fixed point of
P>..in U for each
A EA, and this fixed point is
unique in U. Moreover, when we denote this fixed point as
U>..,the equality
holds.
Proof.
In the proof of Theorem 1, we proved that, for some
0
< k < 1,Hence, for any
w1
=(u1,A),w2
=(u2,A)
in W, we haveBy definition, it follows that
II
T( u2, A)
- T( u 1 , A) II
wand that
Hence, for all
u1, u2
E U and for the above k, we have(2.49)
(2.50)
By
(2.4
7) and(2.50),
we can use Banach's fixed point theorem for P>..· Thus the first part of the lemma is proved.Denoting the above fixed point as
u;..,
we next prove(PhoTl(u,A),T2(u,A))
=(Phou,A)
-[I- F'(p)]h1{Ph(u, -\)- PhF(u, A)}
for
(u, ,\)
EHJ(D.)
x R. Then, making use of the relationP>..(u)
=T1(u, A)
we can rewrite the above equality asComparing the second components on each side of this equality, we have
In the case
u
=U>..,
we haveU>..- P>..(u>..)
= 0, which proves the second part of the lemma.1
Now, we obtain the following lemma, which is needed in the proof of the local uniqueness of eigenvalues.
Lemma 5. Assume that
(2.18)
in Theorem1
holds and let(u*-
u,A*- �h)
be a fixed point ofT (i.e.(u*, A*)
be an eigenpair for(2.5)). I
fA*- �h
E A, then eitheru*-
u E U or-u*
- u E U holds.Proof.
Since there exists a fixed point of p>..·->:h in U and this fixed point is unique in it by Lemma 4, we write this fixed point as
v
and definev*
byv*
=v
+ u. In what follows we assume that u*f= ±v*.
Since
holds by Lemma 4, defining
- r * *
dK =
}n, U
V X,we have
1�<:1
=lin u*v* dxl :'S: llu*IIL' llv*ll£2
= 1by Schwarz' inequality. Equality here holds only in the case
u*
=±v*.
Hence our assumptionu* :f. ±v*
impliesJ K:J :f.
1.Now, for each
t
E R we defineg(t)
=�(t)u*
+TJ(t)v*, (2.51)
where the functions
�(t)
andrJ(t)
are defined by�(t)
=_ 1
_ (
cost + sint ) ,TJ(t)
= _1
_(
cost _ sint)
.Vi v"f+K � Vi v"f+K �
Then we obtain
by a straightforward calculation. Moreover, we can prove that
g(t) -
il is a fixed point of p>.•-'Ah for allt
E R through some simple calculations. In particular, we haveSince
g(t)
is continuous int
and not constant aroundt1,
and since the fixed point of p>.•-).h exists in the interior of U by(2.4 7),
there exists a real numbert* :f. t1
sufficiently close tot1
satisfying
g(t*)-
il:f. v
andg(t*)-
il E U.This contradicts the uniqueness of the fixed point of p>.•-).h in U. Consequently,
u*
=v*
oru*
=-v*,
which implies
u*
- il E U or- u*
- il E U.Moreover, if both
u*-
il E U and-u*-
il E U hold, then bothu*
and-u*
are eigenfunctions corresponding to the eigenvalueA*
and satisfyIn( u*)2
dx =In( -u*)2
dx =1.
Therefore, both( u*
- il, ,.\* - X
h)
and( -u* -
il,A*
-X
h)
are fixed points ofT in U x A. Hence Theorem1
leads us to
u*
=-u*,
and thereforeu*
= 0. This is a contradiction. Thus we find thatIn a similar manner, we can also show that
-u*
- u E U ===?u*
- u�
U.Therefore the lemma is proved.
1
We next prove two additional lemmas, which are needed in the proof of the local uniqueness of eigenfunctions.
For a fixed
u
E U, definewhere T2 is the same as in ( 2.43). Then ( 2.18) yields
Pu(A)
E int(A) for allA
E A.We have the following lemma.
(2.52)
(2.53)
Lemma 6.
There exists a fixed point of Pu in
Afor each u
E U,and this fixed point is unique in
A.Proof.
In the proof of Theorem 1 we proved that, for some 0 < k < 1, for all w1, w2 E W.
Therefore, for any w1 = (
u, AI), w2
= (u, A2)
in W we haveObserve that, by definition, we have
and
Hence for all
A1, A2 E
A and for the above k, we have(2.54)
Since we can again use Banach's fixed point theorem for Pu, by
(2.53)
and(2.54)
the lemma is proved.1
With this result we are able to prove the following lemma.
Lemma 7.
Assume that ( 2.18) in Theorem 1 holds and let ( u * - u, A* - �h) be a fixed point ofT. Ifu*- u E U, then we have .A*- �hE
A.Proof.
We denote a fix�d point of Pu•-u in A by
p,,
which is unique in A by Lemma 6, and definep,*
byp,*
==p,
+.Ah.
Assume that
A* - �h f.
p, holds. Definingv( t)
for eacht E
R asv(t)
=(1- t).A*
+t
p,*
,through some simple calculations we can find that
v(t) - �h
is a fixed point of Pu•-u for allt E
R. In particular,v( 1) == p,*.
Since the fixed point of Pu•-u exists in the interior of A by(2.53),
by the property ofv(t)
there exists a real numbert** f. 1
sufficiently close to 1 such thatv( t**) - �h f. p,
andv( t**) - �h E
A.This contradicts the uniqueness of the fixed point of Pu•-u in A. Therefore we have
and the lemma is proved.
1
From Theorem
1,
and Lemmas5
and 7 we can obtain the following theorem which is the main result of this section.Theorem 2.
If a set
W ==U
x Asatisfies the conditions in Theorem 1, then we have
i)
31u* eigenfunction s. t. u* - E Jn ( u*)2
ii)
31A* eigenvalue s.t. A* - �hE
A, iii) F( u * -
u,A* - �h)
=( u * -
u,A* - �h),
iv)
A* : geometric simple eigenvalue.
Proof.
i) The existence of the eigenfunction
u*
satisfyingu*-
uE
U andfn( u*)2
dx =1 is confirmed by Theorem 1. We now prove its uniqueness.Assume that there exists an eigenfunction
v*
which is distinct fromu*
and satisfiesv*-
uE
Uand
fn( v*)2
dx = 1. LetA*
andJ.-L*
be the eigenvalues corresponding to the eigenfunctionsu*
andv*,
respectively. Then by Lemma 7 we haveA* - �h
andJ.-L* - �h E
A. Therefore Theorem 1 impliesA*
=J.-L*
andu*
=v*,
which is a contradiction.
ii) Since we can show the existence of the eigenvalue
A*
satisfyingA*-Ah E
A by Theorem 1, we need only prove its uniqueness.Assume that there exists another eigenvalue
J.-L*
which is not equal toA*
and satisfiesJ.-L*-�h E
A. Then the normalized eigenfunction
v*
corresponding toJ.-L*
satisfies eitherv* -
uE
U or-v* -
uE
U by Lemma 5. Similarly, the normalized eigenfunction corresponding toA*
also satisfies eitheru*
- uE
U or-u* -
uE
U. HenceJ.-L*
=A*
holds by Theorem 1, which is a contradiction.iii) It is obvious by Theorem 1, and i) and ii) above.
iv) Assuming that
A*
is not geometric simple, there exist two eigenfunctions which correspond toA*
and are linearly independent. We can normalize these eigenfunctions byNote that
u*
andv*
are also linearly independent after normalization. We then have bothu* -
u E U or- u*
- uE
Uand
v* - u E U or -v* -u E U
by Lemma 5. Therefore Theorem 1 leads us to conclude that either u* = v* or u* = -v*.
However, this contradicts the linear independent nature of u* and v*.
1
3.1 Motivation
In this section, we will mention about a verification method of
excluding
eigenvalues. One of the reason why we need to exclude eigenvalues is that we want to know some indices of eigenvalues. Although we can enclose some eigenvalues by the method described in Section2,
we can obtain nothing about its indices. In order to obtain some informations about indices, we need to check that an interval contains no eigenvalues.The other reason is an application to the verification of the solutions for the following nonlinear elliptic boundary value problems
( cf. [12])
:{ -
�u
==f ( u)
inn'
u
== 0 on an,(3.1)
where some appropriate assumptions are given on the nonlinear map
f.
SettingF0
=( -
�)-1 f,
we can rewrite(3.1)
as the fixed point equation:u ==F0(u)
onHJ(n).
Our verification process is based upon the following Newton-like method to
(10- F0)(u)
== 0:where
F�( uh)
is the Frechet derivative ofFo
at the approximate solutionuh.
Up to now, instead of estimating[10- F�(uh)]-1
directly, we divided(10- F0)(u)
== 0 into finite and infinite dimensional parts, and we used the Newton-like method only in the former part.But if we estimate ESAV of the following eigenvalue problems
that is,
(3.2)
then we can directly estimate
[10- FMuh)]-1.
�amely, setting q ==-f'(uh)
in(2.4),
if we verify the ESAV, we can apply the �ewton-like method to the infinite dimensional problems(
cf. [17]).
In order to estimate the ESAV rigorously, we use the verified estimation of the bound of it by excluding eiganvalues.3.2 Verification conditions
Now, for
q
EL00(D.),
we consider the following self-adjoint eigenvalue problem:{
-6.u
+qu
== )..u
in n'u ==
0 on an.(3.3)
In order to estimate the ESAV, we consider whether or not a given interval contains any eigenvalues of
(3.3).
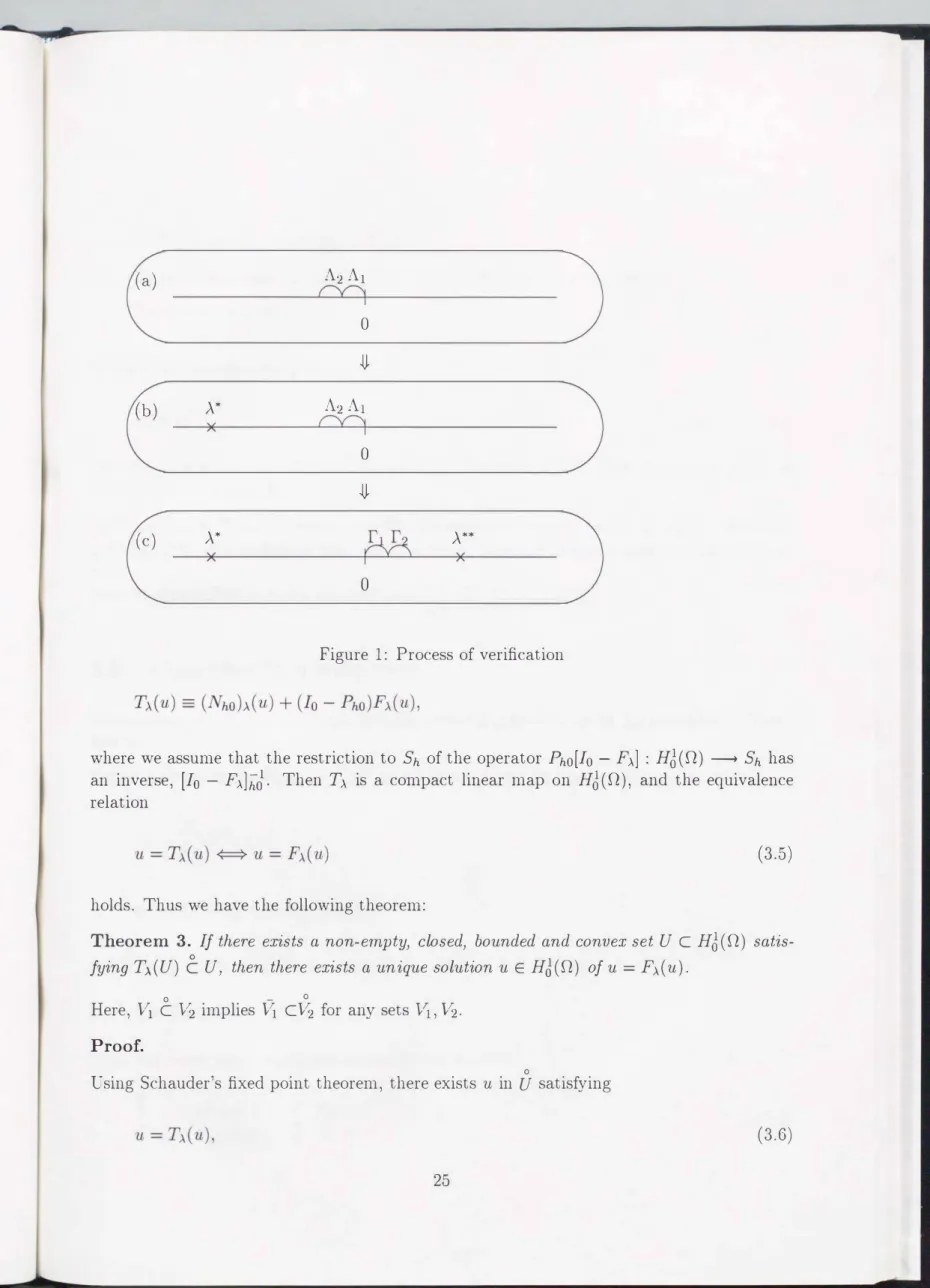
First, we assume that the ESAV is negative and we begin a procedure to determine a bound of ESAV moving from zero in the negative direction.We consider a sufficiently narrow interval A
i
==( ai, ai-d,
whereai ( i � 1)
are negative real numbers anda0 ==
0 (see Figure1
(a)). For a fixedi
and ).. E Ai, we consider(3.3)
as the second-order elliptic boundary value problem. Then(3.3)
has a trivial solutionu ==
0.Therefore, for any ).. E Ai, if we validate the uniqueness of the solution in
(3.3)
by the method described below, it implies that ).. is not an eigenvalue of(3.3);
that is, there is no eigenvalue of(3.3)
in Ai. If we fail to validate the uniqueness in an interval Aj , then we set).* _ infAj_1 (see Figure1
(b)). Next, we start this procedure from zero and move the positive direction. In this case, if we fail to validate the uniqueness in an interval rk, then we set ).. ** su pr k-1 (see Figure 1 (c)). Note that we can terminate this process when moving in the positive direction after infr1 > l-\*1 for some interval r1. By comparing the absolute value of ).. *and ). **, we can determine a lower bound for the ESAV.If we fail to validate the uniqueness of the solution
u ==
0 in interval A1 or interval r 1, this implies that we could not get a bound of the ESAV as positive values. In this case, we must refine our method, for example, using a smaller mesh size or higher order base functions in Sh, etc. However, there is the possibility that(3.3)
really has 0 as an eigenvalue in such a case.Now, we describe a method to validate the uniqueness of solutions to
(3.3)
for a fixed ).. E Ai
. Using the compact map onHJ(D.)
we can rewrite
(3.3)
as(3.4)
Then we set
0
JJ-
(b)
_\* A2 A10
JJ-
(
c) _\*�
_\**)( X
0
Figure 1: Process of verification
where we assume that the restriction to
Sh
of the operatorPho[Io- F"-] : HJ(D)
----+Sh
has an inverse,[!0
-F"-]h"J.
Then T"- is a compact linear map onHJ(D),
and the equivalence relation(3.5)
holds. Thus we have the following theorem:
Theorem 3.
If there exists a non-empty) closed) bounded and convex set
U CHJ(D) satis
fying
T;..(U)C
U7then there exists a unique solution u
EHJ(D) of u
=F"-(u).
0 - 0
Here, V1 c V2 implies V1 cV2 for any sets Vi, V2.
Proof.
Using Schauder's fixed point theorem, there exists
u
in U satisfying 0(3.6)
and by
(3.5)
it is equivalent tou
=F>. ( u).
Since
T>.
is a linear operator and T>-.( u)
= u holds, for anyc E
R we havecu. (3.7)
If
u
# 0, we can choosec E
R satisfyingcuE au.
But this contradicts with
T>.(U)
C 0U
and(3.7).
Thereforeu
= 0. That is,u
= 0 is a unique solution ofu
=F>.(u). I
By Theorem
3,
if there exists a closed, bounded and convex setU
CHJ(D.)
satisfyingU T>-.U C U
then it follows that the interval Ai contains no eigenvalues of(3.3).
We use>-.EAi
interval approaches to verify the condition
U T>-.U C U (cf.[14]).
>-EAi
3.3 Algorithm in
acomputer
We now describe the actual computational procedures used to verify the condition in Theo
rem
3.
For an interval vector
Bo
=(BJ0))'f=1
and a strictly positive real numbera0,
we writewhere M = dim
Sh , { ¢j }'f=1
is a basis ofSh.
And we defineU
asThen the verification conditions are written as follows:
{ (Nho)>-.(U) c uh
(Io- Pho)F>.(U) c U1_. (3.8)
M
L B1¢1
:J(Nho)>.U
j=l
and a real number a defined by
a=
Coh
supII(..\- q)viiL2
vEU satisfy the conditions
(3.9)
(3.10)
then the verification conditions
(3.8)
are satisfied, and there exists a unique solution of(3.3)
in
U
for a fixed ,.\ EAi.
Note that the inclusion in the former part of(3.10)
is meant componentwise.Next we derive a necessary and sufficient condition for
(3.10)
which is simpler than(3.10).
If
q
= ..\,(3.3)
has the only solution u ==0.
Therefore we assume thatq t
..\.If we represent an element
v
inU
asV
==Vh
+v 1_
forVh
EUh
andV
1_ EU 1_,
we haveThat is,
( N hO) >. ( v h
+v j_)
Pho(vh
+v1_)- [Io- F>.]h5(Pho(vh
+v1_)- PhoF>.(vh
+v1_)) vh- [Io- F>.]h5(vh- PhoF>.(vh
+v1_)).
[Io- F>.]hovh- (vh- PhoF>.(vh
+v1_) ) PhoF>. ( vh
+v 1_ ) - PhoF>. ( vh)
PhoF>.( v1_). (3.11)
To calculate the interval vector
(B1 )�1
satisfy
ing(3.9),
we consider a set X such thatX =
{X
Esh I
there exist Vj_ E uj_ such that, for all i =1,
... , M,<
[Io- F>.]hox,q)i
>H1==< 0PhoF>.(vl_),¢i
>H10}
.(3.12)
In an actual computation, as shown below, we can obtain the interval hull of X
(
denoted byI
XI )
by solving the linear system of equations in(3.12)
using the interval right-hand side.Therefore we can set
M
L:Bj¢j
=W
.(3.13)
j=l
Observe that for
¢i (1 :::;
i:::; Jvf)
andx
=L:f=1 xi¢],
we have(3.14)
and for all V1_ E U1_,
(3.15)
Therefore, in order to obtain the set
I
XI,
we define theM
xM
matrix QC>..)(g � ))1::;i,j::;M,
which is dependent on
A,
byg s A)
=(\l¢i , \l¢j)£2 + (¢i , q¢j)£2-,\(¢i , ¢j)£2 (1::;
i ,j:::; M)
and the interval vector
r
bySince we supposed that
[Io -FJ\]hl
exists,G(J\)
is invertible. Then, the interval coefficientsB1
in(3.9)
are determined by(3.16)
Note that B is obtained as the interval hull of the set
{ x
ERM I G(J\)x
=a0r,
for allr
Er}
by the usual interval arithmetic. We can estirnate
a
by using, for example, the triangle inequalitya C0h
sup11(,\- q)vii£2
vEU
<
Coh {
VhEUh up11(,\-q)vhil£2+
V_LEU..L supli(A-q)vl_ll£2 }
<
Coh
sup11(,\-q)vhll£2 + C6h2aoliA-qlloo,
VhEUh
where
II
·lloo
represents the L00-norm on .0. Then the following theorem holds.Theorem
4.The conditions (3.1 0) are equivalent to the following inequality:
zE( G(.X) )-1 r
Proof.
First, we suppose that
(3.10)
hold. Then, the verification conditions(3.10)
are written asThus we have
ao
>Coh
sup11(-X- q)�t
·Boll£2
+C6h2aoii-X- qlloo
BoEBo
>
Coh
sup11(-X- q)if!t
·aozll£2
+C6h2aoii-X- qlloo
zE(G(.X))-1r
- no ( coh
zE(G(-A))-1r sup11(-X- q)if!t
·ziiL2
+C6h2II-X- qlloo ) ,
and hence,
(3.17)
holds.On the other hand, suppose that
(3.17)
holds. Then definingE-
1- Coh
sup11(-X- q)if!t
·zll£2- C6h2II-X- qlloo,
zE(G(-A))-1r
(3.18)
E >
0
holds by(3.17).
Since we assumed thatq
t A, we define the interval vector b0 asbo
=T(M
+1)Cohii-X-
Eqlloo [1],
where
[1]
=([-1, 1], ... , [-1, 1])t, T
=l�i�M
maxll¢illu
and writeThen we have
(3.19)
and by straightforward calculation, we find that the following inequality holds:
Coh
supII(A- q)�t
·Boll£2
+C6h2aoiiA- qlloo
<ao.
BoEBo
This proves the theorem.
I
Remark 3.1
We can choose
ao
and Bo arbitrarily if they satisfy the relation(3.19).
This arbitrarity comes from the linearity ofF>.., which enables us to calculate B independently of B0(
See(3.11)).
By Theorem
4,
if eachA
E Ai satisfies(3.17),
it follows that there is no eigenvalue of(3.3)
in Ai. In our previous method[14),
it is necessary to check the condition(3.10)
in the sense of intervals. Actually, in that case we often failed to verify the uniqueness of the trivial solution on an interval in which no eigenvalues were contained. In the case of present method, the condition(3.17)
can be easily checked for allA
E Ai. Thus, computational efficiency is greatly increased in our new method. This has been confirmed by actual computations.There are two known methods to verify the existence of solutions of nonlinear elliptic equa
tions, Nakao's method
[9-14)
and Plum's method[17, 18).
In Nakao's method, one decomposes the equation into finite and infinite dimensional parts, and the former is processed by finite element approximations, while the latter is treated using constructive error estimates.
Then, Newton-like iterations for some function sets are executed to find a solution.
In Plum's method, the norm of the inverse of the linearized operator of the original differ
ential equation is evaluated by rigorously estimating the Eigenvalue with Smallest Absolute Value (ESAV) of this linearized operator, and the solution in question is enclosed near an approximate solution by checking a condition of the Newton-Kantorovich type in an infi
nite dimensional space. Therefore, in Plum's method the estimation of the ESAV plays an essentially important role.
In this section, we propose an alternative approach to this problem consisting of a mixture of Nakao's and Plum's verification 1nethods. More precisely, we use a form of Plum's method with local uniqueness for the basic formulation ( c
f. [25)),
and for the estimation of the ESAV of the linearized operator, we use Nakao's method described in Section 3. By applying such a mixed approach, we can obtain a new verification method which includes all the advantages of the two previous methods and none of their disadvantages.4.1 Statement of the problem and the fixed point formulation
We consider the nonlinear elliptic boundary value problems of the form
{
-6.u u
= f (u)
inn'
= 0 on
an,
where we suppose that f satisfies the following assumptions:
Al. f :
HJ(D)
---+L2(D.)
is continuous and maps bounded sets into bounded sets.A2. f is Fn§chet differentiable on
HJ(D).
Let
Uh
Esh
be a finite element approximate solution of( 4.1)
satisfying(
4.1)
We used the library PROFIL
(
cf. [4]),
which enables us to enclose the aboveuh
in very small intervals. We attempt to find the solution of(4.1)
near u satisfying{ -
!:::..u U
=j (
Uh) inn,
= 0 on an.
( 4.2)
For this
u
EH2(n) n HJ(n),
the relationuh
=Phou
holds, as can be confirmed by a simple calculation. From( 4.1)
and( 4.2),
we have{
-!:::..(
U- U)
=j (
U) - j (
Uh) inn,
u -
iL = 0 on an.Defining
Vo
=u-
uh, we then have v0 ESf:,
and we can writeSimilar to the discussion in Section
2,
we obtain the following estimation:Note also that in this estimation we used the L2-estimate of v0:
( 4.3)
Now, in order to verify solutions
u
of( 4.1)
nearu,
writing w = u-u,
we can rewrite( 4.3)
as follows:
f(uh
+Vo
+ w)
-f(uh)
0
inn, on an.
Let
(
-t:::..)-11/J be the solution of(2.2)
for1/J
E L2(n) .
Thenis a bounded operator, and since the imbedding
H2(n)
'---tHJ(D)
is compact,is a compact operator. Thu u ing the compact map F0
: HJ(D)
---tHJ(D)
defined by( 4.4)
we have the fixed point equation for w on
HJ(n),
w
==Fo(w). ( 4.6)
Next, let
F6( -v0)
be the Frechet derivative ofF0
at-v0,
and defineL
=10 - F6( -v0).
Moreover, with
L
=( -l:l)L: HJ(n)
�H-1(0.),
byF�( -v0)u
==( -l:l)-1 f'(uh)u,
we havewhich is a strongly elliptic operator. Here -� is interpreted in a distributional sense. Note that, by restricting the domain of definition of
L
toH2(n)
nHJ(n),
we can regard the operatorL: HJ(n)
�H-1(0.)
asL: H2(n)
nHJ(n)
�L2(n).
Now we discuss the existence of
L-1.
Since
L
==( -ll) (I o - F� (-vo))
holds,
( -�)-1 L
is a Fredholm operator of index 0. If the ESAV ).* ofL
is known to be nonzero, then we have the estimateand therefore,
Lu
== 0 ¢::=::>u
== 0,which implies that
( -l:l)-1 L
is an injection. Thus by the Fredholm alternative theorem,( -l:l)-1 L
has an inverse. Hence the existence of the continuous operatorL -1 : L2(0.)
�H2(D.)
nHJ(D.)
is confirmed.Now, define the operator
T0 : HJ(n)
�HJ(n)
as follows:( 4.7)
This operator is derived by a Newton-like method for the equation
(10 - F0)w
=0.
Then, since the imbeddingH2(f2)
Co.-...tHJ(D)
is compact, using assumptions Aland A2,To
becomes a compact operator onHJ ( n),
and we havew
=To(w)
<===>w
=Fo(w).
4.2 Verification conditions
In this subsection we present a verification condition with uniqueness based upon
[25).
Now, we intend to find a solution to
(4.1)
in a setW0.
Taking a strictly positive real numbera,
a candidate setW0
is defined by( 4.8)
By the method described below we choose strictly positive constants f3 and 1 such that
II To ( 0) II H 6 :::; f3 , ( 4.9)
for all
w1, w2 E Wo. (4.10)
We then define the set
K0
cHJ(n)
byKo={vEHJ(n) lllviiHJ :::;{3+!}, ( 4.11)
which includes the image of
W0
transformed by the linearized operator ofT0.
The verification condition is described in the following theorem.Theorem 5.
If Ko
CWo holds for a candidate set W0 defined by (4.8), namely,
f3 +!:::;a, (4.12)
then there exists a solution to { 4.1) in u + K0. Moreover, this solution is unique within the set u+
Wo.Since the proof of this theorern is similar to that of Theorem
1,
we describe the outline of it.Outline of proof.
We define a caling norm
II
·II
w0 bywhere a is the same one in
( 4.8).
Using this norm we can prove thatTo(Wo)
CWo
and
for some k s.t.
0
< k <1
and for all w1, w2 EW 0
. Then we can apply Banach's fixed point theorem to obtain the desired conclusion.1
4.3 Estimation of constants and algorithm
In this subsection we describe the n1anner in which the constants in
( 4.9)
and( 4.10)
are obtained.Constant {3
Since
holds, we consider constants (1 and 17 satisfying
IITo(O)IIHJ � (111f(uh
+vo)- f(uh)il£2, llf(uh
+vo)- f(uh)li£2 �
17·We then can choose {3 to be
(177.
As for (1 we first calculate the constant
(o
such thatThis constant
(0
is obtained as the inverse of the ESAV of(4.13) ( 4.14)
(4.15)
( -6.)Lu
=>..u.
(4.16)Then we can calculate
(1
from(o
as follows ( cf.[17]). Assume thatL00(D)
3q
=- f'(
uh)
and that there exist constants
g_, q
such that9_ � q( X) � q (X
Ef2).
Then the constant
(1
is derived as follows:(1
=1 V(o(1- g_(o) 1 if g_(o � �'
-- otherwise.
2�
( 4.17)
(4.18)
Since
f(·)
EL2(D)
is assumed to be bounded, TJ can be calculated using a simple estimation.Constant 1
We consider a constant
(2
and a monotonically increasing functionQ
:[0,
oo)
---+[0,
oo)
such that for all
w1, w2
EWo,
( 4.19) ( 4.20) Then since we have
we can choose 1 as
(2Q(cx).
As for
(2,
sinceholds for all
w1 w2
EW0,
we can choose(2
=(1.
vVith regard to the monotonically increasing functionQ
sincef'
:HJ(D)
�.C(HJ(D), L2(D))
(the space of bounded and linear operatorsHJ(D)
�L2(D))
is a bounded and linear operator, we can constructQ
asNow, we describe an algorithm for finding a real number
a
which satisfies the verification condition( 4.12),
Since 1 depends on
a,
we write 1 asI=
!(a).
If f
(
u)
in( 4.1)
is a polynomial in u,!(a)
is a polynomial ina.
Therefore, in order to finda
satisfying
( 4.12),
we may solve the inequality fora.
Here we present the following iteration method.Algorithm
1.
Fix a maximum iteration number.2.
Find a constant {3 satisfying( 4.9).
3.
Seta� {3.
4.
Find a constant!(a)
satisfying(4.10).
5. Check the verification condition
(4.12); {3 +!(a)::; a.
If the condition is satisfied, the verification has succeeded. If not,
Set
a� (1 +8)a (0
<8
<<1), (4.21)
where
8 (0
<8
<<1)
represents an inflation parameter(cf.[19],[23]
etc.). Then increase the iteration number by1
and return to step4.
6. If the maximum iteration number is exceeded, without
( 4.12)
being satisfied, the verification has failed.5 Numerical examples
First, we give two examples whose eigenvalues were enclosed using the method in Section
2.
Specifically, we have verified the eigenvalues with the smallest absolute values
(
ESAV) with the technique described in Section 3. We set the following conditions:n is the rectangular domain
(0, 1)
X(0, 1)
cR2'
and the interval(0,1)
was partitioned into20
pieces(
h = 210)
. The basis in Sh
consists of continuous, piecewise biquadratic polynomials on n.(M
= dimSh =1521)
The inflation parameter 8 in(2.40)
is set to0.0001.
Then the constants appearing previously can be taken ascl
= 2�
andc2
=1 ( cf.[14]).
In the calculations, interval arithmetic is used to avoid the effects of rounding errors in the floating-point computations. The computations were carried out on a Sun Enterprise
450
using the interval library PROFIL coded by Kniippel of the Technical University of Hamburg-Harburg([4]).
PROFIL is implemented as a portable C++ class fast interval library and supports two interval solvers proposed by Rump([19]).
Example 1:
We consider the following self-adjoint eigenvalue problem:
{ -flu- 2uhlu
= AU inn,u
=0
on an,(5.1)
where
uh1
is a finite element solution of the following so-called Emden equation:{ -flu u
=u2
in n,=
0
on an.(5
.2)
We calculated a finite element approximate solution
(uh, ):h)
satisfying(2.6)
using the interval Newton method. The verified results for the ESAV are given in Table1.
These demonstrate that the ESAV exists in the intervaland that it is unique in the interval