未知領域探索のための自律ロボットの効率的な移動経路決定法
2
0
0
全文
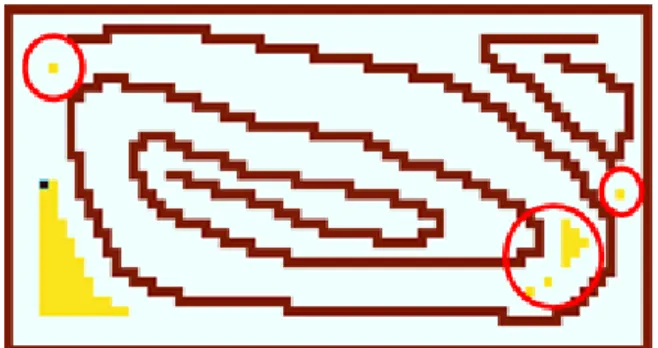
(2) 情報処理学会第 77 回全国大会. でをカットし、初期位置から現在位置までのよ り短い経路に更新する。処理が終了して初期位 置に戻るときに、こうして求めた経路を利用す ることで、矩形分割による経路探索が困難な場 合に対応する。また次のシードポイントに移動 する経路探索が困難な場合も、この経路を利用 して移動することで、矩形分割による経路探索 が可能な位置を探す。通過経路を利用する場合 も、矩形分割による経路探索は行い経路が見つ かればそちらを利用する。 図 1 に示すように、カバーの過程で小さく孤 立したターゲット領域が残ることがある。現在 位置や初期位置から遠く離れた孤立ターゲット が多く残ると、長距離の無駄な移動が発生し、 処理効率を大幅に低下させる原因となる。特に 現在のカバー作業が終了後に、図中の赤丸で囲 まれたターゲットに向かうために長い移動が必 要となる。こうした孤立ターゲット領域が残る 過程を示したのが図 2 である。カバーによりタ ーゲット領域の分割が発生する。スパイラル被 覆動作だけに従って一方の領域の被覆を続け、 その領域のカバーが、分割された領域から遠く 離れた点で終了した場合、残された領域まで無 駄な移動が必要になる。また、孤立したターゲ ット領域の初期配置位置からの距離も問題とな る。初期配置位置から近い場合は、戻ってくる 過程で被覆できるので無駄な移動が少なくて済 むが、遠い場合は無駄な移動が増加する。 これを回避するために、ターゲット領域が分 割されるとき、それぞれの領域の大きさと孤立 状態を調べる。小さい孤立領域が見つかった場 合は、初期配置位置からのより遠いものを優先 して選択する。初期位置からの遠近は、ロボッ トの現在位置、経路上のひとつ前のノードの位 置、孤立領域の位置から判定する。. 実験結果より、提案する孤立ターゲット領域 発生回避法を導入することで、カバー終了まで にかかる時間が短縮され、探索効率が向上した ことが確認できた。 参考文献 (1) E. Gerlein, E. Gonzalez, Multirobot cooperative model applied to coverage of unknown regions, Multi-Robot Systems, Trends and Development, InTech, pp. 109-130, 2011. (2) H. Yamachi, Tsujimura, Y. Kambayashi and T. Iida, Evaluation of multi-agent simulation for coverage algorithm on unknown field, Proceeding of The 16th Asia Pacific Symposium on Intelligent and Evolutionary Systems (IES 2012), pp. 141-146, 2012. (3) H. Yamachi, Y. Tsujimura and Y. Kambayashi and H. Yamamoto, Structural influence of fields on the performance of the unknown field coverage algorithm by means of multi-agent, Proceedings of 16th Asia Pacific Symposium on Intelligent and Evolutionary Systems (IES 2012), CD-ROM, 2012. (4) H. Yamachi, Y. Tsujimura and Y. Kambayashi, Influence of field structure on the multi-agent coverage algorithm on unknown fields, Journal of Advanced Computational Intelligence and Intelligent Informatics, Vol.17 No.6, pp.883-889, 2013.. 4.シミュレーション実験と結果の考察 提案手法の効果を明らかにするために、5 種 類(Spiral、Block、Cshape、Wall、Bmp)のフィ ールドを用いてシミュレーションによる実験を 行った。実験は、初期位置をフィールドの周囲 の辺の上にランダムに設定し、初期位置からカ バーを開始して、カバー終了後に元の位置に戻 るまでの時間を計測した。それぞれ 10 回ずつ実 行し、実行時間の平均、最大、最小、分散を求 め、表 1 にまとめた。表中、ターゲット領域が 分割される際に小さい孤立ターゲット領域が見 つかった場合、“on” は初期配置位置からのよ り 遠 い も の を 優 先 し て 選 択 する操作を行い、 “off”は行わないことを示す。. 1-212. 図1. 孤立したターゲット領域の例. 孤立したターゲット領域. 図2. 孤立したターゲット領域の出現課程. 表1. シミュレーション実験の結果. Copyright 2015 Information Processing Society of Japan. All Rights Reserved..
(3)
図
関連したドキュメント
In this paper, we focus on the existence and some properties of disease-free and endemic equilibrium points of a SVEIRS model subject to an eventual constant regular vaccination
Classical definitions of locally complete intersection (l.c.i.) homomor- phisms of commutative rings are limited to maps that are essentially of finite type, or flat.. The
Yin, “Global existence and blow-up phenomena for an integrable two-component Camassa-Holm shallow water system,” Journal of Differential Equations, vol.. Yin, “Global weak
We study the classical invariant theory of the B´ ezoutiant R(A, B) of a pair of binary forms A, B.. We also describe a ‘generic reduc- tion formula’ which recovers B from R(A, B)
After performing a computer search we find that the density of happy numbers in the interval [10 403 , 10 404 − 1] is at least .185773; thus, there exists a 404-strict
The aim of this paper is to prove existence, uniqueness, and continu- ous dependence upon the data of solutions to mixed problems for pluri- parabolic equations with nonlocal
For X-valued vector functions the Dinculeanu integral with respect to a σ-additive scalar measure on P (see Note 1) is the same as the Bochner integral and hence the Dinculeanu
Finally, in Figure 19, the lower bound is compared with the curves of constant basin area, already shown in Figure 13, and the scatter of buckling loads obtained
