九州大学学術情報リポジトリ
Kyushu University Institutional Repository
集中系モデルを用いたモデルベースの能動騒音制御
久野, 翔太郎
https://doi.org/10.15017/1931906
出版情報:Kyushu University, 2017, 博士(工学), 課程博士 バージョン:
権利関係:
集中系モデルを用いた モデルベースの能動騒音制御
2018 年 1 月
九州大学大学院 工学府 機械工学専攻
久野 翔太郎
目次
記号表 iv
第 1 章 緒言 1
1.1 能動騒音制御 ··· 1
1.1.1 受動騒音制御と能動騒音制御 ··· 1
1.1.2 閉空間内の能動騒音制御 ··· 3
1.1.3 モデルベースの能動騒音制御 ··· 6
1.2 本研究の目的 ··· 8
1.2.1 これまでの研究の問題点 ··· 8
1.2.2 本研究の目的 ··· 9
1.3 本論文の構成 ··· 10
第 2 章 音響空間とスピーカの連成モデル 11
2.1 スピーカ・マイクのモデル化 ··· 112.2 1次元音響空間とスピーカの連成系モデル ··· 12
2.2.1 1次元音響空間の集中系モデル ··· 12
2.2.2 スピーカと音響空間の連成部のモデル ··· 14
2.2.3 連成系の運動方程式··· 15
2.3 2次元音響空間とスピーカの連成系モデル ··· 16
2.3.1 2次元音響空間の集中系モデル ··· 16
2.3.2 スピーカと音響空間の連成部のモデル ··· 18
2.3.3 連成系の運動方程式··· 19
2.4 音響測定実験による解析モデルの妥当性の確認 ··· 19
2.4.1 スピーカモデルの妥当性確認 ··· 19
2.4.2 1次元モデルの妥当性確認 ··· 22
2.4.3 2次元モデルの妥当性確認 ··· 26
2.5 まとめ ··· 28
第 3 章 騒音源と制御音源を対称配置した制御系の制御限界 30
3.1 状態フィードバック制御系の設計 ··· 303.1.1 制御系の低次元化と状態フィードバック系の設計 ··· 30
3.1.2 制御効果の解析方程式 ··· 32
3.1.3 ディジタル再設計によるコントローラの離散化 ··· 33
3.2 1次元音響空間における制御限界 ··· 34
3.2.1 波動方程式による制御限界の検討 ··· 34
3.2.2 モデルベースフィードバック制御の制御限界 ··· 39
3.3 2次元音響空間における制御限界 ··· 46
3.3.1 波動方程式による制御限界の検討 ··· 46
3.3.2 モデルベースフィードバック制御の制御限界 ··· 50
3.3.3 制御音源の配置による影響 ··· 58
3.4 制御効果の有効性の実験検証 ··· 58
3.4.1 実験装置 ··· 58
3.4.2 制御系のモデル化 ··· 58
3.4.3 1次元音響空間における制御効果の有効性の実験検証 ··· 61
3.4.4 2次元音響空間における制御効果の有効性の実験検証 ··· 64
3.5 まとめ ··· 67
第 4 章 音源を空間に非対称配置した場合の制御限界
とモード群低干渉化による制御限界の改善手法の提案 69
4.1 対称空間における音源の非対称配置時の制御限界 ··· 694.1.1 波動方程式による制御限界の検討 ··· 69
4.1.2 制御音源の配置による影響 ··· 74
4.2 1次元音響空間を対象とした低干渉制御による制御効果改善 ··· 76
4.2.1 1入力のモデルベースフィードバック制御効果 ··· 76
4.2.2 モード群間の低干渉制御 ··· 78
4.2.3 モード群間の低干渉制御系の設計 ··· 80
4.2.4 数値計算による低干渉制御の有効性の確認 ··· 82
4.3 複雑な2次元音響空間を対象とした低干渉制御による制御効果改善 84 4.3.1 複雑な2次元音響空間内のモード解析 ··· 84
4.3.2 1入力系の極配置設計による制御 ··· 86
4.3.3 モード群間の低干渉入力の設計 ··· 86
4.3.4 数値計算による低干渉制御の有効性の確認 ··· 88
4.4 まとめ ··· 89
第 5 章 結言 91
謝辞 94
参考文献 95
記号表
定数・変数
A: 円筒管の断面積
As: スピーカの等価断面積 c: 減衰係数
ca: 音速
cs: スピーカの機械的減衰
cs: スピーカの電気回路の減衰を含む減衰 d: 騒音
de: 計測できる騒音の値 D: 円筒管の直径
Ds: スピーカの等価直径 em: マイクからの出力電圧
es: スピーカへ印加する電圧 h: 音響空間の厚さ
Ia: アクティブインテンシティ ɶj : 虚数単位
J : 評価関数 k: ばね係数
ka: 波数
ks: スピーカの機械的剛性
Kp: スピーカのパワー係数 l: 要素⻑さ
m: 音響管の⻑さ,音響空間の辺の⻑さ m: 質量
N : 自由度
N0: 零固有値の数 p0: 大気圧
dp: 音圧
qc: 制御音源の体積速度
qn: 騒音源の体積速度
rs: スピーカのボイスコイルと内部抵抗の和 t: 時間
Td: DSP の遅れのむだ時間 Tm: マイクの感度係数
Ts: サンプリング周期 u: 入力
v: 空気の粒子速度
vc: 制御音源の体積速度 vn: 騒音源の振動速度 V0: 平衡状態の要素体積
Vɶ: 音響モード正規化体積 dV : 要素の体積変動量
x: 質点の変位 y: 質点の変位
yo: コントローラの観測値
αb: 基礎減衰に関連する定数ゲイン αc: 結合減衰に関連する定数ゲイン αG: 低干渉制御に関連する定数ゲイン
β: 離散化の次数 ρ0: 空気の密度
γ: 比熱比
µ′: 体積粘性係数
ξs: スピーカの振動板の変位 δ: ディラックのデルタ関数 ω: 固有角振動数
Ω: 加振角振動数 ζ: モード減衰比 λ: 固有値
σ: モード減衰率 dσ: 法線応力
行列・ベクトル
A: コントローラのシステム行列 B : コントローラの入力行列 C: 減衰行列
C: モード減衰行列
Co: コントローラの出力行列 D: コントローラの外乱行列
G: 騒音の作用する位置を表す係数行列
G: モード座標における騒音の作用する位置を表す係数行列 H : 入力の作用する位置を表す係数行列
H : モード座標における入力の作用する位置を表す係数行列 Ι: 単位行列
K: 剛性行列
K: モード剛性行列
Kc: フィードバックゲイン
Ke: カルマンゲイン M : 質量行列
M : モード質量行列
P : リカッチ代数方程式の解 q : コントローラの状態量
ˆ
q : コントローラの状態量の推定値 Q: システムノイズの共分散行列 R: 観測ノイズの共分散行列 Τp: 音圧を変位に変換する行列
x : 変位ベクトル
Φ: 変位ベクトルのモーダルマトリクス Ψ : 音圧ベクトルのモーダルマトリクス
η: モードベクトル 0: ゼロ行列
集合
E: 正の整数のうち偶数の集合
Nc: 制御対象モードの集合 O: 正の整数のうち奇数の集合
ℝ: 実数の集合 ℤ: 整数の集合
添え字
a: 音響空間の変数 d: 遅れモデルの変数 e: 奇数次モード成分
f : バンドバスフィルタの変数 ,
i j: 要素番号 ,
l m: x y, 方向のモード次数成分 n: 制御対象モード
o: 偶数次モード成分 r: 余剰モード
s : スピーカの変数 ,
x y: 音響空間の方向
z: ディジタル制御系の変数
第 1 章 緒 言
1.1 能動騒音制御
1.1.1 受動騒音制御と能動騒音制御
工事現場や工場内の機械から発生するような人間にとって不快な音は騒音と 呼ばれる.騒音は,精神的・身体的な悪影響を人に及ぼすため,対策が工学的 に重要な課題となっている.騒音の対策には,大きく分けて受動的な手法と能 動的な手法の 2 通りがある.受動的な騒音対策は受動騒音制御(Passive Noise
Control, PNC)と呼ばれ,外部からのエネルギ供給を必要とせず,境界面の形状
および吸音特性を吸音材や制振材を用いて変更し,音響空間の特性を変化させ るものである.受動騒音制御による騒音対策では,高周波騒音に対しての制御 効果は高いが,機械騒音等に代表されるような低周波騒音に対しての制御効果 が不十分であることが知られている.したがって,低周波騒音に対して受動騒 音制御のみで対策を⾏う場合には,騒音の波⻑に合わせたサイズの大きな壁や 大量の吸音材などが必要となり,コストが高くなってしまう.一方,1933 年 に提案された Lueg(1)(1933)の特許におけるアイデアを基本とする能動騒音制御
(Active Noise Control, ANC)は,騒音に対して別の音源から音を出力し,騒音と
重ね合わせることで音圧を低減させる騒音制御手法である.能動騒音制御は,
一般的に低周波騒音において制御効果が高いとされており,受動的騒音制御で 発生するコストやスペースの問題を解決する手段として有効である.Lueg の 特許取得当時には,計算機の性能が不十分であり実現が困難であったが,近年
の DSP(Digital Signal Processor)デバイスの飛躍的な発展に伴って能動騒音制御
による騒音対策が実現されてきている.
能動騒音制御手法としては,適応フィードフォワード制御によるものが主流 である.この手法は,制御対象領域に設置した誤差マイク近傍に到達する騒音 に対して,逆位相,同振幅の制御音を誤差マイクの信号を処理して算出・出力 し,騒音と干渉させるものである.本手法は,誤差マイク位置で非常に高い制 御効果を得られるが制御領域はマイク付近に限られ,マイクから離れた位置で 増音が起こるという問題がある.
広範囲の開空間で制御効果を得るためには,多数のアクチュエータとセンサ を適切な位置に配置して,Elliott ら(2) (1987)の提案した多チャンネルの適応フ ィードフォワード制御等を用いて制御する必要がある.この手法は,制御対象 空間内に配置した複数の誤差マイク信号の2乗和を適応的に最小化する信号処 理手法であり,適切な位置に誤差マイクを配置できれば広範囲の空間で制御効 果を得ることができる.一方,誤差マイクを制御対象の空間に分布させるので はなく,制御音源を騒音源付近に配置し,騒音源からの放射音自体を低減する ことで広範囲の制御効果を得る研究も⾏われている.特に,放射音の音響パワ ーを最小化することで高い制御効果が得られることが知られており,Nelson(3)
(1987)らは,騒音源としての点音源(群)から放射される音響パワーを最小化
する制御音源の条件を騒音源の振幅と位相を用いて定式化した.また,林ら(4)
(1994)は,Nelson(3)らの手法を基本的な適応フィードフォワード制御である
LMS アルゴリズムと関連づけ,誤差マイク位置を最適化することで騒音源の 位置が既知であれば音響パワーを最小化する手法を示した.さらに,江波⼾ら
(5) (2007)は,音響パワー最小時には制御音源の放射パワーがゼロとなる現象(6)
に着目し,音源位置が未知の場合でも音響パワーを最小化する手法を提案した.
上記の手法は,騒音源付近にアクチュエータを配置することができれば,比較 的少ないアクチュエータで制御効果を得ることができるが,騒音源から離れて いるか騒音源が広範囲に分布している場合には多数のアクチュエータが必要と なる.田中ら(7) (2001)は複数の点音源を用いて平板振動から放射される音響パ ワーを最小化する手法,小林ら(8) (2002)は,振動制御と騒音制御を併用して放 射音響パワーを最小化する手法を提案している.また,複数の制御音源から放 射される波面を合成して1つの大きな平面波とすることで,広範囲の騒音を打 ち消す手法(9) (2016)もある.以上のように,開空間において広範囲の制御効果 を得ようとした場合には,比較的多数のアクチュエータとセンサを必要とする.
実際に,3 次元の自由空間内のある範囲の空間全体で 10 dBの制御効果を得る ためには,制御対象領域の境界面に波⻑の 1/2 程度の間隔でスピーカを配置す る必要があることが,伊勢(10) (2003)によって境界音場制御の原理を用いて示さ れている.
1.1.2 閉空間内の能動騒音制御
前節の開空間に関する能動騒音制御に対して,車室内等の閉空間内の騒音制 御の研究も進められている.Elliott ら(2)の手法を閉空間全体へ適用(11-14)した例 は多く提案されている.三好ら(11) (1990)は,音場の逆フィルタ処理を利用して 閉空間内の複数観測点周辺に制御領域を生成する騒音制御を実現した.Bao(12)
ら(1993)は,3 次元空間において周期音を対象とした実験を⾏い,複数の空間
内共鳴を低減する制御効果を得ている.Bai(13)ら(1998)は,ランダム騒音の作 用する直方体の3次元音響空間を想定して,マイクやスピーカの配置を実験的 に検討した.Cheer(14)ら(2015)は,自動車室内のロードノイズ低減のために,
多チャンネルのフィードフォワードとフィードバックを組み合わせたコントロ ールシステムを設計した.多チャンネルの適応制御では,適切なマイクやスピ ーカ配置によって高い効果を得られるが,多入力多出力の適応信号処理システ ムの設計が複雑で計算量が多いという問題がある.これに対して,モードセン サ・モードアクチュータ(15)の考え方を利用して複数のマイク・アクチュエータ を適切に配置することで,空間のモード形状を独立に計測制御するモーダル制 御手法(16)がある.この手法では,モードの独立性を利用して多入力多出力シス テムを複数の 1入力 1出力システムに変換するため,計算量は少なく制御系の 設計が容易である.森下ら(17), (18) (1995, 2008)は,高次モード成分を含む直方形 ダクトに対するフィードフォワード型のモーダル制御(17)や,3次元音響空間内 のモーダルフィードバック制御(18)を⾏った.Clark(19)ら(1999)はジェット機体 内,Montazeri(20)ら(2006)は電話ボックス,Cheer(21)ら(2013)は自動車室内を想 定してモーダルフィードバック制御を⾏っている.モーダル制御は,計算量は 少ないが空間内で独立なモードを計測する必要があるため,複雑な空間におい ては適切なセンサの配置位置を決定するのが難しい.
宇宙構造物等の柔軟構造物においてセンサをアクチュエータと同じ位置に配 置し速度をフィードバックすることで固有振動を低減する DVFB(22)(直接速度 フィードバック)による振動制御手法は理論的に安定性の保証された実用的な 手法としてよく知られている.能動騒音制御においてもこの特性を活かした制 御手法として,TCM(23),(24),(25)(Tight Coupled Monopole)やDRFB(26),(27),(28) (Di- rect Rate Feedback)などが提案されている.TCM(23),(24),(25)は,制御音源とマイク を同じ位置に配置して音圧の直接フィードバック制御を⾏い,スピーカ前面の 騒音を小さくする手法であり,Olson ら(23) (1953)によって基本原理が示されて
いる.また,Hong ら(24) (1987)がダクトを対象として有効性を確認し,森下ら
(25) (1995)は制御音源とセンサの配置を工夫し,制御効果の改善法を示している.
一方,Clarkら(26) (1995)によって提案されたDRFB(26),(27),(28)は,制御音源と同じ 位置に配置したマイクで計測する音圧を音源の体積速度としてフィードバック することで多くの振動モードに減衰を加える手法であり,振動系における DVFB と同一の特性を持つことが示されている.この手法では,制御音源の体 積速度を一定と仮定とする必要がるため,Lane ら(27) (1998)は,スピーカの動 特性を制御して体積速度を一定とするような制御手法を提案している.また,
鮫島ら(28) (2007)は,DRFB と有限要素法を組み合わせて最適なフィードバック
ゲインを算出する方法を示している.これらの手法は,空間の構造に減衰を加 えることと等価であるため安定性が高い一方,閉空間全体の音圧を効率的に低 下させるために多くのマイクとスピーカを空間全体に配置する必要がある.ま た,空間に構造的な減衰を付加する制御手法であるため原理的に全てのモード に減衰を付加できるが,特定のモードを大きく低減することが難しい(29).
閉空間内の騒音問題では,開空間と異なり閉空間の形状を利用することで比 較的少ないアクチュエータとセンサで空間全体の騒音を低減できる手法もある.
例えば,閉空間内を制御対象として空間全体のポテンシャルエネルギ密度の和 を最小化する,アクティブモード制御(30-32) (1987)が提案されている.この手法 では,原理的に閉空間全体のポテンシャルエネルギ密度を計測する必要がある が,現実的には有限個の評価点の位置を最適化することで同程度の制御効果が 得られることが知られている.伊勢(33),(34) (1990, 1995)はこの手法を広帯域ノイ ズに適用する実験(33)を⾏った上,境界要素法を利用した制御効果の評価手法
(34)を提案しており,少ないマイクとスピーカを適切に配置することで多くのモ ードを低減できることを示した.江波⼾ら(35) (2002)は,開空間に関する検討(5) と同様に誤差マイク位置の最適化に基づく LMS アルゴリズムを用いた音響パ ワーの最小化手法を提案している.また,ポテンシャルエネルギ密度を最小化 する手法では,音響モード関数の節に評価点を置いた場合に制御効果が悪化す る問題があるが,ポテンシャルエネルギ密度と運動エネルギ密度の和を最小化 することで評価点の配置制限を改善可能であり,1次元音響空間(36)や3次元音
響空間(37) (38)に適用されている.貝塚ら(39) (2006)は,さらに評価関数を一般化
して,音圧の各階勾配の二乗和を最小化する手法を提案した.この手法では,
1つの評価点の騒音低減が閉空間全体の騒音低減となることが示されている.
これらの手法は,比較的少数のマイクおよびスピーカで閉空間全体の騒音を低 減することができる特殊な制御手法であるが,既知の固有モードを有する単純 な空間にしか適用することができないという問題がある.特に,運動エネルギ 密度を評価関数に含める場合には,音圧勾配の計測が必要となる.また,振動 系と音響空間の連成系を対象として,音響空間のポテンシャルエネルギを最小 化する方法(40)や,運動エネルギとポテンシャルエネルギを同時に最小化する方 法(41)も提案されているが,実現のためには多くのセンサを必要とする.
田中ら(42) (1998)は音響空間のモードを同じ特性を持つグループに分けて制御
することで,DVFB の特性を保持してより大きな制御効果を得ることのできる クラスタ・フィードフォワード制御を提案しており,貝塚ら(43),(44) (2006)は音 響空間に適用した場合の制御効果を数値的に検討している.岩本ら(45) (2011)は,
音響エネルギ密度と関連づけたフィードバック型のクラスタ制御を DRFB制御 の拡張系として定式化し,1 次元音響空間において準最適フィードバック制御 と同レベルの制御効果が得られることを示した.この手法では,空間全体で高 い制御効果を得るためにはモードの対称性を利用してマイクとスピーカを空間 に配置する必要があるため,非対称な音響空間に適用することが困難である.
空間内の共振現象を抑制するのではなく騒音源からの進⾏波を制御音源で相 殺することを目的とした波動制御手法(46)は,柔軟はり(47)や音響管等の1次元
空間(48) (49)において高い制御効果を得られることが知られている.この波動制
御手法を3次元音響空間に適用した例(50) (51)も報告されている.波動制御では,
波動入力の算出のために次数の高いフィルタを作成する必要があるほか,3次 元空間では平面波作成のために進⾏波の進⾏方向の断面の大きさに応じて複数 の制御音源が必要となる.
以上より,簡易的な空間を対象とした特別な場合以外では,多くのアクチュ エータとマイクを分散配置しなければ高い効果を得ることができず,その配置 手法に関しては実験的に検討する必要がある.実際,今野ら(52) (2009)は,適応 フィードフォワード制御を用いて自動車内のこもり音制御を実用化しているが,
車種ごとの車室内形状に合わせて経験的にマイクとスピーカの配置を定めてい る.Oh(53) (2002)ら,高松ら(54) (2015)は,多数のマイクを用いて制御効果が高 くなる配置を実験的に検討している.また,佐野ら(55) (2000),井上ら(56)
(2003)は,コスト削減を優先したマイク・スピーカ配置について制御効果を検
討している.
1.1.3 モデルベースの能動騒音制御
前節の手法は空間やセンサ・アクチュエータのモデル化を必要とせず,セン サの信号のみを用いて制御入力を算出する.したがって,音響空間全体で制御 効果を得るためには,空間全体に関連する評価関数を計測するために,多くの センサが必要である.一方,音響空間をシステム方程式としてモデル化すれば 古典制御理論や現代制御理論(52)を用いて取り扱うことができ,推定器を利用し て状態フィードバックを⾏う場合には,モデル化した音響空間全領域の騒音制 御が可能になると考えられる.また,センサやアクチュエータの配置の検討な どもモデルを用いて⾏うことが可能である(57) (58).この方法は実際に柔軟構造 物の振動制御(59)では従来よく用いられているが,モデルベース制御を用いた騒 音制御の文献は適応信号処理手法と比較すると少ない.モデルベースの制御に おいて,騒音からセンサまでの伝達経路のモデル化を利用した制御手法(60~67) がいくつか提案されている.範ら(60),(61) (1996)は,ダクト放射音に対してスピ ーカとマイクの動特性を考慮した上,H∞制御を適用した.Bai ら(62) (1998)は,
ダクト出口の周期音に対して古典制御理論と内部モデル原理に基づく定式化を
⾏ったコントローラを設計した.佐野ら(63) (1999)は,車室内のマイク位置にお ける制御効果を数値計算で確認した.下嶋ら(64) (1999)は,実験モード解析を用 いて音源やセンサの電気的特性を含めてモデル化し,混合H2/H∞制御を⾏う 方法を提案している. Linら(65) (2000)は,内部モデル原理に基づく制御を状態 空間モデルで⾏った.Potaら(66) (2001)は,ダクトの波動方程式とスピーカの方 程式から,ダクトの消音を⾏うフィードバック制御則を導出した.しかしなが ら,以上の文献では,騒音源からマイクまでの伝達関数を用いたモデル化およ び制御系設計を⾏っており空間全体の制御を目的としていない.
閉空間全体を制御対象としたモデルベースの研究は比較的少ない(67~76).Bai
ら(67) (1994)は,最適レギュレータとカルマンフィルタを組み合わせる LQG 制
御をダクトと直方体空間に適用しているが,多くのスピーカとマイクを使用し ており,制御効果も高くない.Potaら(68) (2003)は,2次元の⻑方形音響空間に 対して変動パラメータを考慮する Minimax LQG 制御を⾏っているが,制御効 果の得られる周波数帯域は非常に狭く,広帯域の制御効果が低い.鮫島ら(69)
(2002)は,有限要素法を用いて矩形音響空間をモデル化し,H∞制御理論を用
いて音響空間全体の能動騒音制御を⾏う手法を提案し,数値計算結果と実験結 果の比較を⾏った.その結果,モデル化においてスピーカの動特性を無視して
いるため制御効果が低下し,数値計算結果と実験結果の間に誤差が生じると考 察している.また,H∞制御の設計の複雑さを改善するために,スライディン グモード制御を適用した場合(70)や,空間内の温度変化等のパラメータ変動に対 応するためにゲインスケジューリング制御を適用した場合(71)について検討が⾏
われているが,有効性の確認は数値計算による検討にとどまっている.
Bisnette ら(72) (2006)は,スピーカの動特性を含むモデル化を利用して1次元音
響空間内でPPF (Positive Position Feedback)によるアクティブ吸音制御を⾏った が,複数モードの制御実験では各共振ピークで平均 3 dB 程度の制御効果しか 得られていない.Loiseau ら(73) (2017)は,直方体空間を部分空間同定法を利用 してモデル化し,H2/LQG 制御を適用した場合に使用するべき適切なスピーカ とマイクの数と制御法を検討した.しかしながら,マイクとスピーカの配置は 最適化されていない.以上の検討は単純な直方体空間に限られており,理論的 な制御限界やマイクとスピーカの最適な配置方法などが検討されていない.
音響空間と弾性板が連成するような,より一般的なシステムにおいてもいく つか検討が⾏われている.Song ら(74) (2003)は,自動車を模した音響空間と振 動の連成系に対して LQG 制御⾏った.しかしながら,音響空間の制御ではな く振動系の制御を目的としており,内部の音圧が評価されていない.Fang ら
(75) (2004)とLiuら(76) (2014)は,3次元⻑方形空間の1面が振動板になっている
空間に対して Minimax LQG 制御⾏った.以上の文献でも,センサ・アクチュ エータの適切な配置指標等は示されておらず,制御効果もピークにわずかな減 衰を付加する程度で不十分である.
1.2 本研究の目的
1.2.1 これまでの研究の問題点
前節までに述べたように,多数の騒音制御手法の検討が⾏われてきた.閉 空間に騒音制御手法を適用する場合,マルチチャンネルの能動騒音制御システ
ム(11-14)は,騒音源から複数の誤差マイク位置までの伝達経路のフィルタを適応
的に算出する必要があり,煩雑なシステムとなる.閉空間のモードを用いるモ ーダル制御(16-21)は,簡単な制御システムで実現可能であるが,モード関数が既 知である簡単な空間に限られることと,制御対象モードと同数のセンサとアク チュエータが必要となる問題がある.TCM(23),(24),(25) や DRFB(26),(27),(28)は,セン サをアクチュエータと同じ位置に配置してフィードバック制御することで,音 響空間に減衰を付加する手法である.この手法は,高い安定性を持つ一方で,
制御効果があまり高くない.アクティブモード制御(30-35)は,閉空間のモード形 状を利用して,音響ポテンシャルエネルギを最小化する制御手法である.クラ
スタ制御(42-45)は,センサ・アクチュエータを対称に配置することで,モード群
ごとに独立な制御を⾏う手法であり,DRFB 制御の拡張系としての特徴を持つ.
アクティブモード制御とクラスタ制御は,閉空間の形状を利用することで少な いセンサ・アクチュエータで高い制御効果を得られるが,適用できる空間が簡 単な形状に限られており複雑な形状の空間に適用するのが難しい.モデルベー スの能動騒音制御(60~76)では,騒音からセンサまでの伝達経路をモデル化する ことで,センサ位置で非常に良い制御効果を得る場合がある.一方,空間全体 の騒音制御を対象とした研究では,Minimax LQG 制御やH∞等のロバスト性の 高い手法が用いられることが多い.これらの手法は,スピルオーバの抑制効果 が高い一方で,制御効果が保守的となる.そのため,広帯域の周波数領域にお いて高い制御効果を得られた文献は見当たらず,センサ・アクチュエータの配 置指標も明確でない.これらの問題より,できるだけ少ないセンサとアクチュ エータで制御が実現でき,複雑な形状の空間にも適用できるような効果の高い 制御手法の確立が望まれている.
1.2.2 本研究の目的
以上の問題を踏まえて,本研究では,なるべく少数のマイクとスピーカを用 いた複雑な形状の閉空間全体の騒音制御の確立を目的とする.そのために,制 御に用いる音響機器の動特性を含めた音響空間の解析モデルを作成し,複雑な 閉空間に対して状態フィードバックを用いた空間全体の制御手法を確立する.
鮫島ら(70)は,比較的広い3次元空間で,スピーカの動特性を考慮しない解析 と実験の比較を⾏い,音源の動特性を考慮していないため解析結果と実験結果 に誤差が生じているとの考察を示しており,スピーカの動特性はできるだけ考 慮するべきである.そこで,質量,結合線形ばね,結合減衰,基礎支持減衰か ら構成される多自由度線形集中系モデル(77),(78)で音響空間をモデル化し,動電 形スピーカを 1自由度のばね−減衰−質点系としてモデル化することで,スピ ーカと音響空間の連成系の集中系モデルを作成する.さらに,連成モデルを用 いてモデルベースの制御系を設計し,状態フィードバックに基づく音響空間全 体の能動騒音制御を⾏う.このとき,モード解析を用いて自由度を縮小するが,
音響空間を集中系でモデル化することで,連成系の質量⾏列,剛性⾏列が対称 になるためモード解析が容易となる.有限要素法を用いる場合も本制御システ ムの構築は可能であるが,モード解析の際に左固有値および右固有値(79)が必要 となる.また,集中系モデルでは,音響領域,スピーカ領域に質点を配置する だけで境界条件を満たし,連成解析の取り扱いが容易になるため,本研究では,
音響空間のモデル化に集中系モデルを用いる.
複雑な形状の音響空間に対する制御の前段階として,1次元音響空間と⻑方 形の 2次元音響空間に対するモデルベース制御手法を提案する.そして,騒音 源と制御音源を対象配置した場合の制御限界を検討する.また,制御実験を⾏
い,提案手法の制御効果を確認する.次に,複雑な形状の空間に適用するため,
制御対象のモードを振幅・位相で分類し,各モード群ごとに制御音源を配置す る制御手法を提案する.さらに,複雑な 2次元音響空間の制御シミュレーショ ンによって制御効果の有効性を確認する.
1.3 本論文の構成
本論文は以下の5章より構成されている.
第 1章では,研究の背景として能動騒音制御に関する研究の歴史,過去の研 究について紹介し,これまでの研究の問題点と本研究の目的についてまとめて いる.
第 2章では,モデルベース制御に用いるための1次元音響空間および2次元 音響空間とスピーカの連成モデルを作成する.また,音響測定実験を⾏い,実 験結果と数値解析結果を比較することで連成モデルの妥当性を検証する.
第 3章では,2章で作成した連成モデルを用いてモデルベースの能動騒音制 御手法の設計を⾏う.そして,音響空間に対して騒音源と制御音源を対称に配 置した場合のモードの位相関係に着目することで制御限界を検証する.また,
制御実験を⾏い,提案した制御手法の制御効果を確認する.
第 4章では,複雑な形状の空間に適用するために,騒音源と制御音源をを非 対称に配置した場合の制御限界について検証する.その結果,位相だけなく,
振幅の違いも制御効果に影響を与えることを示す.また,位相と振幅関係の異 なるモード群を低干渉化することで制御効果を向上できる手法を提案する.そ して,制御シミュレーションを⾏い,提案した手法の制御効果を確認する.
第5章では,本論文で得られた結果を総括する.
第 2 章 音響空間とスピーカの連成モデル
本章では,モデルベースの状態フォードバック系の構成に必要となる,1 次 元と 2次元の音響空間,動電形スピーカのモデル化およびそれらの連成系のモ デル化について説明する.さらに,スピーカ単体の振動測定実験および音響空 間内の音響測定実験を行い,実験結果と解析結果を比較することでモデル化の 妥当性を確認する.
2.1 スピーカ・マイクのモデル化
本節では,制御に用いるアクチュエータ・センサのモデル化を行う.ただし,
アクチュエータには動電形スピーカ,マイクにはコンデンサマイクを使用する ことを前提とする.
図 2.1(a)に示すような動電形スピーカのモデル化を行う.動電形スピーカは,
1000 Hz 以下程度の低周波数領域で使用する場合,スピーカの振動板(図
2.1(a)のコーン部分)全体が一体となって振動するため,スピーカを等価直径
Ds(断面積As)の円板の 1 自由度振動系として考えることができる.このと き,音響空間の音圧の影響を受けるスピーカの動的挙動を考える.スピーカの 周波数領域における動作方程式は,時間領域で表現すると次式のようになる(81).
s s s s s a p s
s s s s
s s p s
m c k f K i
L i r i e K
ξ ξ ξ
ξ
+ + = +
+ = −
ɺɺ ɺ
ɺ
ɺ (2.1)
ただし,msは振動板の質量,csはスピーカの機械的な減衰,ks は振動板支持 の剛性,Kpはパワー係数,rsはボイスコイルの抵抗と内部抵抗の和,Lsはボ イスコイルのインダクタンスである.また,ξsはスピーカの振動板の変位,is はボイスコイルに流れる電流,faは振動板が空気から受ける力,esはボイスコ イルに与える電圧であり,これらは時間の関数である.式(2.1)の第 1 式は,空 気から受ける力とボイスコイル内の電流により発生する力が作用するときの振 動板の運動方程式を示し,第 2式は,ボイスコイルへの入力電圧と振動板の振 動により発生する起電力を考慮した電気回路の式である.ここで,スピーカを 低周波数領域で用いると仮定すると,時定数τ=Ls /rsが非常に小さいことから
式(2.1)の第2式の左辺第1項を省略することが可能となり,式(2.1)を次のよう
Cone Edge
Damper
Magnet Voice coil
fa
ks cs Ks ms
ξs
(a) 断面図 (b) 等価質量モデル 図2.1 動電形スピーカ
に簡略化できる.
ms sξɺɺ +cs sξɺ +ks sξ = +fa K es s (2.2)
= /
s p s
K K r は電圧を力に変換する係数であり,cs = +cs K Kp sである.式(2.2) は,スピーカを図 2.1(b)のように質点,減衰,ばね,コイルによる駆動力で 構成される1自由度系としてモデル化したことに相当する.
また,センサとしてコンデンサマイクロフォンを使用する.コンデンサマイ クロフォンは,1000 Hz 以下の低周波数においては位相差のない特性を持つこ とが知られている(81).従って,計測する音圧dpとマイクロフォンの出力電圧 emの間に次式が成り立つ.
dp T e= m m (2.3)
[V/Pa]
Tm は,マイクの感度係数であり仕様書などに記載されている値を用いる.
2.2 1次元音響空間とスピーカの連成系モデル
本節では,図 2.2に示すような円筒管内の 1次元音響空間と円筒管両端に設 置したスピーカのモデルを作成する.左端のスピーカを騒音源,右端のスピー カを制御用のアクチュエータとする.円筒管内の音響空間とスピーカの連成系 を,図 2.3 に示すような質量,線形結合ばね,結合減衰,基礎支持減衰からな る線形集中系モデル化する.
2.2.1 1次元音響空間の集中系モデル(78)
図 2.3 に示す⻑さL,直径D(断面積A)の円筒管内の音響空間を,Na個 の⻑さlの要素に等分割する.質点は断面の中心に配置し,円筒管の軸方向に のみ変位するものとする.各質点の変位をxi,要素iの圧力変動量(音圧)を
Source
Noise Source
Control Source Controller
Microphone
D
L
図2.2 1次元音響空間における制御システム
Acoustic Field Speaker
Speaker
Noise signal
Vibration Board of speaker Control signal
Vibration Board of speaker
Element Node
Element Element Element
1
Node
Element
1
es es2
i
i 1 i−
1
i− i+1
1
ks 1
cs
1
Ks 1 L
fa 1
R
fa
x1
m cb
m cb
1
xi−
k
cb
m cc
xi
cb
m
l
L
faN faNR
2
ks 2
cs
2
Ks
Na
ξsn ξsc
Na
x
図2.3 1次元連成系おける集中系モデル化
dpiとする.平衡状態における圧力はp0,密度はρ0,要素体積はV0 =Alである.
質点の質量mは,次式で表される.
m=ρ0Al (2.4)
各要素において空気の変形の前後で断熱過程を仮定すると,要素体積Viと音圧 dpiの間に次式が成り立つ.
p0
( )
Al γ =(
p0+dpi)(
V0+dVi)
iγ (2.5)ここで,γは比熱比,dViは質点が移動したときの要素iの体積変動量である.
式(2.5)を音圧dpiについて解き,dViに関して線形化すると,
0
0
i = i
dp p VγdV
(2.6) また,質点の移動に伴う体積の変動量dViは次式で表せる.
dVi =A x( i−xi−1) (2.7)
式(2.7)を式(2.6)に代入すると,質点変位と音圧の関係が次式で表せる.
0
(
1)
0
− −
i = i i
dp p x x
V A
γ (2.8)
式(2.8)から,要素iのばね要素から作用する復元力fikおよび結合ばね係数kは
(
1)
0
−
=
= − −
=
i i i
k i
A
f Adp k x x k p
l
γ (2.9)
となる.また,法線応力dσから結合減衰係数を算出する.1次元空間における 法線応力dσは次式で与えられる.
u dσ= −µ′∂x
∂ (2.10)
ここで,µ′は体積粘性係数,uはx 方向の流速である.式(2.10)を各質点の速 度を用いて離散化すると,
i j, xi xi 1 dσ = −µ′ ɺ −lɺ−
(2.11) となる.式(2.11)に断面積Aを乗じたものが結合減衰から作用する力であるた め,結合減衰係数ccを次のように表す.
cc = cA
α l (2.12)
αcは体積粘性係数に対応するが,正確な物性値が存在しないため実験的に同 定する.また,基礎減衰係数cbから作用する力は,要素の側面積πDlの壁面で 作用するせん断力に比例するものと考え,基礎減衰係数cbを次のように表す.
cb =αbDl (2.13)
比例定数αbは実験的に同定する.以上より,集中系モデルの運動方程式は次 式のようになる.
i
(
2 i i 1 i 1)
c(
2 i i 1 i 1)
bmxɺɺ = −k x −x − −x + −c xɺ −xɺ− −xɺ+ −c xɺi (2.14)
2.2.2 スピーカと音響空間の連成部のモデル
本節では,音響空間とスピーカの連成部のモデル化を行う.いま,図 2.4 に 示す要素1において左端のスピーカを円板とみなしたときの等価断面積Asが
Vibration board of speaker
Mass of air (Mass point 1)
A
sdp
1d σ
1x
1−
A
l
ξsn図2.4 1次元音響空間とスピーカの連成部のモデル化
円筒管の断面積Aよりも小さい場合を考える.スピーカの振動板の変位をξsn, 隣り合う空気の質点 1の変位をx1とする.断熱過程を仮定すると連成部(要素 1)における音圧dp1および減衰による法線応力dσ1は次式で表せる.
1 0
(
Ax1 s sn)
Al
dp p γ A
= − − ξ (2.15)
1
(
1)
c
Ax s sn
d A
l A
σ = −α − ξ (2.16)
音圧dp1と減衰による法線応力dσ1によってスピーカに作用する力 L1
fa ,質点1 に作用する力 R1
fa は次式のようになる.
( )
( )
1 1
1
1 1
1
+
=
−
= − +
R L
a
a d As
f d
f d
A p
dp σ σ
(2.17) 右端の連成部(要素Na)についても同様に取り扱う.集中系モデルは,図2.4 のように音響領域,スピーカ領域に質点を配置するだけで連成部の境界条件を 満たすため,連成解析の取り扱いが容易になる.
2.2.3 連成系の運動方程式
1次元音響空間とスピーカの連成系の運動方程式は次式で表せる.
2 2
1 1
, , ,
,
a
a
a a
as as
aa N aa aa
sa ss sa ss
N ss
N N
s s
d u
×
×
× ×
= =
+ + = +
=
=
=
Mx Cx Kx G H M
M C C K K
C K
C C K
G
H
K
H G
M 0 0
0 0
ɺɺ ɺ
(2.18)
なお,式(2.18)における連成系の変位ベクトルは次のように定義している.
[ ]
T T T 1
T 2 1 T 1
, 1 a
a
N
a s
N
a N
s ξsn ξsc x x
×
×
×
∈
∈
=
= = ∈
x x x
x x
ℝ
ℝ ⋯ ℝ
(2.19)
ここで,N (=Na +2)は連成系の自由度である.また,式(2.18)において
, ,
a a a a a a
N N N N N N
aa∈ × aa∈ × aa∈ ×
M ℝ C ℝ K ℝ はそれぞれ,音響空間の質量行列,減 衰行列,剛性行列,Mss∈ℝ2 2× ,Css∈ℝ2 2× ,Kss∈ℝ2 2× はスピーカの質量行列,
減 衰 行 列 , 剛 性 行 列 で あ る . ま た ,Cas∈ℝNa×2 ,Csa∈ℝ2×Na 及 び Kas
a 2 N ×
∈ℝ ,Ksa∈ℝ2×Naは,音響空間とスピーカの間の連成部の行列を表す.また,
2 1, 2 1
s∈ × s∈ ×
G ℝ H ℝ は,騒音源としてスピーカに入力する信号d =K es1 s1および
制御入力u=K es2 s2の作用する位置を表す.このモデル化は有限要素法を用い
ても可能ではあるが,集中系モデルは連成部の行列が対称 (CasT =Csa ,
T as = sa
K K )であるため,連成系の各行列M, C, K が対称行列となり,各行 列が非対称となる有限要素法と比較して計算時間が短縮できる.さらには,左 固有ベクトルを用いる有限要素法よりモード解析が容易となる.
2.3 2 次元音響空間とスピーカの連成系モデル
図 2.5 に示す各辺の⻑さがLx×Lyで厚さがhの直方体空間(h≪L Lx, y)の 一面に騒音源と入力源の 2 つのスピーカを取り付けた系を考える.壁面は剛 体とし,音響空間とスピーカの連成系を集中系にモデル化する.
2.3.1 2次元音響空間の集中系モデル(79)
本節では,2次元音響空間を集中系でモデル化する.図 2.6のように,音響 空間を辺の⻑さlx×ly の⻑方形要素に分割し,x y, 方向の要素分割数を
x, y
N N とおく.質点は各辺の中心に配置し,左右の辺に配置した質点はx方 向変位xi j, を持ち,上下に配置した質点はy方向変位yi j, を持つ.要素[ , ]i j の 圧力変動量(音圧)はdpi j, とする.平衡状態における要素体積はV0 =l l hx y で ある.各質点のx y, 方向の運動に対する質量mx, myは,図 2.7 の斜線部の空 気の質量を考慮して次式で表される.
mx =my =ρ0hl lx y (2.20)
Control Noise
Microphone
speaker speaker
図2.5 制御対象領域 図2.6 格子分割
図2.7 質量分配 図2.8 要素の体積変動
各要素において空気の変形の前後で断熱過程を仮定すると,要素体積と音圧
i j,
dp の間に式(2.5)が成り立ち,線形化して式(2.6)が成り立つものとする.要
素[ , ]i j において,質点が図 2.8 のように移動すると仮定すると,体積変化量
i j,
dV は各質点の変位xi, yiを用いて次のようになる.
dVi j, =h l
{
y(
xi j, −xi−1,j) (
+lx yi j, −yi j, −1) }
(2.21)式(2.21)を式(2.6)に代入すると,次式を得る.
, 0
{ (
, 1,) (
, , 1) }
0
− −
= − − + −
i j y i j i j x i j i j
p h l x l y y
d x
p Vγ
(2.22) 次に,空気が膨張・収縮する際の体積変化速度に比例する法線応力dσi j, を
減衰としてモデル化する.2 次元空間における法線応力dσは次式で与えられ る.
∂ ∂
= − ′∂ +∂ u v
dσ µ x y (2.23)


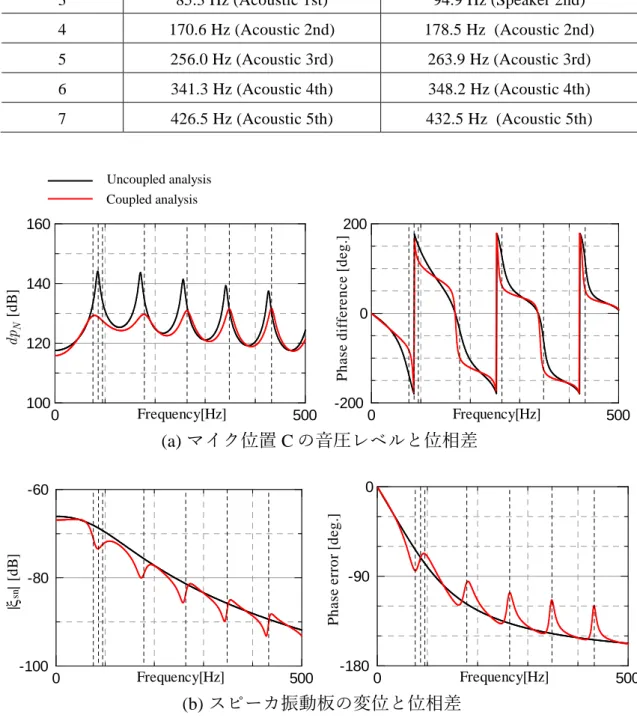
![図 2.16 2 次元音響空間とスピーカ連成系の音圧の周波数応答 が最小になるように値を定めている. 図 2.16 はマイク位置における音圧の周波数応答を示している.⾚線は解析 結果,⿊線は実験結果を示し,図 2.16 (a) は音圧レベル,図 2.16 (b) は騒音源の スピーカに与える電圧 d = sin Ω t [V] とマイクの音圧との間の位相差を表す.図 2.16 の結果より,マイク位置における解析結果と実験結果がよく一致している ことから提案した連成系モデルが妥当といえる. 2.5 まとめ](https://thumb-ap.123doks.com/thumbv2/123deta/9916318.1918612/38.892.149.758.158.422/スピーカマイクおける示し図レベルスピーカ与えるマイク表す図.webp)
![表 3.1 多段解法の段数と打切り誤差 β z α z 0 α z 1 α z 2 error 1 1 ― ― o T ( )s2 2 3/2 − 1 / 2 ― o T ( )s3 3 23/12 − 16 / 12 5/12 o T ( )s3 となる.式 (3.10) におけるディジタル制御則は,連続時間領域で制御入力 u t ( ) , 出力 y o ( )t , 騒音信号 d t ( ) が得られているものとして,常微分方程式の多段解法 に基づく手法により, 1 0[ ]](https://thumb-ap.123doks.com/thumbv2/123deta/9916318.1918612/44.892.276.615.149.292/多段解法段数打切りとなるにおけるディジタルとして基づくにより.webp)
![表 3.2 簡易系の固有振動数 Mode order i Natural Frequency [Hz]](https://thumb-ap.123doks.com/thumbv2/123deta/9916318.1918612/46.892.136.758.315.1003/表32簡易系の固有振動数ModeorderiNaturalFrequencyHz.webp)

![図 3.24 1 次元音響空間の制御実験における極配置設計 表 3.4 1次元音響空間の制御実験における設計パラメータ R 10 − 5 I 2 2 × Q I 2 n × 2 n [kHz] T 20 T d [kHz] 1.1 β z 1 極の移動量をより大きくできれば制御効果が向上するが,本実験で使用する DSP では移動量をこれ以上大きくすると安定的に制御を行うことができていな い.図 3.23(a) は, 200 Hz から 800 Hz までの奇数次モードを制御する場合 (Ca](https://thumb-ap.123doks.com/thumbv2/123deta/9916318.1918612/72.892.130.745.167.469/おける響空間おけるパラメータ大きくできれ本実験移動量大きく.webp)
