The fapanese JouTnal of Psychonomic SCiettce
2003
,
VoL 22、
No.
1,
94−
101圃
視覚
のボ ト
ム ア ップ
信号 処
理
奥行
運
動
の知 覚
か ら
の考察
塩 入
諭
千 葉 大 学
Bottom
−up
processing
of
visual
information
−
Aview
from
motion
in
depth
perception
一
Satoshi
SHIolRI
c
励 α翫iversity
*The first major task of vision is to extract useful information
frem
the retinal signals obtained from the environment through the eye optics (bottom up signals ).
I attempt to classify the typesof processing
in
thefirst
stage of the visualinforInation
processinginto
four categories ;informa−
tiQn reductiQn
,
information
extractiQnfor
particular functions,
parallel processing,
and comple・
mentary processing
.
Based on the classification.
theprocess
of motionin
depth
perception
is
considered as a typical visual processing that contains all of the four types of proces$
ing,
Thissuggests that therc are a
limited
number ofbasic
strategiesto
processbottom
up signal jnthe
visual systern
.
Key
words :human
vision,
bottom
up signals,
visuai pathways,
parallel processing,
motionin
depth,
stereo,
motion1
.
は じ め に 我々 は,
外の世 界か ら得ら れ る信 号に基づ き感 覚 器お よ び脳の処理 を 通 して,
自身を取り巻く 環境にっ い て適 切な 理解を して い る.
その 過程は,
外の 世界につ い て の モ デル を頭の 巾に構 築す る作 業で あ り,
知 覚と は その結 果であると捉 えることがで きる.
視 覚にっ い てい え ば,
日の前に広が る 環境に対して網 膜 上に得ら れた像から外 界の モ デルを作ることで あ る.
こ こ でい うモ デル は実物 に対 する推 定で あり近 似で あ る.
2
次兀 の網 膜 像か ら3
次 元の 世界 を 構 築 する必 要があ り,
完 全に再 現 する ため に必要な情報が得ら れ ない ことを考え る と推定が必要で ある し,
完全 に再 現す る た めに必要な情 報を得ら れ な い,
ま た得られた情 報すべ てを使う とは限ら ない こと か ら近 似である といえ る.
本 稿で は,
外 界 を 表 現 する モ デ ル を得る た めに視 覚 系が行う網 膜情報の処理につ いて,
* Department of Information and Image
Sciences,
Chiba University
,
1−
33 Yayoi・
cho,
Inage−
ku,
Chiba
263−8522
e
−
mai1 :shioiri@faculty
.
chiba−
u.
jp
基 本 的な方 略が あ る とすれ ばど ん な もの であるかにっ い て考察したい
,
処理 過程を考え て も機能を考え ても視 覚 処理は多岐にわ たる こと か ら,
こ こで 般 的な法則の よ うな ものを考え る ことに意 味が あるかは疑 問も感じる.
そ れを考え る人 間の思 考 過 程の反 映で しか ないかも しれ ない,
し か し な が ら,
その よ う な 疑 問 はこ こで の試みを 取 りやめ る理 由には な ら ないで あ ろ う.
視 覚の よ う な複 雑なシス テ ムにつ い て の研 究を する場 合に は何ら かの枠 組み を持っ こと は有効で あ ろ う.
こ こ で は,
視 覚 特 性と 物理 量の対応を明確化す ること か ら明らか に な る点を中 心に,
外 界を表 現 するモ デル構 築の た めの 視覚 処理の基 本 的な方略にっ いて考 えて み ることにする.
2
.
視覚 入力 視 覚へ の入 力は,
い うまで もなく左 右 眼の網 膜 像で あ り,
視 覚 処理 は網 膜 像か ら始ま る とい うことに異 論はな い で あ ろ う.
た だ し, 実際に は その網膜 像を得るた め に 眼球 や 頭や体の動き が あ る わ けで あり,
網 膜像か らすべ て が始ま る とい い きる ことは妥 当とは いえ ない.
こ こ で は,
視 覚 神 経 系の処 理 を 行 動 と切り離 して考え,
網 膜 像か ら光受容体が信号を取 り入れる過 程か ら話を始める こ とにする
.
網 膜 像は光の分布で ある の で,
2次 元の座 慓 の波 長ごと の光の強 度と な る.
そこに時問変 化を加え る と3次 元の座 標の 関 数 と な り,
さ らに 2っ の網 膜が あ る.
し た がっ
て,
1(κ,
y,
t,
V,
λ}で網 膜 情 報すべ てを表 現 で きる (Adelson & Bergen,
1991).
こ こ で,
x,
y は空 間 位 置, tは時 間, V は左右網膜のいずれ か, λ は光の波長 を示す.
こ の表現で は,5
っ の変数で網 膜にあ る情 報が 表せる こと を 意味 するが,
こ れ は決し て少な い情 報 量で ある ことを意 味しな い、
空 間 位 置につ いていえ ば,600
万 以 上の 錐 体 と1
億 以 上の 杆 体がそ れ ぞ れ異な る入 力 を 受 け と ることにな る.
時 間にっ い て は,
例え ば 1秒 間 に 10 コ マ の静[ヒ画 像の処 理 を した として も1時 間で3
万6千コ マ に な る.
そ こ に 3種 類の錐 体の 区 別と左 右網 膜 像の 次元 が加わ るこ とにな る.
1 時間の 間に視 覚系が 取り扱う情 報は,1G
の13
乗の数にお よ ぶ信 号とにな る.
1時 間の問に得られた網 膜 情 報を正 確に表 現し た け れば,
10 の 13乗 次 元の空 間の中の座標とし て あ ら わす 必妛 が あ るこ と に な る.
こ こ で時 問に関する部分は,
まっ
たく不 適 切な考え方で あ る か もし れ ないが,
静 止し た網 膜 像にっ い て の みを考えて もそ の次 元の高さ は変わ ら な い.
っ ま り1億 次 元 を超え る直感 的に言っ て これ は 我々 の視覚が直接 的に扱っ ている情報量で は な い.
ボ ト ム ア ッ プ信 号の 処理 に は,
少なくと も情 報の低 減が行わ れて い る であろ うし,
お そ らくは そ れ 以上の処理 が行わ れて いる,
以 ドで は,
情 報の低 減に加えて機 能 分 化 的 処 理,
相 補的 処 理,
並 列 処 理 にっ いて考え るこ とにす る.
これ ら は完 全に別 個の 処理 と はいえ ない が,
少なくとも 異なる側 面を持ち,
ボトム ア ッ プ信 号の処 理 過 程の特 徴 を考え る上で意 味のある分 類と考え ら れ る.
3. 視
覚情報
の分 離 抽 出 視 覚のポ トムア ッ プ信 号の処 理は,
基 本 的に は網 膜 像 にある情 報か ら何 らかの意 味で有 効な情 報 を分 離,
あ る いは 抽 出 す る 過 程で あ る といえ る,
有 効 な 情報と は 何で あ る か は問題で あ る が,
こ こ で は実 際に行わ れて い ると みなせ る事 柄を材 料に考え る ことにする.
3.
1 視 覚 情 報の低 減1
億次元 を超え る 入力 情 報は,
眼球か ら出 力さ れ る時 点で100
万 次 元 程 度 まで低減 さ れて い る.
視 神 経の数,
つ まり神 経 節 細 胞の軸 索の数は 100 万 本 程 度で ある か らで ある.
この情 報 低 減は解 像 度の低 ドともい え るが,
その よ うに単純に捉え るこ と はで き ない,
も し そ うであ る な ら ば, 光受容 体の レ ベ ル で1
億以上の数が必 要であ るとは思 え ない,
神 経 節 細 胞の重 要な特 徴の 1っ は そ のFigurc 1
.
Two circled arcas havc thc samcluminance but ↓he area in
the
shadowapPeared to be lighter
.
受容野が中心周辺拮 抗型で あ るこ とであ る.
これによっ
て,
光 受 容 体の応答 値が変 化す る部 分で顕 著に大き な応 答をする こ と に な る.
っ ま り神 経 節 細 胞レ ベ ルの処理で は局所的なコ ン トラス トの検 出あ るいはエ ッ ジ抽 川的な 処理 を しな が ら,
空 間的解像度の低減を行って い る よ う にみ える,
局 所 的なコ ン ト ラ ス ト検 出は,
明る さの対 比 に関 わり,
照 明 光や影に よ る反 射 光の変 化を取り除いて 面の 反射を知 覚す る ために も有 効で あ り う る,
Figure l は市松 模様の〔「い マ ス の反射光が影によっ て黒いマ ス の 反 射 光とほぼ同じになる状 況を示 す.
こ のと き我々 は黒 いマ スを黒く,
白いマ スを白く知覚 する.
もし,
影の部 分と その外 側の明る さの 絶 対 値 を 直 接 比 較で き ればこ の2
っ の マ ス は[司じ明 度に感 じ ら れ る は ずで あ る が,
そ う は ならない (Adelson,
1993),
局 所 的なコ ン ト ラス トの 処 理は,
こ の よ うな広い範 囲で の明 度よ りも近 傍の領 域 の相対 的な明る さ を重点的に処理 す るこ とを意味す る.
Figure
1
の例は, そのよ う な 処 理 が世界を 適切に捉え る ことに貢献する こと を示 唆 する.
時 間 方 向の変 化にっいても 同様に局 所 的 なコ ン トラス ト処理の議 論が ・∫能であ る.
網 膜で の神 経 系は,
光 量の 時 間変 化 を取り 出 す よ う な 処 理 も して い る.
時 間周波 数 特 性 が8Hz 付 近に感 度の最 大を持っ こと か ら,
視 覚 系 は お よ そ 8 フ レー
ム/秒 程 度の 処理 を して い る と い え る か も し れ ない.
空 聞解像度と同様に時間 的な局 所コ ン ト ラス トの検 出を し な が ら情 報 低 減を行っ て い る と み な す こと もで き る.
た だ し,
錐 体の 時 間 特 性と神 経 節 細 胞の 時 間 特 性の問の差は,
そ の数の羌に比べ れ ば 小さく,
空 間 解 像 度の 場 合ほ どの影 響は考え に くい.
3.
2
機 能 分 化 的処理 前 節で は入 力情 報の 部 を抽 出 する処 理が情 報 低 減を96
基 礎 心 理 学 研 究 第 22 巻 第 1 号意味することを述べ た
.
し か し,
人力か らの情 報の 抽 出は 必 ず し も情 報量 の低減 を伴わ ない
.
その典型的な例は
,
色 覚である.
色 覚は 3種 類の錐 体の反 応か ら始 まるた め
,
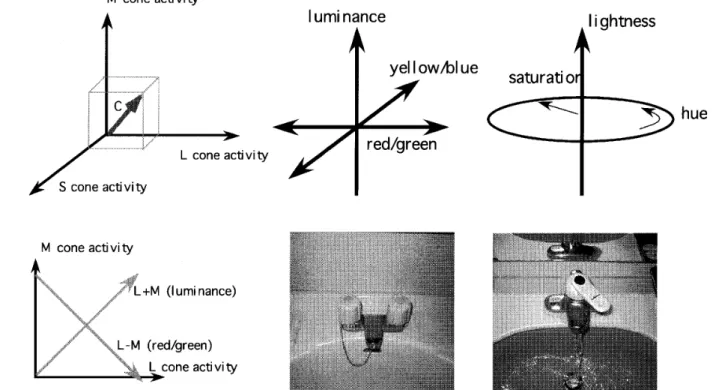
そ の入力は 3次元で あ る 〔Figure 2 top left),
方
,
色に対す る知 覚は色相,
彩 度,
明度の3
属 性で表現口∫能で あり
,
や はり3
次 元であ る (Figure
2
top right ).
さ らに そ の中 間 過 程に は赤 緑
,
青 黄の反 対 色と輝 度の 3次 元での表 現が存 在す る〔
Figure
2
top center >,
つ ま り色 覚 過 程は
,
入 力か ら最終結果まで基本 的に 3次 元で あ る.
そこ には情 報 低 減の要 素は ない.
こ の ような3次 元 から3次 元へ の変 化に はどんな 意 味 が あるの であろう か.
錐 休か ら反 対 色 過 程へ の変 換にっ いては,
興 味深い 点が指摘さ れて いる (Palmer,1999
).
今,
L 錐 体,
M 錐 体の み につ い て考え る と,
錐 体か ら L−
M (L 錐 体と M 錐 体の応 答の差 をと る)で表 現さ れ る よ う な赤 /緑 反 対 色 過 程へ の変 換は,
給 湯シ ス テ ムと 対応づ けて考え ること がで き る.
水と お湯の混合によっ
て湯 温を制 御 するシ ス テム において,
水とお 湯の 混 合と い う こ と を直 接 的に実 現 する と,
2っ の ノブに よ りそれ ぞ れの 水量 を制御す る もの が考え ら れ る 〔Figure
2
bot−
tom center ).
し か し体 験 的に も,
こ の方 法が使いや すい とは い え な い こ と がわか る,
もっ と使いやすい もの に,
上 下 左 右に動くノ ブに よっ て水量 と水とお湯の混合比 を独 立に制御す る もの が あ る(
Figure
2bott
【)m right).
適当な湯温に設定し た ま まその 量 を変える こと がで き大変
使い易い
.
2つ の ノブに よる方 法は L,
M の錐 体の 出力を2次 元で表 現 することに
,.
h
下 左 右に動くノブに よる方 法は 輝 度と反 対 色 過 程 を2次 元で表 現 す ることに対 応 す る(
Figure
2bottom
left).
質 的な 違い (色)と 量的な違い (光 強 度 )を別々の軸で表 現 する とい う意 味で有 効であ ろ う
,
光受容体は, 波長に依存し た感度 特性を持っ て いるこ と を考える と,
原理的に単一
の種類の錐 体や桿体で は波 長の変 化と強 度の変 化は区 別で きない (1変 数の法 則),
これは受 光 とい う現 象の 物 理 的制 約 といえ る,
我々は,
3
種 類の錐体を持ち,
その 出力を適当に変換す るこ と で,
強 度の次 元と色 相の次 元を う まく分離 して取 り扱う ことに成 功し て い る.
もと もと網 膜に あ る情 報を適 切な 形で抽 出して い る典 型 例 といえよ う,
3.
3
相 補 的処理 情 報の抽 出とい う点で も う 1つ 別な観 点が ある.
視 覚 系が対 応で きる網 膜 像の明る さの範 囲 を 考え ると,
瞳 孔 径に よ る光 量の 調 整 を 考 慮して も 10の7
乗 を 超え る と 推定さ れ る.
そ れに対応 す る た めに, 我々 の網 膜には感 度の異なる錐 休と桿 体とい う2種 類の 光 受 容 体が存 在 する,
桿 体は,
光 量子数 個 レ ベ ル の非 常に暗い網 膜 像に も反応で きる が明るい環境で は働かず, 錐体は桿 体の 働 く暗い環 境での網 膜 像には感 度を持た ないが,
太 陽 光 下 Mcone activity / C Lcone activityluminance
I
ueScone acti vity
hue
Mcone activi
ty
(
lum
}nance )dlgreen)
cone activity
Figure 2
,
Transformation of color spacefrom
cone spaceto
the
spacefor
final
color perception(top
倉
〉距
。。 ⊆ Φ のSpatial
resolution
Figure 3
.
Covered areas by cones androds
in
Sensitivity
/Resolution diagram.
の視 環 境で の非 常に明るい網 膜 像に まで対応で き る
.
おそ らく錐 休と桿体は感 度の差に起因して
,
両 者の間に は空 間解像度な どに も大き な差がある
.
例えば,
空間解像度を 比較す る と
,
錐 体の働 く明所 視で は60cyc
/deg
程 度で ある の に対し桿 体の働く暗 所 視で は 10cyc /deg 以 下に な る(vanNes,
Koenderink,
Nas,
&Bouman,
1967),
こ の 空問視の解像 度の差 は
,
高い感 度で 低 解 像 度の 情 報 を抽 出 する処 理と低い感 度で高 解 像 度の情報を抽 出 する 処理の 2っ で,
視 環 境の広い光強 度変化に対 応して い る こ とを意 味す る.
錐体の密 度 が高い ことに加え て,
明 所 視で瞳 孔径が小さい ことや ス タ イ ル ズ クロ フ ォー
ド効 果 (瞳 孔の 巾 心か らの光 線に高い感 度を 持っ 効果で,
結 像 にお ける迷 光の影響を低減す る)な ど は,
眼 球 光 学 系の 収 差や迷 光の影 響を取り除い て高い解 像 度の処 理に貢献 して い る (口本 視覚学 会 編,
2000).
それに対して暗所 視では 瞳孔 径が大きく,
桿 体にス タ イル ズ クロ フ ォー
ド 効 果が ほ と ん ど ない.
これら よ り,
桿 体系が高い感 度で 網 膜 像 を 処理 す ることに貢 献して い る.
以.
E
よ り,2
つ の処理 は相補 的な役 割を果たして い るといえ る.
Figure
3 は,
この 2っ の処理系を概 念的に示 してい る.
も ちろ ん実 際に は,
様々な選 択 肢が あ り う る.
単独の メ カニ ズ ムで広い光 強 度に高い解像度で対応 する こ と がで き れ ば そ れ は 最善か も し れ ない し,
3っ以上の メ カニ ズムが 適 当に関 与する ことも可 能で あ ろ う.
Figure
3
か ら読み取 る ことが で きる の は,
我々の視 覚 系 は高感度で高解 像 度 の処理 を あ き らめ, 広い 光強 度と明る い環 境での高 感 度 を実 現 して いることである.
同 様の二 重性は,
初 期 視 覚の 2っ の経路,
大 細 胞 経 路 と小 細 胞 経 路にも見ら れ る.
この2
つ の経路は外 側 膝 状 体の細 胞の 分 類に基づ き,
網 膜 神 経 節 細 胞か ら大 脳 視 覚 〉 。 ⊆ Φ ⊃ σ Φと
一
匹
o
Ω∈
Φ トSpatial
frequency
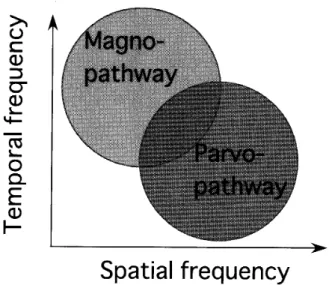
Figure
4.
Senstivity
of parvo−
and magno−
pathways
in
the spatiotemporal frequen−
cy
domain .
野の各 領 野で処 理にわた り
,
並 列 的な処理 過程で あ る と考え られて い る (Livingstone &Hube ユ
,
1988;Merigan & Maunsell,
1993),
両者の独立性につ い て は疑 問 も多 いが,
外 側膝状体の レベ ル では分 離 した処 理であり,
時 間特性,
空間 特 性,
波 長 選 択 性な どで顕 苦 な 差 が あ る時 空間 周 波 数 特 性につ い て は,
お お ま かに以 下の よ うにま と め るこ とがで きる.
大 細胞 経路の処理で は時 問 的に は 高 周 波まで感度を持っ の に対 して,
空 間 的に は低周波に 感 度を持っ.
逆に小 細 胞 経 路の処理 で は空 間的に は高周 波まで感 度を持っ の に対して,
時間 的に は低 周 波に感 度 を持っ.
Figure4
に時 空 間 周 波 数 領 域で の感 度の概 略 を 示 す.
両者の感度は対 角 線E
に位 置し,
高い空 間 解 像 度 を得るた めに時 間 解 像 度 を,
高い時間 解像度 を得る た め に空 間 解 像 度 を 犠牲に して い る よ うにみ え る,
相 補 的 な 機 能 を 持っ2
っ の メ カニ ズ ムで で きるだけ 広い時 空 間 周波数の 刺 激に対応 して い る意味で,
錐 体と桿 体の場合 〔Figure
3)と よ く似た関係が見て取れ る.
3.
4 並 列 処理 大 脳 視 覚野で の 処理に対 する作 業 仮 説として,
色,
輝 度,
両眼視 差,
運 動な ど を独 立な経 路で処 理して いる と い う もの が ある.
こ の考え は,
た とえ ば等 輝 度の色 差 刺 激に対 する運 動 印 象,
両眼立体視によ る奥 行,
毛観 的 輪 郭 な ど が 非 常に弱ま る とい っ た現 象に よっ て ある程 度 支 持さ れ る.
こ の仮 説は単 純 す ぎる であろ う が,
情報 抽 出 にお け る 重要な側 面を表 して いる,
今,
網 膜上の情 報か ら運 動 方 向と色 度を取 り出す こと を考え る.
運動 方 向,
色 度 をそ れ ぞ れ10
点で代 表さ せ た と して も,
両 者の組 み合わ せ は 100 と なる.
各 網 膜 位 置につ い て100
の組 み合わ せの う ちの ど れ か を割り振るこ とに な る.
し か98 基 礎 心 理 学 研 究 第22 巻 第
1
号愚
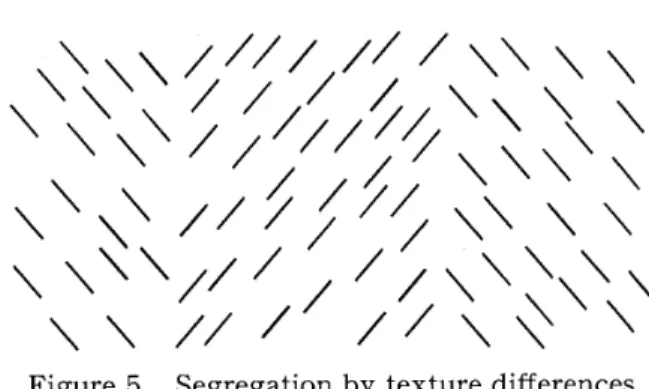
Figure 5.
Segregation総
1〕y texture differences、
し
,
も し運動方向と色 度が独 立に処理 さ れて い る と す れ ば,
各 位 置で は 10方 向の ど れ か と 10色 度の ど れ か を 割 り振れ ば よい ことになり取り扱う値は20
で済む.
も ちろ ん こ の場 合は,
ある色が特 定の連動方 向に運動して い る場合と別の色が同じ方 向に運 動して い る場 合を 運動 の処理過 程で は区 別で き ない とい う問 題はある.
しか し,
視 覚 系に とっ
て は それ ぞ れの位 置で の色と運 動 方 向 が わ か ればそ れで十 分かもしれない.
考 慮 する刺 激 属 性 の数が増え る と組み合わせ は指 数 関 数 的に増 加 するの で,
並列 処理にお け る情 報低 減の効 果は指 数 関 数 的に大 き くなる.
並 列 処 理の 役 割 は,
網 膜 情 報に混 在す る異な る情 報を 分 離す るこ とで も あ る.
ヒ記の色 覚に お い て輝 度と色 度 を分 離 し た よ うに,
そ れ ぞ れの刺 激属性を分 離 するこ と は機能的に も 重 要で あ る,
た と え ば,
異な るテ クス チャー
間の境界を検 出するこ とを 考えてみる.
Figure 5 か ら線 分の傾き が 異 な る領域 間の分 割は,
視 覚に とっ て 容 易で あるこ と が わ か る.
し か し網 膜 像に, テ クス チャー
の境 界に対 応 する線はない.
こ の境 界線は,
明示 的に示さ れて はいない とい う意 味で は錯 視 的で もある.
し か し,
そ れ は網 膜 像にその情 報が ない こ とを意 味 する わ けで は な い.
テ ク ス チ ャー
の 境 界を検出す るこ と は,
適 当な画像処理 に よっ て (っ ま り ボ トム ァ ッ プ的処 理の みで)可能であ る(Landy
&Bergen,
1991>.
こ の処理過 程で は,
テ クス チ ャー
の要 素であ る各線 分の検出が 必要 で あ る が,
最 終 的な テクス チ ャー
境 界に は線 分その もの 形状は関与し ない.
別の 言い方をする と網 膜 像にあ る各 線 分は,
その 線 分の 形状の情報と テ クスチ ャー
領 域の形 状の両 方を含んで い て,
視 覚 処理 は そ れ らを分離 抽 出し て い る とい うこ と である,
そ れ に よ り面の属性と み な せ るテクスチャー
を 構 成 する要 素の形 状 と,
面の端に対 応 するとみな せる テ クス チャー
の 輪 郭は並 列 的に処 理され て い る とい え る,
4
. 奥行
運 動の処理 前 節で は,
視 覚にお け るボ トム ア ップ信号の処理過 程 の 特 徴にっ い て の考 察で あっ た.
本稿で は情報低 減,
機 能分化的処理1 相捕 的処理,
並 列 処理は,
視 覚の ボ トム ア ッ プ信 号処 理の基本的な特徴で あ ると提 案 したい.
し か し,
そ の一
般 性につ いて は十 分な根拠 が あ る わ けでは ない,
こ こ で は,
奥行 運 動 知 覚の例を とり,
そこに これ らの特 徴が見られるこ とを 示 したい.
奥 行 運 動 知 覚は静 的な奥行知覚の メ カニ ズム と独 立な 処 理 過 程がある と考え ら れて い る〔Regan,1991
;Regan ,
Beverley,
& Cynader,
1979).
原理的に は静的な奥行手 掛りの時間 変 化 を捉え るこ とが で きれ ば,
奥行 運 動は知 覚で きる はずで あるが,
実 際に確 認さ れて い るもの は それほ ど多 くない 〔Shioiri
,
Morinaga,
&Yaguchi,
2002b
},
本 稿で は
,
比 較 的よ く理 解 されて い る両 眼 性 手 掛 りの処理 過程につ い て考 察 す る
,
両眼性の奥 行 運 動 手 掛り と して は
,
両 眼 視 差の時 間変 化と両眼間 速 度 差の 2つが あ る〔CuInming & Parker
,
1994;Shioiri
,
Saisho,
&Ya −
guchi,
2000 ).
前 者は,
奥 行 手 掛りである視 差が時 間と と もに変化す ること か ら奥行運 動 手掛りとな ることであ り,
当 然といえる,
後者は奥行方 向に運動 する対 象で は 左 右眼の網 膜 像の運 動 速 度が異なるた め,
その速 度差 が 奥行運動の 手 掛 りにな る とい う もの で ある.
観 察 者に まっ す ぐ向かっ
て く る物 体の網 膜像は,
右眼で見ると左 方 向に,
左 眼で見る と右方向に運動す るこ と に な る し, 遠ざ か る場 合は逆に な る.
したがっ て左右 眼の速度差か ら対 象の奥行運動の方向が わか る ことに な る.
手 掛り が 存 在 すること と,
視 覚 系が そ れ を実 際に利用することは 別の問 題であるが,
近 年 両 手 掛 りと も利 用さ れて い るこ とを 示 す 実 験 事 実 が 蓄 積 さ れて い る 〔Brooks,2001
;Brooks &
Mather,
2000
;Brooks,
2002a;Brooks,
2002b
;Shioiri
et al.
,
2002b ;Shioiri
,
Nakajima,
& Yaguchi,
2001;Shioiri et al.
,
2000 ).
而 眼 視差の時 間変化を利用 す る ため に は ま ず両眼視 差 を検 出し,
そ の時 間 変 化を求 め るメカニ ズム が 必要で あ り,
両眼間 速 度 差 を 利 用 する Motl 1n depth小
Te叫 x)raldcrLvattve春
DiSlvaritY detect1[m Motion ln depth个
V擘1 ty difference卒
rnotiendetection
春
mot 旧ntiffteeti[}n
奩
驪
奩
驪
di・凶 しy d 宮e i醐 me (B )血tErmmlar veL。city d正fferen
・
es Figure 6.
Two mechanisms for seeing motion
in
depth
:disparity
changein
time
(A
)andた めには ま ず各 網 膜 像で速 度を検 出 し
,
その 差 を 求め る メ カニ ズム が必 要で あ る (Figure 6).
4.
1 情 報 低 減 情報の低減 とい う観点で は,
奥 行や運 動に対して は,
実 際に網 膜 像か ら再 現で きる もの よ りも少な い情 報のみ を扱っ て い る こ とは明 らかである.
たとえば立体視 力の 奥 行 変 調の空 間 周 波 数へ の 依 存 性 を 見 る と,
最 大の感度 が0.
5cyc
/deg
程 度の帯 域 通 過 型で あり,
それよ りも高 周 波で も低 周 波で も 感 度が低 ドする (Shioiri et aL,
2002b >,
理由は ともか く,
網 膜 像に含ま れ る両 眼視差情 報の.
一
・
部のみを使っ ている と い え よ う.
運 動 視にっ い て も同様であ り,
た と え ば速 度が 正弦 波 状に変 化 する刺 激 において その 速 度 変 化の検 出 感 度は や は り0.
5cyc
/deg
付 近の 周 波 数の 刺 激で 最 大に なる と報 告さ れて い る{
Golomb ,
Andersen,
Nakayama ,
MacLeod,
& Wong,
1985
>.
奥 行 運 動につい て は,
時 間 特 性におい て特に重 要な点 が あ る,
奥 行運動におい て も, 水平運動におい て も対 象 の運 動は網膜像の 移動と な る.
網 膜 像で比較 する と,
眼 前 1m で O.
5 kmfh (〜
0.
15m /s)の水 平 速 度の運動物 体と 10km /h の奥 行 方 向の運 動 物 体が同 程 度の網 膜 像 の移 動 を もた らす,
奥 行 運 動と して は非 常に高速である が, 水平方向で は 目常 的なもので あ る,
おそ ら く,
奥 行 運動処理に必 要な網 膜 像の速 度の ヒ限は,
2次 元 運 動の もの に比べ てずっ と遅い もの で 十 分であ ろ う.
実際,
奥 行 運 動の時 間 解 像 度は2
次元 運動の もの よ り も ずっ と 低い こ とが知ら れて る.
当 然と もい えるが,
網 膜 像か ら 検 出口」能で あっ
て も実 際に はあ り え ない不 必要な情報は 処理 されない,
4.
2 機 能分 化的処 理 前 述の よ う に, 奥 行運動 検出の た めに は視 差 変 化 検 出 と速度差変化検出の2
っ の メカニ ズムがある と考 え ら れる.
両 者とも奥 行 運 動の検出 をして いる と す る と, そ の役 割にっ いての疑問が生じ る、
全 く同じ機 能を持つ な らば一
方だ けで十 分か も し れ ない し,
ある い は一
方が補 助的な役 割のみ を果たす 可能 性 もある,
視 差 変 化に基づく奥 行 運 動の検 出 と速 度 差に基づ く奥 行 運 動の検 出の 間には機 能 的な差が あ るのであろ う か.
両 者の処理 過程の特徴か ら次の こ と が明 ら かで ある (Figure
7>,
速度差の場 合は,
3次 元で の運 動 方 向 を知る こと がで きるが,
対 象の 3次 元 位 置は決定で き ない.
視 差 変 化の場 合は,
対 象の3
次 元 位 置 を 知ること がで き る が 運動 方向 を決定 す ること はで き ない.
こ の ことは両 者 が異な る機 能を持っ
て い る か,
少なくとも持 ち うるこ と を 意味 して い る,
実 際に,
単 眼の運 動 残 効が奥 行 運動のPotion information can be D⊥1eo しlon infmrmatio
]
1 Ltnn b自
cvded in Lh巳
dlsparl匸y dctec−
(oded in the 、eloci しy detec−
tion mechan15 皿 tio[〕tneohHtils皿
.
Figure
7.
The
disparity
nlechanism codes the position with discriminating directions Qnly
between
forward
andbackward.
The velocity mechanism cQdes the direGtion inthe 3D space without position information
.
方 向に影 響する と の報 告もあ る (Brooks
,
2002b ;Shio−
iri,
Kakehi ,& Yaguchi,
2002a ).
し た が一
・
て速度 差によ る奥 行 運 動 知 覚が3
次 元の運動 方 向の知 覚をもた ら し てい ることは確かで あろ う,
ただし,
こ の機 能の分離に っ いて は注 意 も必 要である.
3
次 元の運動 方 向は視差変 化 と2次 元の運 動 情 報 を 組み合わ せ るこ とで可能と な る し, 運動 対 象の3
次 元 位 置は,
速 度 差 于掛 りと静 止 立 体 手掛り との紅み合わ せ か ら知る こと が可 能で あるか ら で ある.
4.
3
相 補 的 処理 錐体と桿体や大細胞 経 路と小 細 胞 経 路の場 合の よ う に,
ある機 能に対して 2つ の メ カニ ズムを持っ ときに両 者は異なる感 度 特 性 を 示 すことを 述べ た.
我々の研 究 室 で は,
奥 行運動に 関 わ る2
つ の メカニ ズム につ い て も同 じよ うに相 補的であ るこ と を示 すい くっ かの実 験 的 な 証 拠を得て い る 〔Shioiri et aL 2002b :懸 樋 大 介・
塩 入 諭・
矢口博 久,
2001;中 島知彦・
弓削公一 ・
塩 入 諭 ・ 矢口博 久,
2003),
1
っ は,
時空 間周波 数特性にっ いての 実験で ある.
我々 はそれ ぞ れの手掛り を分 離した 2条 件 を設 定し,
刺 激の時 間 周 波 数と空 間 視の周 波 数 を 変 数と して,
奥 行 運 動に対 するコ ン トラ ス ト感 度を 測定し た.
実 験 結果に基づ きそれぞ れの 条 件の 感 度の概 略を Fig・
ure8
に示す.
顕著な違いは時 間 周 波 数 特 性であ り,
速 度差于掛り条 件で は 1Hz 付 近に感 度の最 大を持っ 帯 域 通 過 型の特 性を示 すの に対して視 差手掛り条 件で は低 域 通 過 型で あ る,
運動視が時間変化を捉え ることに始ま る こと を 考 え る と 納得で き る結 果であ る.
視差条件で は,
よ り遅い処理 によっ て時 間 変 化が捉え られてい る が,
視 差の検 出が一
般 的に時 間が か か るもの との認 識と一
致す る.
空 間 特 性につ いて は, そ れ ほ ど明 確な 差 が得 ら れて はいない,
視差手掛り条 件で は低 周 波 通 過 型の特 性を示 し,
速度差条 件で は ゆ る やかな感 度の最 大を持っ 帯 域 通100
基 礎 心 理 学 研 究 第22巻 第1
号 牌匳
》 呂 」 σ毳
一
丹 Q α EO ド Spatial frequency Figure 8.
む E コ ワΦ
」
一
一
巴 ◎ ユ ∈ トSpatlal freq凵ency あ
り
⊆ O コσ
」
←
一
帽」
9 露 EO ト 卸ati訓frequencyShematic view of spatiotemporal fre
−
quency characteristics of contrast sensitivityto see motion
in
depth.
Velocity
condition(left)
,
disparity cQndition (center >and com−
parison between the two (right>.
過 型に特性を示し た
.
速 度に対 する感度の 変化にっ いての実 験か ら も,
速 度 差によ る奥 行 運 動 知 覚と視 差によ るもの と が異な る時 間 特性 を 持っ こ とが支 持さ れる.
こ こ で もそれぞれの手 掛 りを分 離し た2
条件を設 定し, 刺激 速 度を変 化して奥 行 運 動の検 出 能 力を測定し た.
網 膜ヒでの速 度が33min
/ s(1秒 当た り視 角で 33分 移 動 )か ら 133min /s まで変 化し た と き, 速 度 差 手 掛りのみの刺 激では運 動 方 向の 弁 別 課 題に対す る正 答率が や や ヒ昇し たのに対して,
視 差 手 掛り条 件で は大 き く低 下 し た.
これ は, 時 間 周波 数に 対 する感 度か らの 予 測と 致 する.
これ らの実 験の示 唆 す る ところ は,
速 度差 に基づ く奥 行 運 動メ カニ ズ ム は高 速の運 動に,
視差に基づ く奥行運動メ カニ ズムは低速の 運 動に感 度を持っ という相 補 的な役 割を持っ とい うこと であ る,
4.
4
並 列 処 理 2っ の 奥行 運 動メ カニ ズム の 存 在は,
奥 行運動とい う 同 じ処 理 を並 列 的 な異なる過 程で行っ
てい るこ と を意味 す る.
こ の2
っ の処 理の存 在は,
上 述の複 数の刺 激 属 性 を並 列 処理する場 合と同 様な情 報 低減の効 果が ある で あ ろ うか.
そ の答え はFigure 7 か ら明ら かで あ ろ う.
も し,
単 独の過 程で 奥 行 運 動の方 向とそ の位 置を処理 す る 場合を考え る と, そ れ ぞ れの位 置で そ れぞ れの方 向 を 知 る こと が必 要にな り,
「位 置×方 向」の組み合わせを 処 理 する ことになる.
しか し,
方 向の処 理 と位置の処 理 を 分 離す るこ と は 「位 置+方 向 」だけの数を扱え ば よい こと にな る.
っ ま り,
機 能 分 化で 考え た方 向と位 置が並 列 的 に処 理されて い て,
その結 果 情 報の 低減 が口∫能と な るこ とになる.
5
.
おわり に 本 稿で は,
視 覚 処理にお けるボトム ア ッ プ信 号の処 理 に か か わ る基 本 的な方 略にっ い て検 討し,
い くっ かの 枠 組み を提案し た.
これ ら につ いての賛 否は ともかく,
物 理量との対応 を考えて視覚特性を比 較 検 討 することで,
処 理 過 程の特 徴が捉え やす くな ること は示せ た と 思 う.
こ の よ う な 形で の視覚 特 性の検 討は,
環境の与え る情 報 と関 連づ けることで よ り重要な意味を持つ は ずで あ る.
E
述の奥 行 運 動の現 実 的な速度と2 次元の 運 動の現 実 的な速 度の比 較は そ の一
例であるが,
日常生活で得ら れ る網膜 像の 中に含ま れ る情 報 を 視 覚 特 性 と比 較で きる形 で検 討する こ とで よ り詳 細な研 究が口∫能で あ る.
今 後 は,
発 展 する情 報 処理技 術を積 極 的に活 用す るこ と か ら,
さらに重 要 な成 果に結 びっ くこ と が期 待さ れ る.
参 考 文 献Adelson
,
E.
H.
1993 Perceptual organization and the
judg
皿 ent of brightness.
Science,
262,
2042−
2044.
Adelson,
E.
H.
& Bergen,
J.
R.
1991 The plenoptic
function
and the elements of eraly vision.
In:
Landy ,
M,
S.
&Movshon,
J,
A.
(Eds.
),
Computationalmodets of visoral
processing
,
Cambridge
:MIT
Press.
Brooks,
K,
2001Stereomotion
speed perceptionis
contrast dependent
.
Perception,
30,
725−
731,
Brooks
,
K.
& Mather,
G,
2000 Perceived speed ofmotion in
depth
is reduced in the periphery.
Viston
1
〜esearch,40,
3507−
3516.
Brooks
,
K .
R .2002a
Interecular
velocity differencecontributes to stereo 皿otion speed perception
.
ノ
41
〕α η θsθ τ/ision
,2,
218−231.
Brooks
,
K.
R.
2002b Monocular motion adaptation affectsthe
perceived trajectory of stereomotion.
ノ
burnat
ofExperimentaZ
Psychology lluman PerceP−
tion and
Performance,
28,
1470−
1482,
Cumming
,
B.
G .
&Parker,
A.
J,
1994 Binocularmechanisms
for
detecting
motion−in−depth.
Vision
Research
,
34,
483−
495.
Golomb
,
B.
,
Andersen,
R.
A.
,
Nakayarna,
K .
,
MacLeod ,
D ,1.
,
&Wong ,
A ,
1985 Visual thresholdsfor
shear−
ing
motionin
monkey and man.
Vision Research,
25,813−820.
懸樋大介
・
塩 入 諭・
矢11博 久2001
奥 行 き運 動 知 覚における両 眼 間速度差処理 メカニ ズムの特性
.
Visioa
l3
,
206−
220.
Landy
,
M,
S.
& Bergen,
J.
R.
1991 Texture segrega−
tion
and orientation gradicnt.
Vision Research,31,
679−691.
Livingstone
,
M .
& Hubel,
D.
1988 Segregation of
form,
color,
move 皿 ent,
anddepth
: anatomy,
physi−
ology,
and perceptiQn.
Science
,240,
740−749.
Merigan,
W.
H.
& Maunsell,
J.
H.
1993How
parallel are the primate visual pathways ?Annu .
Rev.
Neurosci.
,16,369−
402.
中島知彦・
弓削公一。
塩 入 諭・
矢口博 久 2003 奥 行 き運動知 覚にお け る2っ の手が か り とそ の差 違.
映 像 情 報メ デ ィ ア学会 技術報告,27
,21−24.
日本 視 覚 学 会 編2000
視 覚 情 報 処理ハ ン ド ブ ッ ク.
東 京,
朝 倉 書 店.
Palmer, E.S. 1999
Vision
Seience:
Photons
tophe-nomenolog),.
Cambridge:
MIT
Press.
Regan, D,
1991
Depth
from
rnotion andmotion-in-depth.
In:
Regan, D,(Ed.)
Binocular vision, 9,pp.
137-160.
London: MacMillan.Regan,
D. Beverley, K.&
Cynader,
M.
1979
The
visual perception of motion in depth.
Scientijic
American, 241, 136-151.
Shioiri,
S.
Kakehi,
D.
&
Yaguchi,
H,
2002a Motion indepth
perception based on monocular motionaftereffect. Second Asian Conference on Vlsion,p,
10.
Gyeongju:
Korea.Shioiri,
S.Merinaga,A.
&
Yaguchi,
H.
2002b
Depth
perception of moving objects. In:
Javidi,
B,
&
Okano. F.
(Eds.),
3D
television,video and display technology,Berlin:
Springer-Verlag,
Shioiri,
S.,
Nakajima,
A. & YaguchL H. 2001Contri-bution
of color to motion indepth. FirstAsianConjbvance
on Vision,p.56. Hayama:Japan,
ShioirL
S.,Saisho,
H.
&
YaguchL
H.
<2000
Motion
in
depth based on inter-ocularvelocity
differences.
Vision
Research,
40,
2565-2572.
van
Nes,
F.
L.
Koendcrink,
J,
J.
Na$,
H.&
Bouman,M,
A.
1967
Spatiotemporal
modulation transferinthe