IGRT-QA/QC Working group report
推薦の言葉
大阪医科大学附属病院 放射線科 猪俣泰典 科学技術の恩恵は放射線治療の分野においても例外ではない.放射線治療技術の進歩により安全か つ確実に癌の放射線治療を行うことが可能となり,定位放射線治療や強度変調放射線治療に代表され る高度な技術に支えられた治療が多くの施設で行われつつある.これらの治療は病巣に対する線量集 中性が最大の特徴で線量勾配も急峻である.いかに厳密な治療計画を立案しても実際の治療が意図し た通りに行われなければ,せっかくの治療も文字通り「絵に描いた餅」となりかねない.治療対象は われわれが想像する以上に動いていることが常である.そのため高い精度で正確な場所に放射線を照 射する技術が非常に重要となる.これを実現するためには Image-guided radiotherapy (IGRT)装置が必 須であり,本装置を導入する施設が急増している.
IGRT 装置を用いた放射線治療をより確実に行うためには適切な QA/QC の指針が必要である.そ のために日本放射線技術学会ほか2学会の主導により IGRT ガイドラインが決められたが,QA/QC を 行うための具体的な方法については言及されていなかった.そのことが QA/QC を実践する上で支障 となっていた.そこで IGRT を行うための具体的な QA/QC の手法を提案する目的で「放射線治療か たろう会」がワーキンググループを立ち上げ,その成果を「IGRT-QA/QC Working group report」とし て上梓された.これは高精度放射線治療の時代を迎えた現在にあって誠に時宜を得たものである.本 書は装置ごとにシステムの構成と特徴に始まり,各装置に必要な QA 項目を多くの写真入りで詳細に 解説している.巻末にはチェックすべき QA 項目,QA を行う頻度,許容値がまとめられ,ワークシ ートが付されていて実践的でただちに役立つ内容となっている.放射線治療が高精度化すればするほ ど QA/QC の重要性が高くなることはいくら強調しても強調しすぎることはない.各施設が本書に基 づいて QA/QC を行うようになれば,QA/QC の「実践的な標準化」が可能となるという意味でも本書 の意義は大きい.放射線治療に携わる医療従事者必携の書であり,座右において活用されることを強 くお薦めする.
刊行にあたって
未曾有の被害を出した東日本大震災から1年,復興への道はまだまだ険しく,震災の被害に遭われ た方々にはあらためてお見舞いを申し上げるとともに,1 日でも早く元の生活に戻られることをお祈 りいたします. 大きな被害を出した福島第一原発事故はいまだ問題が山積し,近隣住民のみならず多くの人々が不 安の中で日々を過ごしている.放射線に対してこれまで以上に厳しい目を向けられている中,我々放 射線を取り扱う仕事に携わる者は,信頼を得るために,いかに安全に放射線を用い,最適な医療を提 供していくのかを考え,実践して行かなければならない. 放射線治療の分野においても,誤照射事故を防ぐべく様々な取り組みがなされてきている.これま で放射線治療かたろう会でも多くの QA/QC にまつわる情報を発信してきた.一昨年には「放射線治 療計画におけるリスクマネジメント」を,放射線治療かたろう会 working group(WG)report 第一弾 として刊行した.今回は,画像誘導放射線治療(IGRT)の QA/QC について WG を発足させた.
IGRT は現在の放射線治療,特に強度変調放射線治療(Intensity modulated radiation therapy: IMRT)や, 体幹部定位放射線治療(Stereotactic body radiotherapy: SBRT)といった高精度放射線治療を行う上で必 要不可欠な技術となっているが,同時にその安全な利用のための QA/QC の指針が待たれていた.本 文に詳しく述べるが,今回 WG では,日本医学物理学会,日本放射線技術学会,日本放射線腫瘍学会 により策定された「画像誘導放射線治療臨床導入のためのガイドライン(略称:IGRT ガイドライン)」 をもとに,AAPM TG-142 を参考に QA/QC の具体的な手法,頻度,許容値の提案を行った.放射線治 療の高精度化に伴い,IGRT は今後ますます広まって行くものと考える.各施設において安全に IGRT システムを使用するための,QA/QC の実務に関する標準化の一助となれば幸いである. 平成 24 年 3 月 放射線治療かたろう会 IGRT QA/QC Working group
おことわり
本 WG report は,IGRT の QA/QC 実務の手助けとして作成されたものであり,必ずしもここで紹介 する方法に束縛される必要はない.各施設の判断において見直しを含め実施していただきたい.放射 線治療は日々変化しており,今後 WG においても改訂を含めた検討を行っていく予定である.
最後に,本 WG report による安全対策,治療効果に対する責任は各施設の治療担当者に帰するもので あり,放射線治療かたろう会,Working group メンバーが責任を負うものではない.
IGRT QA/QC WG メンバー
委員長 秋田 和彦 大阪医科大学病院 Elekta 班 班長 辰己 大作 大阪市立大学病院 小田 雅彦 兵庫医科大学病院 SIEMENS 班 班長 太田 誠一 大阪大学病院 山口 肇 NTT 西日本大阪病院 Varian 班 班長 宮崎 正義 大阪府立成人病センター 川守田 龍 多根総合病院 谷 正司 大阪府立母子保健総合医療センター 南部 秀和 近畿大学医学部奈良病院 Novalis 班 班長 高倉 亨 京都大学病院 木下 尚紀 都島放射線科クリニック 吉峰 正 県立奈良医大病院 オブザーバー 奥村 雅彦 近畿大学病院 隅田 伊織 大阪大学歯学部 松本 光弘 大阪大学大学院医学系研究科 班長以下五十音順 サポートメンバー Elekta 班 兵庫医科大学病院 井上 裕之 田ノ岡 征雄 大阪市立大学病院 中田 良成 SIEMENS 班 NTT 西日本大阪病院 網干 景子 五十野 優 木崎 寿夫 大阪大学大学院医学系研究科 尾方 俊至 Varian 班 大阪府立成人病センター 上田 悦弘 多根総合病院 市岡 可奈子 岡田 亘 中原 隆太 大阪府立母子保健総合医療センター 西尾 牧子 Novalis 班 京都大学病院 鶴田 裕輔目 次
1.はじめに
・・・・・・・・・・・・・・・・・・・・・・・・・・・・1
2.IGRT の役割
・・・・・・・・・・・・・・・・・・・・・・・・・・・・1
3.WG のコンセプト
・・・・・・・・・・・・・・・・・・・・・・・・・・・・2
3-1.目的 3-2.内容についての方針及び解釈 3-2-1.対象装置 3-2-2.IGRT ガイドライン 3-3.IGRT ガイドライン指針の解釈 3-4.頻度,許容値4.装置別 IGRT QA/QC
4-1.Elekta ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・5 4-1-1.Elekta IGRT システムの構成と特徴 4-1-2.レーザー照準器の位置精度(項目 a) 4-1-3.位置照合装置の位置精度(項目 b) 4-1-3-1.MV(EPID)imaging 4-1-3-2.kV imaging 4-1-4.位置照合装置と放射線照射装置の両座標系の整合性(項目 c) 4-1-4-1.MV(EPID)imaging 4-1-4-2.kV imaging 4-1-4-3.kV CBCT 4-1-5.位置照合装置の機械的接触防止インターロック(項目 d) 4-1-6.位置照合装置の画質(項目 e) 4-1-6-1.MV(EPID)imaging 4-1-6-2.kV imaging 4-1-6-3.kV CBCT 4-1-6-4.フラットパネルディテクタ(FPD)のキャリブレーション 4-1-7.位置照合解析ソフトウェア(項目 g) 4-1-7-1.kV CBCT の位置検出精度の確認 4-1-7-2.オートマッチングの検出精度の確認 4-1-8.治療寝台移動の位置精度(項目 h) 4-1-9.位置照合装置と放射線治療管理システムとの通信の信頼性(項目 i) 4-1-10.総合的な位置精度の検証4-2.SIEMENS ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・20 4-2-1. SIEMENS IGRT システムの構成と特徴 4-2-1-1.フラットパネル位置キャリブレーション 4-2-1-2.MV CBCT ジオメトリキャリブレーション 4-2-2. レーザー照準器の位置精度(項目 a) 4-2-2-1.壁,床マークとレーザーの一致の確認 4-2-2-2.メカニカルポインタとレーザーの一致の確認 4-2-2-3.レーザーと照射系中心との一致 4-2-3. 位置照合装置の位置精度(項目 b) 4-2-3-1.EPID 停止位置の定常性の確認
4-2-3-2.Source imager distance(SID)の定常性の確認
4-2-4. 位置照合装置と放射線照射装置の両座標系の整合性(項目 c) 4-2-4-1.MV (EPID) image 4-2-4-2.MV CBCT 4-2-4-3.MV (EPID) imaging,MV CBCT 4-2-5. 位置照合装置の機械的接触防止インターロック(項目 d) 4-2-6. 位置照合装置の画質(項目 e) 4-2-6-1.MV (EPID) image 4-2-6-2.MV CBCT 4-2-6-3.フラットパネルのゲインキャリブレーション 4-2-7. 位置照合解析ソフトウェア (項目 g) 4-2-7-1.MV (EPID) imaging 4-2-7-2.MV CBCT 4-2-8.治療寝台移動の位置精度(項目 h) 4-2-9.位置照合装置と放射線治療管理システムとの通信の信頼性(項目 i)
SIEMENS IGRT QA Table
4-3.Varian ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・39 4-3-1.Varian IGRT システムの構成と特徴 4-3-2.レーザー照準器の位置精度(項目 a) 4-3-2-1.Daily 4-3-2-2.Monthly 4-3-3.位置照合装置の位置精度(項目 b) 4-3-3-1.MV(EPID)imaging 4-3-3-2.kV imaging 4-3-4.位置照合装置と放射線照射装置の両座標系の整合性(項目 c) 4-3-4-1.MV(EPID)imaging 4-3-4-2.kV imaging
4-3-4-3.kV CBCT 4-3-5.位置照合装置の機械的接触防止インターロック(項目 d) 4-3-6.位置照合装置の画質(項目 e) 4-3-6-1.MV(EPID)imaging 4-3-6-2.kV imaging 4-3-6-3.kV CBCT 4-3-7.位置照合解析ソフトウェア(項目 g) 4-3-8.治療寝台移動の位置精度(項目 h) 4-3-9.位置照合装置と放射線治療管理システムとの通信の信頼性(項目 i) 4-3-10.kV imagingの総合的な位置精度の検証
Varian IGRT QA Table
4-4.Novalis (BrainLAB) ・・・・・・・・・・・・・・・・・・・・・・・・・・60 4-4-1.Novalis IGRT システムの構成と特徴 4-4-2.レーザー照準器の位置精度(項目 a) 4-4-3.位置照合装置の位置精度(項目 b) 4-4-3-1.位置照合装置のキャリブレーション 4-4-3-2.位置照合装置の検証 4-4-4.位置照合装置と放射線照射装置の両座標系の整合性(項目 c) 4-4-5.位置照合装置の機械的接触防止インターロック(項目 d) 4-4-6.位置照合装置の画質(項目 e) 4-4-7.位置照合解析ソフトウェア(項目 g) 4-4-7-1.ソフトウェアのスケーリング精度 4-4-7-2.ソフトウェアの位置検出精度 4-4-8.治療寝台移動の位置精度(項目 h) 4-4-9.位置照合装置と放射線治療管理システムとの通信の信頼性(項目 i)
Novalis IGRT QA Table
5.付録
IGRT-QA/QC Worksheet(例) ・
Elekta
・SIEMENS
・Varian
・Novalis (BrainLAB)
1. はじめに
定位放射線治療や強度変調放射線治療のような高精度放射線治療では,ターゲットに対する線量集 中性および計画された急峻な線量勾配の正確さが要求される.画像誘導放射線治療(Image-guided radiotherapy: IGRT)とは位置照合を実施することにより照射位置精度を向上させるための技術であり, 高精度放射線治療では必要不可欠である. 2010 年 4 月に画像誘導放射線治療加算として保険収載されて以来,IGRT 導入施設が増加し,各施設 で IGRT を安全に行うための QA/QC 指針が求められてきた. こうしたなか,日本医学物理学会,日本放射線技術学会,日本放射線腫瘍学会(五十音順),により 「画像誘導放射線治療臨床導入のためのガイドライン」(略称:IGRT ガイドライン)が策定された1). IGRT ガイドラインでは QA/QC についての指針が示されているが具体的な手法については言及され ていない.そこで,放射線治療かたろう会では,上記 IGRT ガイドラインをより具体的にするための ワーキンググループ(WG)を立ち上げた. 本レポート(WG report)では,できるだけ具体的な QA/QC が出来る様,メーカー毎に項目の具体化と 絞り込みを行い,実際の写真も多く取り入れ,各項目の頻度,許容値も示した.また,付録にワーク シートの例を示した. さらに,以下の用語は AAMP TG 142 に準拠するようにした.kilovoltage(kV)の CBCT は,kV Cone-beam CT (kV CBCT),kV の 2D 撮影は kV imaging system , Megavoltage(MV)の撮影は MV (EPID) imaging,MV の CBCT は MV CBCT とした.
2. IGRT の役割
IGRT の役割として, 1)照射の直前や照射中に画像取得をすることにより,その画像情報から得られるずれ量を求めて 寝台位置修正が行える. 2)イメージガイドデバイスにもよるがターゲットおよびターゲット周辺臓器の状態(位置,形状 の変化,ガスの状態など)や,体型の把握が可能. 3)位置照合結果の評価から導出される PTV のマージン縮小の可能性. 4)治療中の動体観察. などが挙げられる. 1 回の投与線量が多い SRT や,急峻な線量勾配が利用される IMRT では,いずれもターゲットに対 する線量集中性が高いこと,照射精度が高度に維持されている必要がある.このことを照射に対する 時間軸で捉えれば,短時間(Intra-fraction)での評価では治療中の動体観察が,長時間(Inter-fraction) では計画時に対する臓器の形状変化や体型変化を把握することができる.さらに複数回の位置照合結 果を評価することによって,PTV のマージン縮小へ向けた精度向上に貢献できる.3. WG のコンセプト
3-1. 目的
IGRT ガイドラインの「QA/QC プログラムや IGRT 実施指針に含むことが望まれる内容」に基づき, 具体的な試験項目,手法の提案をおこなう.
3-2. 内容についての方針及び解釈
3-2-1. 対象装置 試験項目の検討を行うに当たり,装置メーカーの違いにより,装置性能の違い,受け入れ試験の 違い,付属 QA/QC ツールの違いなどにより,すべての装置に対し共通した試験項目を作ることに は無理があり,装置メーカーごと(Elekta,SIEMENS,Varian,Novalis(BrainLAB))について提案 を行う. また,使用する QA/QC ツールは各装置付属のものあるいはできるだけ汎用ツールを用いた試験項 目とした. 3-2-2. IGRT ガイドライン IGRT ガイドラインでは QA/QC について以下のように指針が示されている. 【QA/QC プログラムや IGRT 実施指針に含むことが望まれる内容】 a) レーザー照準器の位置精度に関する項目 b) 位置照合装置の位置精度に関する項目 c) 位置照合装置と放射線照射装置の両座標系の整合性に関する項目 d) 位置照合装置の機械的接触防止インターロックに関する項目 e) 位置照合装置の画質に関する項目 f) 位置照合装置の被ばく線量に関する項目 g) 位置照合解析ソフトウェアに関する項目 h) 治療寝台移動の位置精度に関する項目 i) 位置照合装置と放射線治療管理システムとの通信の信頼性に関する項目 本 WG では,上記各項目について具体的に QA/QC 手法の提案を行うものとする.3-3.IGRT ガイドライン指針の解釈
指針の項目 a, b, c, の解釈,および項目 f について
a) レーザー照準器の位置精度に関する項目 IGRT ガイドラインにおいては,レーザー照準器がアイソセンタに合致している事を前提と しているが,アイソセンタの決定方法については触れられていない. [アイソセンタの定義]アイソセンタについて AAPM report No.47 では次のように定義されている. ・Isocenter
理想的には,ガントリ,コリメータ,カウチの機械的な各回転駆動軸の交点とされる. ・Mechanical isocenter
実際は機械的な回転駆動軸が 1 点で交わることは困難であり回転軸重心として Mechanical isocenter が定義される.
・Radiation isocenter
ガントリ,コリメータ,カウチの Star shot 照射や Winston Lutz test により求めた回転駆動 重心が Radiation isocenter として定義され,Mechanical isocenter を含んでいる必要がある.
[Mechanical isocenter と Radiation isocenter とレーザー照準器の関係]
レーザー照準器は,Mechanical isocenter を示すことが前提となる.レーザー照準器を介し た Mechanical isocenter および Radiation isocenter の一致度がベースラインとして設定される.
AAPM TG-142 では,毎年の点検項目として,定位放射線治療ではベースラインより 1 mm 以内,それ以外はベースラインより 2 mm 以内で一致していることを確認することとされて いる. [レーザー照準器の調整] レーザー照準器の調整方法は,メーカーごとに特徴がある.また,レーザー照準器が受け 入れ試験に含まれていないメーカーもあり,ユーザーの責任で調整を行う場合もある.具体 的には 1) メカニカルフロントポインタを用いて導き出す方法 2) 治療ビームを使った試験で導き出す方法 が考えられる. 1) は Mechanical isocenter である.機械的なツールを用いてアイソセンタを示す方法で,ツ ールの精度が担保されれば日常の試験としては取り入れやすい.前述のように,この位置に レーザー照準器を一致させる場合には,Radiation isocenter との一致を確認しておく必要があ る.また,ガントリ 0 度の状態で調整を行うのであれば,ガントリ回転によるヘッドのダレ などが許容できる範囲であることを確認しておく必要がある.
2) は,Radiation isocenter である.1) とは逆に Mechanical isocenter との一致を確認してお く必要がある.この試験においては,ビームの対称性,平坦度,またコリメータ開度のガン トリ角依存などが影響するので注意が必要である.
本レポートでは,アイソセンタを求める方法に関して具体的な手法は提案しないが,レー ザー照準器はアイソセンタを視覚的に示す指標となる.Radiation isocenter が Mechanical isocenter に対して 1 mm 以内で担保されるよう,レーザー照準器を介して精度管理する必要 がある.
b) 位置照合装置の位置精度に関する項目
なくても(つまり,項目cが担保されていなくても)位置照合装置のみの位置精度の確認は可 能である. kV imaging および EPID を用いる場合,デバイス自体の設置再現性をハード的に評価する. もしくは X 線撮影を伴わず実施する. c) 位置照合装置と放射線照射装置の両座標系の整合性に関する項目 2次元,3次元の両空間において,照射中心に一致したレーザー照準器と位置照合装置が一致 するように調整を行う.その誤差にガントリ角依存性がある場合は,全角度において誤差が 最小となるように調整を行い,その大きさを把握しておく必要がある.また,ガントリ角依 存性を補正するソフトウェア(SIEMENS:EPIDconfiguration,Elekta:Flexmap,Varian:IsoCalなど) を搭載している場合は,そのソフトウェアを使用した上での評価とする. f) 位置照合装置の被ばく線量に関する項目 AAPM TG-75 に詳細に述べられており,これをもとに QA/QC の提案を行っていきたいと考 えるが,今回の WG report への記載は見送り,引き続き検討を行うこととする.
3-4. 頻度,許容値
各項目の頻度,許容値については,AAPM TG-142 を参考にして装置メーカーごとに提案を行 う.4.装置別 IGRT QA/QC
4-1. Elekta
4-1-1. Elekta IGRT システムの構成と特徴
Elekta の IGRT システムは,MV 照合系の iViewGT(EPID)と kV 照合系の X-ray Volume Imaging system (XVI)から構成される(Fig.4-1-1)1).EPID では 2D 撮影,動画撮影が,kV 照合系(kV imaging)では 2D 撮影,透視,Cone Beam CT(CBCT)が可能である.Elekta IGRT システムの特徴として,ガントリ回 転中の装置のダレの影響をソフトウェアで補正できる Flexmap と呼ばれる機能があり,この Flexmap を取得することで,リニアックの照射中心に kV 画像中心を合致させることが可能となる 2-4).その概念図を Fig.4-1-2 に示す.
Fig.4-1-2 Flexmap の概念図 Fig.4-1-1 Elekta IGRT システム
4-1-2.レーザー照準器の位置精度(項目 a)
照射中心の決定方法やレーザーの調整位置は,施設が有するデバイスや施設の考え方により異な る.いずれの手法においても,リニアックの照射中心,レーザーおよび IGRT 画像中心の 3 者の位 置が一致するように調整,管理することが重要である5).
Fig.4-1-3 に示すように XVI システムに標準装備されている Ball Bearing (BB)*を用いて,MV アイ ソセンタ(メーカー標準の BB を用いた照射中心位置の決定手法)2-4,6)もしくは Winston Lutz test (Lutz test)7,8)により照射中心位置を決定し,その位置にレーザーを調整することで,リニアックの照 射中心,レーザーおよび IGRT 画像中心の 3 者の整合性を担保することが可能となる.日々のレー ザーの確認は,始業点検で実施すべき項目であり,アイソセンタ位置および壁の位置にてレーザー のずれをチェックする.
*Ball Bearing:先端に直径 8 mm のスチール球とレーザー調整用ラインを有する XVI 調整用のツー ル 4-1-3.位置照合装置の位置精度(項目 b) 位置照合装置の幾何学的な位置ずれを管理する. 4-1-3-1. MV (EPID) imaging EPID でポータルイメージを取得する際には,ガントリに取り付けたスケール(目盛り)板の画 像を用いて中心座標のキャリブレーションを行う.そのため,MV imaging の精度はスケール板の 取り付け精度に依存する.この章では,スケール板の中心がコリメータの回転中心と一致するこ とを確認する. = 手順 = スケール板を取り付け,コリメータ角度 0 度と 180 度において EPID 画像を取得する(Fig.4-1-4). そして,0 度画像をリファレンスとして,180 度画像とのスケール板の中心位置のずれ量を計測す る.
4-1-3-2. kV imaging
kV imaging では,Flexmap によりガントリ角度ごとの検出器パネルのダレやポジションが自動的 に補正される.そのため,kV imaging の Flat panel detector(FPD)の停止位置と X 線管球のアームの 引き出し位置の不変性を確認する. = 手順 = あらかじめ,ガントリ 0 度において,FPD と X 線管球を引き出した時のポジションにレーザー の位置をマークしておき,日々の業務の中で,レーザーとマーク位置が合致していることを確認 する(Fig.4-1-5).定量的な評価を実施する場合には,ダイヤルゲージを用いることで,Fig.4-1-6 に 示すように FPD 停止位置の再現性が確認できる. Fig.4-1-5 レーザーとマーク位置より FPD 停止位置と X 線管球の引き出し位置を確認 Fig.4-1-4 スケール板の取り付け位置精度の確認
4-1-4.位置照合装置と放射線照射装置の両座標系の整合性(項目 c) 照射中心と IGRT 画像中心の整合性を確認する.照射中心は BB を用いて決定されるが 6),日々 の簡易チェックにおいては,レーザーを用いてファントムをアイソセンタ上に設置する. 4-1-4-1. MV (EPID) imaging ガントリのダレの影響により,照射中心と各ガントリ角度からの MV imaging の画像中心は完全 には一致しない.MV imaging では中心位置のずれを補正する機能は存在しないため,ここでは照 射中心と MV imaging の画像中心のずれが許容範囲内であることを確認する. = 手順 = ガントリにスケール板を取り付ける.照射中心位置に BB を設置し,4 方向のガントリ角度(0 度,90 度,180 度,270 度)から MV imaging を実施する.スケール板の中心と BB の中心位置の ずれを計測する(Table 4-1-1). Table 4-1-1 照射中心と MV imaging の画像中心の整合性の計測結果例 Gantry(°) Horizontal(mm) Vertical(mm)
0 0.2 -0.6 90 0.4 -0.4 180 0.0 0.4 270 0.0 0.1 4-1-4-2. kV imaging kV imaging の画像中心は,Flexmap のデータに基づきパネルのダレが補正される仕組みになって いる.ここでは,照射中心と kV imaging の画像中心のずれ量を確認する1). Fig.4-1-6 ダイヤルゲージを用いた,FPD 停止位置の再現性試験 A:FPD 引き出し時の停止位置精度,B:FOV 変更時の停止位置精度 (M→S) 10 回測定の再現性は,A:±0.02 mm,B:±0.08 mm (1.96σ)であった.
= 手順 =
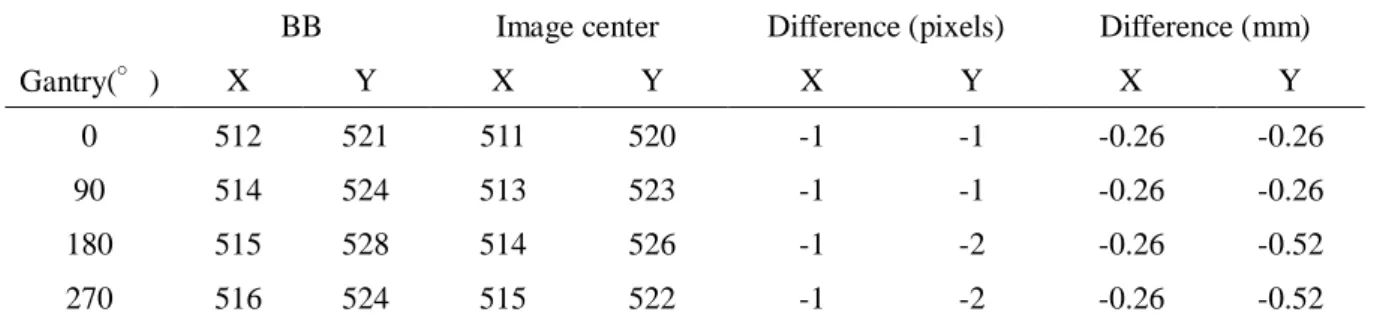
照射中心位置に BB を設置し,4 方向のガントリ角度(0 度,90 度,180 度,270 度)から kV imaging を実施する.kV imaging の画像中心と BB の中心位置のずれを計測する(Table 4-1-2).
Table 4-1-2 照射中心と kV imaging の画像中心の整合性の計測結果例 High resolution mode (1024x1024)では,1 ピクセルは 0.259 mm である.
BB Image center Difference (pixels) Difference (mm)
Gantry(°) X Y X Y X Y X Y 0 512 521 511 520 -1 -1 -0.26 -0.26 90 514 524 513 523 -1 -1 -0.26 -0.26 180 515 528 514 526 -1 -2 -0.26 -0.52 270 516 524 515 522 -1 -2 -0.26 -0.52 4-1-4-3.kV CBCT kV CBCT の画像中心は,Flexmap のデータに基づき FPD のダレが補正される仕組みになってい る.ここでは照射中心と kV CBCT の画像中心とのずれ量を確認する. = 手順 = 照射中心位置に BB を設置し,kV CBCT 撮影を実施する.kV CBCT の画像中心と BB の中心位 置のずれを計測する(Fig.4-1-7). 4-1-5.位置照合装置の機械的接触防止インターロック(項目 d)
iViewGT (MV imaging),XVI (kV imaging)の検出器パネルおよびタッチガードの接触安全スイッチ の動作確認を実施する(Fig.4-1-8)1).
Fig.4-1-7 kV CBCT 画像中心のズレの計測結果 (2009 年 2 月~2010 年 12 月の 226 データ) レーザーに合わせてファントムを設置し,kV CBCT 撮影を行った結果である.照射中心との ずれは概ね±0.5 mm 以内に収まっていた.
4-1-6.位置照合装置の画質(項目 e)
位置照合装置の画質に関する項目,頻度,許容値は AAPM TG-142 report (TG-142)9)や Customer acceptance test (CAT)10,11)を参考に,各施設で必要と判断されるものを選択し,QA プログラムを作成 することが望まれる.TG-142 の画質に関する許容値の多くは Baseline とされており9),通常は CAT で得られた値が基準となる.CAT の方法や許容値は IGRT システムのバージョンにより異なること に注意が必要である.また,CAT の方法を採用する場合には,その方法を忠実に再現しないと許容 値をクリアしないことがあるため,自施設の状況を把握することが重要である.日々の臨床におい ては,アーチファクトの発生等,画質に異常がないことを確認する. 4-1-6-1. MV (EPID) imaging A.スケール ガントリにスケール板を取り付け,iViewGT (EPID)にて撮影を実施する.ソフトウェアの距離 計測の機能を用いて,スケール板の距離を測定する(Fig.4-1-9). B.低コントラスト分解能
CAT マニュアルに従い,Las Vegas ファントムを撮影する.Las Vegas ファントムのホールの視認 性が,CAT の許容値を満たすことを確認する(Fig.4-1-10)11).
Fig.4-1-9 MV (EPID) imaging:スケール
4-1-6-2.kV imaging A.スケール
特に決められたファントムはなく,金尺でサイズが担保された構造物を撮影し,ソフトウェア の距離計測の機能を用いて計測する.
B.低コントラスト分解能
CAT マニュアルに従い,TOR 18FG Leeds ファントムを撮影する.TOR 18FG Leeds ファントム の低コントラストディスクの視認性が,CAT の許容値を満たすことを確認する (Fig.4-1-11)10).
C.空間分解能
CAT マニュアルに従い,TOR 18FG Leeds ファントムを撮影する.TOR 18FG Leeds ファントム の空間分解能チャートの視認性が,CAT の許容値を満たすことを確認する(Fig.4-1-12)10).
Fig.4-1-11 kV imaging:低コントラスト分解能 Fig.4-1-10 MV (EPID) imaging:低コントラスト分解能
4-1-6-3.kV CBCT A.スケール CAT マニュアルに従い,Catphan ファントムを kV CBCT 撮影する.横断画像の垂直,水平スケ ール,矢状断画像のスケールについて,指定された範囲を計測し,CAT の許容値を満たすことを 確認する(Fig.4-1-13)10). B.均一性 CAT マニュアルに従い,Catphan ファントムを kV CBCT 撮影する.均一性モジュール内の画像 中心およびランダムな 3 ヶ所を測定し,下記の式より,最小と最大ピクセル値の最大差(パーセ Fig.4-1-13 kV CBCT:空間分解能 Fig.4-1-12 kV imaging:空間分解能
ンテージ)を計算し,CAT の許容値を満たすことを確認する(Fig.4-1-14)10).
Uniformity (%) = {(Mean(High) - Mean(Low)) / Mean(High)}×100
均一性の CAT 結果例:
Mean pixel value(center):868.78,Location1:875.57,Location2:861.85,Location3:867.46 Difference between the two means:1.57%
C.低コントラスト分解能
CAT マニュアルに従い,Catphan ファントムを kV CBCT 撮影する.Catphan ファントムの低コ ントラスト分解能領域の決められたロッドのピクセル値を測定し,平均値と標準偏差を計算式に あてはめる(Fig.4-1-15)1,10).
ポリエチレンインサート(polystyrene(ps)),および LDPE インサート(LDPE)の平均ピクセ ル値と標準偏差を計測する.ファントム付属のドキュメントより,ピクセル値を CT#est 値に変 換し,CTps,CTLDPE の値を得る.これらの値より,Low contrast visibility を求める.Low contrast visibility の算出式において,SD の平均値に単純平均が用いられているが,本来,SD の平均値は 二乗平均平方根(RMS)でなければならない.ここでは,CAT との不変性を評価することが目的で あるため,CAT で用いられている式を採用する.
Low contrast visibility (%)={(CTps- CTLDPE)/10}/{(Meanps- MeanLDPE)/((SDps+SDLDPE)/2)}
低コントラスト分解能の CAT 結果例: CTps= -35, CTLDPE= -100
Polystyrene:Mean pixel value 852.53,SD 8.68,CT #est -35 LDPE:Mean pixel value 816.93,SD 7.81,CT #est -100 Value of low contrast visibility:1.51%
D.空間分解能
CAT マニュアルに従い,Catphan ファントムを kV CBCT 撮影する.Catphan ファントムの空間 分解能領域のチャートの視認性が CAT の許容値を満たすことを確認する(Fig.4-1-16)1,10).
4-1-6-4.フラットパネルディテクタ(FPD)のキャリブレーション
FPD のキャリブレーションは,定期点検時に必要性に応じてサービスエンジニアにより実施さ れる.MV imaging と kV imaging で具体的なキャリブレーションの手順は異なるが,大別して, Bad pixel map(使用できなくなった素子を排除し,周囲の正常な素子のデータの平均値で置き換 える補正データ)と,ゲインキャリブレーション(パネルは複数のユニットから構成され,各ユ ニットの感度を調整し,均一なデータを得るための補正データ)の 2 つの作業からなる.検出器 パネルの動作確認を行い,検出器パネルの位置を微調整した場合には,Flexmap(照射中心に kV imaging の画像中心を合致させる補正データ)を取得する. Fig.4-1-16 kV CBCT:空間分解能 Fig.4-1-15 kV CBCT:低コントラスト分解能
4-1-7.位置照合解析ソフトウェア(項目 g) ファントムを既知の位置だけ移動させ,ソフトウェア単体の位置誤差の検出精度を確認する. 臨 床にてオートマッチングを使用する場合には,臨床の環境に近い状態でオートマッチングの検出能 力を確認することが望ましい.また,オートマッチング後は,自動照合結果を視覚的に確認するこ とが重要である. 4-1-7-1.kV CBCT の位置検出精度の確認 BB を既知の位置だけ移動させ,ソフトウェア上での位置誤差の検出精度を確認する (Fig.4-1-17). = 手順 = ① あらかじめ BB を治療計画 CT で撮影し,治療計画装置で作成した基準画像を XVI に転送する. ② BB を照射中心に配置し,kV CBCT 撮影する.次に,BB のマイクロメータを利用して BB を 既知の量だけ移動させ,再度 kV CBCT 撮影を実施する. ③ BB の位置ずれ量を計測し,位置検出精度を評価する. 4-1-7-2.オートマッチングの検出精度の確認 臨床の環境に近い人体ファントムを使用し,オートマッチングの精度を確認する.kV CBCT 撮 影時の人体ファントムの位置は一定とし,治療計画装置側で既知のずれを発生させた基準画像を Fig.4-1-17 kV CBCT の位置検出精度の計測手順
複数作成する.両者のオートマッチングの結果と治療計画装置のずれ量を比較することで,オー トマッチングの検出精度を確認する(Fig.4-1-18). = 手順 = ① 人体ファントムを治療計画 CT で撮影し,治療計画装置へ転送する.治療計画装置にて,アイ ソセンタが異なる基準プランを複数作成し,XVI へ転送する. ② 人体ファントムを kV CBCT 撮影後,あらかじめ転送した各々の基準プランに対してオートマ ッチングを実施し,治療計画装置側で発生させたずれ量と比較する. 4-1-8.治療寝台移動の位置精度(項目 h) 治療寝台単体の位置精度を確認する.治療寝台のデジタル数値の移動量と金尺で計測した実際の 移動量の関係を調べる.なお,この試験は LONG, LAT, VERT の各方向について,プラスとマ イナスの両方向の移動精度を確認する(Fig.4-1-19). 4-1-9.位置照合装置と放射線治療管理システムとの通信の信頼性(項目 i) 位置照合装置と他の放射線治療システム間で通信データが正しく転送,認識できることを確認す る.受入試験およびバージョンアップの際に実施する. また,臨床においては,技師,医師のサイン,寝台シフト量など位置照合結果の記録を残すこと が重要である. Fig.4-1-19 治療寝台移動の位置精度 Fig.4-1-18 人体ファントムを用いたオートマッチングの検出精度測定
4-1-10.総合的な位置精度の検証 Catphan ファントムの中心付近の位置にマーキングを入れ,治療計画 CT で撮影する.その後,治 療計画装置に転送し,Catphan ファントムのマーキング位置をアイソセンタに設定,XVI にデータ を転送する.治療室にて,レーザーに Catphan ファントムのマーキング位置を合わせ,kV CBCT 撮 影する. 治療計画 CT と kV CBCT の画像をマニュアルで合わせ込み,その時の Translation と Rotation の位置誤差を求め,総合的な位置精度として評価する(Fig.4-1-20). * 総合的な位置精度に含まれる誤差要因 ・CT 装置のスキャン条件の影響 ・治療計画装置と位置照合装置の位置の整合性 ・ファントムの設置精度 ・レーザー照準器の位置精度 * 総合的位置精度検証の一例) Translation (cm):X 0.01,Y -0.03,Z -0.06 Rotation (dg):X 0.2,Y 0.1,Z 0.3 Fig.4-1-20 総合的な位置精度の検証
参考文献
1) Lehmann J, Perks J, Semon S, et al. Commissioning experience with cone-beam computed tomography for image-guided radiation therapy. J Appl Clin Med Phys 2007; 8(3): 2354.
2) Sharpe MB, Moseley DJ, Purdie TG, et al. The stability of mechanical calibration for a kV cone beam computed tomography system integrated with linear accelerator. Med Phys 2006; 33(1): 136-144.
3) Bissonnette JP, Moseley D, White E, et al. Quality assurance for the geometric accuracy of cone-beam CT guidance in radiation therapy. Int J Radiat Oncol Biol Phys. 2008; 71(1 Suppl): S57-61.
4) Balter J, Benedict S, Bissonnette JP, et al. AAPM Task Group 104 report: The Role of In-Room kV X-Ray Imaging for Patient Setup and Target Localization. 2009.
5) 日本医学物理学会 QA/QC 委員会.画像誘導放射線治療臨床導入のためのガイドライン(略称: IGRT ガイドライン).医学物理 2010; 30: 49-53. 6) Eelkta Corrective Maintenance Manual for XVI R.3.5 to R.4.2 (Document No.4513 370 2140 03).
7) Lutz W, Winston KR, Maleki N. A system for stereotactic radiosurgery with a linear accelerator. Int J Radiat Oncol Biol Phys 1988; 14(2): 373-381.
8) 辰己大作,中田良成,堤 真一,他.マイクロマルチリーフコリメータを用いた定位放射線照射 システムの機械的精度評価.日放技学誌 2011; 67(10): 1267-1274.
9) Klein EE, Hanley J, Bayouth J, et al. AAPM Task Group 142 report: quality assurance of medical accelerators. Med. Phys 2009; 36: 4197-4212.
10) Elekta Customer Acceptance Tests for XVI (Document No.4513 370 2286 02). 11) Elekta Customer Acceptance Tests for iViewGT (Document No.4513 370 1945 04).
Elekta IGRT QA *1) 臨床使用する日に実施 *2) ファントムをレーザーに合わせて設置する *3) ファントムには Ball Bearing を使用し,照射中心位置を求めて設置する *4) CAT の許容値もしくは,ベースラインの計測データとする *5) 治療計画 CT から位置照合系の撮影までを含めた総合的な試験 QA 項目 頻度 許容値 a) レーザー照準器の位置精度 Daily*1) ≦1 mm b) 検出器パネルの位置精度 ≦1 mm d) 検出器パネルの衝突に対するインターロック Functional MV imaging (EPID) c) 照合系座標と照射系座標の一致*2) ≦1 mm (ガントリ 0 度のみ) kV imaging c) 照合系座標と照射系座標の一致*2) ≦1 mm (ガントリ 0 度のみ) kV Cone-beam CT c) 照合系座標と照射系座標の一致*2) ≦1 mm a) レーザー照準器の位置精度*3) Monthly ≦1 mm h) 治療寝台移動の位置精度 ≦1 mm MV imaging (EPID) b) スケール板の位置精度 ≦1 mm c) 照合系座標と照射系座標の一致*3) ≦1 mm (ガントリ角度 4 方向) e) 画質(スケール,低コントラスト分解能) ベースライン*4) kV imaging c) 照合系座標と照射系座標の一致*3) ≦1 mm (ガントリ角度 4 方向) e) 画質(スケール,低コントラスト分解能,空間分解能) ベースライン*4) kV Cone-beam CT c) 照合系座標と照射系座標の一致*3) ≦1 mm e) 画質(スケール,均一性,低コントラスト分解能,空間分解能) ベースライン*4) MV imaging (EPID) Annually g) 位置照合解析ソフトウェアの精度 ≦1 mm kV imaging g) 位置照合解析ソフトウェアの精度 ≦1 mm kV Cone-beam CT g) 位置照合解析ソフトウェアの精度 ≦1 mm i) 総合的な位置精度,データ転送の確認*5) ≦1 mm
4-2.SIEMENS
4-2-1.SIEMENS IGRT システムの構成と特徴
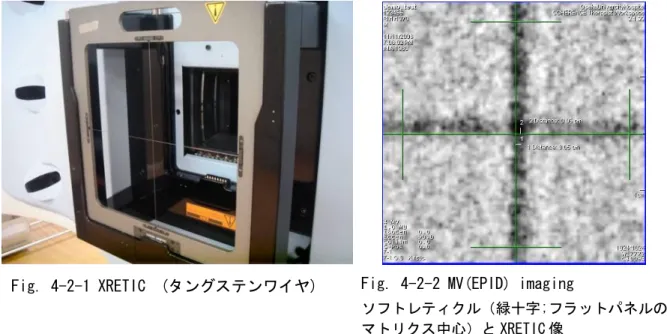
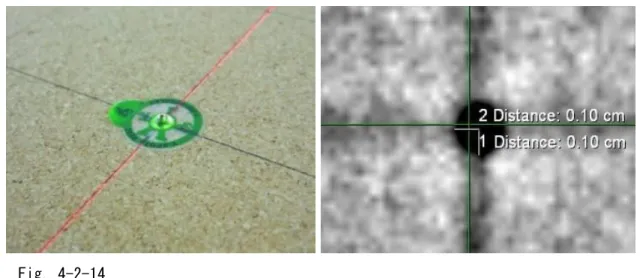
SIEMENS の IGRT システム は,2 次元であれば MV(EPID) imaging,3 次元であれば MV CBCT が 可能であり,両者とも同一の EPID で画像を取得する.また,撮影用ビームは照射用ビームと同一の もの(ただし 2 種類の X 線が利用可能な装置の場合は低エネルギー)が使用される. 1 つのビームと 1 つの検出器の組み合わせとなるため,ビーム軸と撮影中心が同一となるように EPID の位置調整を行うこととなる.以下の方法で照射系(治療機)座標と照合系(IGRT)座標のキ ャリブレーションを行っている. 4-2-1-1.EPID 位置キャリブレーション1)(据付時,Annually) EPID の物理的な設置位置は患者位置計測に大きく影響を及ぼすため,リニアックのメカニカル アイソセンタに対し,慎重に据付が行われる. これには直交するタングステンワイヤ十字板(Fig. 4-2-1;XRETIC)が使用される.XRETIC はガン トリのアクセサリスロットに挿入されるようになっており,その交点はビーム中心軸(コリメー タ回転中心軸)上になるよう慎重に調整が行われている. まず,据え付けでは,EPID のマトリクス中心を,メカニカルアイソセンタを通るビーム軸に一 致させる作業が行われる.マトリクス中心は,位置照合装置のソフトウェア上にてソフトレティ クル(Fig. 4-2-2;緑十字)として確認が可能であり,これが撮影中心を示している.ガントリ角 0 度にて XRETIC を撮影し,ソフトレティクルと一致するよう EPID の機械的位置調整作業を行う. つまりソフトレティクルと XRETIC 像を一致させることにより,EPID のマトリクス中心はビーム 中心軸上に配置される. メーカー許容値は各軸 2 mm2)であるが,AAPM TG-1422)において SRS/SBRT を行う際の許容値が 1 mm であることに留意する必要がある.国内ガイドライン4)においても,位置照合装置と治療機 座標系の一致は各軸 1 mm 以内が推奨されている.
Fig. 4-2-1 XRETIC (タングステンワイヤ) Fig. 4-2-2 MV(EPID) imaging
ソフトレティクル(緑十字;フラットパネルの マトリクス中心)と XRETIC 像
また,ガントリが回転した際は,EPID の自重によるダレが発生することがあるため,アクセサ リホルダーに XRETIC を取り付けた状態で画像取得を行い,ダレの補正テーブルを取得する.
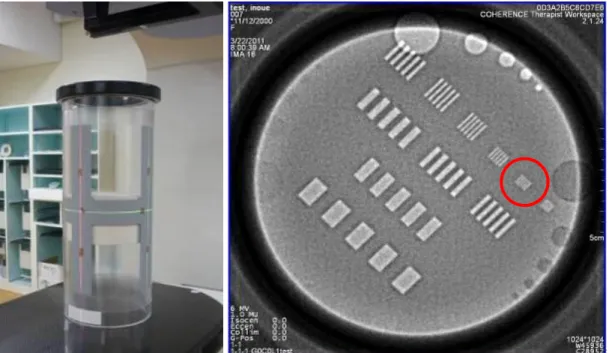
具体的には,SID(Source imager distance)130,140,150,160 cm とガントリ角 0,90,180,270 度の組み合わせで撮影を行い,Fig. 4-2-3 に示すように EPID のマトリクス中心と XRETIC 交点の ミスアライメントを計算し,ダレ補正テーブルとして保存している. ガントリ角 0,90,180,270 度にて MV(EPID) imaging 時に,参照画像が存在する場合のみ自動 的にダレ補正テーブルが適応され取得画像が表示される. また,SID145 cm 固定,ガントリ角 0,45,90,135,180,225,270,315 度の組み合わせにて XRETIC 像を取得する.こちらは MV CBCT の再構成用のテーブルとして使用される. 4-2-1-2.MV CBCT ジオメトリキャリブレーション1),2) (据付時,Annually) MV CBCT は,SID145 cm 固定ガントリ角 270 度~110 度の 200 度回転で 200 枚の Portal 画像を取 得し,バックプロジェクションによりボリュームイメージの再構成を行う. この再構成を行うために 3 次元(ボクセル)でのポイントと 2 次元(ピクセル)のポイントとの幾何 学的な位置が関連付けされる必要がある. 2 種の大きさの金属ビーズが螺旋状に配置されたジオメトリファントム(Fig. 4-2-4)を撮影するこ とにより,200 枚のプロジェクション画像(1 度につき 1 画像)を取得し,ジオメトリファントム の金属ビーズ位置(ボクセルでのポイント)と Image plane 上のビーズ画像位置(ピクセルでのポイ ント)との幾何学的な位置の関連付けが行われる(Fig.4-2-5). なお,ジオメトリファントムのセットアップは慎重に行い,ファントム上の罫書き線と XRETIC 投影像が一致した状態で撮影を行う必要がある.また,ジオメトリキャリブレーションでは回転 の補正も行われる.キャリブレーション結果の妥当性を評価するため,水を張った水槽等を撮影 することで,水平に対し適切な回転補正が行われているかを簡便に確認可能である(Fig. 4-2-6). 水面付近の冠状断で画像の回転が確認しやすい. Fig. 4-2-3 各ガントリ角,SID での平行と回転成分の補正テーブル
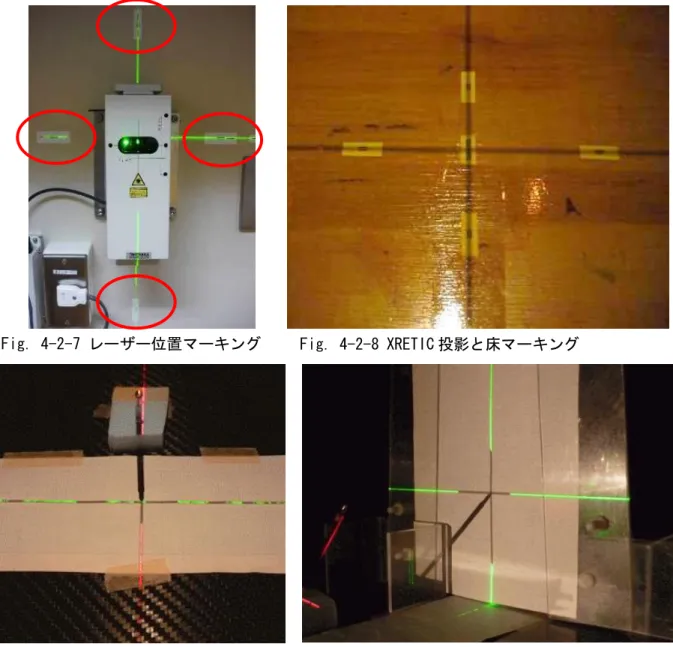
4-2-2.レーザー照準器の位置精度(項目 a) メカニカルアイソセンタが据付時に調整され,照射系中心との距離が装置スペックに収まってい ることを確認の上,治療機座標中心の指示器としてのレーザー照準器の位置を決定する.レーザー 位置が決まれば,壁,床にレーザー位置をマーキングし,管理を行う. このレーザー位置に対し,メカニカルポインタおよび照射系中心の一致の確認を行う. 4-2-2-1.壁,床マークとレーザーの一致の確認(Daily) 始業時にレーザーポインタ位置が壁マークと一致していることを確認する(Fig. 4-2-7). レーザーの種類によっては,通電時間や温度変化により指示位置が変動するものがあるため,自 施設のレーザー照準器の特性を把握しておく必要がある. 4-2-2-2.メカニカルポインタとレーザーの一致の確認(Daily,Monthly) メカニカルポインタとして,XRETIC を使用する. まず,XRETIC 交点が,コリメータ回転中心軸上に設置され,コリメータ位置,ガントリ位置に 関わらず一点を指示するよう調整された状態であることを確認する.Fig. 4-2-8 に示すように,床 にマーキングしておくと Daily にて確認が容易である. Fig. 4-2-4 ジオメトリファントム Fig. 4-2-5 Phantom 上のポイントと 画像上のポイントの関連付け Fig. 4-2-6 水槽等撮影による回転補正確認の例
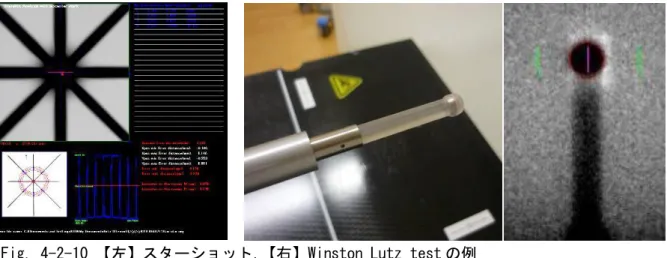
マーキングから XRETIC の影がずれた場合,光軸のズレ,XRETIC 交点のコリメータ回転中心軸 からの逸脱が考えられるが,コリメータを回転させた際,同一位置で回転しているならば,光軸 のズレが疑われる.XRETIC 交点の回転が,歳差運動する場合は,XRETIC 交点のコリメータ回転 中心軸からの逸脱が疑われる. Monthly にて,XRETIC とレーザーの一致の確認を行う.本作業前にガントリ角を,水準器等を 用い,慎重に調整する必要がある.複数のガントリ角で,コリメータ回転を行い両者の一致を方 眼紙上で確認する(Fig. 4-2-9).TG-142 では許容値は 1 mm とされている. 4-2-2-3.レーザーと照射系中心との一致(Monthly) レーザーを基準としたスターショットによる確認(ガントリ回転およびコリメータ回転)や複数 角度の Winston Lutz test(Lutz test)による確認(Fig. 4-2-10)が一般的である.絞り停止位置の非対称性
Fig. 4-2-8 XRETIC 投影と床マーキング
Fig. 4-2-9 XRETIC 投影とレーザーの一致確認
例(レーザー交点にボールペンの芯を配置している) Fig. 4-2-7 レーザー位置マーキング
が問題となるが,コリメータ角 0,180 度などで撮影することで絞りの非対称性については相殺し た評価が可能である.据付時の確認方法としてはスターショットが用いられる.
4-2-3.位置照合装置の位置精度 (項目 b)
位置照合装置の幾何学的な位置精度の管理を行う.
SIEMENS 社の位置照合デバイス は,MV(EPID) imaging および MV CBCT であるが,検出器は共 通の EPID を使用する.EPID の停止位置の定常性について管理を行う.
EPID の据付については,4-2-1 にて述べたとおりであるが,EPID 据付初期位置に関して,エンコ ーダとポテンショメータにて幾何学的停止位置が記録されており,始業時に EPID 停止位置をイニ シャライズすることにより定常性の向上が図られている.
4-2-3-1.EPID 停止位置の定常性の確認(Daily)
据付時に使用頻度の高い SID で XRETIC の投影位置をマーキングして管理を行う(Fig. 4-2-11). たとえば,SID146 cm にて EPID 停止位置が 1 mm ずれれば,SAD が 100 cm では約 0.7 mm のズレ となる.
4-2-3-2.Source imager distance(SID)の定常性の確認(Monthly)
正確な SID の確認は困難であるが,レーザー照準器を仲介し,シャドウトレイとレーザー間距離, レーザーと EPID 間距離を測定することにより定常性の確認が可能である(Fig. 4-2-12).
Fig. 4-2-10 【左】スターショット,【右】Winston Lutz test の例
SID の変化は EPID のピクセルスケーリング(距離/pixel)に影響を及ぼす.たとえば SID145 cm が実際の距離は SID146 cm であった場合,ピクセルスケーリング上は約 0.7%の誤差が生じること となる.据付時 SID からの距離の乖離の許容値は,AAPM TG-58 では 1 cm5),UCSF は 0.5 cm1)と している.MV CBCT 撮影時の SID145 cm,MV(EPID) imaging 時に使用頻度の高い任意の SID に ついて計測を行う. 4-2-4.位置照合装置と放射線照射装置の両座標系の整合性(項目 c) 撮影(IGRT)座標と照射(治療機)座標の中心の一致を確認する. 4-2-4-1.MV(EPID) imaging(Daily,Monthly) TG-142 では Daily にて1方向の確認,Monthly にて 4 方向の確認が推奨されるが,複数方向の確 認を Daily で行うことも容易である.使用頻度の高い SID にて確認を行う. Fig. 4-2-13 【左】レーザーと一致させた Ball Bearing
【右】 MV(EPID)imaging シフト量はソフトレティクル(画像中心)と XRETIC の変位量 (Image Shift) Fig. 4-2-12 レーザー照準器を利用した EPID 停止位置(Vertical 方向)の定常性確認
=手順= アクセサリスロットに XRETIC を挿入し画像を取得する.XRETIC 撮影像とソフトレティクルの 一致度が,メカニカルアイソセンタを通るビーム軸と照合装置の撮影中心の一致度となる(4-2-1-1 参照).この際,撮影画像が参照画像と紐付いていない場合,ダレ補正テーブルは適応されないこ とに注意を要する. レーザー照準器指示位置も含めて評価する場合は,レーザーを代替する Ball Bearing(BB)を設置 し撮影を行う(Fig. 4-2-13,4-2-14).Fig. 4-2-14 に示す方法は金属球とレーザーの一致をかなり慎重 に確認する必要がある. 4-2-4-2.MV CBCT(Daily)
Fig.4-2-13 に示す BB やその他の商用ツール,付属の Image quality phantom(Fig. 4-2-15)を使用 する.ここでは Image quality phantom の例を示す.Image quality phantom には,金属ビーズが 3 平 面(12 時,3 時,6 時,9 時の位置)に計 12 個内蔵されており,平面間のビーズ距離は 10 cm で, 1 平面における中心から各ビーズまでの距離は 9.525 cm である(Fig. 4-2-16).あらかじめ,Image quality phantom を計画用 CT にて撮影し,ビーズ位置を確認しておくとよい.
Fig. 4-2-15 Image quality phantom Fig. 4-2-16 Image quality phantom 金属ビーズ配置 平面間距離は 10 cm,平面内距離は中心より 9.525 cm Fig. 4-2-14
【左】レーザーと一致させた 2 mm 金属球 (BEEKLY 社)
=手順=
Image quality phantom は,設置の回転がないかを慎重に確認したうえで,罫書き線(センター面)と レーザーを一致させる(メーカー資料2)
では,罫書き線と XRETIC 投影像を合わせると記されてい るが,ここでは 4-2-2-2 にて,レーザーと XRETIC の一致確認がなされていることを前提としてレー ザーを使用している) .
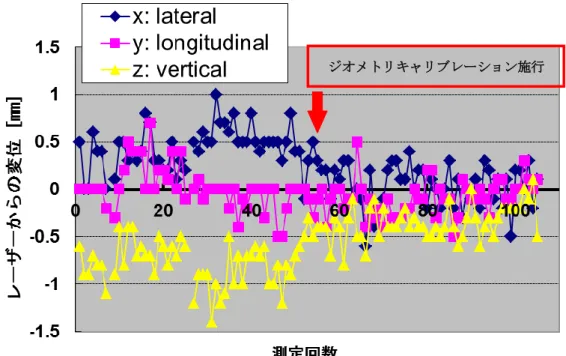
Fig. 4-2-18 Winston Lutz test (n=16),スターショット(n=10),MV CBCT 撮影中心(n=55)の分布 X: lateral,Y: longitudinal,Z: vertical [mm]
Y
Z
X
X
メニューバー “Reference point” にて,ポインタを作成 し,任意の位置の座標が表示可能(MV CBCT 画像中心が原点). Fig. 4-2-17 センター面でのレーザー(ビーズ交点)と画像再構成中心の差 (ここで表示される座標系は DICOM 座標系であることに注意する)センター面のビーズ交点をレーザー交点の代替とし,撮影中心とのズレを位置照合ソフトウェア 上にて確認する(Fig. 4-2-17).メーカー許容値 2)は±2 mm,国内ガイドラインおよび TG-142 の
SRS/SRT 許容値は±1 mm である.なお,照合装置のソフト上で表示される座標系は,DICOM 座 標系であるため注意を要する(たとえば DICOM 座標での Y 方向は,Vertical 方向であり,符号も 地面側が+方向である).
Fig. 4-2-18 に 4-2-2-3 のレーザーと照射中心との一致(Monthly)とあわせた結果を示す.(DICOM 座標系は IEC-61217 座標系に変換を行っている.)MV CBCT 撮影中心の Vertical 方向はレーザーに 対して,最大で 0.8 mm の乖離を示したが,その他は概ね 1 mm 立方体内に収まっているのがわか る.
4-2-4-3.MV(EPID) imaging,MV CBCT(Annually)
定期的メンテナンスとして4-2-1-1,4-2-1-2に示すEPIDのダレ補正テーブル再取得,およびMV CBCT用ジオメトリキャリブレーションを行う.(メーカー推奨は半年毎2)) 撮影中心が経時変化により許容値外となった場合も作業を行う.Fig. 4-2-19にジオメトリキャリ ブレーション前後のMV CBCT撮影中心の経時変化を示す. なお,上記作業後は,前述の4-2-4-1,4-2-4-2のIGRTの撮影中心の確認,および後述の4-2-7位置 照合ソフトウェアに関する項目についても確認を行う. 4-2-5.位置照合装置の機械的接触防止インターロック(項目 d)
始業前に Daily で,EPID の衝突インターロックが機能するか確認する.Fig. 4-2-20 に衝突感知セ ンサーの位置を示す.TG-142 では始業前に機能することを確認することが推奨されている.
Fig. 4-2-19 ジオメトリキャリブレーション前後の MV CBCT 撮影中心の経時的変化
4-2-6.位置照合装置の画質(項目 e)
TG-142では,Monthlyの項目となり,受け入れ試験の値をBaselineとして管理を行うとされている が,メーカー許容値2)を参考に管理が可能である.
4-2-6-1.MV(EPID) imaging (Annually)
QC-3V phantom(Fig. 4-2-21)を使用する.装置の付属品ではなくMonthlyは困難であるため頻度を Annuallyとした.また,解析ソフトはService modeに入る必要があるため,ユーザーのみでは本作 業は行えない. =手順= QC-3V phantomをEPID上に設置し,撮影を行う.Coherence Therapist上の専用ソフトにて, Contrast/noiseおよびResolutionの解析を行う. Optiview1000STでは,Contrast/noise許容値は600.0,Resolution(50%RMTF)の許容値は0.41 lp/mmに 設定され,Optiview500では,Contrast/noise許容下限は720,Resolutionの許容値は0.33 lp/mmに設定 されている2).
定性的な評価であれば,Image quality phantomを縦に設置し撮影を行うことで,目視にて分離可能 なBar groupを簡易的に管理可能である.(Fig. 4-2-22) Fig. 4-2-21 QC-3V phantom画像と専用ソフトでの処理結果 Fig. 4-2-20 EPID と衝突感知センサーの位置 前面 4 箇所 はさみ込み防止 2 箇所
4-2-6-2.MV CBCT (Monthly)
付属のImage quality phantomを使用する.Image quality phantomは,Solid water(均質部),2種類 の低コントラスト分解能,空間分解能の4つのセクション(Fig. 4-2-23)に分かれている.
=手順=
Image quality phantomの罫書き線とレーザーを一致させ,設置の回転がないかを慎重に確認したう えで撮影を行う.推奨撮影条件は,15 MU / 256x256 / Smoothing head and neck filter / 1 mmスライス 厚2)である.
Fig. 4-2-23 Image quality phantomの各セクション セクション 1 : Solid water(均一性,画像ノイズ) セクション2,4 : 低コントラスト分解能
セクション 3 : 空間分解能
Fig. 4-2-22 Image quality phantom(縦設置)と撮影画像 6 MV 装置では 0.8 lp/mm まで確認可能
A.セクション1での確認
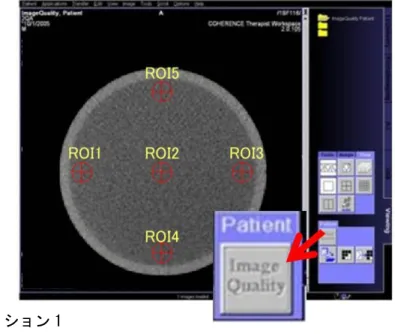
Coherence Therapistの2D viewer上で,スライス番号185を使用し,均質性,画像ノイズ,アーチ ファクトの有無を確認する2).Fig. 4-2-24に示すROI2(ファントム中心)のMeanとSD,各ROIとROI2 のMeanの差を確認する. 均一性の評価として,4 MV,6 MVの装置ともにROI2のMeanは-30~42,各ROIとROI2のMean の差が±80以内であることを確認する.画像ノイズの評価として,4MV装置でのROI2のSDは26 ~34,6MV装置でのROI2のSDは26~42を許容とする2). B.セクション2と4での確認
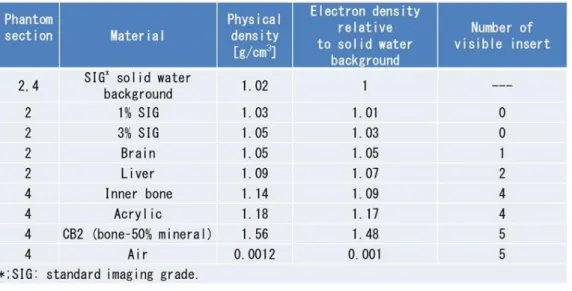
Coherence Therapistの3D viewer上で,低コントラスト分解能の確認を行う(Fig. 4-2-25 a,b) 1-2). まず,MPR厚を5 mmとし,次に,画像ウィンドウレベルの調整を行う.全材質が含まれるよう にファントム画像内にROIを設定し,Meanを画像のウィンドウ中心,最大値と最小値の差をウィ ンドウ幅として設定する2). 1材質につき,5つのサイズが配置され,それぞれサイズは20,10,7,5,3 mmである.目視に て確認できる材質の個数が,それぞれTable4-2-11-2)のとおりであるか確認する2). C.セクション3での確認
Coherence Therapistの2D viewer上で,スライス番号137を使用し,空間分解能の確認を行う.セ クション2と4の確認と同様に画像ウィンドウレベルの調整を行う.Bar group6(0.3 lp/mm)(Fig. 4-2-25c,Table4-2-2)1-2)まで分解可能であるか確認を行う2).
Fig. 4-2-24 セクション 1
均質性,画像ノイズ,アーチファクトの確認(図中のボタンにて,CT 値の mean と SD が自動 で表示される).
Table 4-2-1 セクション2,4の材質の物理密度
Solid waterに対する相対電子密度および画像上で認識できる各材質の個数1-2)
Fig. 4-2-25 Image quality phantomセクション2-4 (a) 低コントラスト分解能:セクション2
(1)1%SIG (2)3%SIG (3)brain (4)Liver (b) 低コントラスト分解能:セクション4
(5)inner bone (6)acrylic (7)air (8)CB2 各材質の直径は20,10,7,5,3 mmである.
(c) 空間分解能:セクション3 それぞれのBar group番号はTable4-2-2に対応
4-2-6-3.フラットパネルディテクタ(FPD)のゲインキャリブレーション
FPD のダイオード動作差異を補正する目的で行う.ゲインキャリブレーションを行うことで画質 を保全し,アーチファクト(Fig. 4-2-26)発生を抑える.
A. Dead pixel mapping(Annually:3 ヶ月~半年) 本作業は,サービスマンによる保守作業である. ノイズ(SD)が全体の SD の 6 倍より大きい素子,感度のオフセット値が周囲の素子と比べ,1% 以上異なった素子は,周囲のアクティブな素子の平均値に置き換えられる. B. MV(EPID) imaging(Monthly:2 回1)) SID,線量率,照射野サイズ,MU を変えて行う.専用の曝射シーケンスを使用する. C. MV CBCT(Monthly:2 回1)) 15(または 8 MU)と 60 MU にて行われる.専用の曝射シーケンスを使用する. Fig. 4-2-26 デッドピクセル起因のアーチファクト
(SIEMENS MVision Physicist Self-Led Training2)より引用)
Table 4-2-2 セクション 3(空間分解能) Bar group 番号と lp/mm 1)
4-2-7.位置照合解析ソフトウェア(項目 g) 位置照合ソフトウェアそのものの誤差を解析する.既知のサイズのファントムやスケールを用い る.4-2-1-1,4-2-1-2,(4-2-4-3)に示す EPID のダレ補正テーブル再取得,および MV CBCT 用ジ オメトリキャリブレーションを行った場合は,4-2-4-1,4-2-4-2 の IGRT の撮影中心の確認とあわ せて実施する.その際,同一ファントム位置で複数回の撮影を行い画像再構成の再現性について も確認を行う. 4-2-7-1.MV(EPID) imaging A. スケールの測定(Annually) =手順= 使用頻度の高い SID にてスケール板を撮影し,位置照合ソフトウェア上の距離測定ツールにて既 知のスケール間距離を計測する(Fig. 4-2-27).撮影時にアイソセンタ面に方眼紙等を配置し,金 属ワイヤを既知の位置に慎重に配置することで,スケール板が示す位置も確認できる. B.相対的な移動量の測定(Annually) 撮影したスケール板の撮影像を参照画像として保存し,portal 画像か参照画像いずれかの濃度を Fig. 4-2-28 照合ソフト上での相対的移動量測定の一例 Deno Soutaiteki ① Save as reference ② 濃度反転処理 ③ 既知量移動(スケールの目盛分) ④ ソフトウェア算出量確認
①
②
①
③
②
①
④
③
②
①
Fig. 4-2-27 スケール板撮影による既知量の測定 距離測定ツールにて測定反転処理する.これにより重ね合わせ画像がサブトラクション画像となる.この状態で画像上の スケール板を既知量(スケールの目盛分)移動させ,ソフトウェアが算出するオフセット量と一 致するか確認を行う(Fig. 4-2-28).使用頻度の高い SID について確認を行う. 4-2-7-2.MV CBCT A.画像歪みの測定(Monthly) 4-2-6 の画質に関する項目にて撮影する画像を使用して行うと効率的である.
Image quality phantom を撮影し,12 点の金属ビーズ位置の測定をおこなう(Fig. 4-2-16,Fig. 4-2-29). 金属ビーズの配置位置は既知であり,既知量との差のメーカー許容値は 2 mm2)である.Fig. 4-2-30 に計測結果を示す.ただし,この結果には,レーザーやファントム設置精度も含まれる.
12’ 3’ 6’ 9’
12’ 3’ 6’ 9’
12’ 3’ 6’ 9’
Center
Head
Feet
Fig. 4-2-30 MV CBCT 画像辺縁での金属ビーズ配置既知量からの変位 Mean±1SD (n=17) X: lateral,Y: longitudinal,Z: vertical [mm]Fig. 4-2-29
B. MV CBCT 相対的移動量の測定(Annually)
まず,計画用 CT にて Image quality phantom 画像を取得し,Coherence Therapist 転送しておく. 次に MV CBCT 画像を取得し,照合ソフトウェア上で Image quality phantom の金属ビーズ位置が 一致するように照合し,位置誤差を算出する.次に MV CBCT 画像のビーズ位置と計画 CT 上の 別の金属ビーズが一致するようにシフトさせる.金属ビーズの配置間隔は既知であるので,相対 的な位置誤差が既知量と一致することを確認することで照合ソフトウェア自体の誤差を確認す る(Fig. 4-2-31). Fig. 4-2-32 カウチ移動量とカウチ表示の確認例 計画 CT のヘッド面と MV CBCT のセンター面での ビーズ位置を一致させた状態 (既知量 10 cm の移動) 相対移動量は 10 cm 計画 CT と MV CBCT のビーズ位 置を一致させた状態 Fig. 4-2-31 MV CBCT 相対移動量算出例
4-2-8.治療寝台移動の位置精度(項目 h)(Monthly) 寝台位置表示(コンソールと寝台表示)と実際の移動量に関しては,レーザーを介し方眼紙,金 属製定規で確認可能である.Lateral,Longitudinal,Vertical 方向について,プラス方向移動および マイナス方向へ移動させ,カウチの移動精度確認(Fig. 4-2-32)を行う.メーカー許容値は 0.5 mm である.TG-142 では SRS/SBRT は 1 mm とされている.また,コンソールとテーブルの表示の一致 についても確認を行う. 4-2-9.位置照合装置と放射線治療管理システムとの通信の信頼性(項目 i) 据付時,ソフトウェアのバージョンアップ時に行う必要がある. 患者の属性データ,座標が正しく転送されているか,DRR(計画 CT)と Portal 画像(MV CBCT 画像)が正しくレジストレーションされるかなどを確認する.
計画用 CT にて,Image quality phantom 等を撮影し,位置照合の参照画像として登録を行い,計画 CT-治療計画装置-画像照合までの End to End の確認を行う.また,始業点検に流用することも可能 である.ただし,計画 CT 時の Image quality phantom 等の設置が系統誤差を生む原因になるので慎 重にセットアップを行う必要がある(Fig. 4-2-33)2).
参考文献
1) Gayou O, Miften M. Commissioning and clinical implementation of a mega-voltage cone beam CT system for treatment localization. Med Phys 2007; 34: 3183-3192.
2) SIEMENS MVision Physicist Self-Led Training
3) Klein EE, Hanley J, Bayouth J, et al. AAPM Task Group 142 report: quality assurance of medical accelerators. Med. Phys 2009; 36: 4197-4212.
4) 日本医学物理学会 QA/QC委員会.画像誘導放射線治療臨床導入のためのガイドライン(略称: IGRTガイドライン).医学物理 2010; 30: 49-53.
5) Herman MG, Balter JM, Jaffray DA, et al. Clinical use of electronic portal imaging: Report of AAPM radiation therapy committee task group 58. Med Phys 2001; 28: 712–737.
Fig. 4-2-33 計画画像取得と患者属性,画像データ転送,および画像照合の流れ (SIEMENS MVision Physicist Self-Led Training2)より引用)
SIEMENS IGRT QA QA 項目 頻度 許容値 a) レーザー照準器の位置精度(壁マークとの一致) Daily ≦1 mm b) EPID 停止位置(XRETIC とパネルマークの一致) ≦1 mm d) 衝突インターロック Functional MV(EPID) imaging (2 次元) c) 撮影中心と照射中心の一致(ガントリ 0 度と 90 または 270 度) ≦1 mm MVCBCT (3 次元) c) 撮影中心と照射中心の一致*1) ≦1 mm a) レーザーと XRETIC の一致 Monthly ≦1 mm レーザーと照射中心の一致 ≦1 mm b) EPID 停止位置(Vertical 方向) ≦5 mm h) 治療寝台移動精度/表示の確認 ≦1 mm e) FPD ゲインキャリブレーション (月 2 回) デッドピクセルマッピング (3 ヶ月~半年毎:メーカー作業) MV(EPID) imaging (2 次元) c) 照射中心と撮影中心の一致(4 方向) ≦1 mm MVCBCT (3 次元) e) 画質評価(均一性,低コントラスト分解能,空間分解能,アーチファクト) ベースライン*2) g) 位置照合解析ソフトウェアの精度(画像の歪み,スケール) ≦2 mm MV(EPID) imaging (2 次元) Annually e) 画質(空間分解能,コントラストノイズ比) ベースライン*2) c) ダレ補正テーブル取得 (半年毎) g) スケール板等撮影によるソフトウェア上での距離計測 ≦1 mm ソフトウェア上での相対移動量計測 ≦1 mm i) 総合的な電子情報転送確認*3) MVCBCT (3 次元) c) ジオメトリキャリブレーション (半年毎) g) 同一ファントム位置での画像再構成の再現性 ≦1 mm ソフトウェア上での相対移動量計測 ≦1 mm i) 総合的な電子情報転送確認*3) *1) Phantom はレーザーに合わせて設置する. *2) 受け入れ試験の結果,またはメーカー許容値を使用する *3) 治療計画 CT から位置照合までを含めた総合的な試験 (装置使用開始前やバージョンアップ時に実施)
![Fig. 4-2-18 Winston Lutz test (n=16),スターショット(n=10),MV CBCT 撮影中心(n=55)の分布 X: lateral,Y: longitudinal,Z: vertical [mm]](https://thumb-ap.123doks.com/thumbv2/123deta/5827643.542230/34.892.103.780.254.630/Fig218WinstontestスターショットnMV撮影中心n=55の分布XlateralYlongitudinalZvertical.webp)