A
Simple
SOCP formulation of
\mathrm{M}
而而zation
of Network
Congestion
Ratio
Bimal Chandra
Das,
Eiji
Oki and Masakazu Muramatsu
Department
of CommunicationEngineering
and InformaticsThe
University
of
Electro‐Communications,
Tokyo
\mathrm{E}‐mail:
[email protected], [email protected], [email protected].
1
Introduction
The networklinkutilizationrate is the ratio oftraffic flow
through
alink and itscapacity.
Thenetworkcongestion
ratioisthemaximumvalue of all links utiliza‐tionrates. Whensomehnksornodesinnetwork broadcasttoomuch
information,
it causes network
congestion
and decreases the networkperformance by taking
moretimetosendinformation fromsourceto
destination,
packet
lossorreducing
the
throughput
([1]).
Howtominimize thecongestion
ratio isanimportant
affairsof information and communication
technology
(ICT)
sector.Thereare several researches onthe minimization of the network
congestion
ratio.
Wang
andWang
[2]
proposed
aspecific routing problem
for intemettrafficengineering
as alinearprogramming
(LP)
problem
whoseobjective
istominimizethe
congestion
ratio. Intheirworkthey
assuming
that the traffic demandd_{pq}
forevery
pair (p, q)
of source node pand destination node q isexactly
known. Infact,
duetotheexacttrafficmatrix,
T=\{d_{pq}\}
this researchprovides
aacceptable
routing
performance
than theMulti‐Protocol LabelSwitching
(MPLS)
standard.The traffic model which is
exploits
theexacttraffic matrixis known as thepipe
In this
research,
we propose amodel based on robustoptimization
to mini‐mizethe network
congestion
ratio. We considersomefluctuations intheestimatedtrafficdemandsof the
pipe
modeldepending
on aparameterapplying
robustopti‐
mization
technique
tobuildupsecond‐orderconeconstraintsandfinally
formulatethe
problem
asthe SOCP model.2
UackUone Network and Network Model
The network is
represented
as a directedgraph
G(V, A)
, where V is the set ofvertices
(nodes)
and A is the set of links. LetQ\subseteq V
be the setofedge
nodesthrough
which traffic is admitted intoandgoing
outsidethenetwork. A link fromi\in Vtonode
j\in V\backslash \{i\}
is denotedas(i,j)\in A,
i\neq j
. Letanedge
nodepair
of
p\in Q
andq\in Q
, wherep\neq q,be denotedby (p, q)\in W
,where W is the setof
edge‐node pairs (p, q)
.x_{ij}^{pq}
is theportion
oftraffic from nodep\in Q
tonodeq\in Q
routedthrough
link(i,j)\in A.
c_{ij} is thecapacity
of link(i,j)\in A
. Thenetwork
congestion
ratio,
whichreferstothemaximum valueof alllinkutilizationratesin the
network,
is denotedby
r. Theadmissible trafficin the networkcanbemaximized
by minimizing
the networkcongestion
ratio,
r. Theadmissibletrafficis
accepted
uptothecurrenttraffic volumemultiplied
by 1/r.
The backbone network or network that interconnects various
pieces
of net‐work
provides paths
for theexchange
of informationbetween different LANsorsubnetworks. It can tie
together
diverse networks inthe same area, in differentareas,or overwideareas. A
large corporation
that hasmanylocationsmayhaveabackbone networkthat ties all ofthelocations
together.
Thenetworkcongestion
ratioisoften takeninto consideration while
designing
thenetwork. Tominimizethe network
congestion
ratiowithrouting
controlis theobjective
of thispaper.3
Pipe
Model
Inthe
pipe
model,
the traffic demand informationT=\{d_{pq} : (p, q)\in W\}
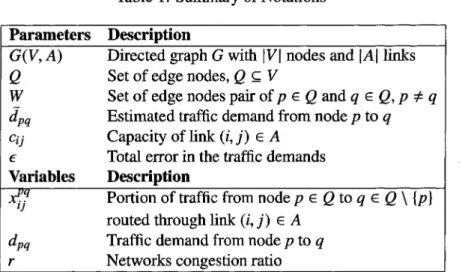
areTable 1:
Summary
of NotationsParameters
Description
G(V, A)
Directedgraph
Gwith|V|
nodesand|A|
linksQ
Setofedge
nodes,Q\subseteq V
W Setof
edge
nodespair
ofp\in Q
andq\in Q,
p\neq q\overline{d}_{pq}
Estimated trafficdemand from node ptoqc_{ij}
Capacity
of link(i,j)\in A
$\epsilon$ Totalerrorin thetraffic demands
Variables
Description
Portion of traffic fromnode
p\in Q
toq\in Q\backslash \{p\}
ij
routed
through
link(i,j)\in A
d_{pq}
Traffic demand from node ptoqr Networks
congestion
ratioformulation for the
pipe
modelto minimize the networkcongestion
ratio, is asfollows:
\displaystyle \min r
(1a)
s.t.
\displaystyle \sum_{j:(i,j)\in A}x_{ij}^{pq}-\sum_{j:(j,i)\in A}x_{ji}^{pq}=1,
\forall(p, q)\in W, i=p
(1b)
\displaystyle \sum_{j:(i,j)\in A}x_{ij}^{pq}-\sum_{j:(j,i)\in A}x_{ji}^{pq}=0,
\forall(p, q)\in W,\forall i\in V\backslash \{p, q\}
(1c)
\displaystyle \sum_{(p,q)\in W}d_{pq}x_{ij}^{pq}\leq c_{ij}\cdot r,\forall(i,j\rangle\in A
(1d)
0\leq x_{ij}^{pq}\leq 1,\forall(p, q)\in W,\forall(i,j)\in A
(1e)
0\leq r\leq 1.
(1f)
Here the constraints
(1b)
and(1c)
are flow conservation constraints. Constraint(1b)
represents thatthe totalportion
oftraffic flowoutgoing
from nodei(=p)
isnode imustbesame as thetotal
portion
ofoutgoing
from nodei if the node i isneithera source ordestinationnode for the traffic flow. Constraint
(1d)
indicatesthat thesumofthe
portion
of traffic demands broadcastedthrough
thelink(i,j)
isequal
toorless than thecapacity
of that link times the networkcongestion
ratio.The
objective
functionrepresented by Eq.
(1a)
minimizes thenetworkcongestion
ratio. The
pipe
modelgenerally
achievesahigh routing performance;
however,
itrequires
exactdata of trafficdemands T,which is sometimes difficulttoobtain inreality.
4
Robust
optimization
When somecoefficientsofan
optimization problem
hasuncertainty
andwewantto
optimize
theproblem
in the worstcasewithrespecttotheuncertainty
insomesense,the
resulting optimization problem
is calledarobustoptimization problem
([7],
[13], [8]).
Inthispaper,weproposeadifferenttypeof
assumptions
on errors. Ourmodelcancapturedeviations of demandtoalloverthe network.
Specifically,
weproposetoboundthetotalamountofsquared
errorsin\overline{d}_{pq}
forall
(p, q)\in W by
apositive
constant, $\epsilon$,and thetrue demandiscontainedin:$\Theta$_{ $\epsilon$}=\{\mathrm{d}:\sqrt{\sum_{(p,q)\in W}(d_{pq}-\overline{d}_{pq})^{2}}\leq $\epsilon$\}
,(2)
Inour
model,
$\epsilon$isasingle
network‐wideparameter. It is easytoseethefollowing
inclusion
relationships
between thetwo sets, so we omittheproof.
InSection5,
weproposearobust
optimization
model basedontheerTor(2)
tothepipe
model.Notethatinour
model,
weneed the estimatedvaluedenotedby
\overline{d}_{pq}
for every5
Robust
optimization
Model
for
Pipe
Model
We
apply
therobustoptimization technique
tothepipe
model. Since theconstraint(1d)
should be satisfiedfor every\mathrm{d}\in$\Theta$_{ $\epsilon$}
, we have thefollowing
inequality
foreach
(i,j)\in A
:\displaystyle \mathrm{m}\mathrm{a}\mathrm{x}\mathrm{d}\in$\Theta$_{ $\epsilon$}(\sum_{(p,q)\in W}d_{pq}x_{ij}^{pq})\leq c_{ij}\cdot r
.(3)
Nowweevaluate the left hand side
of(3)
toobtainasecond‐orderconeconstraint.The
following
lemmaplays
acrucial roleinevaluating
the lefthand side of(3).
Lemma 1 Let
$\Omega$_{ $\theta$}=\{x\in \mathbb{R}^{n} : ||x||\leq $\theta$\}
, where||\cdot||
is the Euclideannorm. Forgiven
a\in \mathbb{R}^{n} and $\theta$>0, wehave\displaystyle \max_{x\in$\Omega$_{ $\theta$}}a^{T}x= $\theta$||a||.
Proof The
Lagrangian
function oftheoptimization
problem,
\displaystyle \max_{\mathrm{x}\in$\Omega$_{ $\theta$}}\mathrm{a}^{T}\mathrm{x}
, s.t||\mathrm{x}||\leq $\theta$, \forall \mathrm{x}\in$\Omega$_{ $\theta$}
isF(\mathrm{x}, $\lambda$)\equiv \mathrm{a}^{T}\mathrm{x}+ $\lambda$( $\theta$-||\mathrm{x}|
Karush‐Kuhn‐Tucker
(KKT)
conditionsattheoptimal point
are(i) \nabla_{\mathrm{x}}F(\& $\lambda$)\equiv \mathrm{a}- $\lambda$\nabla_{\mathrm{x}}||\mathrm{x}||=0
,(ii) $\lambda$( $\theta$-||\mathrm{x}||)=0,
(iii) $\theta$-||\mathrm{x}||\geq 0
,(iv)
$\lambda$\geq 0Fromcondition(i),
wecanwrite\displaystyle \mathrm{a}- $\lambda$\nabla_{\mathrm{x}}||\mathrm{x}||=0\Leftrightarrow \mathrm{a}- $\lambda$\frac{\mathrm{x}}{||\mathrm{x}||}=0\Leftrightarrow \mathrm{a}||\mathrm{x}||= $\lambda$ \mathrm{x}\Leftrightarrow \mathrm{a} $\theta$= $\lambda$ \mathrm{x}
\Leftrightarrow||\mathrm{a}|| $\theta$= $\lambda$||\mathrm{x}||\Leftrightarrow||\mathrm{a}|| $\theta$= $\lambda \theta$
$\lambda$=||\mathrm{a}||
Again,
\mathrm{a} $\theta$= $\lambda$ \mathrm{x}\displaystyle \Leftrightarrow \mathrm{x}= $\theta$.\frac{\mathrm{a}}{||\mathrm{a}||}\Leftrightarrow \mathrm{a}^{T}\mathrm{x}= $\theta$.\frac{\mathrm{a}^{T}\mathrm{a}}{||\mathrm{a}||}
\displaystyle \Leftrightarrow \mathrm{a}^{T}\mathrm{x}= $\theta$.\frac{||\mathrm{a}||^{2}}{||\mathrm{a}||}\Leftrightarrow \mathrm{a}^{T}\mathrm{x}= $\theta$||\mathrm{a}||.
\mathrm{x}isthe
optimal
solution of the aboveoptimization problem,
which indicates thatTo
apply
Lemma 1 toevaluatethe left hand side of(3),
weintroduceavari‐able:
v_{pq}=d_{pq}-\overline{d}_{pq}
foreach
(p, q)\in W
. Thenweeasily
seethat\mathrm{d}\in$\Theta$_{ $\epsilon$}\Leftrightarrow \mathrm{v}\in$\Omega$_{ $\epsilon$}.
Therefore,
using
Lemma1, wehave for every(i,j)\in A
\displaystyle \mathrm{m}\mathrm{a}\mathrm{x}\mathrm{d}\in$\Theta$_{ $\epsilon$}(\sum_{(p,q)\in W}d_{pq}x_{ij}^{pq})
=\displaystyle \max_{\mathrm{v}\in$\Omega$_{ $\epsilon$}}(\sum_{(p,q\rangle\in W}v_{pq}x_{ij}^{pq})+\sum_{(p,q)\in W}\overline{d}_{pq}x_{ij}^{pq}
= $\epsilon$\displaystyle \sqrt{\sum_{(p,q)\in W}(x_{ij}^{pq})^{2}}+\sum_{(p,q)\in W}\overline{d}_{pq}x_{ij}^{pq}
.(4)
Substituting
theleft hand side of(3)
by
(4),
weobtain theequivalent inequal‐
ity
forevery(i,j)\in A
:\displaystyle \sqrt{\sum_{(p,q)\in W}(x_{ij}^{pq})^{2}}\leq\frac{1}{ $\epsilon$}(c_{i_{\dot{J}}}\cdot r-\sum_{(p,q)\in W}\overline{d}_{pq}x_{ij}^{pq})
.Wenowintroduceasecond‐ordercone
programming problem
(SOCP).
The closedconvex cone
SOC
(1+r)=\{\mathrm{x}\in \mathbb{R}^{1+r}
:x_{0}\geq\sqrt{\sum_{j--1}^{r}x_{j}^{2}}\}
iscalled the1+rdimensionalsecond‐ordercone.Whenasubvectorof variables is
restricted inasuitabledimensional second‐ordercone,suchaconstraintiscalled
a second‐order constraint. Ifan
optimization problem
hasonly
alinearobjective
function,
linearconstraints,
and second‐orderconeconstraint,
then suchanopti‐
An SOCPcanbe solvedvery
efficiently by
theprimal‐dual
interior‐point
methods([11], [12]).
Infact,
the modemoptimization
softwares suchasSCII), CPLEX,
orGurobi
([9],
[10],[6])
canhandleSOCP.The constraintin
(8)
containing
squarerootcanbe casted into thefollowing
form
using
the second‐ordercone:w_{pq}^{ij}=x_{ij}^{pq}
(5)
w_{0}^{ij}=(c_{ij}\displaystyle \cdot r-\sum_{(p,q)\in W}\overline{d}_{pq}x_{ij}^{pq})/ $\epsilon$
(6)
(_{\mathrm{w}^{ $\iota$ j}}w_{0}^{ij})\in \mathrm{S}\mathrm{O}\mathrm{C}(1+|W|)
,(7)
where
\mathrm{w}^{ij}=(w_{pq}^{ij})_{(p,q)\in W}
. The first two constraints are linear, andthe last oneis a second‐order cone constraint. As a
result,
we obtain an SOCP as a robustoptimization
modelofthepipe
modelasfollows:\displaystyle \min r
s.t.
Eqs.
(1b), (1c)
Eqs.
(5), (6), (7),
(i,j)\in A
(8)
Eqs.
(1e),
(1\overline{\mathrm{f}})
.By
introducing
the SOCP modelthe operators candeal withoutknowing
theexacttraffic demand
by
allowing
them to total error in the estimatedtraffic de‐mand. Weformulate the
problems
as second‐orderconeprogramming
problems
whose
objective
is tominimize the networkcongestion
ratio in the caseof traf‐fic fluctuation. InSOCP
model,
we canmakemanyfluctuationsin the estimatedtrafficdemandwhich is a
major
advantage
of thismodel. Effectiveness ofSOCPmodel
compared
tothe others modeltominimizethecongestion
isfuturework.References
[1] J. Xu,J. Z. Yang, C. Guo,
Yann‐Hang
Lee andD. Lu,Routing algorithm
ofmin‐21,pp. 1713‐1732,2015.
[2] Y.Wangand Z.Wang,
Explicit
routing algorithmsfor intemet trafficengineenng,IEEE International Conference on Computer Communications and Networks (IC‐
CCN),1999.
[3] A. Juttner, I. Szabo, A. Szentesi, On bandwidth efficiency of the hose resource
managementmodelin virtual
private
networks,IEEEInfocom
2003, pp. 386‐395,Mar.
/\mathrm{A}\mathrm{p}\mathrm{r}
.2003.[4] N. G. Duffield, P.
Goyal,
A. Greenberg, P. Mishra, K. K. Ramakrishnan, and J. E.vanderMerwe,resourcemanagementwith hose:point‐to‐cloudservices for virtual
private
networks,IEEElACM Trans.onNetworking,
vol.10,no.5,pp. 679‐692,Oct.2002.
[5] A. Kumar,R.
Rastogi,
A.SilUerschatz, andB. Yener,Algorithms
forprovisioning
virtual
private
networks inthe hose model, the200lConference
onApplications,Technologies,
Architectures, andprotocolsfor
Computer Communications, pp 135‐146,2001.
[6]
\mathrm{h}\mathrm{t}\mathrm{t}\mathrm{p}://\mathrm{w}\mathrm{w}\mathrm{w}.gurobi.com,
verison: 6.5.2(October Sky 2015)[7] Stephen BoydandLievenVandenberghe,
Approximation
andfittinginConvexOp‐timization,
Cambridge,
UnitedKingdom, CamUridge University
Press,2005,pp. 318‐324.
[8] J. P. Pedroso, Abdur Rais, Mikio Kubo andMasakazu Muramatsu,Second‐order
cone
optimization
in Mathematical 0ptimization:Solving
Problems using Gurobiand
Python,
Sept.,2012,pp. 108‐115.[9]
http:
//scip.zib.de
[10]
https://www‐01.ibm.\mathrm{c}\mathrm{o}\mathrm{n}d\mathrm{s}\mathrm{o}\mathrm{f}\mathrm{t}\mathrm{w}\mathrm{a} $\iota$ \mathrm{e}/\mathrm{c}\mathrm{o}\mathrm{m}\mathrm{m}\mathrm{e}\mathrm{r}\mathrm{c}\mathrm{e}/\mathrm{o}\mathrm{p}\mathrm{t}\mathrm{i}\mathrm{m}\mathrm{i}\mathrm{z}\mathrm{a}\mathrm{t}\mathrm{i}\mathrm{o}\mathrm{n}/\mathrm{c}\mathrm{p}\mathrm{l}\mathrm{e}\mathrm{x}‐optimizer/
[11] Yu. Nesterov, A.
Nemirovsky, Intenor‐point polynomial
methods inconvex pro‐gramming
studiesinApplied
Mathematics,, vo113, SIAM,Philadelphia,
1994.[12]
Stephen Boyd
andLievenVandenberghe, Intenor‐point
methods in Convex Op‐timization,
Cambridge,
UnitedKingdom, Cambridge University
Press, 2005,ch.ll,sec. 11.7,pp.609‐614.
[13] HansFrenk, KeesRoos,Tamas