速度・重量の観測器による誤りの可視化を目的とした
力学学習支援システムの開発と評価
Development and Evaluation of a Learning Support System with Error-Based
Simulation by means of Speed and Weight Measurement in Physics Expressions
植野 和
1東本 崇仁
1堀口 知也
2平嶋 宗
3Urara UENO
1, Takahito TOMOTO
1, Tomoya HORIGUCHI
2, and Tsukasa HIRASHIMA
31
東京工芸大学工学部コンピュータ応用学科
1
Department of Applied Computer Science, Faculty of Engineering, Tokyo Polytechnic University
2
神戸大学大学院海事科学研究科
2
Graduate School of Maritime Sciences, Kobe University
3
広島大学大学院工学研究科
3
Graduate School of Engineering, Hiroshima University
Abstract: In this paper, we developed the measurement of speed and weight to Error-Based Simulation for visualization.
For this system, some learners can not be aware of errors, when the resultant force is equal to the correct answer and the obtained simulations direction of motion is equal to the correct simulation. From these above, we generate simulation with measurement for error awareness of learners.
1 はじめに
初等力学の学習において,学習者による試行錯誤 は現象に対する理解を深めるために有効である.そ のため,中学理科における力学の学習では,実験に よる試行錯誤を通した学習が行われており,その観 察を通して知識が習得されることが多い.しかし, 学習者が誤概念を有する場合に現象からの学習を行 うには,学習者の誤概念に対応した現象を生成する 必要があり,また生成された現象に対して学習者が 自身の持つ誤概念と対応していることを理解する必 要がある.これらは通常の実験を通した学習のみで は難しく,そのため誤概念の修正は容易ではない. このような背景から,学習者が入力した誤概念をも とにふるまいを生成できるシステムとして,Error-Based Simulation(EBS)が用いられている.EBS は,ある現象に対する学習者の概念の記述をもとに した現象を生成し,記述された概念に誤りがある場 合には学習者の理解する現象と異なる不自然な現象 がシミュレートされることで,学習者が自身の誤り に気づくことのできるシステムとなっている.中学 理科の力学を対象としたEBS は,現象に対する力な どの概念を作図させる問題を出題し,学習者の入力 をもとにしたシミュレーションを行う.学習者が誤 答を入力した場合に生成される不自然なシミュレー ションを反例として提示されることで,学習者が自 身の作図を振り返るきっかけとなり,自発的な修正 を促すことが可能となる. しかし,力をもとにしたふるまいを示すEBS にお いては,物体が静止している系において正しい力と 学習者が誤って解答した力の合力が等しい場合に, 正解と同じシミュレーション結果を生成してしまう といった問題点がある.そのため,新たに正解との 違いをシミュレーション上で示せるような重量を示 す観測器が必要であると考える.また,物体が運動 している系においては,学習者の解答した力に対し て正しいふるまいと同じ方向への運動が生成された 場合,速度や加速度の状態の違いを理解することは 困難であると考えられる.そのため,動きに対する 速度を示す観測器が必要であると考える.よって本 稿では上記の2 点の観測機の導入について報告する. 本研究では,上記のような例に対して,観測器を シミュレーションとともに示すことで,学習者によ る理解を促進することを目指す.また,観測器を追 加したEBS について,従来の EBS との比較実験を 人工知能学会研究会資料 SIG-ALST-B509-13行い,テスト結果およびアンケートについて評価を 行った.
2 Error-Based Simulation
本章では,力の作図問題を対象としたEBS につい て,システムの概要を説明し,シミュレーションの みで誤りを観察することが困難と考えられる事例に ついて具体的に説明する.2.1 先行研究
力の作図問題を対象としたEBS においては,物体 の存在する現象が問題として学習者に与えられ,学 習者は現象の中で物体が受ける力について矢印を用 いて入力する.システムは学習者の入力した力に対 応するシミュレーションを生成し,学習者の入力し た力に誤りがなければ正しい現象が生成するが,誤 りがある場合には,間違いをもとにした不自然な現 象を生成する.たとえば,床の上で静止した物体に 働く力を記入する問題の場合,物体に対して働く力 は下向きの重力と,重力に等しい上向きの垂直抗力 であるが,図1(a)のように学習者が重力のみを作図 した場合,図1(b)のように物体が床を貫通して落下 するシミュレーションが生成される. 先行研究において今井らは,中学生に対して静止 系の課題を扱う力学 EBS を用いた授業実践を行い, 学習者自らがEBS を通して運動の第三法則にかかわ る知識の発見的な獲得を行い,また獲得した知識の 維持を行うことが可能であると述べている[1].また, 篠原らと山田らは,運動系の課題を扱うEBS を作成 し,授業実践によって効果の検証を行った [2][3].し かし,これらの実践利用においては,ふるまいのみ での誤りの可視化だけでは正解との違いを示せない 事例や,違いを観測することが難しい事例があるこ とが示されている. (a) 誤答例 (b) 生成シミュレーション 図 1 作図問題と対応する Error-Based Simulation2.2 可視化困難な誤り
ふるまいによる可視化を行う力学EBS を用いた場 合に,学習者がシミュレーションのみで誤りを理解 することが難しいと考えられる例を,静止系および 運動系のそれぞれの誤答例を用いて説明する. 2.2.1 合力が等しい誤答の例 水平な床の上で2 個の物体が積み上げられた状態 で静止している問題において,誤った解答が静止し たシミュレーションを生成する学習者の力の誤答を 図2(a)に示す.この問題の正答は図 2(b)に示すよう に,物体a に重力とそれを支える物体 b からの垂直 抗力が働き,物体b に重力と上に乗った物体 a から 押される力,およびそれらを支える床からの垂直抗 力がはたらく.これに対して誤答例では,物体b に 働く力から物体a に押される力が欠落し,対応する 垂直抗力も小さくなっている.この誤答の入力をも とにシミュレーションを生成したとき,正しい現象 と同じく静止したシミュレーションが生成される. この例のように,静止系において物体の力のつり あいが取れた誤答を入力すると,記入された力に不 足があっても静止したシミュレーションを生成する ため,この誤りに対してシミュレーションを通した 可視化を行うことはできない. この2 物体の問題に対する学習者の解答を,EBS の挙動で分類したものを図3 に示す.この問題では, 静止したシミュレーションを生成する誤答において 誤りを可視化できないこととなる. (a) 誤答例 (b) 正答例 図 2 2 物体の積み上げ問題の解答例 図 3 シミュレーション結果による解答分類 水平面上で静止するブロックに 働く全ての力を作図してください 物体が静止 学習者の解答 ふるまいによる 可視化が可能 Yes 力が正しい 従来 EBS で 可視化できない 正しい解答 Yes No No 物体 a 物体 b 物体 a 物体 b2.2.2 運動に定性差のない誤答の例 氷の上をスケート選手が右向きに等速で滑るとき に選手にかかる力を解答させる問題において,学習 者の誤答から生成されるシミュレーションが正しい シミュレーションと加速度の違いのみを示すもので, 学習者が誤りを認識することが難しいと考えられる 誤答例について,図4(a)に示す.摩擦力および空気 抵抗は無視できることが明記されている.この問題 の正答は図4(b)に示すように,スケート選手が重力 と垂直抗力を受け,地面と水平方向には力を受けな い.図4(a)で示した誤答例は,右向きに速度が存在 するために右向きに力が働いていると記入された内 容である.この誤答から生成されるシミュレーショ ンは等加速度運動となるが,これは等速度運動と同 じく直線上を同一の方向に移動する.シミュレーシ ョン等において,ある対象が等速度運動の要件を満 たしているかどうかを対象の動きのみから判断する ことは,学習者にとって困難であると考えられる. 堀口らは,力学EBS を対象として,EBS による 誤りの可視化を学習者が正しい現象との差異として 理解することが可能であるかを,現象におけるパラ メータおよびパラメータの変化率での定性値(+,0, -)を用いて誤りの可視化条件として説明している[4]. ここでは,EBS の生成するふるまいと正しい現象の オブジェクトの動きに定性的な差異が存在する場合 を可視化条件1 とし,可視化条件 1 を満たす場合に はふるまいを EBS でそのまま提示することで誤り の気づきに繋がるとしている.また,EBS による可 視化と正しい現象のオブジェクトの変化率のパラメ ータの定性値が異なる場合を可視化条件2 としてお り,この場合はEBS での提示に工夫が必要である. 図4 では,動きの変化率である加速度に着目した 場合,その定性値は正答においては0 であるが,誤 答においては正であり,可視化条件2 を満たすこと がわかる.しかし,正答と誤答の速度は定性値がい ずれも正であるため,可視化条件1 は満たしていな い.このような状況は,EBS が生成したふるまいか ら誤りに気づくことが難しい状況であるといえる. 以上をふまえて,図4 の問題設定に対する学習者 の解答の分類を図5 に示す.この問題では,正しい ふるまいで運動しない(定性値が 0)上下方向にお いて,上昇する(定性値が+)場合や,落下する(定 性値が-)ような誤りについては動きの差を EBS で 観察することが容易である.一方で,正答に動きの ある方向(定性値が+)においては,誤答をもとにし たふるまいも同じ方向に運動する(定性値が+)場合 において,誤りに気づくためには速度の変化である 加速度の定性差を理解する必要があり,誤りに気づ きづらいということになる. (a) 誤答例 (b) 正答例 図4 スケート選手問題の解答例 図5 シミュレーション結果による解答分類
3 観測器を用いた EBS の拡張
本章では,2.2 節で説明した可視化の困難な誤りに 対する可視化の手段として,EBS で速度や重量に対 応する観測機を導入する手法について提案する.3.1 重量観測器の導入
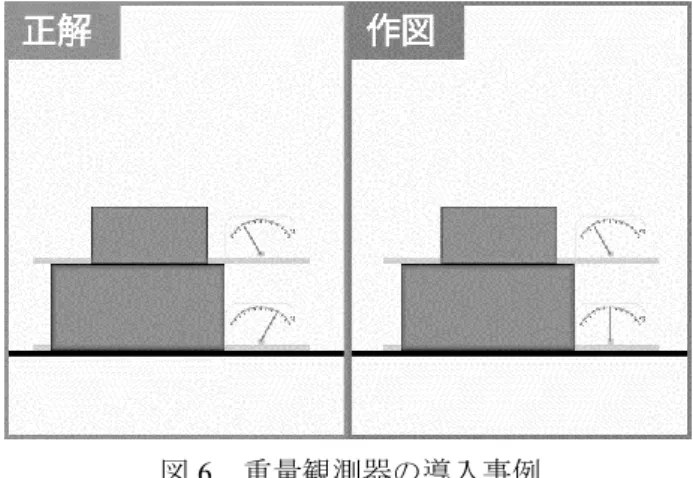
2.2.1 で述べたように,合力が正答と等しい誤答に 対して,誤った運動を生成することはできない.そ こで,入力された力の関係性を可視化するための重 量観測機を導入する.これにより,図 2(a)のように 上から受ける力が不足している場合に,重量観測器 が少ない値を指し示すことで力の不足を認識させる ことに寄与すると考えられる. 図2 で示した問題に対して,上に置かれた対象物 に反応してメーターの針が動く重量観測機をEBS に 導入した例を図6 に示す.左側の画面が正しいふる まいであり,右側の画面は図 2(a)の誤答をもとにし て診断を行ったものである.重量観測器は,観測器 の上に位置する物体が下向きに押す力を示す.図 6 の観測器に注目すると,下側の観測器が示す値が正 答と誤答で異なっていることがわかる.右側の図 2(a)をもとにしたシミュレーションでは,下の物体 にかかる下向きの力の不足分だけ指し示す値が少な くなっており,このような観測器の挙動によって, 力の不足に気づくことが期待できる. 学習者の解答 ふるまいによる 可視化が容易 正しい解答 ふるまいから 誤り認識が困難 Yes Yes No No 上下方向の 力が正しい 左右方向の 力が正しい図6 重量観測器の導入事例
3.2 速度観測器の導入
2.2.2 で述べたように,速度に定性差がある誤りに ついては運動を用いた可視化が有効であるが,加速 度の定性差がある運動では気づきづらいと考えられ る.そこで,速度を可視化するための速度観測機を 導入し,加速度の定性差への気づきを促す. 図4 で示した問題に対して,速度観測機を導入し た例を図7 に示す.上側の画面が正しいふるまいで あり,下側の画面は図 4(a)の誤答をもとにして診断 を行ったものである.正答は等速運動を行うため, 速度観測器は一定の値を指した状態のままとなる. これに対して,誤答に対応する速度観測器は加速す る運動とともに針が動く.このことで,正答におけ る観測器の針の静止(定性値が0)と,誤答における 観測器の針の運動(定性値が+)の差から,誤りの可 視化を行うことが可能となる. 図7 速度観測器の導入事例3.3 観測器の提示条件
前節までで示した観測器の存在するシミュレーシ ョンを与えるべき状況について検討した.学習者の 解答が正答の場合や,従来EBS が行っていたふるま いによる可視化が可能であると考えられる例に対し ては観測器を用いる必要がないため,従来EBS と同 じくふるまいを生成し学習者に提示することとした. 一方で,図 3 および図 5 において示された従来 EBS のみで誤りの気づきが困難であると考えられる 例に対しては,該当する誤答を行った学習者に対し て,図8 のように観測器を付加したふるまいを見る ようシステムがフィードバックを行う.このように, 学習者の解答を診断し,誤りの気づきに観測器が有 用となる際に絞って観測器を用いることができるよ う,システムを設計した. 図8 観測器の使用を促すフィードバック4 評価実験
本研究で導入した観測器による,学習者による誤 りの気づきに対する効果を検証するために,以下の 方法で実験を行った.4.1 目的
本システムで導入した観測器に対する妥当性・有 効性を検証した評価実験について報告する. (a)観 測器を導入した本システムと従来システムの間で学 習効果が観測されるか,(b)システム利用後の学習者 の感想において観測器がどのように評価されるか, の2 点を評価する.4.2 方法
初等力学を学んだ経験のある,大学生10 名および 大学院生6 名を被験者とした.システム利用におい て観測器のあるEBS を用いる実験群 9 名(うち大学 院生2 名),観測器のない従来 EBS を用いる統制群 7 名(うち大学院生 4 名)に被験者を割り振り,以 下の手順で実験を行った. (1)事前テスト① : 学習課題(5 分) (2)事前テスト② : 応用課題(5 分)(3)事前テスト③ : 転移課題(5 分) (4)システム利用(20 分) (5)事後テスト① : 学習課題(5 分) (6)事後テスト② : 応用課題(5 分) (7)事後テスト③ : 転移課題(5 分) (8)事後テスト④ : 説明課題(5 分) (9)システム・テストに関するアンケート 実験の前に,実験やシステムの操作に関する十分 な説明を行った. (1)-(3)および(5)-(7)では,出題された現象に対し て矢印を直接記入する形で力を回答する問題で構成 されたペーパーテストを行った.テストは1 回あた り静止系2 問と運動系 2 問で構成されており,合計 で静止系6 問と運動系 6 問の合計 12 問を使用した. 実験で使用した課題を図9,図 10,図 11 に示す.こ れらのテストは,篠原らによる先行研究[2]で用いた テスト課題から抜粋して利用した.(1)と(5),(2)と(6), (3)と(7)の各テストは事前と事後で同じ問題を使用 した.(8)のテストでは,図 12 の誤答を被験者に示し た上で,その誤答がなぜ間違いであるかを説明させ るペーパーテストを実施した. (4)では,図 9 に示した 4 問を学習課題として, タブレットを用いたシステムで順に解答を行う.こ のとき実験群と統制群で別のシステムを用い,実験 群には観測器のあるEBS を使用させ,統制群には観 測器のない従来のEBS を用いて学習を行わせた.課 題自体には違いがなく,実験群統制群ともに学習課 題を(a),(b),(c),(d)の順に解き,20 分間でなるべく 多くの問題に取り組むよう指示を出した. アンケートは自由記述を除いて各項目で6 件法(6: とてもそう思う,5:そう思う,4:ややそう思う,3:や やそう思わない,2:そう思わない,1:とてもそう思わ ない)による選択式での回答を依頼した. テスト結果より(a)学習効果について調査した.ま た,アンケートの結果をもとに(b)観測器の評価につ いて調査を行った. (a) (b) (c) (d) 図9 学習課題
F
F
F
(a) (b) (c) (d) 図10 応用課題 (a) (b) (c) (d) 図11 転移課題 図12 説明課題4.3 結果
実験の中で行った事前および事後テストのそれぞ れの問題に対する正答者数を表1 に示す.実験群の 被験者は,システム利用後の事後テストにおいて全 員が全ての静止系課題に正解していた.問題ごとに 見ると,正解者数の増加が特に静止系を中心として 統制群よりも実験群が大きい結果となっている. 表1 事前事後テスト正解者数 次に,テストの平均点を表2 に示す.事前テスト 全体の実験群平均は6.0 点,統制群平均は 5.0 点であ った.事後テストでは実験群平均が10.4 点,統制群 平均が 8.4 点となり,実験群統制群ともに点数は向 上したものの,差分,すなわち点数の伸び幅につい ては実験群が大きい結果となった.表3 は,表 2 を 満点からの割合で示した正解率の表である.テスト 結果を静止系と運動系に分けて見ると,特に静止系 において実験群に良い結果が得られた.このため, 本システムは静止系に対する理解を促す効果が大き かった可能性がある. 表2 事前事後テスト平均正答数 正解者数 静止系 運動系 学習 応用 転移 学習 応用 転移 A b a b A b a b a b a b 実験群 (9 名) 事前 8 1 6 4 8 6 2 4 4 5 3 3 事後 9 9 9 9 9 9 7 7 8 9 2 7 統制群 (7 名) 事前 6 0 4 4 7 6 0 2 2 3 1 0 事後 7 5 6 4 7 7 5 5 4 4 1 4 点数 実験群 統制群 事前 事後 差分 事前 事後 差分 正解数 6.0 10.4 4.4 5.0 8.4 3.4 静止系 3.7 6.0 2.3 3.9 5.1 1.3 運動系 2.3 4.4 2.1 1.1 3.3 2.1F
表3 事前事後テスト平均正答率 また,観測器の効果について, 6 件法で行ったア ンケートの結果の一部を表4 に示す.まず,観測器 の存在するシミュレーションが学習者自身の誤りの 気づきに繋がったかどうかを項目(1)から考察する. このアンケート項目では,6 に近いほど「不正解の理 由が分からない問題があった」ことを,1 に近いほど 「不正解の理由がわからない問題がなかった」こと を示し,統制群と比較して実験群はシミュレーショ ンを通した理解を行うことができたと自己評価して いることがわかる.この項目で「分からない問題が なかった」に相当する3,2,1 を回答した人数は,実験 群が9 人中 5 人,統制群が 7 人中 1 人であった. 次に,重量と速度の観測器それぞれの機能が学習 の際に有用であったかを,実験群に対してのみ行っ たアンケート項目(2)および(3)から考察すると,いず れも平均値より高い評価が得られた.また,項目(2) における「誤りに気づくきっかけになると思う」に 相当する6,5,4 を回答した人数は 8 人中 6 人であり, 同じく項目(3)においては 9 人中 8 人であった.この ことから,実験に参加した多くの被験者が観測器を 誤りに気づくためのツールとして肯定的に捉えてお り,特に速度の観測器についてはよい評価が得られ ていたことがわかる. 表4 アンケート結果