論 文
画像 と力覚を用 いた砕石堆積量の推定 と堆積物の 3次元形状 に基づ くす くい取 り作業計画
高 橋 弘,* 山 崎 勝 幸 **
EstimationofTheAmountofRockPilebyUsingTheImageProcessingandForce SensorsandTaskPlannlngOrShovelingbasedonTheThreeDimensionalShapeorRockPile
by
HiroshiTAKAflAStlllandKaLsuyukiYAMAZAKI†† Abstract
lnthepreviouspaper,Weproposedthemethodtorecognizetheexistenceof therockpilebyuseoftheimageandlaserslitlight. Inthisstudy,Wepropose themethodtoestimatetheamountoftherockpilebyuseoftheimageandforce sensors. Inordertoestimatetheamountoftherockpile,threedimensional measurementoftherockpilewascarriedout. Furthermore,inordertodetect thecontouroftherockpile,theforcesensorswereused. Inthisexperiment, twostraingaugeswereusedasforcesensors.
Severalkindsofrockpilesweremadeandtheexperimentstoestimatethe amountoftherockpilewereconducted. Bycomparingtheestimated values andtheactualones,itwasconfirmedthatthemethodproposedhereworkswell. Furthermore,theshovelingtaskwasplannedbasedonthethreedimensional shapeoftherockpile.
KeyWoT・ds:ImageProcessing,ForceSensors,TaskPlanningofShoveling,Rock Pile
平成9年8月6日受付
*東北大学大学院工学研究科地球工学専攻
〒980‑77 仙台市青葉区荒巻字青葉
**東北大学大学院工学研究科資源工学専攻
〒980‑77仙台市青葉区荒巻字青葉 (現 日本道路公団)
IDepartmentofGeosclenCeandTechnology,Graduate SchoolofEnglneering,TohokuUniversity,Aramakl, Aoba‑ku,Senda1980‑77
千千DepartmentofResourcesEngineering,GraduateSchool ofEngineerlng,TohokuUniverslty,Aramakl,Aoba‑ku, Sendai980‑77
32
1.は じめ に
資源開発の現場,特 に地下資源開発の現場では過酷 な作業環境か らの作業員の解放および安全確保の面か ら作業 ロボ ットの導入 に多 くの期待が寄せ られている。
製造業 の分野で は既 に多 くの産業 ロボ ットが導入 され ているが,上述 の現場では作業環境が作業の進展 とと もに変化す ることか ら, これ らの現場 に導入 され る作 業 ロボ ッ トは, この作業環境の変化 に柔軟 に対応で き
るような機能を具備 していることが望 ま しい。
一般 に資源開発現場 にお ける採鉱作業は,掘削,土砂 ・ 鉱石 のす くい取 り,積 み込 みおよび運搬 ・排 出の工 程 に大別で きる。 これ らの作業 において,特 にホイ ール ローダあ るいはロー ドホール ダ ンプ (以下,LHDと 記す)などの積 み込 み機械を用いて行 う 「す くい取 り ・ 積み込 み工程 (以下,す くい取 り作業 と記 す)」 お よ び 「運搬 ・排 出工程」 に関 して言 えば,LHDの 自動 走行 は視覚 セ ンサ1),超音波距離計 2),電磁誘導線3)な どを用 いることによ り既 に実用化 の域 にある。 しか し, 土砂 ・鉱石 のす くい取 り作業 は,一部 にバ ケ ッ トに作 用す る抵抗 力 の検討 な どの例 4)5)が見 られ る もの の,
ほとん ど検討 されていないのが現状であ る。 このす く い取 り作業 の自動化 に対 して最 も大 きな障害 とな って いる要因 は,破砕堆積物 (以下,ず り山 と記す) の堆 積形状が不定形であ り,かつ作業 の進展 にともないず り山の堆積状態が常 に変化す ることであ る。そのた め す くい取 り作業 は, テ ィーチ ングプ レイバ ックのよ う な事前 に定型化 されたす くい取 り動作 の繰 り返 しだ け で は達成す ることは困難であ る6)。 このため, 現 在 の す くい取 り作業工程 は,熟練 オペ レー タによ る作業 , あ るいは遠隔操作 によ り行 われて いる7)。 しか し, 上 述 したよ うに, これ らの現場 は作業員 に とって過酷 で あることか ら, このような環境下 における開発機械 の 無人化 および ロボ ッ ト化 の早急 な実現が期待 されてい
る。
著者 らは前報8)において, レーザース リッ ト光 と画 像 を用 いてず り山存在 の有無判断および堆積状態 の認 識手法 を提案 した。本研究 で は,次 のステ ップと して レーザース リッ ト光 をスキ ャンさせ ることによ りず り 山を含む周囲の環境 の3次元情報 を取得 し, さ らに力 覚 を組 み合わせ ることによ りず り山の堆積量 を推定す る手法 を提案す る。 さ らにず り山の3次元情報 を基 に バ ケ ッ トの貫入点 および貫入方向を決定す る手法 につ いて考察 し,す くい取 り作業工程 の自動化 に資す る こ とを 目的 とす る。
2.ず り山の堆積 量推 定 の原 理 2.1ず り山の3次元形状計測
土砂 ・鉱石 をバ ケ ッ トによ りす くい取 る場合, コ ン ピュータがバ ケ ッ トの移動軌跡 を決定 し,その軌跡 に 沿 ってバ ケ ッ トが移動す るよ うにアクチ ュエー タであ る油圧 シ リンダを制御す ることにな る。決定 された軌
跡 が不適切で土砂 ・鉱石が十分 にす くい取 れない場合 には作業効率が極端 に悪 くな る。すなわち,土砂 ・鉱 石がバ ケ ッ トに十分 に取 り込 まれ,効率の良 いす くい 取 りを 自動的 に行 うためには作業対象物全体 の形状 お よび堆積量 を推定 し, この結果 を基 に した最適 な作 業 計画 を構築す ることが重要であ る。
前報で は, レーザース リッ ト光が照射 された1ライ ン上 の点 の3次元情報 を取得 した。 しか し,ず り山全 体 の情報 を取得す るには1ライ ンのみで は不十分で あ る。そ こで,図 1に示す ように, この レーザ ー ス リッ ト光 をず り山全体 に対 して スキ ャンさせ,ず り山全 体 の3次元情報 を取得す る。 レーザース リット光をスキャ ンさせて対象物 の3次元情報 を取得す る方法 は従来 か ら提案 されてお り9),特 に新 しい手法で はな い。 しか し, レーザース リッ ト光 を用 いた3次元情報 の取 得 で は,ず り山を含む周囲全体 に対 して距離計測を行 うこ とにな る。従 って,ず り山全体 の輪郭 および堆積量 を 認識す るためには,計測 された3次元情報 か らず り山 のみを抽 出 しなければな らない。 このず り山の抽出 に は,ず り山全体 をCCDカメ ラなどで撮 影 し, その画 像を処理 して,例 えばェ ッジ検 出などによ り,ず り山 の輪郭 を抽 出す る方法が考え られ る。 しか し,ず り山 などの自然界 の対象物 に対 して エ ッジ検 出によ り対象 物 のエ ッジが連続 して得 られ ることは極めて稀である。
つ ま りこの方法でず り山のみを検 出す るには未解決 の 問題 が多 々残 されているのが現状であ る。そ こで, 本
Fig.1 Schematicdiagram ofthreedimensional shapemeasurementbyuslng the laser slitlightandCCD camera
高橋 弘 ・山崎勝幸
Fig.2 Determinationoftheboundarypointbet‑ WeenFaceandRockPileandtheonebet‑ weenRockPileandFloor
研究では,ず り山全体の輪郭および堆積量を認識す る ために,さらに力覚情報を用いることにす る。
ところで,前報で,視覚セ ンサによ りサ ンプ リング された 「ず り山を含む画像」で は,その堆積パ ター ン は,1)壁面 ‑ず り山 ‑地面,2)ず り山 ‑地面,3) 壁面 ‑ず り山および4)ず り山のみの4パ ター ンの内 のいずれかであり, このパ ターンを認識す る手法 につ いて述べた。 これ らの画像の内,全体のず り山の堆積 量が推定で きるのは 1)のパ ター ンの時で あ る。つ ま りこの画像か ら壁面 とず り山および地面 とず り山の境 界点 を見出さなければな らない。
本研究では,壁面 とず り山および地面 とず り山の境 界点の取得を図2のように,それぞれの レーザースリッ ト光の ライ ンにおける距離計測結果か ら求めるもの と す る。 まず壁面 とず り山の境界点 で あ るA点 の取得 は,Y方向の距離計測結果 の最大値 で あ るLmaxに 対 して, しきい値 K を設定 し, この しきい値 と距離 計測結果 との交点をA点 とす る。
地面 とず り山の境界点 であ る 月点 に対 して も,上 述 したA点 と同様の方法で取得す る。すなわち,Z方 向 の距離計測結果 の最小値 で あ るHminに対 して,
しきい値Zsを設定 し, この しきい値 と距離計測結果 との交点を β点 とす る。 しか し, この β点周辺 はず り山か ら崩れ落ちた土砂などが散在 しているなどの理 由か らしきい値 は環境 に依存す る度合 いが強 く,常 に 一定の しきい値Zsを設定 す ることは望 ま しくない。
この B点 はず り山の裾野部分 の点 で あ り,積 み込 み 機械がず り山をす くい取 る際 にバケ ッ トを貫入 させ る 目標 となる点であるため,非常 に重要な点であると考 え られ る。従 って,本研究では, この β点の取得 に関
し,実際にバケ ッ トで裾野近辺を触 り,その力覚 か ら ず り山 と地面 との判別を行 い,β点 を取得す る方法 を 提案す る。ただ し,多数の ライ ンに対 して, この方法 によりβ点を取得す るの は,長 時間 を要 し非効率的 であることか ら,ず り山の中央付近の 1ライ ンを選択 し. このライ ンに対 してのみ力覚を用 いて しきい値 で あるZsを求め,その値を用 いて B点を得 るとともに,
このZsの値を他 のライ ンに適用す るものとす る。
なお しきい値 Ysについては,実際 にバ ケ ッ トが壁 面の所 までは届かないことおよび壁面 には凹凸がある ちのの,破砕 された岩石 は落下 してず り山を形成 して お り,裾野付近 と比べて環境 の依存度 はさほど大 き く ないと仮定で きることか ら,一定値を仮定 し,試行錯 誤 により決定す ることにす る。
2.2力覚情報の適用
本研究では,バケ ッ トのアームに歪みゲージを付け, バケ ッ トに作用す る抵抗力か らず り山と地面を判別 し, ず り山 と地面の境界である裾野の点を認識 す る。 図3 に裾野点を認識す る際のバケ ッ トの動 きの模式図を示 す。 このように手前の地面側 か ら y方 向 に, あ る一 定の間隔でバケ ットを対象物 に貫入 させて,それぞれ の位置で抵抗力を測 り,相手が地面かず り山かの判別 を行 う。本研究 では地面 と判断 された点か らず り山 と 判断 された点 に推移 した時,その2点の中点を裾野点 と認識す る。すなわち,B点 の座標 (ⅩF,YBr,ZB・), は,次式 により得 られ るものとす る。
XB‑ (x2+X3)/2 (1) YB‑ (Y2+Y3)/2 (2) ZB‑ (Z,+Z3)/2 (3) ここに,(Ⅹ2,Y2,Z2)および (Ⅹ。,Y3,Z3)は図 3
(裾野点) β
Fig.3 Schematicdiagram ofthebucketmove一 menttodeterminetheboundarypointbet‑ weenRockPileandFloor
の2および 3の位置 にバケ ットがある時,バケ ッ トの 先端がず り山の表面 に触れた時の位置 であ る。 なお, (3)式で得 られ るZBが境界点取得 にお け る しきい値zs
となる。
ず り山 と地面の判別 は,バケ ッ トがず り山 と地面 の それぞれへ触れた際 にバケ ッ トに作用 す る抵抗力 が, ず り山の場合 と地面の場合 とでは異なることを利用す るが, ここで問題 となるのは,両者の場合 の抵抗力 を 区別す るための しきい値 の設定で あ る。 本研究 で は, この しきい値決定 は,実験 により試行錯誤的に決定 す るもの とす る。
2.3破砕堆積物の輪郭情報および堆積圭推定法 図4にず り山の量を取得す る方法の概念図を示 した。
ず り山の輪郭情報の推定 は,それぞれの ライ ンの 「壁 面 とず り山の境界点」および 「地面 とず り山の境界点」, すなわちA点 およびB点を,それぞれ順 に直線 で結 んだ ものをず り山の輪郭であると近似す る (図中の太 線)。図4中の○で示 した点 は,三次元情報 と して認 識 している点である。
次 にず り山の堆積量の取得 は,以下のよ うに して行 う。図4に示す ように,それぞれの ライ ン上の計測点 において,ある計測点1点の近隣の2点か らな る三角 形 に着 目す る。 この三角形 をず り山 の表面 と近似 し,
Fig.4 CalculationmethodoftheRockPile volume
その表面の下部 にあるず り山の体積を(4)式 により求め る。
U‑底面積×(hl+h2)/2 (4) この微小体積Uをず り山全体 について求めて合計すれ ば,ず り山の堆積量が求め られ る。
2.4 す くい取 り作業計画の構築
効率的なす くい取 り作業を自動的に遂行す るために は,1回のす くい取 り作業で土砂 ・鉱石 がバ ケ ッ トに 満載 されるようにバケ ッ トを制御す ることが必要であ り,そのためには対象物であるず り山に対 して, どの 点か らどの方向にバケ ットを貫入 させ, どのようにバ ケ ッ トを移動 させればよいかをコンピュータが自動的 に決定す る必要がある。 ここでは,貫入点,貫入方 向 および移動軌跡の生成を作業計画 の構築 と定義す る。
なお,す くい取 り作業の際にはず り山の上部か ら掘削 す るのではな く,一般 にバケットの先端,すなわちカッ ティングェ ッジを地面の レベルの高 さでず り山に貫入 させ ることか ら,貫入点をず り山の裾野上 に決定す る こととす る。
1)貫入点および貫入方向の決定
バケ ッ トの貫入点および貫入方向 は,厳密 には作業 ロボ ッ トとず り山 との相対位置関係を基に,作業 ロボッ
トの移動時の機構上の制限などを考慮 して決定 される べ きであると考え られ る。 しか し,本研究では作業 ロ ボ ッ トの移動機構 については検討 していないため,移 動機構を も含めた最終決定法 は今後 の課題 とし, ここ で は作業 ロボ ッ トとず り山 との相対位置関係 に基づ く 貫入点および貫入方向の決定 について考察す る。
図5に示すように,2.1お よび2.2の方法 によ り 求め られたそれぞれ の ライ ンの裾野点, いわゆ るB 点を貫入候補点 として (図中の●印), この中か ら貫 入点を決定す る。す くい取 り時の作業 ロボ ッ トの動 き 等を考えると,貫入点 は作業 ロボ ッ トによ り近 い方 が 効率的 と考え られ る。よって,作業 ロボ ッ ト (作業前 には静止 していると仮定す る) の原点 (本研究 で は, CCDカメラの レンズ中心か ら鉛 直方 向 に下 ろ した線 が地面 とあたる点 とす る)か ら最 も近 い点 を貫入点 の 候補 とす る。また貫入方向は,作業 ロボッ トの原点 と 買入候補点を結んだ方向をまず仮定す る。次 にバケ ッ トの移動軌跡 については,図6(1)に示すよ うに,従来 の研究 に従 って,2次曲線を仮定 し,次式 で与 え るこ とにす る。
高橋 弘 ・山崎勝幸
ず り山の輪郭 レーザー ス リッ ト光
Fig.5 SchematlCdiagram ofthedeterminatlOn forthepenetrationpointandpenetration direction
Z
朔
(1)
O 計軌 貴 レー ザー ス リッ ト光
(2)
Fig.6 Estimation method ofscooplng VOlume bythebucket
Z‑ (Y‑a)2 (5)
す なわ ち,裾野点 を原点 と し,その裾野点 か ら一 定 の 距離aだ け直進 し,その後 は(5)式 で与 え られ る軌跡 に 従 うよ うにバ ケ ッ トを制御 す る。
2)す くい取 り体積 の推定
1)で求 め られ た買入点 およ び貫 入 方 向 にバ ケ ッ ト を買入 させ, さ らに(5)式 に従 ってバ ケ ッ トを上昇 させ た時 にす くい取 られ る鉱石 の量 を3次元計測結果か ら 推定 し, この値 がバ ケ ッ ト容量 に対 して十分 でな い場 合 は,貫入方 向を見直す。
バ ケ ッ トを上昇 させ た時 にす くい取 られ る土砂 ・鉱 石 の量 は以下 の よ うに して推定 す る。 図6(2)は, 図6 (1)をZ方 向か ら見 た図で あ るが,太線 はバ ケ ッ トが貫 入 し,す くい取 る際 のバ ケ ッ トの外 側 の軌 跡 で あ る。
よ って, これ らで囲 まれ た体積,す なわち図7で示 し た白色 の部分 の体積 がバ ケ ッ トを貫入 した際 のす くい 取 り可能 な量 と考 え ることがで きる。 なお,本研 究 で は この体積 を ̀̀す くい取 り体積" と呼 ぶ こ とにす る。
このす くい取 り体積 を求 め る場合,ず り山表面上 の各 点す なわ ち図6(2)にお け る×印の点 の三次元座標 を求 め,それを基 にす くい取 り体積 を求 め る必 要 が あ る。
しか し, この ×印 の点 は計測 されて いな い た め, 図6
(2)の よ うに左右 の計測点 か ら推定 す る ことにす る。 す なわ ち,×印の点 の二次元座標 の うちXお よ びY座 標 は直線 1と直線2の交点 と して求 め ることがで きる。
またZ座標 は,直線 1で切断 したず り山 の断面 を 図8 のよ うに近似す れば,図 に示す よ うに相似条件 か ら推 定 す ることが で き る。 す なわ ち, 求 め るZ座 標 をzT
と した時,zTを(6)式 の よ うに近 似 し,A点 お よ びC
ず り山
Bucket Flg.7 SchematlCdlagram OfscooplngVOlumeby
thebllCket
計測点
‑ 一
一 一三 三
Fig・8 Crosssectionoftheverticalplanecontain‑
ingLine1
点を計測点 として,D 点 は,三角形 ABCお よび三 角 形DECの相似条件で求めることがで きる。
zT‑22‑号×老 霊 (6) このように して求 め られた×印の三次元座標を用いて, 図7で示すA面およびB面の面積 を求める。
図9はA面 あるいはB面を模式 的 に示 した もので あるが, この面積 を以下の計算法 により求める。す な わち,Pの領域では(7)式を,Qの領域では(8)式 をそれ ぞれ用いる。なお, (αy+β)はそれぞれの傾斜面 に おける直線の式である。
Sp‑∑U(ay+ β)dy] (7)
Fig・9 Calculationmethodofsideareaofscoop‑
edvolumebythebucket
Sq
‑
∑ut(αy+ β)‑b‑a)2)dy] (8) (7)式および(8)式 よりA面 とB面 の面積 を求 め, す くい取 り体積 は,その2面 を底面 とす る角錐台 と近似 す る。すなわち,次式です くい取 り体積VTを求 める。
v T ‑ ‡( S A
+SB・J瓦 云) (9)(9)式です くい取 り体積を推定 した結果,十分なす くい 取 り量 を得 ることがで きないと判断 された場合 には買 入方向を見直す。 この際 には買入方向を数度ずつ変化 させてす くい取 り体積量 を推定す る。いずれの方向で も十分なす くい取 り体積が得 られない場合 は,その貫 入候補点をキ ャンセル し,貫入点を作業 ロボ ッ トか ら 2番 目に近 い点 に設定 し直 し,す くい取 り量 の推定 を 行 う。なお,す くい取 り体積が十分であるか否かの判 断 は, ここでは便宜上 推定 されたす くい取 り体積 が バケ ット容量 より大 きくなるか どうか とした。
3.実験装 置お よび実験方法
本実験 に用 いた装置の概略を図10に示 した。 この図 に示 され るように,実験装置はCCDカメラとレーザー 光照射装置か ら構成 され るユニ ッ トとこれを回転 させ るステ ッピングモータ,マニ ピュ レータ,画像処理装 置,動歪計,パーソナル コンピュータか ら構成 されて いる。装置 は1)画像処理部 と2)抵抗力検 出部 の2 つに大別 され る。
1)画像処理部 :概略 は前報で示 した もの と同 じで あ る。CCDカメラの光軸 は水平方 向か ら10度下 向 きに セ ッ トし, カメ ラと レーザ ー光照射装 置 との間隔 は
マニピュレータ
Fig・10 Schematicdiagram oftheexperimental apparatus
38 高橋 弘 ・山崎勝幸 100mmである。本実験では, このユ ニ ッ トの下 にス
テ ッピングモータをセ ットし,ユニ ッ ト全体が回転 で きるように した. ステ ッピングモータはパーソナル コ ンピュータか ら信号をモータ ドライバーに送 ることに より制御 した。CCDカメラは前報 と同様 にSONY社 製CCM‑MClを用いた。なお,アナ ログ画像 は本実 験装置により512×512画素 に標本化 され,それぞれ の 画素 に対 して256階調 に量子化 され, デ ィジタル画像 に変換 される。
実験では,ユニ ッ トを45度ずつ回転 させて撮影 を行 い,前報で示 した方法 によりず り山の有無判断を行 う。
「ず り山無 し」 と判断 された場 合 には, ユニ ッ トを45 度回転 させて再 び撮影を行い,有無判断 を行 う。 「ず
り山有 り」 と判断 された場合 には,その地点 (初期位 置 と記す)か らず り山に対 して左方向に10度ずつユニッ
トを回転 させてず り山の有無判断および3次元距離計 測を行 う。 ス リッ ト光がず り山か らはずれて 「ず り山 無 し」の状態 にな った場合 は,初期位置 まで戻 り,吹 に上述 と同 じ計測をず り山に対 して右方向に行 う。
2)抵抗力検 出部 :抵抗 力検 出部 はマニ ピュ レー タ, バケ ッ ト,動歪計,A/Dコンバ ータお よびパ ー ソナ ルコンピュータよ り構成 され る。バケ ットのサイズは 図10に示す通 りであ り, このバケ ッ トをマニ ピュ レー タの手首部分 に設置 した。なお,マニ ピュレータの手 首部分 とバケ ッ トとの間にはアク リル製の円筒を設置 し,円筒の上部および側面 に歪みゲージを1枚ずつ張 り付 け,バケ ッ トがず り山に貫入す る際の抵抗力を計 測 した。なお,歪 ゲージを上部および側面の2個所 に 貼 り付 けたのは,バケットの上下および左右の曲げモー メン トを同時 に計測す るためである。歪ゲージか らの 信号 は動歪計およびA/Dコンバータを介 してパーソ ナルコンピュータに取 り込んだ。実験 に先立 ち,重量 に既知の重 りをバ ケ ッ トに吊下 げ,曲げモーメ ン トを 計測 し,荷重 と曲 げモーメン トの関係を示す較正曲線 を得た。実際の実験で は, この較正曲線を基 にバ ケ ッ
トに作用す る力を逆算 した。
4.実験結果 お よび考察 4.1抵抗力
図11にバケ ッ トをず り山および地面へ押 し込んだ と きの抵抗力を示す。なお縦軸の値 は歪みゲージ 1お よ び2の平均値を示 している。 この結果か ら,本研究 で
地iiF 地℡ ‑ir‑LJ山 ・rリLL1 すLJ山
Fig.ll Resistiveforcesactingonthebucket
はしきい値を2kgfとしてず り山 と地面 を判別 す る も のとす る。判別実験で は,ず り山および地面 に対 して バケ ッ トを20回押 しつけ,相手が地面であるかそれ と もず り山であるかを判断 させた。その結果,19回 は正 しい判断を示 した。唯一 の誤判断 は,堆積層 の薄 いず り山に対 して生 じたが, この場合 は層が薄いためす ぐ 下の地面 に触れて しまったためで あ ると推測 され る。
しか しなが ら,バ ケ ッ ト‑作用す る抵抗力 によるず り 山 と地面 との判別 は, はば有効であると考え られるゆ え,本研究で は, この力覚情報 によるず り山 と地面 と の判別法を用いることに した。
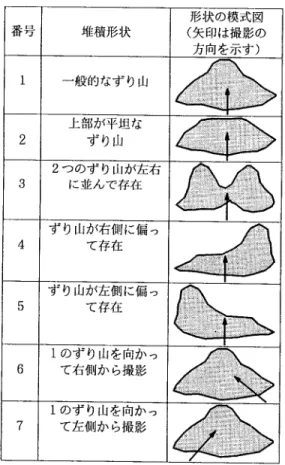
4.2 破砕堆積物の輪郭および堆積量の推定 実験では,ず り山を構成す る粒子の量を一定にして, ず り山の形 を表 1に示すように変化 させて堆積量 の推 定を行 った。図中の矢印の方向は撮影 の方向を示 して お り,1‑ 5では切羽面 の前 にあるず り山を切羽面 に 対 して垂直な方向か ら撮影 していることを示す。なお, ず り山全体 の体積 は19000cm3である。
図12に レーザをスキ ャンさせてず り山全体 の形状 を 計測 した結果の一例 を,また表2にず り山堆積量 の推
/′TL\〜
丁 \、\ゝ ・、 、
ノ 二 ゝ
I‑‑‑1‑‑‑‑‑‑‑̲̲‑I‑‑ ‑ ・‑L
亡 巳 上 ≧
L 「′ ̲̲′ ⊥ ⊥
B= 100nm
Fig.12 Anexampleofthreedimensionalmeasu‑
rements(No.3RockPllelnTable1)
Table1 Theshapeoftherockpileusedinthis experiment
番号 堆積形状 (形状の模式図矢印は撮影の方向を示す) 1 一般的なず り山
2 上部が平坦なず り山
3 2つのず り山が左右に並んで存在
4 ず り山が右側に偏 って存在
5 ず り山が左側に偏 って存在
6 1のず り山を向か って右側か ら撮影
7 1のず り山を向か って左側か ら撮影
Table2 Comparisonbetweentheestimatedvol‑ umesoftheRockPileandactualvalues
F番号 推定 した堆積量[cm3] 推定値/実際の値「 1し 」 … 1 18300 : 0.96
定結果を示 した。実際の画像 と比較 してみ ると, ほぼ 正 しく3次元形状が計測 されていると考えることがで きる。また,堆積量の推定結果 も実際の堆積量 とほぼ 同 じ値を示 してお り,堆積量 の推定法 はほぼ妥当な も
のであると考え ることがで きる。 しか し,(6)および(7) の堆積量が実際の値 よりも多少大 き くな って い るが, この場合 は切羽面 に対 して斜めの方向か らず り山を撮 影 してお り,本手法では,撮影の方向に対 してず り山 の裏側 に見えない空間部分が存在す ると, この部分 も ず り山 として計算 して しまうためである。なお,ユニッ トを回転 させて画像 のサ ンプ リングを行 い,ず り山全 体の堆積量を推定す るまでに,平均 して約40秒を要 し た。
4.3す くい取 り作業計画の構築
計測 されたず り山の3次元情報を基 に,上述 した方 法 により貫入点および貫入方向を決定 し,その位置 に マニ ピュレータによりバケ ッ トを移動 させ,す くい取 り作業を実行 させた。実際のす くい取 り作業ではバケッ トに作用す る抵抗力を計測 し, この値をコンピュー タ に取 り込んで,作業 の状態,すなわちバケ ッ トが大 き な岩 に衝突 していないか,作業は順調に進行 し,バケッ トに十分 に土砂 ・鉱石が入 っているか どうか といった 判断を行い,適切でないと判断 された場合 にはバケ ッ トの軌跡を修正す るなどといった制御が必要 になって くると思われ る。本実験で は抵抗力の計測 は可能であ るが,現時点では作業が順調であるか否かの判断 に関 す る研究 はほとん ど行われていないことか ら,適切 な 判断がで きなか ったため,移動軌跡を修正す る制御 は 行 っていない。つ まり,バケ ッ トがず り山に貫入 して か らは,作業の状態 に関わ らず,(5)式で示 された軌跡 にバケ ッ ト先端が沿 うようにマニ ピュレータを制御 し ている。実験 によってはバケ ットが所定の距離 まで貫 入で きないことなどが生 じ,す くい取 り量 は常にバケッ
ト容量 に等 しいという結果 は得 られなか ったが,平均 して常 にバケ ッ ト容量の約9割をす くい取 るといった 結果が得 られた。
5.むす び
本研究では, レーザース リット光をスキ ャンさせ る ことにより,ず り山を含む周囲の環境の3次元情報 を 取得 し,さらに力覚を組み合わせ ることによりず り山 の堆積量 を推定す る手法を提案す るとともに,ず り山 の3次元情報を基 にバケ ッ トの貫入点および貫入方 向 を決定す る手法 について考察 した。その結果,撮影方 向によっては,ず り山の裏側 に見えない空間部分が存 在す るような場合 には,ず り山全体の堆積量を大 き く
40 高橋 弘 ・山崎勝幸 推定す ることもあるが,概ね堆積量の推定値 と実際 の
値 とは一致 し,ず り山全体 の堆積量を比較的短時間 に はぼ推定 し得 ることが分か った。 またず り山の3次元 情報を基 に したす くい取 り作業計画の構築を試みた結 果,常 にバケ ッ トの容量 に近 いす くい取 り作業を行 え
ることが確かめ られた。
今後 は,す くい取 り時におけるバケ ッ トに作用す る 抵抗力および作業 ロボ ットの移動機構を も含めたす く い取 り作業計画の構築の検討が必要であると考え られ る。
参考文献
1) M.St‑Amant,etalり Proc.ofthelstlnt. symposium onMineMechanizationandAut0‑
mation,pp.6.1‑6.10,1991
2) 氏.H.Kingeta1.,Proc.ofthelstlnt・Sympo‑
sium onMineMechanizationandAutomation,
pp.6.3ト6.44,1991
3) T.Gochoetal.,Proc.ofthe9thInt.Sympo‑
sium onAutomationandRoboticsinConstruc‑ tion,Vol.2,pp.803‑812,1992
4) A.Hemami,Proc.ofthe2ndtnt.Symposium onMineMechanizationandAutomation, pp.
415‑424,1993
5) 高橋 弘,塚本 佳明,中野 栄二, 日本機械学 会論文集 (C),Vol.63,No.609,pp.85‑91,1997 6) 鎌田 博之,高橋 弘,第5回建設 ロボ ッ トシ ン
ポジウム論文集,pp.27‑36,1995
7)絹笠 真也,浜田 展男,種子田 定博,第5回 建設 ロボ ットシンポジウム論文集,pp.5‑10,1995 8) 高橋 弘, 山崎勝幸, 素材物性学会誌,Vol.9,
No.2,pp.79‑86,1996
9) 例えば画像処理‑ ン ドブック編集委員会編,画像 処理‑ ン ドブック,pp.394‑395,1987