2013 年度情報処理学会関西支部 支部大会
C-07
鳥肌による不随意表現を用いたロボットとのコミュニケーションの提案
Human-robot Communication with Involuntary Expression Adopting Goose Skin
孟 暁順† 米澤 朋子†
Xiaoshun Meng Tomoko Yonezawa
1.はじめに
本研究では,人とロボットが共存し,自然にコミュニケ ーションを行うための方法を提案する.人間とロボットと のコミュニケーションでは,会話を行うことを中心として その他にも非言語情報などより豊かな表現を実現するため, 様々な研究が行われている. 人間と密接に関わるロボット のために,歩行などの動作や会話の際に表出する表情につ いての研究など,より詳細な表現に関する研究が行われて いる. 近年では,ネットワーク技術の進展により,人工知能の 技術を利用した処理をサーバで行うことができる.これに より,従来のデータ量では困難な処理を早急に行うことで, より自然なコミュニケーションを実現することが可能とな っている.このような背景より,会話や動作において人が 意識して行うコミュニケーションの研究分野はより発展し てきている. しかしながら,人間同士のコミュニケーションでは,会 話や動作,表情だけでなく,不随意で生ずる生理現象も重 要な役割を持っている.例えば,幼児は不快を感じると顔 をしかめるように,無意識に現れる反応がコミュニケーシ ョンにおいて重要とされている.したがって,本研究では, コミュニケーションにおけるロボットの生理現象による不 随意表現の効果を調査することを試みる.本稿では,不随 意表現として、鳥肌に焦点を当て,寒さによる不快感や恐 怖による不安を顔表情,言葉と組み合わせ,実験を行った 結果を報告する.2.関連研究
江刺らは,擬人化エージェントを用いたカウンセリング システム[1]を提案した.ユーザの入力文の評価が肯定的か, 否定的かにより,画像や,応答文のフィードバックを変化 させる.このシステムを利用することでユーザに「エージ ェントが話を聞いている」という感覚を与え,ストレスを 発散させることを目的としている.しかし,視覚情報のみ が提示されると,ユーザにとって,理解困難であるエージ ェントの感情が数多くある.そのため本研究では,表情と いう視覚情報の他に,聴覚情報や触覚情報を与え, わかり やすくロボットの感情をユーザに伝えることを目的として いる.聴覚情報は音声を用い,触覚情報は人間の生理現象 である鳥肌をロボットに適用した. 加藤[2]は,会話を通したロボットとのコミュニケーシ ョンにおいて,ユーザに心的作用をもたらすことを示した. ユーザが発話した音声から感情を推定し, その結果により 異なる出力を行う.さらに,ロボットに気分の概念を取り 入れ,ロボットに性格付けや個性化の実現を目指している. 本研究でも,個性や感情の研究を目指すが,音声だけで, 感情を推定することは難しい.そこで ,触覚情報として人 間の鳥肌のようなデバイスを作成した ,本システムは触覚 情報のみで感情などを表現できるものもあり,それを用い ることで,無意識的に起こる現象を伝えることを目指す .3.システム構成
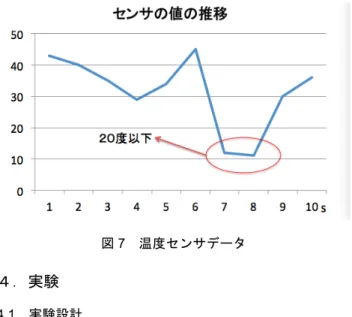
3.1 システム概要 図1システムの流れ まず,鳥肌を出す条件を設定する.現在では寒い情況を 表現する手法を実装した.システムの大まかな流れを図1 に示す.以下に詳細を説明する. 3.2 鳥肌駆動装置 鳥肌デバイス(図 2)は温度センサの値が20度以下に なると(図 7),寒さを検出し,モータによって爪楊枝が 上昇する(図 4),寒さを検出していない場合,モータに よって下降する(図 3),それによって,凹凸を表現し, それをユーザが触ることで,鳥肌のような触感を得ること ができる. 図2 鳥肌駆動装置の表面図 3 鳥肌を表出していない 図 4 鳥肌を表出している場合 場合 鳥肌装置の構造 図 5 中の構造 システムの構成を図 5 に示す,デバイスの中には木の棒 を四列並べ,四つのモータはそれぞれでその一列をコント ロールする,温度センサは側面に付いており,表面はシリ コンで覆われている. 図 6 鳥肌の制御構造 システムにより鳥肌を表現する際は,図 6 のようにモー タが回転して中のテグスを引っ張り,一列が図のように上 昇して,凹凸を表現する.この凹凸により,鳥肌のような 触感を表現する. 図7 温度センサデータ
4.実験
4.1 実験設計 ロボットの不随意表現としての鳥肌表現の効果を調べる ため,生理現象としての鳥肌と,感情表現としての鳥肌に ついて実験を行った.生理現象として,寒さを感じたとき の表現を設定した実験cold と,感情表現として,恐怖を感 じたときの表現を設定した実験fear を行った. 実験は,情報学部の学生20 名(男性 13 名,女性 7 名)で 行った.実験cold では「寒い」,実験 fear では「怖い」と 感じたときのロボットの表現が,被験者に伝わるかを検証 した. 図 8:実験風景 図 9:右腕に配置した鳥肌 表現装置 実験装置の構成と実験の様子を図 8 に示すとともに,鳥 肌表現装置の配置を図9 に示す.ロボットの顔としてタブ レット端末画面を胴体部分の上に配置し,ロボットの両腕 を想定した箱をユーザに向かって伸ばした状態とする.ロ ボットの右腕には,本研究で開発した鳥肌表現装置のユニ ットが埋め込まれており,被験者はこのユニット部分に手 を添えながら実験に参加する. 実験では,声の有無,表情の有無,鳥肌の有無によって, どのようにユーザの印象が変化するのか調べるため,被験 者内計画で各2水準の3要因の反復測定を行うこととし, 8 タイプのシステムを用意した. 各実験の手順を以下に示す. 実験 cold:被験者には実験用のロボットと対峙するよう に着席してもらい,ロボットを自由に触ってもらうように 示唆した.その後実験者がロボットに向けられた扇風機の 電源を入れ,ロボットが何らかの反応を示した後,アンケ ートに回答してもらった.実験 fear:被験者とロボットには対峙してもらったまま, 実験者が怖い話をする.それに対してロボットが反応を示 し.被験者に確認してもらった後,アンケートに回答して もらった. 実験cold と実験 fear の共通評価項目を以下に示す. Qa ロボットに好感が持てた Qb ロボットはあなたに気持ちを伝えようとしていた Qc ロボットに人間らしさを感じた Qd ロボットと仲良くなりましたか また,実験cold のみに以下の評価項目を用意した. Qe ロボットが寒いと感じているように見えた そして,実験fear には以下の評価項目を用意した. Qf ロボットは怖いと感じているように見えた 4.2 実験結果 順序交差した反復測定主観評価の結果を図 10,11 に示す. また,3 要因分散分析の結果を表 1,2 に示す.まず,実験 cold において,評価項目 Qd を除き,すべての要因で有意 差があった.グラフを見ると,表現モダリティが多いほど MOS (means opinion score)が高いことがわかる.個別の評価 項目を見ると,共通評価項目であるロボットに対する好感, ロボットによる気持ちの伝達と,実験cold の評価項目であ るロボットの寒さの表現に影響を与えることが分かった. また,ロボットによる気持ちの伝達では,顔表情と鳥肌表 現による交互作用から,顔表情がないときは特に鳥肌表現 の効果があることが認められた.また,実験cold の評価項 目はロボットの寒さに対する生理現象として考えられるが, 顔や言葉などの意識的な鳥肌表現が有効であることが確か められた. 次に,実験 fear において,すべての要因で有意差があっ た.怖いという感情の表現としても,鳥肌表現が有効であ ることが示された. 図 10:実験 cold における主観評価の結果 (*a:顔表情があり,b:音声があり,c:鳥肌があり) 図 11:実験 fear における主観評価の結果 表 1:実験 cold の主観評価の分散分析 Facial exp. Speech Goose skin Significant
interaction F p F p F p Qa 42.7 <.01 10.5 <.01 13.0 <.01 -- Qb 90.5 <.01 94.5 <.01 19.5 <.01 AB <.01 Qc 65.7 <.01 31.3 <.01 42.6 <.01 AC <.01 Qd 10.7 <.01 2.34 0.14 15.7 <.01 -- Qe 52.3 <.01 68.8 <.01 22.7 <.01 AB <.01 AC <.01 BC <.01 ABC =.04 表 2:実験 fear の主観評価の分散分析 Facial exp. Speech Goose skin Significant
interaction F p F p F p Qa 21.4 <.01 12.2 <.01 14.2 <.01 -- Qb 44.5 <.01 75.1 <.01 58.4 <.01 AB <.01 Qc 72.2 <.01 58.7 <.01 21.4 <.01 AB =.04 Qd 16.4 <.01 5.63 =.03 13.7 <.01 -- Qf 58.4 <.01 72.3 <.01 40.3 <.01 AB <.01 AC <.01 BC =.01 ABC <.01