実世界に広がる装着型センサを用いた行動センシングとその応用:7. ウェアラブルセンシングの実世界応用
4
0
0
全文
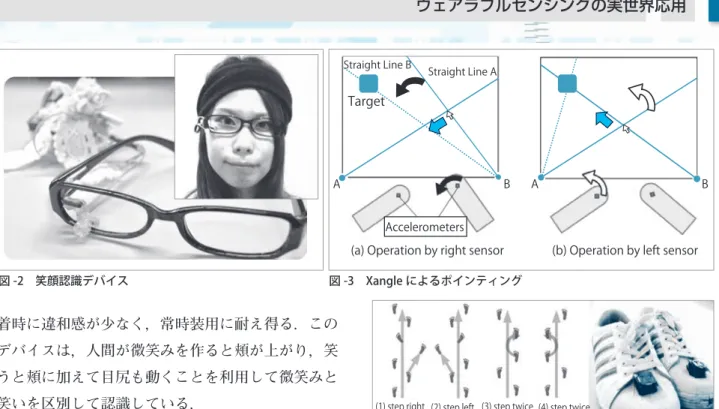
(2) 7. ウェアラブルセンシングの実世界応用. Straight Line B. Straight Line A. Target. A. B. A. B. Accelerometers. (a) Operation by right sensor 図 -2 笑顔認識デバイス. (b) Operation by left sensor. 図 -3 Xangle によるポインティング. 着時に違和感が少なく,常時装用に耐え得る.この デバイスは,人間が微笑みを作ると頬が上がり,笑 うと頬に加えて目尻も動くことを利用して微笑みと 笑いを区別して認識している. ウェアラブルセンシングを利用者の障害部位認識. (1) step right (2) step left (3) step twice (4) step twice right foot left foot. 図 -4FootStep によるステップ入力. に用い,盲目の人には音声,聾唖者には手話ビデオ といったように,障害の部位に応じてコンテンツを. がものを持って行う動作 27 種類に対して,センサ. 切り替え,GPS と地磁気センサを用いて状況依存. の位置や個数が認識に与える影響の評価研究. コンテンツを表示するウェアラブル公園案内システ. 行っている.. 4). 8). を. ムの実証実験も行われている .このシステムでは,. 以降,このようなウェアラブルセンシングの実世. ユーザがモニュメントに近づいて,その方向を向. 界利用における問題点のうち,特に即時性の解決と. いたときに自動的にその場所に応じた説明が HMD. 運動中のジェスチャ認識について解説する.. (Head Mounted Display)を通して再生され,クイ ズなどのアミューズメントコンテンツや現在地の提. 認識の即時性の解決. 示を行う.このような場合,聾唖者には周囲の音情 報を認識・可視化して HMD 上に提示するといっ. 従来研究ではたとえばジェスチャ入力において,. た音響可視化システムも有効である.. 実際の動作から機能発火までの遅延についてはほと. ウェアラブルセンシングは情報入力にも有効であ. んど考慮されていなかったが,実サービスを提供す. る.図 -3 に示すように画面上の 2 本の直線を体に. るにあたってはその遅延が致命的なユーザビリティ. 装着した加速度センサにより角度制御を行い,交. 低下を招く.そこで筆者らは,ダンス動作の認識に. 5). や,図 -4 に示. より音を出力するシステムを題材として遅延の問題. すように靴に装着したセンサを用いて足のステッ. を解消した認識機構を提案した.ダンスステップの. プを認識することで音楽プレーヤ等の制御を行う. 認識には DTW(Dynamic Time Warping)を用い,. 点をポインティングする Xangle. 6). FootStep などのインタフェースが提案されている.. 両足の動きを 3 軸加速度センサによって取得して動作. このようなジェスチャを用いた機器操作は,ユーザ. 認識を行った.予備運用の結果,単純な認識では動. の自然な動作をコンピュータの入力に使えるという. きに対して出力音の開始が遅れるため,音と動きと. 点で有力であるが,そのジェスチャが利用したいと. が同期する心地良さをダンサーに与えられなかった.. きに行えるかどうかが重要になる.そこで筆者らは,. そこで,この研究では「認識の締切時間」 「2 段階. ジェスチャの社会性を評価し,人前で行うのが不自. 認識」「出力音の動的変更」の概念をジェスチャ認. 然でないジェスチャセットを求める研究. 7). や,人. 9). 識に加えることで,この問題を解決した .図 -5. 情報処理 Vol.54 No.6 June 2013. 593.
(3) 特集. 実世界に広がる装着型センサを用いた行動センシングとその応用. BGMの拍 Right Acceleration sensor date. 加速度(mG) (秒). 認識時間 (100ms~400ms). 加速度データ. 基準強度. t(ms) 音出力開始 音変更. ②. この区間はサンプル2で判別. ここまではサンプル1で判別. 角速度(dps). ①. 通過時間が異なる 角速度データ. 振り下ろし振り上げの認識を行う 元のサンプル. サンプル1. t(ms). サンプル2. 図 -5 2 段階認識機構 Hit a real drum. 仮想打面振り下ろし. Hit a virtual drum. 仮想打面振り上げ. ハイアット. 図 -7 仮想打面と実打面の叩打波形の違い. いたときには電子音を鳴らさない(本物のドラムが 鳴る)ため,既存のドラムセットに自由に電子音を Not output sounds. 組み合わせて演奏できる.一般に叩打動作を用いて. Output sounds. 認識する場合,打撃時の振動等を認識するのが容易 である.しかし,本システムも叩打のタイミングで 遅延なしに音を出す必要があるため,叩打の前に認 図 -6 AirStick Drum の概要. ムでは,空中を叩く際には無意識にユーザが振り下. を用いて具体的に述べると,まず出力音を BGM の. ろす動作にブレーキをかける一方,本物のドラムを. 拍のタイミングで出力できるように,認識するステ. 叩く際にはそのブレーキが起こらないことを利用し,. ップを BGM に合わせて実際に踊らせることでステ. 100%の識別率で叩打の数 10ms 前に認識を終える. ップのモーションのうち認識に使える部分を抽出す. ことに成功した.図 -7 に仮想打面を叩打する場合. る機構を開発した.この機構により,ステップを表. と実打面(ハイハット)を叩打する場合の波形を示. すモーション(図中の「元のサンプル」)に対して,. す.図から分かるように,仮想打面と実打面を叩打. 実際認識に使えるのは前半の一部(図中の「サンプ. するときでは,振り下ろし動作の波形の尖度が異な. )であることが分かる.一方,前半部分だけ ル 1」. ることが分かる.. で認識を行うと,似たステップの場合など誤認識が. このように,実世界で認識システムを利用する際. 多くなる.そこで,さらなる工夫として,前半部分. には行動終了の前に認識を終えることが重要になる. のモーションによる認識でまず音を出力しつつ,継. 場合がある.筆者らは,上記の例等を踏まえて,認. ) ,もし前 続して認識を行い(図中の「サンプル 2」. 識高速化の一般化について現在取り組んでいる.こ. 半部での認識が間違っていた場合には出力音を正し. の手法では,ジェスチャ認識において一般的に用い. いものに変更する.この技術により,出力音の遅れ. られている波形比較アルゴリズム DTW を拡張し,. なしに,99%の認識精度を得ることに成功した.. 入力波形と教師データとの距離を逐次的に計算しつ. 10). 594. 識処理を終えておく必要がある.そのため本システ. 同様に,AirStick Drum (図 -6)は,叩打動作. つ,最近傍の教師データと次点の教師データとの距. を加速度センサおよびジャイロセンサを用いて認識. 離の差が相対的に大きくなった時点で認識結果を出. するドラムスティックである.空間をスティックで. 力する.この方式を用いることで高い認識率を保っ. 叩いたときには電子音を鳴らし,本物のドラムを叩. たまま認識時間を平均 65%削減できた.. 情報処理 Vol.54 No.6 June 2013.
(4) ウェアラブルセンシングの実世界応用. まとめ. 05. 0. -05. 0. 10. 20. 30. 40. 50. 60. 70. 0. 10. 20. 30. 40. 50. 60. 70. 7. 05. 0. Acceleration [mG]. -05. 本稿では,ウェアラブルセンシ. 6,000 4,000. Wrist x Wrist y Wrist z Hip x Hip y Hip z. 2,000 0 -2,000 -4,000. 0. 200. 400. 600. 800. 1,000. 1,200. 1,400 1,600. Time [1/20 second]. 図 -8 自己相関による動作識別. Ankle x Ankle y Ankle z Constant Not constant 1,800 2,000. ングを実世界で利用する例を多数 挙げ,特に実利用時に問題となる 即時性や運動中のジェスチャ認識 についてその解決方法を紹介した. ウェアラブルセンシングの課題は 多いがその利用範囲は広く,その. 運動中のジェスチャ検出. 重要性はますます高まっていくと考えられる.. 動作認識を日常的に用いる場合,歩きながらジェ. 参考文献 1) 寺田 努:ウェアラブルセンサを用いた行動認識技術の現状 と課題,コンピュータソフトウェア,Vol.28, No.2, pp.43-54. スチャ入力など,多様な状況を想定する必要がある が,従来研究では学習した状況から少しでも異なる 行動である場合に精度が大幅に悪化していた. 筆者らはこの問題に対処するために,自己相関を 用いた認識高度化技術に関する研究に取り組んでい る. 11). .従来の動作認識技術では, 「ジェスチャと一. 般動作が同時に認識できない」 「認識前に静止しな いとジェスチャを正しく認識できない」といった問 題があった.従来研究における評価実験は,ほかの 動作を行わず,ジェスチャの前後に静止するといっ た条件のもとで行われており,現実世界での多様な 状況に対応できない.特に,歩きながら携帯端末を 使うような状況では,歩行とジェスチャの区別がつ かず,また,姿勢や運動状態の判定とジェスチャの 認識では適したアルゴリズムが異なるため,単一の アルゴリズムではさまざまな動作を認識できない. そこでこの研究では,自己相関関数を用いることで 行動を分類し,あらゆる動作を適切に認識する手法 を提案している.図 -8 を用いて具体的に述べると, 繰り返し動作を含む運動波形の自己相関にはピーク が現れる一方,ジェスチャにはピークが現れない (図 -8 上部)ことを利用し,該当区間にジェスチャ. (2011). 2) Kobayashi, Y., Terada, T. and Tsukamoto, M. : A Context Aware System Based on Scent, International Symposium on Wearable Computers, pp.47-50 (2011). 3) Fukumoto, K., Terada, T. and Tsukamoto, M. : A Smlie/ Laughter Recognition Mechanism for Smile-based Life Logging, Augmented Human Conference 2013 (Mar. 2013). 4) Miyamae, M., Kishino, Y., Terada, T., Tsukamoto, M. and Nishio, S. : An Event-driven Navigation Platform for Wearable Computing Environments, International Conference on Wearable Computers, pp.100-107 (2005). 5) Horie, T., Katayama, T., Terada, T. and Tsukamoto, M. : A Pointing Method Using Accelerometers for Graphical User Interfaces, Augmented Human Conference2012, No.12, pp.18 (2012). 6) 山本哲也,義久智樹,寺田 努,塚本昌彦:ジョギング時に おける情報機器利用のための足ステップ入力方式,情報処理 学会論文誌,Vol.50, No.12, pp.2881-2888 (2009).. 7) Yamamoto, T., Terada, T. and Tsukamoto, M. : Designing Gestures for Hands and Feet in Daily Life, International Symposium on Emerging Research Projects, Applications and Services, pp.285-288 (2011). 8) Murao, K., Terada, T., Yano, A. and Matsukura, R. : Evaluation Study on Sensor Placement and Gesture Selection for Mobile Devices, International Conference on Mobile and Ubiquitous Multimedia (2012). 9) Fujimoto, M., Fujita, N., Takegawa, Y., Terada, T. and Tsukamoto, M. : A Motion Recognition Method for a Wearable Dancing Musical Instrument, International Symposium on Wearable Computers, pp.9-16 (2009). 10)Kanke, H., Takegawa, Y., Terada, T. and Tsukamoto, M. : Airstic Drum : a Drumstick for Integration of Real and Virtual Drums, International Conference on Advances in Computer Entertainment Technology 2012, pp.57-69 (2012). 11)Murao, K. and Terada, T. : A Motion Recognition Method by Constancy-Decision, International Symposium on Wearable Computers, pp.69-72 (2010). (2013 年 4 月 2 日受付). が行われたと判断した場合のみ,ジェスチャ認識ア ルゴリズムを使用する.この手法により,運動中の. 7 種類のジェスチャ認識において従来手法は再現率 0.75,適合率 0.59 であるのに対し,提案手法では 再現率 0.93,適合率 0.93 を得ることに成功した.. 寺田 努(正会員)■ [email protected] 1999 年大阪大学大学院工学研究科博士前期課程修了.2000 年より 大阪大学サイバーメディアセンター助手.2005 年より同講師.2007 年神戸大学大学院工学研究科准教授.NPO 法人ウェアラブルコンピ ュータ研究開発機構理事を兼務.博士(工学).. 情報処理 Vol.54 No.6 June 2013. 595.
(5)
図
関連したドキュメント
[r]
この説明から,数学的活動の二つの特徴が留意される.一つは,数学の世界と現実の
Ando, “High-speed atomic force microscopy shows dynamic molecular processes in photoactivated bacteriorhodopsin.,” Nat. Ando, “Structural Changes in Bacteriorhodopsin in Response
Ando, “High-speed atomic force microscopy shows dynamic molecular processes in photoactivated bacteriorhodopsin.,” Nat. Ando, “Structural Changes in Bacteriorhodopsin in Response
70年代の初頭,日系三世を中心にリドレス運動が始まる。リドレス運動とは,第二次世界大戦
(実被害,構造物最大応答)との検討に用いられている。一般に地震動の破壊力を示す指標として,入
[r]
【オランダ税関】 EU による ACXIS プロジェクト( AI を活用して、 X 線検査において自動で貨物内を検知するためのプロジェク
