マルチGNSS
基準周波数発生器
型式
GF-8701, GF-8702,
GF-8703
機器仕様書
IMPORTANT NOTICE
本書に記載された内容を発行元(古野電気株式会社)の書面による許可なく複写、複製、転載および第三者へ開示 することを禁止します。
FURUNO ELECTRIC CO., LTD. All rights reserved. 記載の製品、仕様は予告なく変更することがあります。 本書に記載されている社名、製品名は、一般に各開発メーカーの登録商標または商標です。 GPS(米国)、GLONASS(ロシア)、QZSS(日本)、SBAS(WAAS(米国)、EGNOS(欧州)、MSAS(日本))はそれぞ れを所持する国が管理・運用するシステムです。それらの運用によっては、測位性能が著しく劣化することがあります。 本仕様書に記載されている事項は、上記の場合を含めて保証したものではありません。これらの利用にあたっては、 本システムの特性を十分理解し、使用者の責任においてその利益を活用することが必要です。
改訂歴
Version 改訂内容 改訂日 0 G14-000-10-004-5から全面改訂 2017.02.27 1 表7.2 仕様条件の誤記訂正 2017.07.20 2 7.1節のタイトルを修正 2017.11.09 3 表4.1のNoteを削除 2017.11.28 4 17章 梱包仕様に正規ロット数に関する説明追加 2018.06.14目次
1 概要 ··· 1 2 製品ブロック図 ··· 1 3 GNSS一般仕様 ··· 2 4 GNSS一般性能 ··· 3 5 入出力信号仕様 ··· 4 6 電気的仕様 ··· 5 6.1 絶対最大定格 ··· 5 6.2 Power Supply ··· 5 6.3 インターフェイス信号 ··· 6 6.4 リセット ··· 6 6.4.1 内蔵パワーオンリセット ··· 6 6.4.2 外部リセット ··· 6 6.5 UARTタイミング ··· 7 6.5.1 外部リセットを使用しない場合 ··· 7 6.5.2 外部リセットを使用する場合 ··· 7 6.5.3 ボーレートと誤差の関係 ··· 8 6.6 アンテナ ··· 8 6.6.1 推奨アンテナ ··· 8 6.6.2 アンテナプリアンプ電源出力 ··· 9 6.6.3 RF_COAXとRF_PIN ··· 9 7 VCLK・GCLK・PPS信号仕様 ··· 10 7.1 ロック状態(Fine Lock時) ··· 10 7.2 ホールドオーバ状態 ··· 11 7.3 整定時間 ··· 12 7.4 PPS・VCLK出力の位相関係 ··· 12 8 インターフェイス信号仕様 ··· 13 8.1 アラーム信号(ALM_N) ··· 13 8.2 ロック信号(LOCK) ··· 13 8.3 外部同期用PPS入力信号(EPPS) ··· 13 8.4 バックアップ電源(VBK) ··· 13 9 状態遷移 ··· 13 10 環境仕様 ··· 14 11 RoHS··· 14 12 難燃性 ··· 14 13 FIT値 ··· 14 14 信頼性試験項目 ··· 14 15 内部等価回路 ··· 15 16 機械的仕様 ··· 16 16.1 外形図 ··· 16 17 梱包仕様 ··· 17 18 保証 ··· 18 19 特記事項 ··· 19 19.1 使用上の注意 ··· 19 19.2 使用部品について ··· 19 19.3 実装に関する注意事項 ··· 19 19.4 工業所有権に関する注意事項 ··· 20 19.5 安全保障輸出規制 ··· 201 概要
本書は、古野電気製 GNSSDO1)(GF-8701, GF-8702, GF-8703)の仕様について記述します。 GNSSDO の特徴は以下の通りです。 GPS、SBAS、GLONASS、QZSS に対応しています。2) UTC 時刻に同期した精度の高いタイムパルス(1PPS)を出力します。 タイムパルス(1PPS)と同期したクロック(10MHz)出力が可能です。 プログラム書き込み可能な Flash ROM を内蔵しています。 CW ジャマーに有効なアンチ・ジャミング機能を持っています。 耐マルチパス機能を持っています。 高感度での受信(GPS:-161 dBm (Hot acquisition))が可能です。 LDO を内蔵しているためユーザー側の高精度、高安定、低雑音の電源は不要です。 GNSS 信号入力に関して同軸コネクタ(RF_COAX)か IF コネクタ(RF_PIN)の選択ができます。 GF-8701、GF-8702、GF-8703 はピンコンパチ3)で使用可能です。 Notes: 1) GNSS Disciplined Oscillator の略 2) GPS、SBAS、GLONASS、QZSS をまとめて GNSS と称します。 3) 消費電力、PPS、10MHz の仕様は異なります。2 製品ブロック図
Multi GNSS receiver chip eRideOPUS 7 Serial Flash ROM Antenna detectionblock with over current detection function
System power supply block
ITXD IALM_N ILOCK IGCLK Reset control block ESD Protector 26MHz TCXO block 10MHz oscillator block External interface block VCC_XO IRXD IEPPS VCLK IRST_N TXD ALM_N LOCK GCLK RXD EPPS RST_N VANT RF_COAX VCC VBK VANT 3.3V RF_PIN 図 2.1 GF-8701/02/03ブロックダイアグラム
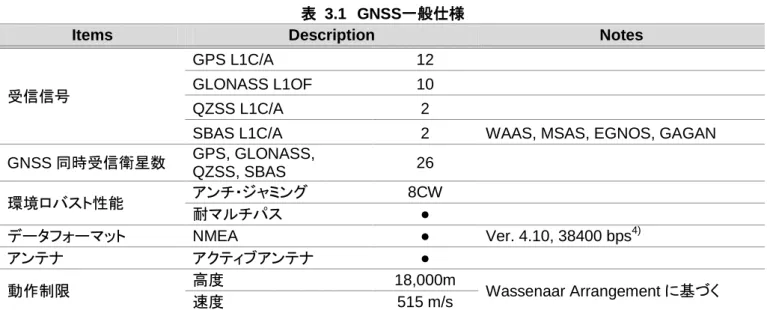
3 GNSS 一般仕様
表 3.1 GNSS一般仕様
Items Description Notes
受信信号
GPS L1C/A 12
GLONASS L1OF 10
QZSS L1C/A 2
SBAS L1C/A 2 WAAS, MSAS, EGNOS, GAGAN GNSS 同時受信衛星数 GPS, GLONASS, QZSS, SBAS 26 環境ロバスト性能 アンチ・ジャミング 8CW 耐マルチパス ● データフォーマット NMEA ● Ver. 4.10, 38400 bps4) アンテナ アクティブアンテナ ● 動作制限 高度 18,000m Wassenaar Arrangement に基づく 速度 515 m/s Notes: 4) プロトコル仕様書を参照ください。
4 GNSS 一般性能
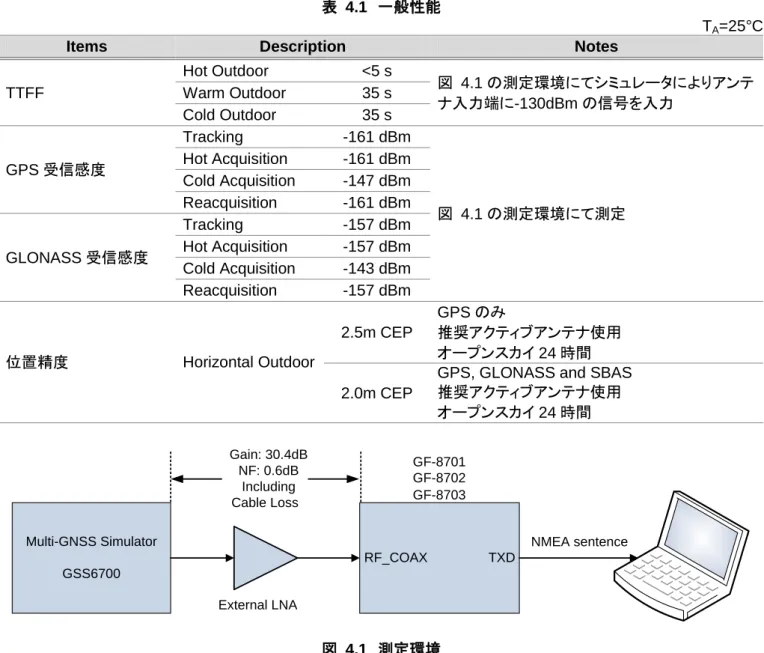
表 4.1 一般性能
TA=25°C
Items Description Notes
TTFF Hot Outdoor <5 s 図 4.1 の測定環境にてシミュレータによりアンテ ナ入力端に-130dBm の信号を入力 Warm Outdoor 35 s Cold Outdoor 35 s GPS 受信感度 Tracking -161 dBm 図 4.1 の測定環境にて測定 Hot Acquisition -161 dBm Cold Acquisition -147 dBm Reacquisition -161 dBm GLONASS 受信感度 Tracking -157 dBm Hot Acquisition -157 dBm Cold Acquisition -143 dBm Reacquisition -157 dBm 位置精度 Horizontal Outdoor 2.5m CEP GPS のみ 推奨アクティブアンテナ使用 オープンスカイ 24 時間 2.0m CEP
GPS, GLONASS and SBAS 推奨アクティブアンテナ使用 オープンスカイ 24 時間 Multi-GNSS Simulator GSS6700 RF_COAX External LNA Gain: 30.4dB NF: 0.6dB Including Cable Loss GF-8701 GF-8702 GF-8703 NMEA sentence TXD 図 4.1 測定環境 ▲3
5 入出力信号仕様
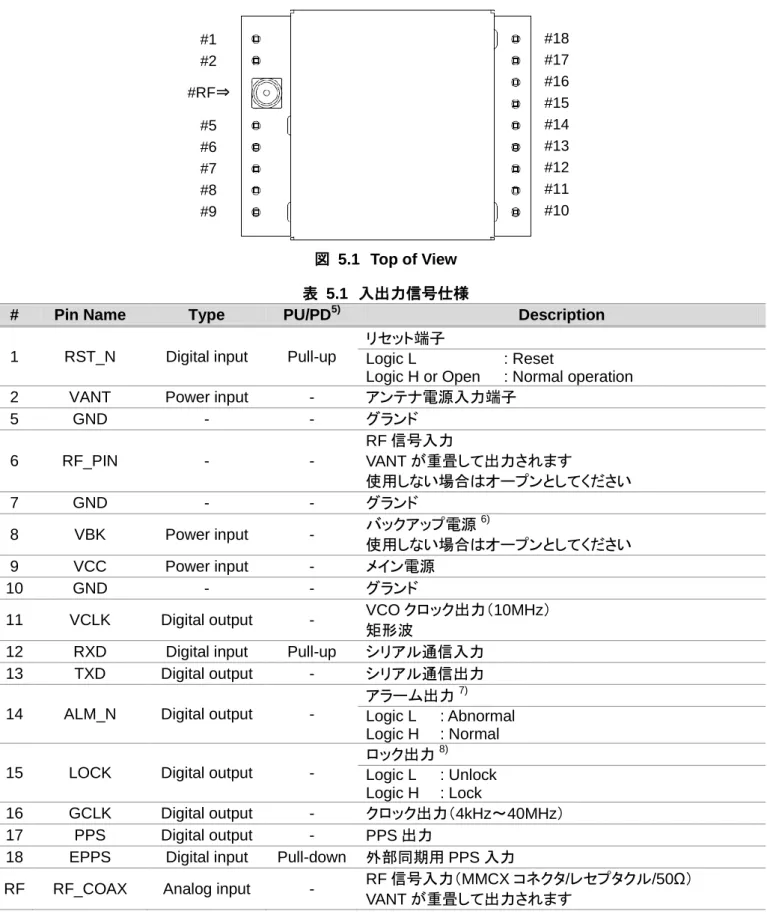
図 5.1 Top of View 表 5.1 入出力信号仕様
# Pin Name Type PU/PD5) Description
1 RST_N Digital input Pull-up
リセット端子 Logic L
Logic H or Open
: Reset
: Normal operation 2 VANT Power input - アンテナ電源入力端子
5 GND - - グランド 6 RF_PIN - - RF 信号入力 VANT が重畳して出力されます 使用しない場合はオープンとしてください 7 GND - - グランド 8 VBK Power input - バックアップ電源 6) 使用しない場合はオープンとしてください 9 VCC Power input - メイン電源 10 GND - - グランド
11 VCLK Digital output - VCO クロック出力(10MHz) 矩形波
12 RXD Digital input Pull-up シリアル通信入力 13 TXD Digital output - シリアル通信出力 14 ALM_N Digital output -
アラーム出力7)
Logic L Logic H
: Abnormal : Normal 15 LOCK Digital output -
ロック出力8) Logic L Logic H : Unlock : Lock 16 GCLK Digital output - クロック出力(4kHz~40MHz) 17 PPS Digital output - PPS 出力
18 EPPS Digital input Pull-down 外部同期用 PPS 入力
RF RF_COAX Analog input - RF 信号入力(MMCX コネクタ/レセプタクル/50Ω) VANT が重畳して出力されます Notes: 5) プルアップ抵抗、プルダウン抵抗の値は表 6.3 を参照ください。 6) バックアップ電源に関しては 8.4 節を参照ください。 7) アラーム出力条件は 8.1 節を参照ください。 8) ロック出力条件は 8.2 節を参照ください。 #18 #17 #16 #15 #14 #13 #12 #11 #10 #1 #2 #5 #6 #7 #8 #9 #RF⇒
6 電気的仕様
6.1 絶対最大定格
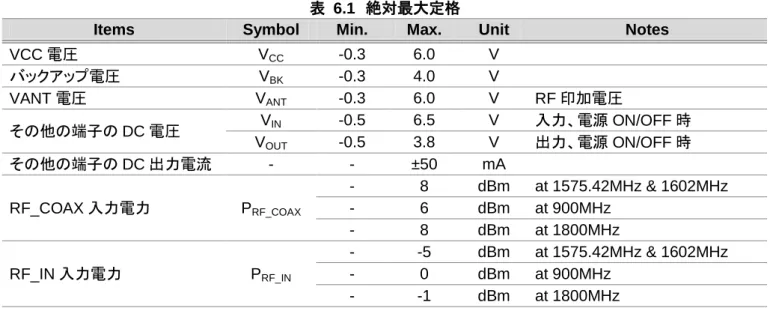
以下の表に記載されている範囲は表 10.1 に示す動作温度範囲で使用した場合の値です。この範囲を超えて使用 すると、モジュールに損傷を与える恐れがあります。
表 6.1 絶対最大定格
Items Symbol Min. Max. Unit Notes
VCC 電圧 VCC -0.3 6.0 V バックアップ電圧 VBK -0.3 4.0 V VANT 電圧 VANT -0.3 6.0 V RF 印加電圧 その他の端子の DC 電圧 VIN -0.5 6.5 V 入力、電源 ON/OFF 時 VOUT -0.5 3.8 V 出力、電源 ON/OFF 時 その他の端子の DC 出力電流 - - ±50 mA RF_COAX 入力電力 PRF_COAX - 8 dBm at 1575.42MHz & 1602MHz - 6 dBm at 900MHz - 8 dBm at 1800MHz RF_IN 入力電力 PRF_IN - -5 dBm at 1575.42MHz & 1602MHz - 0 dBm at 900MHz - -1 dBm at 1800MHz
6.2 Power Supply
表 6.2 電源仕様TA=25°C, unless otherwise stated
Items Symbol Min. Typ. Max. Unit Notes
VCC 電圧 VCC 3.5 3.7 3.9 V アンテナ供給電圧 VANT 2.7 - 5.5 バックアップ電圧 VBK 1.4 - 3.6 V VBK 使用時 VCC 立ち上がりスルーレート VCC_SR - - 3.9x104 V/s 図 6.1 参照 VBK 立ち上がりスルーレート VBK_SR 3.6 - 3.6x104 V/s 図 6.1 参照 消費電流(起動時) GF-8701 ICC_WU01 - - 150 mA GF-8702 ICC_WU02 - - 800 mA GF-8703 ICC_WU03 - - 1400 mA 消費電流(安定時) GF-8701 ICC_ST01 - - 150 mA GF-8702 ICC_ST02 - 450 - mA GF-8703 ICC_ST03 - 600 - mA バックアップ電流(バックアップ時) IBKN - 9 20 μA VCC=0V バックアップ電流(通常動作時) IBKB - 0.4 2 μA VCC=3.7V 図 6.1 立ち上がり時間 VCC VBK VCC_SR VBK_SR
6.3 インターフェイス信号
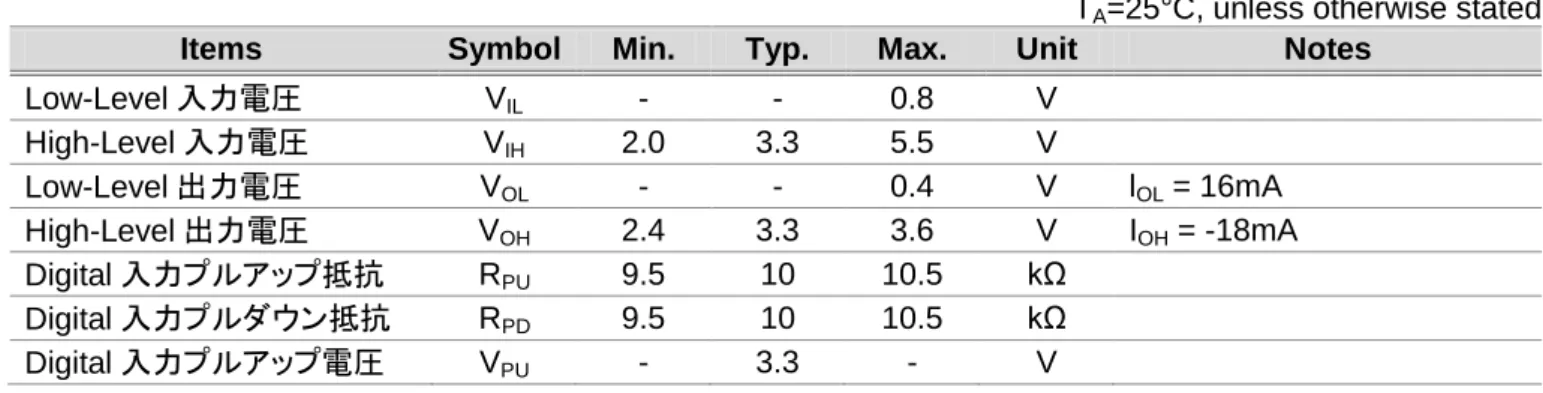
表 6.3 インターフェイス信号仕様
TA=25°C, unless otherwise stated
Items Symbol Min. Typ. Max. Unit Notes
Low-Level 入力電圧 VIL - - 0.8 V High-Level 入力電圧 VIH 2.0 3.3 5.5 V Low-Level 出力電圧 VOL - - 0.4 V lOL = 16mA High-Level 出力電圧 VOH 2.4 3.3 3.6 V IOH = -18mA Digital 入力プルアップ抵抗 RPU 9.5 10 10.5 kΩ Digital 入力プルダウン抵抗 RPD 9.5 10 10.5 kΩ Digital 入力プルアップ電圧 VPU - 3.3 - V
6.4 リセット
6.4.1 内蔵パワーオンリセット GNSSDO は VCC を監視するパワーオンリセット回路を内蔵しており、外部リセットは不要です。表 6.4 にパワーオ ンリセットの閾値電圧を示します。 表 6.4 パワーオンリセットの閾値電圧TA=25°C, unless otherwise stated
Items Symbol Min. Typ. Max. Unit Notes
パワーオンリセット閾値電圧(立ち上がり) VRTH_POR - - 3.3 V パワーオンリセット閾値電圧(立ち下がり) VFTH_POR 2.7 - - V 6.4.2 外部リセット GNSSDO は、外部リセット信号(RST_N)による制御が可能です。 tRSTLW L H 図 6.2 リセットシーケンス 表 6.5 リセットシーケンス
Items Symbol Min. Max. Unit Notes
6.5 UART タイミング
6.5.1 外部リセットを使用しない場合 VCC TXD RXD H L Valid t1ITXD1 t1IRXD1 Ready VRTH_POR 図 6.3 UARTタイミング 表 6.6 UARTタイミングItems Symbol Min. Max. Unit Notes
VCC が VRTH_PORとなった後、シリアルデータ出力が有効に なるまでの時間 t1ITXD1 - 6 s VCC が VRTH_PORとなった後、ホスト側からのシリアルデー タ入力が有効になるまでの時間 t1IRXD1 - 6 s 6.5.2 外部リセットを使用する場合 RST_N TXD RXD H L Valid t1XTXD1 t1XRXD1 Ready 図 6.4 UARTタイミング 表 6.7 UARTタイミング
Items Symbol Min. Max. Unit Notes
RST_N が動作電圧となった後、シリアルデータ出力が有
効になるまでの時間 t1XTXD1 - 6 s
RST_N が動作電圧となった後、ホスト側からのシリアル
6.5.3 ボーレートと誤差の関係
UART のボーレートと誤差の関係は以下の通りです。 ボーレートは 71.5MHz のクロックから生成しています。
表 6.8 ボーレートと誤差(TXD)
Baud rate [bps] Deviation error [%]
4800 +0.00 9600 +0.11 19200 -0.11 38400 +0.32 57600 -0.54 115200 -0.54 230400 +2.08 460800 -3.02 シリアル通信入力 RXD のボーレートと許容できる誤差の関係は表 6.9 の通りです。 表 6.9 ボーレートと誤差(RXD)
Baud rate [bps] Tolerance error [%]
Lower limit Tolerance error [%] Upper limit 4800 -4.64 5.26 9600 -4.53 5.38 19200 -4.74 5.15 38400 -4.33 5.60 57600 -5.15 4.70 115200 -5.15 4.70 230400 -2.65 7.45 460800 -7.52 2.08
6.6 アンテナ
6.6.1 推奨アンテナ 表 6.10 推奨アンテナItems Min. Typ. Max. Unit Notes
GPS 中心周波数 - 1575.42 - MHz バンド幅 2.046 MHz GLONASS 中心周波数 - 1602 - MHz バンド幅 9 MHz アンテナ利得 0 - - dBi プリアンプ利得 15 - 35 dB ケーブルロスを含む プリアンプ NF - - 3.5 dB インピーダンス - 50 - Ω VSWR - - 2 -
6.6.2 アンテナプリアンプ電源出力 2 番ピン(VANT)から入力される電源はアンテナコネクタ(RF_COAX)もしくはインターフェイスコネクタ(RF_PIN) に重畳して出力することができます。デフォルトは ON であり、コマンドにより OFF にすることが可能です。また電流値 の異常を検出し、アラーム(ALM_N)を出力し、ショート判定時のみ出力を止めます。 アンテナプリアンプ電源出力仕様を表 6.11 に示します。 表 6.11 アンテナプリアンプ電源出力
Items Symbol Min. Typ. Max. Unit Notes
アンテナプリアンプ出力電圧 VAPO VANT-0.5 - - V @ IAPO=75mA
アンテナプリアンプ出力電流 IAPO - - 75 mA アンテナオープン検出電流 IAOD - 5 10 mA アンテナショート検出電流 IASD 80 85 - mA アンテナ出力電流制限 IAOL - - 200 mA ショート時 アンテナプリアンプ電源出力は電流逆流防止機能を持っています。この機能によって 1 つのアンテナに対して複数 の GNSSDO を接続することができます。ユーザーは冗長化のために DC カットを用意する必要はありません。 6.6.3 RF_COAX と RF_PIN
RF_COAX と RF_PIN は GNSS 信号入力ピンです。RF_COAX を使用することでユーザーは高周波回路設計を 省略することができるため設計や評価期間を短縮することができます。RF_PIN を使用することで RF_COAX に接続 する為の特殊ケーブルをユーザーは用意する必要がなくなるためコストダウンすることができます。
ユーザーは RF_COAX と RF_PIN のどちらか片方を使用することができます。RF_COAX はアンテナ同軸ケーブ ルを本製品の MMCX コネクタに直接接続する場合にご使用ください。RF_PIN は GNSS 信号をユーザー基板からマ イクロストリップライン経由で入力する場合にご使用ください。マイクロストリップラインに関しては「FURUNO
GPS/GNSS 受信機 86/87 モジュールデザインガイド(SE13-900-000)」を参照してください。
RF_COAX と RF_PIN は同時に使用することができません。コマンドによる切り替えが必要となります。デフォルト は RF_COAX に設定されています。RF_COAX に設定している場合は RF_PIN に GNSS 信号が入力されていても、 使用されません。
7 VCLK・GCLK・PPS 信号仕様
7.1 ロック状態(Fine Lock 時)
GNSS 衛星が送信している時刻情報に対してロックしている状態の VCLK、GCLK、PPS の仕様値を表 7.1 に示し ます。 表 7.1 ロック状態の仕様 VCC=3.7VSymbol Items Specification Unit Notes
PPS 公称周波数 1 Hz 温度勾配:<±20°C/H オープンスカイ パルス比9) 50(typ) % タイミング確度10)11) <±100 ns タイミング精度(1σ)10) <±15 ns VCLK 公称周波数 10 MHz 長期安定度 (24 時間平均周波数) GF-8701 <±1E-11 - GF-8702 <±1E-12 - GF-8703 <±1E-12 - 短期安定度 (ルートアラン分散(τ=1s)) GF-8701 <1E-9 - GF-8702 <2E-10 - GF-8703 <2E-10 - GCLK 周波数可変範囲9) 0.004 to 40 MHz 温度一定 オープンスカイ 長期安定度(24 時間平均周波数) <±5E-11 - 精度(3σ) <±3E-9 - トータルジッタ <±8 ns Notes: 9) コマンドにより変更が可能です。 10) 固定位置推定モードと位置固定モードの場合の値です。 11) 本項目の同期対象は、コマンドにより選択可能です(デフォルトは UTC(USNO))。また、本項目を満たすには、ケ ーブルディレイを正しく設定している必要があります。 ▲2
7.2 ホールドオーバ状態
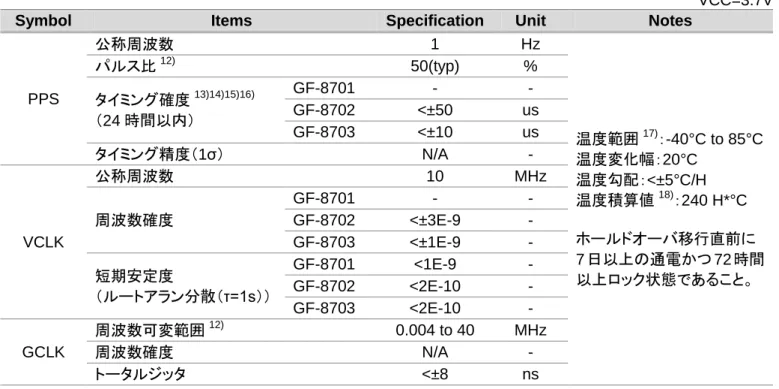
ロック状態から GNSS 衛星が送信している時刻情報を取得できなくなった状態の VCLK、GCLK、PPS の仕様値を 表 7.2 に示します。外部同期を使用する場合は、本仕様の対象外といたします。
表 7.2 ホールドオーバ仕様
VCC=3.7V
Symbol Items Specification Unit Notes
PPS 公称周波数 1 Hz 温度範囲17):-40°C to 85°C 温度変化幅:20°C 温度勾配:<±5°C/H 温度積算値18):240 H*°C ホールドオーバ移行直前に 7 日以上の通電かつ 72 時間 以上ロック状態であること。 パルス比12) 50(typ) % タイミング確度13)14)15)16) (24 時間以内) GF-8701 - - GF-8702 <±50 us GF-8703 <±10 us タイミング精度(1σ) N/A - VCLK 公称周波数 10 MHz 周波数確度 GF-8701 - - GF-8702 <±3E-9 - GF-8703 <±1E-9 - 短期安定度 (ルートアラン分散(τ=1s)) GF-8701 <1E-9 - GF-8702 <2E-10 - GF-8703 <2E-10 - GCLK 周波数可変範囲12) 0.004 to 40 MHz 周波数確度 N/A - トータルジッタ <±8 ns Notes: 12) コマンドにより変更が可能です。 13) 固定位置推定モードと位置固定モードの場合の値です。 14) 図 7.1 の環境で測定。 15) GNSSDO はロック時に発振器の周波数変動を学習しホールドオーバ時にその学習結果を反映します。よって例 えばロック時に温度変化がなく、ホールドオーバ時に温度変化があるようなロックとホールドオーバで環境が大き く異なる場合は、上記仕様を満足しなくなる場合があります。 16) 重力加速度の変動により、発振器の周波数は変化します。したがって、ホールドオーバによるタイミング確度のた めには、機器を固定してご使用ください。移動体に取り付けた場合はタイミング確度を満足しない場合があります。 また、振動の大きい環境下でご使用の際もタイミング確度を満足しない場合があります。 17) 本製品の端子温度。 18) 温度変化の時間積分値[H*°C]。ホールドオーバ開始時の温度を基準として 24 時間ごとの積分値。 24H >72H Fine Lock 20 40 8H 8H 24H Temperature (℃) Holdover t Frequency mode 240H・℃ 240H・℃ 240H・℃ ▲1
7.3 整定時間
電源オンからロック状態(Fine Lock)に遷移するまでの時間を表 7.3 に示します。 表 7.3 整定時間
TA=25°C, unless otherwise stated
オープンスカイ VCC OFF 期間 VBK 状態 VCC OFF 前の状態 整定時間 5 秒以上 不問 不問 ・vs GPS…<5 分 ・vs UTC…<15 分 5 秒未満 無 有 下記以外の状態 UTC 同期モード19)に設定しており、UTC 同期のステータ ス20)でロックしていること ・vs GPS…<5 分 ・vs UTC…<5 分 Notes: 19) TIMEALIGN コマンドで設定できます。デフォルトは UTC(USNO)同期です。 20) CRW(TPS1)センテンスの「pps status」で確認できます。
7.4 PPS・VCLK 出力の位相関係
PPS と VCLK の位相関係を図 7.2 に示します。この関係はコヒーレントです。 PPS VCLK TPPS(R)_VCLK(R) TPPS(F)_VCLK(R) 図 7.2 PPSとVCLKの位相関係 表 7.4 PPSとVCLKの位相関係Symbol Description Condition Min. Max. Unit
TPPS(R)_VCLK(R)
PPS の立ち上がりに対する
VCLK の立ち上がり遅延時間 frequency mode:
Pull-In, Coarse Lock, Fine Lock
35 55 ns TPPS(F)_VCLK(R)
PPS の立ち下がりに対する
8 インターフェイス信号仕様
8.1 アラーム信号(ALM_N)
CRZ(TPS4)センテンスの”alarm”フィールドの状態が確認できます。表 8.1 にアラーム信号(ALM_N)の仕様を示 します。
表 8.1 アラーム信号仕様
CRZ(TPS4) “alarm field” ALM_N 端子 Description
00 Logic H Normal
00 以外 Logic L Abnormal
8.2 ロック信号(LOCK)
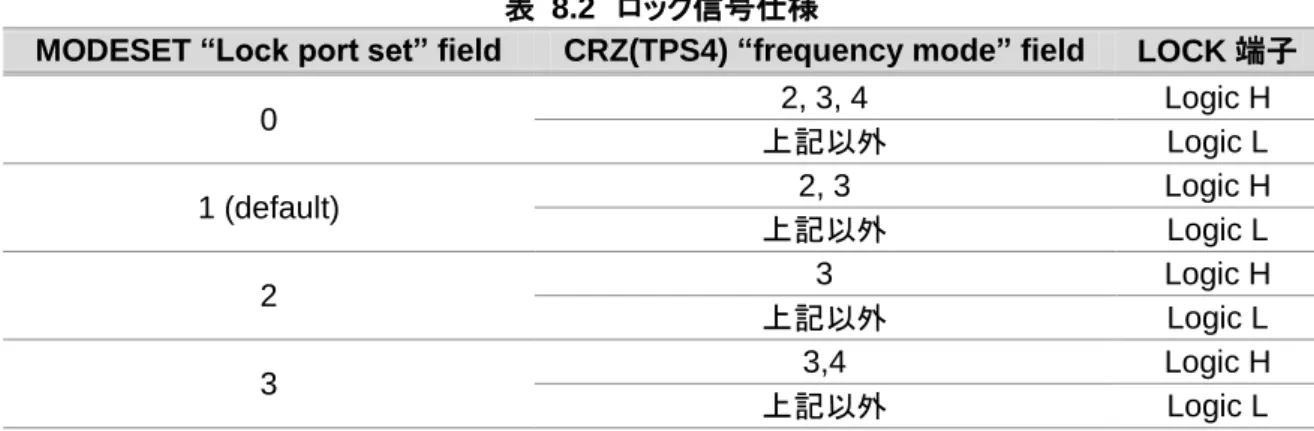
CRZ(TPS4)センテンスの”frequency mode”フィールドの状態が確認できます。MODESET コマンドの”Lock port set”フィールドで LOCK 端子出力条件を設定できます。表 8.2 にロック信号(LOCK)の仕様を示します。
表 8.2 ロック信号仕様
MODESET “Lock port set” field CRZ(TPS4) “frequency mode” field LOCK 端子
0 2, 3, 4 Logic H 上記以外 Logic L 1 (default) 2, 3 Logic H 上記以外 Logic L 2 3 Logic H 上記以外 Logic L 3 3,4 Logic H 上記以外 Logic L
8.3 外部同期用 PPS 入力信号(EPPS)
EPPS 端子に 1 秒パルスを入力しコマンドで設定することで、その入力されるパルスに同期した VCLK および PPS を出力することができます。同期対象は EPPS に入力されるパルスの立ち上がりエッジとなります。設定コマンドはプ ロトコル仕様書の EXTSYNC コマンドを参照してください。8.4 バックアップ電源(VBK)
バックアップ電源(VBK)に電池などを接続した場合、メイン電源断時に各衛星の航法メッセージから得た情報、測 位結果および使用者が設定したコマンドの入力値などを受信機内部のバックアップ RAM(BBRAM)に保存します。こ のバックアップ機能により、メイン電源断からの復帰において、TTFF(表 4.1 Hot Outdoor)の時間および整定時間 (7.3 節)が短縮されます。ただしメイン電源断の直前までにアルマナックおよびエフェメリスの情報を取得しておく必要 があります。GNSSDO が BBRAM にバックアップする内容はプロトコル仕様書の 8 章を参照してください。9 状態遷移
CRZ(TPS4)センテンスの”frequency mode”フィールドで状態遷移を確認できます。10 環境仕様
表 10.1 環境仕様
Items Specification Unit Notes
動作温度 -40 to +85 °C 保存温度 -40 to +85 °C 動作湿度 85 (MAX) %R.H TA= 60°C, 結露なきこと
11 RoHS
RoHS 指令に適合12 難燃性
UL94V-1 準拠13 FIT 値
GF-8701 ---2000FIT GF-8702 ---2500FIT GF-8703 --- 3100FIT 算出条件 - Telcordia 332 issue3 - 部品点数法 - 環境ファクタ:GF - 動作温度:50°C - 品質レベル:レベル 0 - メーカー提示故障率使用:あり14 信頼性試験項目
# Test Item Conditions
1 高温高湿作動 温度湿度 85°C/85%の環境で 1000 時間通電 2 高温高湿放置 温度湿度 85°C/85%の環境で 1000 時間放置 3 低温作動 温度-40°C の環境で 500 時間通電 4 低温放置 温度-40°C の環境で 500 時間放置 5 梱包落下試験 梱包状態で 50cm の高さから自由落下 6 振動試験 無通電状態で XYZ3 方向、10~55Hz、4.7G (46m/s2)、30 分 7 ESD 試験 JIS C 61000-4-2 接触放電
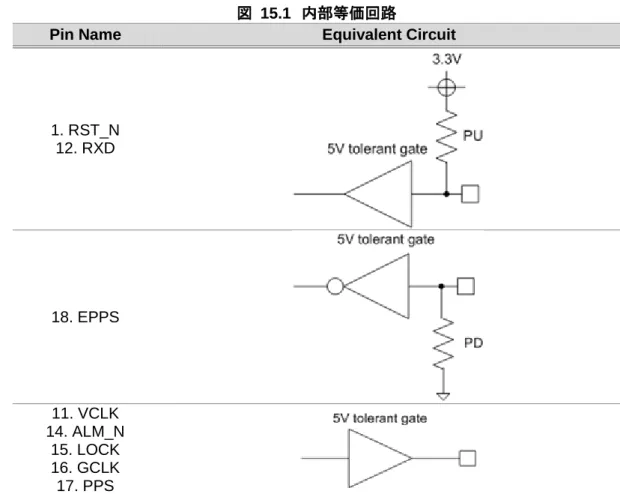
15 内部等価回路
図 15.1 にデジタル信号端子の内部等価回路を示します。
図 15.1 内部等価回路
Pin Name Equivalent Circuit
1. RST_N 12. RXD 18. EPPS 11. VCLK 14. ALM_N 15. LOCK 16. GCLK 17. PPS
16 機械的仕様
16.1 外形図
Notes:
1. Tolerance dimension is ±0.2mm unless otherwise stated. 2. Products label specifications.
X: Products number code
1: GF-8701 2: GF-8702 3: GF-8703 YY: Products unique code
08: GF-8701 09: GF-8702 10: GF-8703
3. It is recommended that the layout of under GF-870x is ground plane. 4. RF connector product number: MMCX1-4024 (CONNEKT)
17 梱包仕様
以下に梱包仕様について説明します。当梱包仕様は正規ロット数(100 個)の出荷時のみに適用します。正規ロット 数に満たない場合の出荷につきましては、別途ご連絡させていただきます。▲4
![表 6.8 ボーレートと誤差(TXD) Baud rate [bps] Deviation error [%]](https://thumb-ap.123doks.com/thumbv2/123deta/6273414.618079/12.892.281.616.215.432/表68ボーレートと誤差TXDBaudratebpsDeviationerror.webp)