Influence of
Influence of
Influence of
Influence of a
a
a
a Master Pattern Shape on Magnetic
Master Pattern Shape on Magnetic
Master Pattern Shape on Magnetic
Master Pattern Shape on Magnetic Printing Character
Printing Character
Printing Characteriiiisti
Printing Character
sti
sti
stics
cs
cs
cs
K. Tanabe, T. Saito, N. Sheeda, T. Komine, and R. Sugita Ibaraki University, 4-12-1 Nakanarusawa-cho, Hitachi, Ibaraki 316-8511, Japan
A master pattern with the a line-and-space (L/S) part and a checker part in the servo signals was made by using an FeCo film, and the edge printing characteristics of both parts were compared. The MFM output in the checker part was equal to the L/S part for a bit length of 200 nm, while for a bit length of 100 nm, the MFM output in the checker part decreased by about 30% compared with that in the L/S part, because of the MFM ’s low resolution. However, for a bit length of 100 nm, simulation results showed that the edge-printed magnetization of the checker part was equal to that of the L/S part. When the TMR head reproduced both parts, the output in the checker part was equal to that in the L/S part. The optimum printing field for the checker part was the same as that for the L/S part. Moreover, the rate of decrease in the MFM output did not depend on the printing field.
Key words: Key words: Key words:
Key words: magnetic printing, perpendicular magnetic recording media, servo signals
マスターパターン
マスターパターン
マスターパターン
マスターパターン形状
形状
形状が
形状
が
が
が磁気転写特性
磁気転写特性
磁気転写特性
磁気転写特性に
に及
に
に
及
及
及ぼす
ぼす
ぼす影響
ぼす
影響
影響
影響
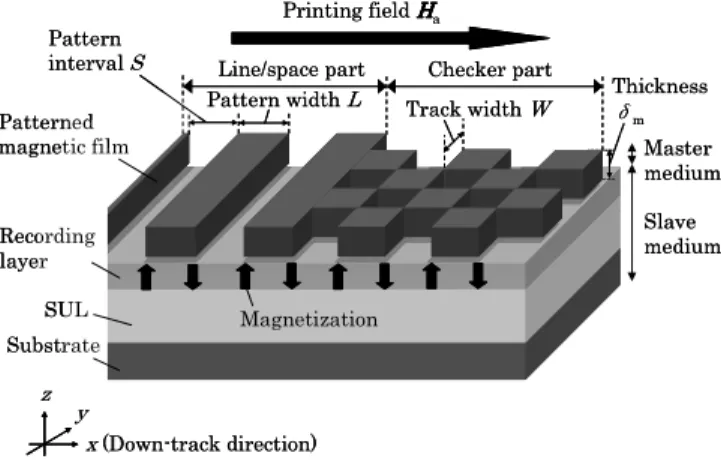
田辺和博・齋藤俊明・Nurul Sheeda・小峰啓史・杉田龍二 茨城大学工学部, 茨城県日立市中成沢町 4-12-1 (〒316-8511) 1. 1. 1. 1. はじめにはじめにはじめにはじめに 近年, ハードディスクドライブ(HDD)の高記録密化に伴い, サ ーボトラックライター記録によるサーボ書き込み時間の増大が問 題となっている. 磁気転写法は, HDD にサーボ信号を高速, 高精度 かつ安価に書き込む方法として注目されている1)~5). 磁気転写法にはビット転写(膜面垂直方向に転写磁場を印加)と, エッジ転写(膜面内方向に転写磁場を印加)の 2 通りの方法がある 4), 5). エッジ転写はビット転写よりも S/N が優れており, 将来の高 密度 HDD への適応が期待されている5). 我々はこれまで, サーボパターンにおける AGC(Automatic gain control)部を念頭におき, 磁性膜をライン状に形成したマスター媒体を用いて, エッジ転写 特性を実験的に評価してきた 6). しかし, バースト部におけるエッ ジ転写特性の実験的評価は十分に行われていない. 本研究では, AGC 部及び NULL バースト部の両方を含むマスター媒体を用い て, 両者のエッジ転写特性を実験的に検討した. 2. 2.2. 2. 実験方法実験方法実験方法実験方法 本研究では, サーボパターンにおける AGC 部及び NULL バー スト部を念頭に置き, FeCo膜をライン状(L/S状)及びチェッカー状 に形成したマスター媒体を用いて, 両者のエッジ転写特性を比較 した. 実験に用いたマスター媒体及びスレーブ媒体の模式図をFig. 1 に示す. マスター媒体は, 基板上に FeCo 膜(Co 30 at.%, 飽和磁 化Ms = 1900 emu/cm3, 保磁力Hc = 70 Oe, 透磁率μ= 100)をライ ン状及びチェッカー状に形成したもので, Fig. 1 に示すように両者
は隣接している. マスター媒体は,パターン幅L 及び隣接パター
ン間隔S の和が400 及び200 nm の2 種類を用いた. L及びS, チ ェッカー部のトラック幅W, 及び磁性膜厚δmを Table 1 に示す. スレーブ媒体として, CGC(Coupled Granular and Continuous) 構造を有する垂直磁気記録ハードディスクを用いた. 保磁力は 4.5 kOe である. なお, ハードディスク表面には保護膜及び潤滑膜が 形成されているため, 10 nm 程度の磁気的スペーシングが存在す る. 転写されたスレーブ媒体の磁化状態は, MFM(PNI 社製 Nano Si に Co 合金が被膜されている NanoWorld 社製 MFMR(Co 合金 膜厚 = 40 nm, 保磁力Hc = 300 Oe, 先端曲率半径 60 nm 以下)を 用いた. また, 探針-試料間距離は 10 nm とし, タッピングモード で測定した. Fig. 1 を用いてエッジ転写過程について説明する. AC 消磁状態 のスレーブ媒体にマスター媒体を密着させ, ダウントラック方向 (x方向)に転写磁場Haを4~12 kOe印加した. このとき, 転写磁場 により磁化したマスター磁性膜の作る磁場と, 転写磁場を重ね合 わせた記録磁場が記録層部分に発生する. マスター磁性膜両側エ ッジ近傍において生じる記録磁場の垂直成分によって, 記録層を 垂直上下方向に磁化させる. Fig. 1 Fig. 1Fig. 1
Fig. 1 Schematic diagram of master and slave media in the edge printing process. This master medium has both a line-and -space (L/S) part and a checker part.
Table 1 Table 1Table 1
Table 1 Dimensions of patterned magnetic film of masters. Part L [nm] S [nm] W [nm] δm [nm] L + S = 400 nm L/S 150 250 - 30 Checker 150 250 200 30 L + S = 200 nm L/S 100 100 - 30 x (Down-track direction) y z Printing field HHHHa Patterned magnetic film
Line/space part Checker part
SUL Substrate Master medium Slave medium Magnetization Track width W Pattern width L Pattern interval S Recording layer Thickness δm x (Down-track direction) y z Printing field HHHHa Patterned magnetic film
Line/space part Checker part
SUL Substrate Master medium Slave medium Magnetization Track width W Pattern width L Pattern interval S Recording layer Thickness δm
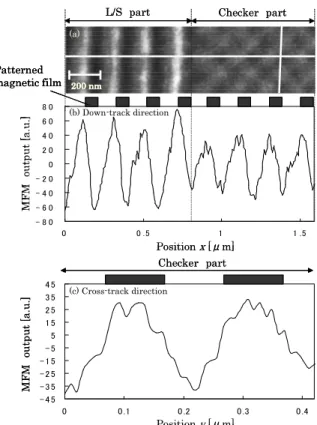
3. 3.3. 3. 実験結果実験結果実験結果実験結果 3.1 MFM 3.1 MFM 3.1 MFM 3.1 MFM 像及像及像及び像及びび MFMびMFMMFM 出力波形MFM出力波形出力波形出力波形 L + S = 400 及び 200 nm のときのライン部(L/S)及びチェッカ ー部における MFM 像及び MFM 出力波形を Fig. 2 及び Fig. 3 に 示す. 各図の MFM 出力波形は, MFM 像におけるダウントラック 方向(x方向)及びチェッカー部のクロストラック方向(y方向)に対 応する図中の白線部を抽出した. 転写磁場は 8 kOe である. Fig. 2(a), Fig. 3(a)に示すように, L + S = 400 及び 200 nm のと き, ライン部及びチェッカー部ともにマスターパターン形状を反 映し, ライン状及びチェッカー状の磁化状態となっている. また, Fig. 2(b), Fig. 3(b) から,ライン部及びチェッカー部におけるダウ ントラック方向(x方向)の MFM 出力波形は, L + S = 400 nm のと き単峰性波形, L + S = 200 nmのときはほぼ正弦波となり, ともに マスター磁性膜エッジ部で上向き及び下向きに磁化されているこ とがわかる. Fig. 2(c), Fig. 3(c)に示すように, チェッカー部におけ るy方向の MFM 出力波形はいずれもほぼ正弦波となり, マスタ ー磁性膜接触部及び非接触部の中央部でピークをもつことから, クロストラック方向においても垂直上下方向に磁化されているこ とがわかる. ここで, Fig. 2(b) に示すように, x方向におけるMFM 出力波形のp-p値をAp-pとし, チェッカー部とライン部を比較する と, L + S = 400 nmのとき, チェッカー部のAp-pはライン部と同等 であることがわかる. 一方, Fig.3(b)に示すように, L + S = 200 nm のときは, チェッカー部のAp-pはライン部に対して 30%程度減少 した. Fig. 2 Fig. 2 Fig. 2
Fig. 2 (a) MFM image in the L/S and checker parts of an edge -printed medium with L + S = 400 nm. (b) MFM output waveform in the down-track direction in the L/S and checker parts. (c) MFM output waveform in the cross-track direction in the checker part.
Fig. 3 Fig. 3 Fig. 3
Fig. 3 (a) MFM image in the L/S and checker parts of an edge -printed medium with L + S = 200 nm. (b) MFM output waveform in the down-track direction in the L/S and checker parts. (c) MFM output waveform in the cross-track direction in the checker part.
3.2 3.2 3.2 3.2 転写磁場依存性転写磁場依存性転写磁場依存性転写磁場依存性 L + S = 400 及び 200 nm のときの, ライン部及びチェッカー部 におけるAp-pの転写磁場依存性をFig. 4 に示す. Fig. 4 から, L + S = 400 及び200 nm のとき, チェッカー部のAp-pはライン部と同様 に転写磁場 8 kOe 付近で最大となり, ライン部と同様の傾向を示 すことがわかる. L + S = 200 nmのときの, ライン部に対するチェ ッカー部のAp-pの減少率をFig. 5 に示す. Fig. 5 からチェッカー部 Fig. 4 Fig. 4 Fig. 4
Fig. 4 Printing field dependence of the peak-to-peak value of the MFM output in the L/S and checker parts of edge printed media with (a) L + S = 400 nm and (b) L + S = 200 nm.
- 4 5 - 3 5 - 2 5 - 1 5 - 5 5 1 5 2 5 3 5 4 5 0 0 .1 0 .2 0 .3 0 .4 - 8 0 - 6 0 - 4 0 - 2 0 0 2 0 4 0 6 0 8 0 0 0 .5 1 1 .5 M F M out p ut [ a .u. ] Position x[μm]
L/S part Checker part
M F M out p ut [ a .u. ] Patterned magnetic film 200 nm 200 nm 200 nm 200 nm Checker part (a) (b) Down-track direction (c) Cross-track direction Position y[μm] - 4 5 - 3 5 - 2 5 - 1 5 - 5 5 1 5 2 5 3 5 4 5 0 0 .1 0 .2 0 .3 0 .4 - 8 0 - 6 0 - 4 0 - 2 0 0 2 0 4 0 6 0 8 0 0 0 .5 1 1 .5 M F M out p ut [ a .u. ] Position x[μm]
L/S part Checker part
M F M out p ut [ a .u. ] Patterned magnetic film Patterned magnetic film 200 nm 200 nm 200 nm 200 nm Checker part (a) (b) Down-track direction (c) Cross-track direction Position y[μm] - 7 0 - 5 0 - 3 0 - 1 0 1 0 3 0 5 0 7 0 9 0 0 0 .2 0 .4 0 .6 0 .8 MF M ou tp u t [a. u .] Position y[μm] Checker part
L/S part Checker part
(c) Cross-track direction - 8 0 - 6 0 - 4 0 - 2 0 0 2 0 4 0 6 0 8 0 1 0 0 1 2 0 0 1 2 3 MF M ou tp u t [a. u .] Position x[μm] Vp-p (b) Down-track direction Patterned magnetic film (a) 400 nm 400 nm 400 nm 400 nm - 7 0 - 5 0 - 3 0 - 1 0 1 0 3 0 5 0 7 0 9 0 0 0 .2 0 .4 0 .6 0 .8 MF M ou tp u t [a. u .] Position y[μm] Checker part
L/S part Checker part
(c) Cross-track direction - 8 0 - 6 0 - 4 0 - 2 0 0 2 0 4 0 6 0 8 0 1 0 0 1 2 0 0 1 2 3 MF M ou tp u t [a. u .] Position x[μm] Vp-p (b) Down-track direction Patterned magnetic film Patterned magnetic film (a) (a) 400 nm 400 nm 400 nm 400 nm Ap-p 0 20 40 60 80 100 120 140 160 0 2 4 6 8 10 12 14 0 20 40 60 80 100 120 140 160 180 0 2 4 6 8 10 12 14 Ap -p [a .u .] L/S part Checker part Ap -p [a .u .] Checker part L/S part
Printing field Ha[kOe]
Printing field Ha[kOe]
(a) L + S = 400 nm (b) L + S = 200 nm 0 20 40 60 80 100 120 140 160 0 2 4 6 8 10 12 14 0 20 40 60 80 100 120 140 160 0 2 4 6 8 10 12 14 0 20 40 60 80 100 120 140 160 180 0 2 4 6 8 10 12 14 0 20 40 60 80 100 120 140 160 180 0 2 4 6 8 10 12 14 Ap -p [a .u .] L/S part Checker part Ap -p [a .u .] Checker part L/S part Ap -p [a .u .] Checker part L/S part
Printing field Ha[kOe]
Printing field Ha[kOe]
Fig. 5 Fig. 5 Fig. 5
Fig. 5 Printing field dependence of the decrease rate, which is defined as the ratio of Ap-p in the checker part to Ap-p in the L/S
part(L + S = 200 nm). のライン部に対する MFM 出力の減少率は, 転写磁場に依存せず 一定であることがわかる. 4 44 4.... シミュレーションシミュレーションシミュレーションシミュレーションによるによるによる考察による考察考察 考察 4.1 4.1 4.1 4.1 計算方法計算方法計算方法 計算方法 L + S = 200 nm において, チェッカー部の MFM 出力がライン 部に対して 30%程度減少する原因を明らかにするために, シミュ レーションによる解析を行った. 計算モデルをFig. 6 に示す. まず, 転写磁場印加中におけるマスター媒体近傍の記録磁場分布を有限 要素法により求めた7). マスター磁性膜の飽和磁化を 1900 emu/cm3とし, ビット長L及びチェッカー部のトラック幅W を 100 nm, 磁性膜厚を 30 nm, マスター媒体とスレーブ媒体の磁気 的スペーシングは, 記録層上に存在する保護膜及び潤滑膜を考慮 し, 10 nm とした. 次に, 計算により得られた記録磁場分布を用い て, マイクロマグネッティックシミュレーションによりスレーブ 記録層の磁化分布を計算した. 記録層は CGC 構造であるとして, 飽和磁化Msを 600 emu/cm3, 膜厚を 20 nm(連続膜 5nm, グラニ ュラ膜 15 nm), 連続膜及びグラニュラ膜内の粒子間交換スティフ ネス定数A1及びA2をそれぞれ 0.7×10-6 , 0 erg/cm とし, 層間交 換スティフネス定数A3を 1.0×10-6 erg/cm とした. このときのス レーブ媒体は, 保磁力 4.5 kOe, 核生成磁場 2.5 kOe となり, 実験 で用いたスレーブ媒体の MH 曲線とほぼ一致した. さらに, MFM 出力と対応させるため, 得られたスレーブ媒体磁化からの漏れ磁 Fig. 6 Fig. 6 Fig. 6
Fig. 6 Calculation model.
場の垂直成分を計算した7). 漏れ磁場の垂直成分は, MFM プロー ブと媒体との距離 10 nm を想定して, スレーブ媒体表面の保護膜 +潤滑膜厚10 nm を考慮し, 記録層から20 nm 離れた位置を計算 した. 4 44 4....2222 計算結果計算結果計算結果計算結果 ライン部及びチェッカー部におけるダウントラック方向(x 方 向), 及びチェッカー部のクロストラック方向(y方向)における記録
磁場分布をFig. 7 に示す. 転写磁場は8 kOe である. Fig. 7(a)から,
ダウントラック方向における記録磁場の垂直成分Hzは, マスター 磁性膜エッジ部においてピークを持ち, 記録磁場の面内成分(x成 分とy成分のベクトル和)Hin-planeは, 磁性膜の接触部(L 部)で減 少し, 非接触部(S 部)で増加することがわかる. Fig. 7(b)から, チェ ッカー部のクロストラック方向における記録磁場の垂直成分Hzは, マスター磁性膜中央部でピークを持ち, L 部で増加し, S 部で減少 Fig. 7 Fig. 7 Fig. 7
Fig. 7 (a) Calculated recording field distributions in the down-track direction in the L/S and checker parts with L = 100 nm. (b) Calculated perpendicular component of the recording field Hz distributions in the cross-track direction in
the checker part.
Fig. 8 Fig. 8 Fig. 8
Fig. 8 Calculated magnetization distribution of patterned magnetic films in the checker part with L = 100 nm.
Printing field Ha[kOe]
D ec re a se r a te [% ] L=200 nm 0 10 20 30 40 50 0 2 4 6 8 10 12 14
Printing field Ha[kOe]
D ec re a se r a te [% ] L=200 nm 0 10 20 30 40 50 0 2 4 6 8 10 12 14 Positionx [nm] P os it io n y [n m ] 37° Positionx [nm] P os it io n y [n m ] 37° 37° 37° Checker part 100 200 300 Positionx [nm] 0 L/S part -6 -4 -2 0 2 4 6 8 10 12 0 100 200 300 Positionx [nm] R ec or d in g fi el d [k Oe ] Hz Hin-plane ΔHz Patterned magnetic film (a) (a) 0 50 100 150 200 250 300 350 400 -4 -3 -2 -1 0 1 2 3 4 Hz [k O e] Positiony [nm] (b) Checker part Checker part 100 200 300 Positionx [nm] Checker part 100 200 300 Positionx [nm] 0 L/S part -6 -4 -2 0 2 4 6 8 10 12 0 100 200 300 Positionx [nm] R ec or d in g fi el d [k Oe ] Hz Hin-plane ΔHz Patterned magnetic film (a) (a) 0 L/S part -6 -4 -2 0 2 4 6 8 10 12 -6 -4 -2 0 2 4 6 8 10 12 0 100 200 300 Positionx [nm] R ec or d in g fi el d [k Oe ] Hz Hin-plane ΔHz Patterned magnetic film (a) (a) 0 50 100 150 200 250 300 350 400 -4 -3 -2 -1 0 1 2 3 4 Hz [k O e] Positiony [nm] (b) 0 50 100 150 200 250 300 350 400 -4 -3 -2 -1 0 1 2 3 4 Hz [k O e] Positiony [nm] 0 50 100 150 200 250 300 350 400 -4 -3 -2 -1 0 1 2 3 4 0 50 100 150 200 250 300 350 400 0 50 100 150 200 250 300 350 400 -4 -3 -2 -1 0 1 2 3 4 Hz [k O e] Positiony [nm] (b) Checker part 10 nm 20 nm 100 nm 30 nm Recording layer Master medium Slave medium Patterned magnetic film x (Downtrack -direction) y z Substrate 5 nm Continuous layer Granular layer A1 A2 A3 10 nm 20 nm 100 nm 30 nm Recording layer Master medium Slave medium Patterned magnetic film x (Downtrack -direction) y z Substrate 5 nm Continuous layer Granular layer A1 A2 A3 5 nm Continuous layer Granular layer A1 A2 A3
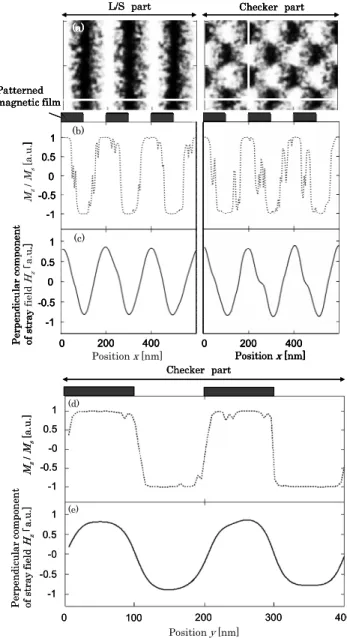
することがわかる. ここで Fig. 7(a)のダウントラック方向の記録 磁場分布におけるHzの0-p 値をΔHzとし, ライン部とチェッカー 部のΔHzを比較すると, チェッカー部はライン部に対して 30%程 度減少していることがわかる. 次に, 転写磁場印加中のチェッカー 部におけるマスター磁性膜内磁化分布をFig. 8に示す. Fig. 8から, 隣接パターン接触部において, 磁性膜内磁化がダウントラック方 向から最大 37°程度傾いていることがわかる. これにより, ダウ ントラック方向におけるマスター磁性膜端面に生じる磁荷が減少 し, ΔHzも減少するものと推定される. 次に, ライン部及びチェッカー部におけるダウントラック方向, 及びチェッカー部のクロストラック方向における記録層の磁化分 布Mz/Ms,及びスレーブからの漏れ磁場の垂直成分Hz分布を Fig. 9 に示す. Fig.9 (b)~(e)は, Fig. 9 (a)の磁化分布(上面図)中における,
Fig. 9 Fig. 9 Fig. 9
Fig. 9 (a) Calculated magnetization distribution (plan view), (b) magnetization distribution and (c) perpendicular component of the stray field Hz in the down-track direction in L/S and checker
parts from an edge-printed medium with L = 100 nm. (d) Calculated magnetization distribution and (e) perpendicular component of the stray field Hz in the cross-track direction in
checker part. ダウントラック方向(x方向), 及びチェッカー部の, クロストラッ ク方向(y方向)に対応する白線部の磁化分布及びHz分布である. Fig. 9 (a)から, ライン部及びチェッカー部は, 実験結果と同様にマ スターパターンを反映した磁化状態になっていることがわかる. Fig. 9(b)から, ライン部及びチェッカー部における磁化分布 Mz/Msは矩形波状となり, マスター磁性膜エッジ部において, 磁化 が上向き及び下向きに飽和していることがわかる. ここで, Fig. 9(b)のダウントラック方向の磁化分布Mz/Msにおいて, ライン部 及びチェッカー部における磁化遷移領域に着目すると, チェッカ ー部はライン部よりも磁化分布が乱れていることがわかる. これ は, Fig. 7(a)の記録磁場分布に示すように, マスター磁性膜エッジ 部近傍における記録磁場の垂直成分Hzの勾配が, チェッカー部は ライン部よりも小さいため, 磁化反転にばらつきが生じたためと 推定される. Fig. 9(d)から, チェッカー部のクロストラック方向に おける磁化分布は, ダウントラック方向と同様に矩形波状であり, L部及びS部において, 垂直上下方向に磁化されていることがわか る. 一方, Fig.9(c), (e)から, ライン部及びチェッカー部におけるダ ウントラック方向及びクロストラック方向のHz分布は, いずれも 矩形波状から正弦波に近付いている. 以上から, 実験結果 Fig. 3(b), (c)が示すように, ライン部及びチェッカー部における, ダウント ラック方向及びクロストラック方向の MFM 出力波形がともに正 弦波となったのは, スレーブ媒体と MFM プローブとのスペーシ ングの影響によるものと考えられる. ここで, Fig. 9(c)において, ライン部とチェッカー部におけるHz のp-p 値を比較すると, チェ ッカー部のHzは, ライン部と同等であることがわかる. Saito ら は 以 前 , ス レ ー ブ 媒 体 に お け る 磁 化 反 転 が Stoner-Wohlfarth モデルに従うと仮定し, 記録磁場の面内成分及 び垂直成分のベクトル和Heff, 及び膜面垂直方向と磁場の成す角φ を求めることで, エッジ転写における面内磁場の影響を定量的に 検討した8). ここでも同様に, Fig. 7(a)の記録磁場分布において, ラ イン部及びチェッカー部におけるマスター磁性膜エッジ部のHeff 及びφを求めると, Stoner-Wohlfarth モデルから, 磁化反転に十分 な磁場強度が得られていることが確認できた. したがって, Fig. 7(a)に示すように, チェッカー部におけるΔHzがライン部に対し て約 30%減少しているが, マスター磁性膜エッジ部の強い面内磁 場成分Hin-planeが磁化反転を促すため, Fig. 9(c)に示されるように, 転写されたスレーブ媒体において, チェッカー部の漏れ磁場の垂 直成分Hzがライン部と同等になったと考えられる. しかし, Fig. 9(c)のHz分布は, 実験結果である Fig. 3(b)の MFM 出力と一致し ない. 以上から, チェッカー部における MFM 出力の減少は, 転写 磁化によるものではなく, MFM 測定による影響であると推定され る. 4.3 MFM 4.3 MFM4.3 MFM 4.3 MFM プローブプローブプローブプローブ及及及及びびびび TMRTMRTMRTMR ヘッドヘッドによるヘッドヘッドによるによる再生による再生再生出力再生出力の出力出力ののの推定推定推定推定 以前の研究から, MFM 出力がスレーブ媒体からの漏れ磁場の 垂直成分Hzに比例することが明らかになっている7). また, TMR ヘッド出力もHzに比例することが知られている. そこで, MFM測 定による影響を考慮するために, Fig. 9(c)のHz分布において, 実験 で用いた MFM プローブ及び実際に用いられる TMR ヘッドの形 状及び大きさに相当する領域で, Hzを平均化することで, 簡易的
L/S part Checker part
(a) (a) (a) (a) 200 400 0 Positionx [nm] Patterned magnetic film Positionx [nm] Mz / Ms [a .u .] P er p en d ic u la r co m p on en t of s tr a y f ie ld H z 「a .u .] 200 400 -1 -0.5 0 0.5 1 -1 -0.5 0 0.5 1 0 (b) (c)
L/S part Checker part
(a) (a) (a) (a)
L/S part Checker partChecker part
(a) (a) (a) (a) 200 400 0 Positionx [nm] Patterned magnetic film Positionx [nm] Mz / Ms [a .u .] P er p en d ic u la r co m p on en t of s tr a y f ie ld H z 「a .u .] 200 400 -1 -0.5 0 0.5 1 -1 -0.5 0 0.5 1 0 (b) (c) 200 400 0 Position200 x [nm]400 0 Positionx [nm] Patterned magnetic film Positionx [nm] Mz / Ms [a .u .] P er p en d ic u la r co m p on en t of s tr a y f ie ld H z 「a .u .] 200 400 -1 -0.5 0 0.5 1 -1 -0.5 0 0.5 1 0 (b) (c) Patterned magnetic film Positionx [nm] Mz / Ms [a .u .] P er p en d ic u la r co m p on en t of s tr a y f ie ld H z 「a .u .] 200 400 -1 -0.5 0 0.5 1 -1 -0.5 0 0.5 1 0 (b) (c) Positiony [nm] Mz / Ms [a .u .] (e) (d) P erp en d icu la r co m p on en t of s tra y f ie ld H z 「a .u .] 100 300 400 -1 -0.5 -0 0.5 1 -1 -0.5 -0 0.5 1 0 Checker part 200 Positiony [nm] Mz / Ms [a .u .] (e) (d) P erp en d icu la r co m p on en t of s tra y f ie ld H z 「a .u .] 100 300 400 -1 -0.5 -0 0.5 1 -1 -0.5 -0 0.5 1 0 Checker part Checker part 200
に両者の再生出力を見積もった. MFM プローブの先端曲率半径を 55 nm とし, TMR ヘッドのフリー層膜厚を 5 nm, トラック幅を 55 nm と仮定した. なお, TMR ヘッドの浮上量は, MFM プローブ と同様にスレーブ媒体表面から 10 nm とした. MFM プローブ及 び TMR ヘッドによる再生出力の計算結果を Fig. 10 に示す. Fig. 10 に示すように, チェッカー部において, MFM プローブによる再 生出力はライン部に対して 30%程度減少し, Fig. 3(b)の実験結果 と一致した. しかし, チェッカー部の TMR ヘッド出力は, ライン 部と同等である. これは, MFM プローブの場合, クロストラック 方向だけでなく, ダウントラック方向における隣接磁化の干渉も 受けるためと考えられる. 以上から, ビット長が 100 nm 程度と短 い場合であっても, チェッカー部における転写磁化は, ライン部と 同等であり, MFM プローブよりも再生分解能が高い TMR ヘッド で再生する場合, チェッカー部はライン部と同等の再生出力が得 られると推察される. ここで, 参考として, MFM プローブの先端曲率半径rを変えた ときの, ライン部及びチェッカー部における MFM 出力の p-p 値 Ap-pを Fig.11 に示す. Fig. 11 から, 曲率半径が 30 nm 程度以下で あれば, ライン部及びチェッカー部のAp-pはほぼ同等となるが, 曲 率半径が増加すると, チェッカー部はライン部よりも MFM 出力 が大きく減少することがわかる. これは, 再生時において, 曲率半 径の増加に伴い, チェッカー部はダウントラック方向だけでなく, クロストラック方向の符号間干渉も起こるためと考えられる. なお, L + S = 400 nm(L = 150 nm, S = 250 nm)に対する計算も 行ったが, MFM 出力波形及びライン部及びチェッカー部の出力の 相対値ともに, Fig. 2(b)に示される実験結果と同様の結果が得られ た. このことは, 本研究のシミュレーションの妥当性を示すものと 言える. Fig. 1 Fig. 1Fig. 1
Fig. 1111 Dependence of MFM output on pole tip radius of MFM 1 probe in the L/S and checker parts.
5. 5. 5. 5. まとめまとめまとめ まとめ サーボパターンにおけるAGC 部及びNULL バースト部を念頭 に置き, FeCo 膜をライン状及びチェッカー状に形成したマスター 媒体を用いて, 両者のエッジ転写特性を比較した. その結果, 次の ことが明らかになった. (1) 転写されたスレーブ媒体からの再生波形に, ライン部及びチ ェッカー部間の相違はなく, ビット長 100 nm 程度以下であ れば, いずれのパターンにおいても正弦波となる. (2) ライン部及びチェッカー部における転写特性の転写磁場依存 性は, ほぼ同様の傾向を示し, 両者の最適転写磁場(最も優れ た転写特性が得られる転写磁場)も, ほぼ同じ値である. (3) ビット長が 100 nm 程度と短い場合であっても, チェッカー 部における転写磁化は, ライン部と同等であり, TMR ヘッド 再生の際には, 両パターンにおける再生出力の差は生じない ことが推定される. 謝辞 謝辞謝辞 謝辞 本研究の一部は, 日本学術振興会科学研究費補助金基盤研 究(B) No.21360159 の支援により行われました. また, 富士フイル ム(株)の皆様にご協力, ご議論を頂き, 東陽テクニカ(株)様には 測定方法に関してご指導を頂きました. ここに深謝致します. References ReferencesReferences References
1) R. Sugita, T. Kinoshita, O. Saito, T. Muranoi, M. Nishikawa, and M. Nagao: IEEE Trans. Magn., 36363636, 2285 (2000). 2) R. Sugita, O. Saito, T. Muranoi, M. Nishikawa, and M. Nagao:
J. Appl. Phys., 91919191, 8694 (2002).
3) A. Saito, T. Hamada, T. Ishida, Y. Takano, and E. Yonezawa: IEEE Trans. Magn., 38383838, 2195 (2002).
4) A. Saito, T. Ono, and S. Takenoiri: IEEE Trans. Magn., 39393939, 2234 (2003).
5) M. Nishikawa, S. Wakamatsu, K. Ichikawa, T. Usa, M. Nagao, T. Ishioka, T. Yasunaga, T. Komine, and R. Sugita: IEEE Trans. Magn., 424242, 2612 (2006). 42
6) N. Sheeda, S. Okami, Y. Sakaguchi, T. Komine and R. Sugita: J. Magn. Soc. Jpn., 333333, 159 (2009). 33
7) K. Tanabe, S. Okami, T. Saito, T. Komine, and R. Sugita: J. Magn. Soc. Jpn., 33333333, 185 (2009).
8) T. Saito, Y. Sakaguchi, S. Okami, T. Komine, and R. Sugita: J. Magn. Soc. Jpn., 33333333, 68 (2009). 0 0.2 0.4 0.6 0.8 1 0 20 40 60 80 Ap -p [a .u .]
Pole tip radius of MFM probe r [nm] Checker part L/S part 0 0.2 0.4 0.6 0.8 1 0 20 40 60 80 Ap -p [a .u .]
Pole tip radius of MFM probe r [nm] Checker part
L/S part
Fig. 10 Fig. 10Fig. 10
Fig. 10 Calculated MFM output and TMR head output waveforms in L/S and checker parts from an edge-printed medium with L = 100 nm. Checker part TMR head output TMR h ea d o u tp u t [a .u .] 0 200 400 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 -1 Positionx [nm] Patterned
magnetic film L/S part
MF M ou tp u t [a .u .] -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 0 200 400 Positionx [nm] MFM output Checker part TMR head output TMR h ea d o u tp u t [a .u .] 0 200 400 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 -1 Positionx [nm] Checker part TMR head output TMR h ea d o u tp u t [a .u .] 0 200 400 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 -1 Positionx [nm] Patterned
magnetic film L/S part
MF M ou tp u t [a .u .] -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 0 200 400 Positionx [nm] MFM output Patterned
magnetic film L/S part
MF M ou tp u t [a .u .] -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 0 200 400 Positionx [nm] MFM output 2002002002009999年年年年1010月1010月月月141414日受14日受日受日受理理,理理,,,201020102010年2010年年2年2月22月月月24242424日採録日採録日採録日採録