足関節の可動域の制限が跳躍時の下肢関節の
動作に及ぼす影響
Effects of restricted ankle joint mobility
on lower extremities joint motions during a stop-jump task
09M55049 夏 雷 Xia Lei
指導教員:丸山剛生 准教授
審査員:石井源信 教授,須田和裕 准教授
本研究の目的は,足関節の可動域と下肢関節の動作との関係性を検討するため,跳躍時に足関節の可 動域を制限した状態が膝,股関節の角度,下肢関節のモーメントおよび仕事量に及ぼす影響を明らかに することである.それにより,足関節の可動域の制限が跳躍時の下肢関節の動作に及ぼす影響に関して 更なる知見を得ることとした. 被験者は、バスケットボール熟練者 10 名の若年健常男性であり、足関節の可動域を制限するために傷 害予防によく使われる足首サポーター及びハイカットバスケットボールシューズを使用し、ローカット (L)、ローカット+足首サポーター(L+S)、ハイカット(H)、ハイカット+足首サポーター(H+S)の4条件で、 ストップジャンプを全力で行わせた. 下肢三関節について、助走速度と跳躍高から運動のパフォーマンスを評価した.また,立位時の足関 節の可動域,跳躍動作中の関節角度,関節角速度,関節角加速度,関節間力,関節モーメント,関節パ ワー,関節仕事量,サポートモーメント及び接地中の力積,重心の変位を算出した.統計処理は4条件間 で対応のあり分散分析を行った.なお,有意水準は 5%と設定した. 足関節の可動域を制限することで,助走速度と跳躍高に違いが認められなかったがサポーターを着用 する方には跳躍高が小さい傾向があった(p=0.052).標本数を増やしてさらに検討すれば有意差が認めら れる可能性があると考えられる. 立位時の足関節の可動域と跳躍時の足関節の角度について,全ての条件間で有意差が認められ,足関 節の可動域が靴の種類及び足首サポーターによって制限されたことが明らかであると考えられる.膝, 股関節の角度は足関節の可動域の制限の影響を受けなかったと考えられる. 本研究の足関節の可動域の制限程度では各関節の関節間力及び関節モーメントに影響は及ぼさなかっ た.ポジティブな関節パワーには有意差が確認された.跳躍動作中の屈曲動作におけるネガティブな仕 事量には有意差がなく,伸展動作におけるポジティブな仕事量には有意差があった.跳躍高とは別に試 技中の重心の変位を計算したところ条件間で有意差が認められた.条件間の違いはポジティブな仕事量 と重心の変位は一致しており,重心の変位の増加がポジティブな仕事量を増加させたことが考えられる. 足首サポーターを着用することにより関節の可動域が制限され,その結果,重心の変位を抑制しながら 跳躍できることが示唆された. 足首サポーターによる可動域の制限は,骨間力及びモーメント等の傷害リスクには影響を及ぼさない が,重心の変位を有意に減尐させ,ポジティブな仕事量を有意に減尐させることが分かった.Effects of
restricted ankle joint mobility
on lower extremities joint motions during a stop-jump task
The purposes of this study were to examine the effect of restricted ankle joint mobility on lower extremities joint motions during a stop-jump task, and to clarify the relationship between the angle of ankle joint and the angle of knee and hip joints. By this study, it can get further knowledge regarding the effect of restricted ankle joint mobility during a stop-jump.
Ten healthy male subjects performed maximally stop-jump in 4 conditions (low cut basketball shoes: L, low cut basketball shoes and ankle supporter: L+S, high cut basketball shoes: H, high cut basketball shoes and ankle supporter: H+S). The body was regarded as 4 link segments model (head-trunk, thigh, leg, foot). Jump height and approach speed were measured. Angle, angular velocity, angular acceleration, joint force, moment, power and work in each joint were computed by inverse dynamics model.
One-Way Repeated-Measures ANOVA was used to compare among 4 conditions, using the Bonferroni test as a post-hoc test. The significance level was set at 0.05.
Jump height and approach speed were defined as exercise performance. There was no difference in performance among 4 conditions.
It was showed that the range of motion of ankle joint was different among 4 conditions. It was considered that range of motion of ankle joint was influenced by different types of shoes and ankle supporter. The angles of knee and hip joints were unaffected by the restriction of range of motion of ankle joint. There were significant differences in angular velocity of ankle joint between conditions of L vs. L+S, L vs. H+S, L+S vs. H and H vs. H+S, and angular acceleration of ankle joint between conditions of L vs. L+S, L vs. H+S, L+S vs. H and H vs. H+S.
It was also found that the no differences in joint force and joint moment among 4 conditions. It was suggested that the significant differences of ankle and hip joints power between conditions depend on the effect of joint angular velocity rather than joint moment. Positive joint work in extension motion of jumping and displacement of COM were decreased by using supporter. One the other hand, there was no difference in negative joint work in flexion motion of jumping.
1. 緒言 バレーボール,バスケットボール,スキー などのスポーツには着地動作が頻繁に行わ れ,下肢の運動制御や傷害が課題である.着 地動作は大きな衝撃力を伴うために下肢損 傷を被るリスクが高いと言われている,膝関 節における損傷が多く報告されている.膝関 節は着地時の大きな床反力に対して,安定し た姿勢を維持したり,衝撃を吸収するために 屈曲動作を行う.膝関節以外でも,股関節と 足関節が着地動作中に屈曲動作を通して全 体の衝撃吸収にも貢献している(1) .先行研 究では着地動作中の下肢三関節(足関節,膝 関節,股関節)の運動学を調べられ,下肢三 関節は着地時の衝撃吸収のため、異なる屈曲 動作を行う.また、膝関節屈曲角度がより大 きいと衝撃吸収が大きくなる.そして、 McNitt-Gray(2) ,Zhang(1)らが普通の着地動 作中では足関節の可動域が最も小さいこと から,伸張性仕事も最も小さいことを述べて いる.まだ,足関節は着地中に最初の衝撃体 として作用するが,足関節の可動域が限られ ていることと小さい筋肉構造により衝撃の 減衰能力が小さいことが推測されている.従 って,足関節の可動域をさらに制限すること により着地時の衝撃吸収が抑制されること が予測され,その結果,膝関節および股関節 への衝撃力が増加し,それに対抗するための 動作変化が生じることも考えられる. Yeow CH(3)らが下肢の協調パターンにつ いて,膝関節の屈曲角度は股関節の屈曲角と 関数的な相関関係があり,足関節の背屈角度 は自然対数関数的な相関関係があることを 報告している.着地中の下肢関節の角度の関 係が明確され,足関節の動作は膝、股関節の 動作に影響することが明らかになったが,傷 害予防のために下肢三関節の角度だけを調 べるのは不十分であり,跳躍時の下肢関節の 動作等の運動力学的な要素に焦点をおいて 研究を行う必要があると思われる. 一方,スポーツシューズに求められる性能 は傷害予防やパフォーマンスの向上である. たとえば,バスケットボールを行う時にバス ケットボールシューズを履くことにより着 地時の足首の傷害予防やストップした後の 動作がうまく行うことができる.近年,バス ケットボールシューズのデザインがだんだ んハイカットからローカットに変更する趨 勢があり,ハイカットバスケットボールシュ ーズのように足関節を拘束する状態を嫌う 傾向がある.しかし,足関節の拘束の程度あ るいは有無によりパフォーマンスが向上す るのか,あるいは,傷害予防の観点から有益 であるか否かはまだ明らかではない.そこで, 足首の可動域が下肢の運動学的な,運動力学 的な要素との関連性について検討すること は,フットウェアのデザインの違いが生体に 与える影響をより詳細に調べる上で大きな 意味を持つと考えられる.また,幅広い要素 の検討により,より有効な傷害予防のフット ウェアの開発に貢献できるものと思われる. 本研究の目的は,足関節の可動域と下肢関 節の動作との関係性を検討するため,跳躍時 に足関節の可動域を制限した状態が膝,股関 節の角度,下肢関節のモーメントおよび仕事 量に及ぼす影響を明らかにすることである. 仮説は,着地時における膝,股関節の角度, 角速度が足関節の可動域と関連すること,足 関節の可動域の制限により下肢関節のモー メント,パワー,仕事,関節間力に差が生じ ることのふたつである. 2. 方法 2.1 実験条件と実験試技 若年健常男性バスケットボール熟練者 10 名(年齢:25.6±3.0 歳,身長:174.3±7.4cm, 体重:73±11.2kg)が実験に参加した.本実 験では,足関節の可動域を制限するために傷 害予防によく使われる足首サポーター(米国 マクダビッド社製 ハードサポート #101 ア ンクルガード)及びハイカットのバスケット ボ ー ル シ ュ ー ズ ( 日 本 ア シ ッ ク ス 社 製 #TBF982 ハイカットバスケットボールシュ ーズ)を使用した.ローカット(日本アシッ クス社製 #TBF992 ローカットバスケット ボールシューズ)(条件:L と定義),ローカ ット+足首サポーター(条件:L+S と定義), ハイカット(条件:H と定義),ハイカット+
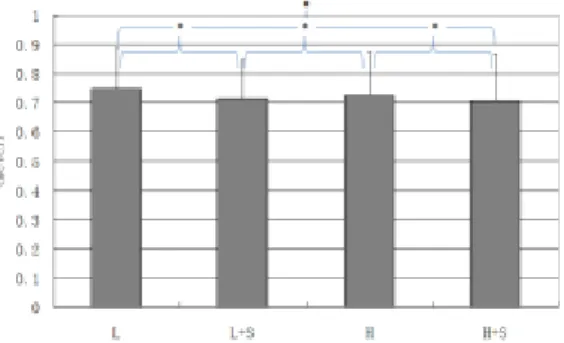
足首サポーター(条件:H+S と定義)の4条 件を着用し,各被験者は最大努力下で,各条 件を各3回ずつ計12試技のストップジャ ンプ(最大5ステップでできるだけ早く走っ て,左右の足を一枚ずつのフォースプレート に着地し,その後,できるだけ真上に高く跳 ぶ試技)を行った. 2.2 測定項目 2.2.1 三次元座標データ 被験者の全身の体節基準点 27 箇所に反射 マーカを取り付けた.撮影は MAC 3D system Eagle (Motion analysis 社製)10 台を用いて, サンプリング周波数 250Hz で行った. 2.2.2 床反力データ フォースプレート2台(Kistler 社製,600 mmX 900 mm) を用いて,踏切動作中の床 反力をサンプリング周波数 1kHz で測定し た.座標系の定義は三次元座標データと一致 させた. 2.2.3 立位時の足関節の可動域 跳躍実験前に,角度計を用いて,体重をか けた状態で背屈,底屈動作をさせて最大背屈, 底屈角度を測定した. 2.2.4 官能評価 足関節の拘束感,動き易さ,跳びやすさを 絶対判断法で調査した. 2.3 分析対象区間 慣用肢の床反力鉛直成分が各被験者の静 止状態の3 %以上増加した時を動作開始点 (Motion Start :MS) と定義した.一方, 動作の終了点である離地(Take off:TO)に 関しては,慣用肢の床反力鉛直成分が静止状 態の3 %以下となった時と定義した.そして, MS からTO までを解析区間とした.なお, 解析区間は被験者間,実験試技間での比較を 行うためにMS からTO の区間を100 %に 正規化をした. 2.4 算出項目 2.4.1 運動パフォーマンス 助走速度と跳躍高を用いて運動パフォー マンスを評価した.助走速度は着地する瞬間 前の 10 コマの座標の変位で算出した. 動作中大転子の Z 軸座標の最大値と静止 状態の大転子の Z 軸座標の最大値の差より 跳躍高を求めた. 2.4.2 運学的変数 先行研究(1)の定義に従って,関節角度を算 出した.そして,関節角度を数値微分するこ とで関節角速度を算出し,更に微分すること で関節角加速度を算出した. 2.4.3 運動力学的変数 関節間力,関節モーメント,サポートモー メント,関節パワー,仕事量を算出した.な お,関節モーメントの値は被験者の体重で除 することで,その大きさを正規化した.関節 パワー及び仕事量もこの値を用いた. 2.4 統計処理 統計処理は4条件間で対応のあり分散分 析を行った.なお,有意水準は5%と設定し た. 3. 結果 3.1 運動パフォーマンス 本研究では,4条件間(L,L+S,H,H+S)に 有 意 差 は 認 め ら れ な か っ た ( 跳 躍 高 : 0.48±0.07m, 0.45±0.07m, 0.47±0.08m, 0.44±0.08m )( 助 走 速 度 : 2.2±0.5m/s, 2.1±0.4m/s, 2.2±0.5m/s, 2.1±0.7m/s)ことから, 本研究程度の足関節の可動域の制限は運動 パフォーマンスに影響を与えないといえる 3.2 運動学的変数 立位時の足関節の可動域を測定した.その 結果,足関節の背屈角度と底屈角度共に有意 差は認められた.(背屈:35±8 deg,30±8 deg, 32±7 deg,28±8 deg)(低屈:24±4 deg,21±4 deg,21±5 deg,19±2 deg)下肢三関節の角度, 角速度及び角加速度を算出した.その結果, 関節角度の可動域においては足関節に有意 差が確認された.(52±11 deg,43±7 deg,48±8 deg,40±6 deg)膝と股関節では条件間で有意 差は認められなかった.角速度においては足 関節と膝関節に関して有意差は認められた. ( 足 関 節 : 852±96 deg/s , 692±54 deg/s , 809±104 deg/s , 663±89 deg/s 膝 関 節 : 932±135 deg /s,577±96 deg /s,566±117 deg /s, 856±116 deg/s)股関節には有意差はなかった. 角加速度においては足関節に関して有意差 が確認された(852±96 deg/s2,692±deg/s2,
809±104 deg/s2,663±89 deg/s2).膝,股関節で は有意差はなかった.(Fig. 1, 2, 3)
Fig. 1 Joint ROM
Fig. 2 Joint angle velocity
Fig. 3 Joint angle acceleration 3.3 運動力学的変数 跳躍動作中における関節間力と関節モー メントを算出した.下肢三関節ともに条件間 で有意差は認められなかった.接地中におけ る関節パワーの最大値に関して足関節と膝 関節には有意差は認められた.(足関節: 10.3±2.3 W /BW,9.3±2.0 W/BW,10.8±1.5 W /BW,9.2±2.1 W/BW 膝関節:19.8±2.2 W /BW , 18.8±2.1 W/BW , 20.1±2.7 W/BW , 19.4±3.3 W/BW).関節パワーの最小値は下肢 三関節ともに条件間で有意差は認められな かった.跳躍動作中の屈曲動作におけるネガ ティブな仕事量には有意差がなく,伸展動作 におけるポジティブな仕事量と重心の変位 には有意差があった.(足関節:0.72±0.12 J/BW , 0.61±0.08 J/BW , 0.67±0.11 J/BW , 0.61±0.15 J/BW 股関節:0.97±0.21 J /BW, 0.79±0.13 J /BW,0.88±0.16 J /BW,0.82±0.20 J /BW)( 0.749±0.138 m, 0.715±0.131 m , 0.727±0.145 m,0.706±0.160 m).試技中にお ける伸展サポートモーメントの割合は下肢 三関節共に条件間で有意差は認められなか った.接地中における全身の力積は条件間で 有意差は認められなかった. (Fig. 4, 5, 6)
Fig. 4 Joint power max
Fig. 5 Joint positive work
4. 考察 4.1 運動パフォーマンス 試技ごとの跳躍高と助走速度に違いが認 められなかったがサポーターを着用する方 に は 跳 躍 高 が 小 さ い 傾 向 が あ っ た . (p=0.052)標本数を増やしてさらに検討す れば有意差が出る可能性があると考えられ る. 4.2 運動学的変数 立位時の足関節の可動域と跳躍時の足関 節の角度について,全ての条件間で有意差が 認められ,足関節の可動域が靴の種類及び足 首サポーターによって制限されたことが明 らかであると考えられる.膝,股関節の角度 は足関節の可動域の制限の影響を受けなか ったと考えられる. 4.3 運動力学的変数 4条件における跳躍高と助走速度がほぼ 同じであったことから,跳躍動作は条件によ らず一定であったとみなすことができる.し たがって、下肢にかかる外力も条件によらず 一定であると考えられ,条件ごとの各関節の 骨間力を比較することは足関節の可動域の 制限による影響を明らかにできると考えら れる.しかしながら,有意差が認められず, 本研究の足関節の可動域の制限程度では各 関節の関節間力に影響は及ぼさなかった. 足関節の制限によって関節モーメントに 影響しなかった.足関節の制限によって関節 角度が影響を受け,ポジティブな関節パワー には有意差が確認された.跳躍動作中の屈曲 動作におけるネガティブな仕事量には有意 差がなく,伸展動作におけるポジティブな仕 事量には有意差があったため足関節の制限 により跳躍時の仕事が低減することが確認 された. 5. 結言 本研究は足関節の可動域の制限が跳躍時 の下肢関節の動作に及ぼす影響について、運 動パフォーマンス、運動学的要因、運動力学 的要因に着目して明らかした.その結果、以 下の点が示唆された. 足関節の可動域の制限が靴の種類及び 足首サポーターによって有効である. 本研究程度の足関節の制限がパフォー マンスに影響しない. サポーターとハイカットの靴を着用す ることは傷害予防及び運動の効率に対 して有益である. 参考文献
(1). Zhang SN, Bates BT, Dufek JS. Contributions of lower extremity joints to energy dissipation during landings. Med Sci Sports Exerc 2000;32:812–9.
(2). J.L. McNitt-Gray, Kinetics of the lower extremities during drop landings from three heights, J Biomech 26 (1993), pp. 1037–1046. (3). Yeow CH, et al, Non-linear flexion relationships of the knee with the hip and ankle, and their relative postures during landing, Knee (2010) Article in Press, Corrected Proof.